Você também pode gostar
- Modelagem CircuitosDocumento50 páginasModelagem CircuitosJeremias RibeiroAinda não há avaliações
- Transformada Laplace e Inversa PDFDocumento23 páginasTransformada Laplace e Inversa PDFAndreea DrăghiciAinda não há avaliações
- Modelos de ProcessosDocumento34 páginasModelos de ProcessosJanaina MaiaAinda não há avaliações
- A1 RevisoMatematica LaplaceDocumento21 páginasA1 RevisoMatematica LaplacebrineniziiziAinda não há avaliações
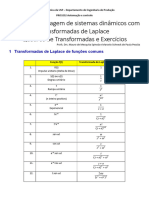
- PRO3252 A04 Laplace Formulas e Exercicios 2023Documento5 páginasPRO3252 A04 Laplace Formulas e Exercicios 2023Diegocalixtohotmail.com CalixtoAinda não há avaliações
- Apostila Transformada de Laplace PDFDocumento11 páginasApostila Transformada de Laplace PDFMarcelo Lopes VieiraAinda não há avaliações
- Aula 1Documento15 páginasAula 1Gabriela AlcantaraAinda não há avaliações
- Aula1 TecomDocumento31 páginasAula1 Tecomdksodaskk100% (1)
- Aula 9 Transformada de LaplaceDocumento54 páginasAula 9 Transformada de LaplaceJoyceCrisAinda não há avaliações
- 2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciaDocumento49 páginas2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciahinnaAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 09Documento9 páginasENG-10933 - Controle de Processos - Aula 09Alessandro JesusAinda não há avaliações
- Aula 1 Funcoes Vetoriais Derivada IntegralDocumento35 páginasAula 1 Funcoes Vetoriais Derivada IntegralNetto SouzaAinda não há avaliações
- DSL Aula 3Documento27 páginasDSL Aula 3Mariana MoreiraAinda não há avaliações
- Controle de Processos - Aula 1Documento27 páginasControle de Processos - Aula 1Cassio AveiroAinda não há avaliações
- Lista9 de Exercícios de Sinais e Sistemas Lineares - Chico Mota UFRNDocumento2 páginasLista9 de Exercícios de Sinais e Sistemas Lineares - Chico Mota UFRNVictor KailloAinda não há avaliações
- 02 Laplace PDFDocumento27 páginas02 Laplace PDFNey Jr.Ainda não há avaliações
- KL 1Documento5 páginasKL 1David de Almeida FiorilloAinda não há avaliações
- Formulários de Consulta - Transformada de Laplace - Ckt5-Tab1Documento2 páginasFormulários de Consulta - Transformada de Laplace - Ckt5-Tab1AntonioAinda não há avaliações
- Lista - 1 - Transformada de Laplace e Sistemas LinearesDocumento6 páginasLista - 1 - Transformada de Laplace e Sistemas Lineareslorentz franklinAinda não há avaliações
- 2021 Ici 1S 04Documento4 páginas2021 Ici 1S 04Matheus IsoldiAinda não há avaliações
- Exercicios Fourier 2022-2023Documento6 páginasExercicios Fourier 2022-2023João EstevesAinda não há avaliações
- Transformada de LaplaceDocumento14 páginasTransformada de LaplaceManuelMendesAinda não há avaliações
- Exercicios 09Documento5 páginasExercicios 09matheuslisarteAinda não há avaliações
- EEL7052 Prova1Documento2 páginasEEL7052 Prova1Gabriel GoulartAinda não há avaliações
- Lista - 2 - 2023-2 (PrinCom Turma 02)Documento3 páginasLista - 2 - 2023-2 (PrinCom Turma 02)Maria Luíza Vasconcelos do NascimentoAinda não há avaliações
- 03 Funcao DegrauDocumento19 páginas03 Funcao DegrauThiago DantasAinda não há avaliações
- Transformada de Laplace 0Documento44 páginasTransformada de Laplace 0Alexandre AraujoAinda não há avaliações
- Transformada de LaplaceDocumento36 páginasTransformada de LaplaceSergio FernandesAinda não há avaliações
- DSL Aula 4Documento29 páginasDSL Aula 4Mariana MoreiraAinda não há avaliações
- Controle Continuo 1 PDFDocumento18 páginasControle Continuo 1 PDFJeremias Ribeiro100% (1)
- Aula de Exercicios1Documento9 páginasAula de Exercicios1Leticia AlvesAinda não há avaliações
- Apostila - Analise de Sistemas LinearesDocumento46 páginasApostila - Analise de Sistemas LinearesMendel Tavares PassosAinda não há avaliações
- Funcao VetorialDocumento72 páginasFuncao VetorialCreeper Droid20Ainda não há avaliações
- 02 Transformada de Laplace Formulas+PropriedadesDocumento7 páginas02 Transformada de Laplace Formulas+PropriedadesDavi Pina Barros100% (1)
- Lista2 TransformadaFourierDocumento5 páginasLista2 TransformadaFourierjoaquimgoatAinda não há avaliações
- Práticas - Controle de Processos 03Documento2 páginasPráticas - Controle de Processos 03Alessandro JesusAinda não há avaliações
- Nota de Aula - Transf LaplaceDocumento19 páginasNota de Aula - Transf LaplaceCicero MelloAinda não há avaliações
- Teoria de Controle ModernoDocumento231 páginasTeoria de Controle ModernoValéria Lima Antônio FilhoAinda não há avaliações
- Transformada de LaplaceDocumento6 páginasTransformada de Laplacetamires.bojjisAinda não há avaliações
- Aula 11Documento23 páginasAula 11leonelAinda não há avaliações
- Lista 3 - MmaDocumento2 páginasLista 3 - MmaRenan Ramos de MoraisAinda não há avaliações
- Roteiro CAI 2011-12 TEDocumento31 páginasRoteiro CAI 2011-12 TEJoão SilvaAinda não há avaliações
- Aula 21Documento69 páginasAula 21Lucas .kAinda não há avaliações
- Lista 3 PDFDocumento3 páginasLista 3 PDF糞 Viny FerrazAinda não há avaliações
- Transform Ad Adela PlaceDocumento3 páginasTransform Ad Adela PlaceTavimnunesAinda não há avaliações
- Controle de Processos - Aula 2 - Versão 3Documento26 páginasControle de Processos - Aula 2 - Versão 3Jean Sarmento FerrazAinda não há avaliações
- V14a13 Regra Da Cadeia para Derivada FracionariaDocumento13 páginasV14a13 Regra Da Cadeia para Derivada FracionariaFernando SilvaAinda não há avaliações
- 1a Lista - Lista Transformada de LaplaceDocumento3 páginas1a Lista - Lista Transformada de LaplaceMatheus garciaAinda não há avaliações
- Exercício de Fixação ACPDocumento9 páginasExercício de Fixação ACPjessicaAinda não há avaliações
- 1 Transf LaplaceDocumento9 páginas1 Transf LaplaceDenise PereiraAinda não há avaliações
- Erro em Regime PermanenteDocumento13 páginasErro em Regime PermanenteRaphael NevesAinda não há avaliações
- 2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFDocumento6 páginas2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFLuiz Cezar WanderleyAinda não há avaliações
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 páginas5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 06Documento11 páginasENG-10933 - Controle de Processos - Aula 06Alessandro JesusAinda não há avaliações
- Ficha 1 Funcoes VectoriaisDocumento7 páginasFicha 1 Funcoes VectoriaisJoana NoitesAinda não há avaliações
- Lista 2 - 2018Documento5 páginasLista 2 - 2018Alessandro JesusAinda não há avaliações
- Aula1 - Funções Periódicas PDFDocumento5 páginasAula1 - Funções Periódicas PDFFilipe Silva100% (1)
- ENG-10933 - Controle de Processos - Aula 05Documento12 páginasENG-10933 - Controle de Processos - Aula 05Alessandro JesusAinda não há avaliações
- L2 Transformada de LaplaceDocumento1 páginaL2 Transformada de LaplaceGabrielly ReclaAinda não há avaliações
- Lista 2 - 2018Documento5 páginasLista 2 - 2018Alessandro JesusAinda não há avaliações
- Práticas - Controle de Processos 02Documento5 páginasPráticas - Controle de Processos 02Alessandro JesusAinda não há avaliações
- Práticas - Controle de Processos 03Documento2 páginasPráticas - Controle de Processos 03Alessandro JesusAinda não há avaliações
- Lista 5 - 2018Documento2 páginasLista 5 - 2018Alessandro JesusAinda não há avaliações
- Práticas - Controle de Processos 04Documento2 páginasPráticas - Controle de Processos 04Alessandro JesusAinda não há avaliações
- ATIVIDADSDocumento3 páginasATIVIDADSAlessandro JesusAinda não há avaliações
- Lista 1Documento2 páginasLista 1Alessandro JesusAinda não há avaliações
- Práticas - Controle de Processos 01Documento3 páginasPráticas - Controle de Processos 01Alessandro JesusAinda não há avaliações
- Lista 4 - 2018Documento1 páginaLista 4 - 2018Alessandro JesusAinda não há avaliações
- Ficha de Avaliação Da AprendizagemDocumento6 páginasFicha de Avaliação Da AprendizagemAlessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 02Documento15 páginasENG-10933 - Controle de Processos - Aula 02Alessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 04Documento20 páginasENG-10933 - Controle de Processos - Aula 04Alessandro JesusAinda não há avaliações
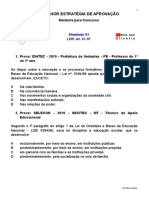
- Simulado LDB - Art. 01 - 07.Documento6 páginasSimulado LDB - Art. 01 - 07.Alessandro Jesus0% (1)
- ENG-10933 - Controle de Processos - Aula 09Documento9 páginasENG-10933 - Controle de Processos - Aula 09Alessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 06Documento11 páginasENG-10933 - Controle de Processos - Aula 06Alessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 05Documento12 páginasENG-10933 - Controle de Processos - Aula 05Alessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 07Documento5 páginasENG-10933 - Controle de Processos - Aula 07Alessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 03Documento19 páginasENG-10933 - Controle de Processos - Aula 03Alessandro JesusAinda não há avaliações
- TecnicoeletrotecnicacaboDocumento13 páginasTecnicoeletrotecnicacaboAlessandro JesusAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 01Documento20 páginasENG-10933 - Controle de Processos - Aula 01Alessandro JesusAinda não há avaliações
- Planejamento G5B 22 À 26.11Documento7 páginasPlanejamento G5B 22 À 26.11Alessandro JesusAinda não há avaliações
- Ard and Soft SkillsDocumento20 páginasArd and Soft SkillsAlessandro JesusAinda não há avaliações
- Lidando Com A Ansiedade e Desânimo - EbookDocumento27 páginasLidando Com A Ansiedade e Desânimo - EbookAnastácia Fordes100% (2)
- GeografiaDocumento5 páginasGeografiaCastigo MafutaAinda não há avaliações
- As 4 Estações Do CasamentoDocumento6 páginasAs 4 Estações Do Casamentoteste te thumbsAinda não há avaliações
- Cap 12Documento8 páginasCap 12Guilherme FlorêncioAinda não há avaliações
- NBR NM 51 - Agregado Graúdo - Ensaio de Abrasão 'Los Ángeles'Documento13 páginasNBR NM 51 - Agregado Graúdo - Ensaio de Abrasão 'Los Ángeles'ADSON TENORIO FRANCAAinda não há avaliações
- Fluidos de CorteDocumento9 páginasFluidos de CorteDjambimba SucaAinda não há avaliações
- INVESTIMENTO A MULHERES E MENINAS NA CIÊNCIA (Geral e Específico) - FAPEAM - 2019 2023Documento12 páginasINVESTIMENTO A MULHERES E MENINAS NA CIÊNCIA (Geral e Específico) - FAPEAM - 2019 2023felipeguedes.fgAinda não há avaliações
- Corpo - TCFDocumento11 páginasCorpo - TCFPedroConradoAinda não há avaliações
- 1º Ano Apostila 6Documento34 páginas1º Ano Apostila 6LUCIANO LAUBEAinda não há avaliações
- Bella Andre - Os Sullivans 17 - Sinto Algo Por VocêDocumento174 páginasBella Andre - Os Sullivans 17 - Sinto Algo Por VocêAnna Rita Cortez100% (4)
- Lei Ordinária N° 17.928 - 2012Documento31 páginasLei Ordinária N° 17.928 - 2012Henrique RabeloAinda não há avaliações
- Laudo Médico 3Documento15 páginasLaudo Médico 3Junior HochscheidtAinda não há avaliações
- A Matemática Que Estabelece o Bitcoin PDFDocumento14 páginasA Matemática Que Estabelece o Bitcoin PDFAndersonAinda não há avaliações
- Ovelha em Portugues-1Documento19 páginasOvelha em Portugues-1Ana Flávia Lima100% (6)
- Catalogo Tecnico Geral Linter FiltrosDocumento55 páginasCatalogo Tecnico Geral Linter FiltrosGustavo BritoAinda não há avaliações
- Resolução Nº 074.2019 - Prerrogativas e Atribuições Dos Técnicos Industriais Com Habilitação em Eletrotécnica, Revoga A ResoDocumento5 páginasResolução Nº 074.2019 - Prerrogativas e Atribuições Dos Técnicos Industriais Com Habilitação em Eletrotécnica, Revoga A ResoFrancisco GuedesAinda não há avaliações
- Sant'anna, Denise Bernuzzi De. Transformações Do Corpo Controle de Si e Uso Dos PrazeresDocumento9 páginasSant'anna, Denise Bernuzzi De. Transformações Do Corpo Controle de Si e Uso Dos Prazeressilvio_machado_2100% (1)
- Energia-Solar-Fotovoltaica Trajano-Viana Parte 1Documento18 páginasEnergia-Solar-Fotovoltaica Trajano-Viana Parte 1Henrique BastosAinda não há avaliações
- Manual Esquadrejadeira Ff325Documento32 páginasManual Esquadrejadeira Ff325Raphael Salt pescasAinda não há avaliações
- Amputação Dos Membros LocomotoresDocumento4 páginasAmputação Dos Membros LocomotoresMichelle Mello100% (1)
- WorkStation - OrTHODocumento26 páginasWorkStation - OrTHOAkikoAinda não há avaliações
- Reflexões Sobre Os Aspectos Financeiros, Societários e Tributários Do Setor de Petróleo, Gás e BiocombustíveisDocumento419 páginasReflexões Sobre Os Aspectos Financeiros, Societários e Tributários Do Setor de Petróleo, Gás e BiocombustíveisEuclides DapaixaoAinda não há avaliações
- Cantinho Da IgualdadeDocumento28 páginasCantinho Da IgualdadeKarla ElenaAinda não há avaliações
- Relatório Da AuscultaçãoDocumento4 páginasRelatório Da AuscultaçãoJosemar PascoalAinda não há avaliações
- 1 - EnquadramentoDocumento58 páginas1 - EnquadramentoPatrícia BarrosAinda não há avaliações
- Práticas para A Sala de Aula e Book V2Documento124 páginasPráticas para A Sala de Aula e Book V2Registro psi100% (1)
- Manual EletronDocumento37 páginasManual EletronJanilson LopesAinda não há avaliações
- Manual - 9851Documento38 páginasManual - 9851rpragosa100% (1)
- Fichas Trabalho ComplementarDocumento66 páginasFichas Trabalho ComplementarAnabela CorreiaAinda não há avaliações
- EletroterapiaDocumento3 páginasEletroterapiarobertaAinda não há avaliações