Você também pode gostar
- Lista de exercícios de métodos de matemática aplicadaDocumento2 páginasLista de exercícios de métodos de matemática aplicadaRenan Ramos de MoraisAinda não há avaliações
- Transformada de LaplaceDocumento6 páginasTransformada de Laplacetamires.bojjisAinda não há avaliações
- Métodos Matemáticos - Transformada de LaplaceDocumento3 páginasMétodos Matemáticos - Transformada de LaplaceBrenoAinda não há avaliações
- Transformada de Laplace na Solução de EDOsDocumento4 páginasTransformada de Laplace na Solução de EDOsMatheus IsoldiAinda não há avaliações
- Aula 06 - Funções de R em RNDocumento13 páginasAula 06 - Funções de R em RNMessionAinda não há avaliações
- Soluções - Lista 1Documento2 páginasSoluções - Lista 1weslly darlanAinda não há avaliações
- Lista LaplaceDocumento2 páginasLista Laplacemarcella4idalyneAinda não há avaliações
- Física Matemática - Exercícios de LaplaceDocumento1 páginaFísica Matemática - Exercícios de LaplaceErica Aparecida SucupiraAinda não há avaliações
- Topologia de medidas de probabilidadeDocumento4 páginasTopologia de medidas de probabilidadeWalter Torres MontesAinda não há avaliações
- Aplicações de autovalores e autovetores em dinâmica de populações, circuitos elétricos e números de FibonacciDocumento3 páginasAplicações de autovalores e autovetores em dinâmica de populações, circuitos elétricos e números de FibonaccirilmatematicoAinda não há avaliações
- 2014-15 Teste1 Enunciado Com ForDocumento1 página2014-15 Teste1 Enunciado Com ForprodbydandiAinda não há avaliações
- Transformada de LaplaceDocumento37 páginasTransformada de LaplaceJeferson BritoAinda não há avaliações
- Provas Cdi3Documento21 páginasProvas Cdi3Maria SebastiãoAinda não há avaliações
- Reginaldo LaplaceDocumento119 páginasReginaldo LaplaceMauricio CalheiroAinda não há avaliações
- EAC0356 - Lista - 1 GabaritoDocumento3 páginasEAC0356 - Lista - 1 GabaritoJoao Carlos Pacheco silvaAinda não há avaliações
- Análise Matemática III - Exame NormalDocumento7 páginasAnálise Matemática III - Exame NormalAbrão AntónioAinda não há avaliações
- Curvas parametrizadas e limites de funções vetoriaisDocumento2 páginasCurvas parametrizadas e limites de funções vetoriaisweslly darlanAinda não há avaliações
- 3raProvaMAT137T12022 IIDocumento5 páginas3raProvaMAT137T12022 IIwalterhvAinda não há avaliações
- Lista 3 - Cálculo IIIDocumento8 páginasLista 3 - Cálculo IIIAlex AlvesAinda não há avaliações
- Lista 1 de Geometria Diferencial 1 com exercícios sobre curvas no plano e espaçoDocumento7 páginasLista 1 de Geometria Diferencial 1 com exercícios sobre curvas no plano e espaçoLucas Lisboa LeãoAinda não há avaliações
- Aula 25Documento11 páginasAula 25Adriano MoschiniAinda não há avaliações
- Operadores lineares e autovaloresDocumento3 páginasOperadores lineares e autovaloresAdrian Carsi PereiraAinda não há avaliações
- Aula 1 - Funções Com Valores VetoriaisDocumento13 páginasAula 1 - Funções Com Valores VetoriaisMarkus DämonAinda não há avaliações
- Af2 12er CorDocumento3 páginasAf2 12er CorContaAinda não há avaliações
- Equações Diferenciais - Resolução de ProblemasDocumento4 páginasEquações Diferenciais - Resolução de ProblemasJorge BenderAinda não há avaliações
- Resolucao Lista3 FGM TCLDocumento3 páginasResolucao Lista3 FGM TCLTainá CabalheiroAinda não há avaliações
- Af2 10er CorDocumento3 páginasAf2 10er CorContaAinda não há avaliações
- Formulários de Consulta - Série de Fourier - Ckt6-TabDocumento2 páginasFormulários de Consulta - Série de Fourier - Ckt6-TabAntonioAinda não há avaliações
- Modelos de Processos IndustriaisDocumento34 páginasModelos de Processos IndustriaisJanaina MaiaAinda não há avaliações
- Aula 02Documento25 páginasAula 02Kmi70 Krneir0Ainda não há avaliações
- Métodos Matemáticos - Transformada de LaplaceDocumento16 páginasMétodos Matemáticos - Transformada de LaplaceVitor Henrique MeloAinda não há avaliações
- Constante de Euler-MascheroniDocumento4 páginasConstante de Euler-MascheroniTais C. Bertini KatuAinda não há avaliações
- ACFrOgCjouCMnUUkqmdZagsv5oLhUXI46P - YeaBU7 - fASbNlyKARs ZJ6vfiy40M0kOEhvFZ X6AF9DbOt0 - H4i4 ComOFkqwa3hEzektRTrK3mzIm72NHJafFhNezCr6jKv 1 2zDpWlg5CFcGD PDFDocumento2 páginasACFrOgCjouCMnUUkqmdZagsv5oLhUXI46P - YeaBU7 - fASbNlyKARs ZJ6vfiy40M0kOEhvFZ X6AF9DbOt0 - H4i4 ComOFkqwa3hEzektRTrK3mzIm72NHJafFhNezCr6jKv 1 2zDpWlg5CFcGD PDFEMMANOEL ANTONIO ALMEIDA CAVALCANTIAinda não há avaliações
- Cálculo 3: integrais de campo vetorial e curvas paramétricasDocumento3 páginasCálculo 3: integrais de campo vetorial e curvas paramétricasCamila TeixeiraAinda não há avaliações
- Modelos dinâmicos discretosDocumento3 páginasModelos dinâmicos discretosCamila Yumi YachiroAinda não há avaliações
- Mat1154 33D 23.11.20Documento14 páginasMat1154 33D 23.11.20PCP AulasAinda não há avaliações
- Af2 11er CorDocumento4 páginasAf2 11er CorContaAinda não há avaliações
- Harmônicos esféricos: solução da equação de Laplace em coordenadas esféricasDocumento7 páginasHarmônicos esféricos: solução da equação de Laplace em coordenadas esféricasMatheus GuimaraesAinda não há avaliações
- Polinomios LegendreDocumento16 páginasPolinomios LegendreMatheus GuimaraesAinda não há avaliações
- Curvas PlanasDocumento452 páginasCurvas PlanasHamilton C RodriguesAinda não há avaliações
- Frensel K, Delgado J - Notas de Geometria Diferencial Cap1Documento37 páginasFrensel K, Delgado J - Notas de Geometria Diferencial Cap1Edson GagliardiAinda não há avaliações
- Novoficheiro 1Documento2 páginasNovoficheiro 1Beatriz CostaAinda não há avaliações
- Lista 1 Da Unidade 1Documento4 páginasLista 1 Da Unidade 1Israel FelixAinda não há avaliações
- Af2 12en CorDocumento3 páginasAf2 12en CorContaAinda não há avaliações
- Lista 3Documento2 páginasLista 3Sofia BernardoniAinda não há avaliações
- Teoria de Controle EM81Documento27 páginasTeoria de Controle EM81Ney Jr.Ainda não há avaliações
- Álgebra Linear: Lista de Exercícios sobre Transformações Lineares e AutovaloresDocumento3 páginasÁlgebra Linear: Lista de Exercícios sobre Transformações Lineares e AutovaloresJoão Victor Oliveira RodriguesAinda não há avaliações
- Af2 11en CorDocumento3 páginasAf2 11en CorContaAinda não há avaliações
- Polinomos Associados LegendreDocumento10 páginasPolinomos Associados LegendreMatheus GuimaraesAinda não há avaliações
- Solução de EDP por métodos numéricosDocumento2 páginasSolução de EDP por métodos numéricosMarlon MesquitaAinda não há avaliações
- Curso de Eletrodinâmica Clássica I - 2005.1Documento3 páginasCurso de Eletrodinâmica Clássica I - 2005.1Henrique Patriota AlvesAinda não há avaliações
- Aula 9 Transformada de LaplaceDocumento54 páginasAula 9 Transformada de LaplaceJoyceCrisAinda não há avaliações
- Lista de Exercícios de Transformada de LaplaceDocumento2 páginasLista de Exercícios de Transformada de LaplaceRenan Ramos de MoraisAinda não há avaliações
- Polinômios de Legendre PDFDocumento6 páginasPolinômios de Legendre PDFDstv Jhonis CoelhoAinda não há avaliações
- Pêndulo Simples Movimento PeriódicoDocumento2 páginasPêndulo Simples Movimento PeriódicoGrasielle SantanaAinda não há avaliações
- Aula 6Documento7 páginasAula 6Ricardo RibeiroAinda não há avaliações
- A1 RevisoMatematica LaplaceDocumento21 páginasA1 RevisoMatematica LaplacebrineniziiziAinda não há avaliações
- Dicas e Respostas Lista 1 Edo2Documento8 páginasDicas e Respostas Lista 1 Edo2Märkíito TiAu100% (2)
- Apostila de Circuitos DigitaisDocumento345 páginasApostila de Circuitos DigitaisNayure MatiasAinda não há avaliações
- Algoritmos e Estruturas de DadosDocumento48 páginasAlgoritmos e Estruturas de DadosfpreisAinda não há avaliações
- Filtros RL RC e RLCDocumento6 páginasFiltros RL RC e RLCfpreisAinda não há avaliações
- Controlabilidade e Observabilidade em Formas de JordanDocumento25 páginasControlabilidade e Observabilidade em Formas de JordanfpreisAinda não há avaliações
- Livro Unico PDFDocumento220 páginasLivro Unico PDFEric Morais de Oliveira100% (1)
- Realimentação de Estados SISODocumento45 páginasRealimentação de Estados SISOfpreisAinda não há avaliações
- Nuvi 3597 OM PTDocumento24 páginasNuvi 3597 OM PTfpreisAinda não há avaliações
- ANALISE E PROCESSAMENTO DE SINAIS NotasDocumento130 páginasANALISE E PROCESSAMENTO DE SINAIS NotasfpreisAinda não há avaliações
- Aula 1 OKDocumento16 páginasAula 1 OKfpreisAinda não há avaliações
- Fonografia Forense: Análise de Áudio para PeríciaDocumento24 páginasFonografia Forense: Análise de Áudio para PeríciafpreisAinda não há avaliações
- A Fonetica Forense Na Producao de ProvaDocumento27 páginasA Fonetica Forense Na Producao de ProvafpreisAinda não há avaliações
- CC-codificacao DadosDocumento10 páginasCC-codificacao DadosfpreisAinda não há avaliações
- Alocação de Autovalores em Sistemas MIMO usando Realimentação de EstadoDocumento30 páginasAlocação de Autovalores em Sistemas MIMO usando Realimentação de EstadofpreisAinda não há avaliações
- Solução em Espaço de Estado para Sistemas LVTDocumento34 páginasSolução em Espaço de Estado para Sistemas LVTfpreisAinda não há avaliações
- Estabilidade InternaDocumento31 páginasEstabilidade InternafpreisAinda não há avaliações
- Estabilidade entrada-saída sistemas LITDocumento24 páginasEstabilidade entrada-saída sistemas LITfpreisAinda não há avaliações
- Algebra Linear: OrtonormalizaçãoDocumento38 páginasAlgebra Linear: OrtonormalizaçãofpreisAinda não há avaliações
- Observabilidade, Decomposi C Ao Can OnicaDocumento36 páginasObservabilidade, Decomposi C Ao Can OnicafpreisAinda não há avaliações
- Matrizes e Sistemas LinearesDocumento43 páginasMatrizes e Sistemas LinearesfpreisAinda não há avaliações
- Aula5 TSLDocumento37 páginasAula5 TSLfpreisAinda não há avaliações
- Teoria Sistemas LinearesDocumento18 páginasTeoria Sistemas LinearesfpreisAinda não há avaliações
- Equações diferenciais e sistemas linearesDocumento31 páginasEquações diferenciais e sistemas linearesfpreisAinda não há avaliações
- A evolução dos microprocessadores e suas aplicaçõesDocumento24 páginasA evolução dos microprocessadores e suas aplicaçõesfpreisAinda não há avaliações
- Algebra Linear: Teorema de Cayley-Hamilton e Funções de Matriz QuadradaDocumento23 páginasAlgebra Linear: Teorema de Cayley-Hamilton e Funções de Matriz QuadradafpreisAinda não há avaliações
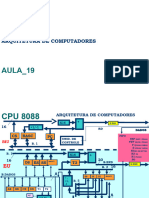
- Arquitetura e registradores do microprocessador 8086Documento41 páginasArquitetura e registradores do microprocessador 8086fpreisAinda não há avaliações
- Introdução às propriedades e características das antenas em anelDocumento16 páginasIntrodução às propriedades e características das antenas em anelfpreisAinda não há avaliações
- Estabilidade para Sistemas LVT: Estabilidade de Sistemas Variante No Tempo Estabilidade Da Resposta 'A Entrada NulaDocumento13 páginasEstabilidade para Sistemas LVT: Estabilidade de Sistemas Variante No Tempo Estabilidade Da Resposta 'A Entrada NulafpreisAinda não há avaliações
- Micros 03Documento14 páginasMicros 03fpreisAinda não há avaliações
- Micros 02Documento53 páginasMicros 02fpreisAinda não há avaliações
- Micros 04Documento14 páginasMicros 04fpreisAinda não há avaliações
- Conteúdo Programático e Bibliografia STT - 2022-2023Documento109 páginasConteúdo Programático e Bibliografia STT - 2022-2023Raphael RaalhoAinda não há avaliações
- Plano de Ensino Direção IDocumento4 páginasPlano de Ensino Direção ISuelen Cristina Nino FernandesAinda não há avaliações
- Aula 3 - Atendimento - Telefonico - em - Serviços - de - SaúdeDocumento17 páginasAula 3 - Atendimento - Telefonico - em - Serviços - de - SaúdeGraciete PaixãoAinda não há avaliações
- Inversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Documento2 páginasInversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Luana PereiraAinda não há avaliações
- APOL1 - Criptografia e CriptoanáliseDocumento22 páginasAPOL1 - Criptografia e CriptoanáliseSandro Roberto de SouzaAinda não há avaliações
- Antonio 2162969 10-02-22Documento1 páginaAntonio 2162969 10-02-22Leandro A LimaAinda não há avaliações
- Cunha, E.R. - Carvalho, R.M. - Tavares, L.M.M. - Simulação Avançada de Britadores de Impacto de Eixo VerticalDocumento10 páginasCunha, E.R. - Carvalho, R.M. - Tavares, L.M.M. - Simulação Avançada de Britadores de Impacto de Eixo VerticalGildoAinda não há avaliações
- Anexo 01 LGPD Ano 2023 Pré VestibularDocumento2 páginasAnexo 01 LGPD Ano 2023 Pré VestibularMarden Dias FerreiraAinda não há avaliações
- Como Instalar e Licenciar o Microsoft Office 2019Documento5 páginasComo Instalar e Licenciar o Microsoft Office 2019maiquelviniciusAinda não há avaliações
- Manutenção RTGDocumento12 páginasManutenção RTGDeborah LeiteAinda não há avaliações
- Aula - Ac - 19 - GravDocumento20 páginasAula - Ac - 19 - GravCharles ChavesAinda não há avaliações
- Simulado 1 - INSSDocumento18 páginasSimulado 1 - INSSAnderson BragaAinda não há avaliações
- Mídia Kit - Rádio Atlântida - Junho 2023Documento113 páginasMídia Kit - Rádio Atlântida - Junho 2023Rafaela AssunçãoAinda não há avaliações
- Aula 5Documento5 páginasAula 5Thawanny de CarvalhoAinda não há avaliações
- Medidas Do Papel - A0, A1, A2, A3, A4, A5Documento1 páginaMedidas Do Papel - A0, A1, A2, A3, A4, A5Lucas Barros de Andrade40% (5)
- Normalização dos Materiais de ConstruçãoDocumento42 páginasNormalização dos Materiais de ConstruçãoSilmayko SilvaAinda não há avaliações
- Manual Fortes Web Modulo PessoalDocumento94 páginasManual Fortes Web Modulo PessoalEverton Muller BelarminoAinda não há avaliações
- Aplicação ADO.NET no SIGEMUDocumento15 páginasAplicação ADO.NET no SIGEMUamandiosousaAinda não há avaliações
- Projeto de máquinas e materiaisDocumento7 páginasProjeto de máquinas e materiaisrogersampaiocosta-1Ainda não há avaliações
- Pc78us-8 (KPBM0454304)Documento1.015 páginasPc78us-8 (KPBM0454304)julianoAinda não há avaliações
- Introdução A Cinemática Dos FluidosDocumento32 páginasIntrodução A Cinemática Dos FluidosLuciano SouzaAinda não há avaliações
- Ficha Reforço Nº6 Monomios PolinomiosDocumento7 páginasFicha Reforço Nº6 Monomios PolinomiosTeresa CoimbraAinda não há avaliações
- Um Estudo Sobre Fotografia Abstrata: Geraldo de BarrosDocumento64 páginasUm Estudo Sobre Fotografia Abstrata: Geraldo de BarrosCarolina MunizAinda não há avaliações
- Apostila - THR12 Parte 1 - Ka Solution PDFDocumento506 páginasApostila - THR12 Parte 1 - Ka Solution PDFRoberto TobioAinda não há avaliações
- Guia Do PAVE 2023 Rev01 1Documento12 páginasGuia Do PAVE 2023 Rev01 1Wesley Matheus HolzAinda não há avaliações
- GabrielDocumento1 páginaGabrielGabriel SouzaAinda não há avaliações
- FT Bateria 7 Amp 12V DIAMEC PTDocumento2 páginasFT Bateria 7 Amp 12V DIAMEC PTjoaoqueiroz.monthauseAinda não há avaliações
- Procedimento de EnvioDocumento2 páginasProcedimento de EnvioAlexandre CostaAinda não há avaliações
- 01-Carta Convite Klabin ZCN 13783Documento3 páginas01-Carta Convite Klabin ZCN 13783Grac ServiçosAinda não há avaliações
- Defesa - Dissertação Final - Marcos Accioly - EDUCIMATDocumento156 páginasDefesa - Dissertação Final - Marcos Accioly - EDUCIMATBruno PortoAinda não há avaliações