Você também pode gostar
- Proced Criar NOVA CONTA No FusionSolar MONODocumento4 páginasProced Criar NOVA CONTA No FusionSolar MONOCharles CardosoAinda não há avaliações
- 1 SMDocumento14 páginas1 SMCarla PimentelAinda não há avaliações
- Função Linear 1Documento17 páginasFunção Linear 1Alvim AlbertoAinda não há avaliações
- Revisao 2 VE - Cálculo IADocumento10 páginasRevisao 2 VE - Cálculo IAGabriel PicaoAinda não há avaliações
- Aula 1 Clculo IDocumento8 páginasAula 1 Clculo IAzark KingAinda não há avaliações
- SÉRIES DE FOURIER (Beamer)Documento18 páginasSÉRIES DE FOURIER (Beamer)Sávio SantanaAinda não há avaliações
- Apostila Matematica 3 ITADocumento67 páginasApostila Matematica 3 ITAeduardo marcaAinda não há avaliações
- Apostila ITAIME Eleva Vol.3Documento68 páginasApostila ITAIME Eleva Vol.3voveba6550Ainda não há avaliações
- Algebra LinearDocumento32 páginasAlgebra LinearfpreisAinda não há avaliações
- Cálculo Funções de Uma e Várias Variáveis Pedro A. Morettin, Samuel Hazzan, Wilton de O. Bussab.Documento8 páginasCálculo Funções de Uma e Várias Variáveis Pedro A. Morettin, Samuel Hazzan, Wilton de O. Bussab.LIDIA PUGLIESSAAinda não há avaliações
- Autovalores e Autovetores É Uma Transformação EspecialDocumento10 páginasAutovalores e Autovetores É Uma Transformação EspecialCamila AmaralAinda não há avaliações
- 7-CN Material 04 AutovaloresAutovetoresDocumento17 páginas7-CN Material 04 AutovaloresAutovetoresRodolfo Oliveira de SouzaAinda não há avaliações
- Resolução 624 Funo - ExponencialDocumento9 páginasResolução 624 Funo - ExponencialFernando FerreiraAinda não há avaliações
- Gab Ativ6 LinDocumento7 páginasGab Ativ6 LinYasmim BrasilAinda não há avaliações
- Análise Matemática II - Fórmula de TaylorDocumento15 páginasAnálise Matemática II - Fórmula de TaylorHélio Januário SimangoAinda não há avaliações
- Live Calculo Diferencial 16 05 2022Documento69 páginasLive Calculo Diferencial 16 05 2022Cristopher Rodrigues VieiraAinda não há avaliações
- Matemática - 1º Ano Eja - Semana 1Documento5 páginasMatemática - 1º Ano Eja - Semana 1barbara.c.gomesAinda não há avaliações
- Aula 26Documento5 páginasAula 26Adriano MoschiniAinda não há avaliações
- Ime-Ita Apostila Matematica Vol 3Documento66 páginasIme-Ita Apostila Matematica Vol 3Emerson NascimentoAinda não há avaliações
- Extramuros 2022-2 Gabarito FinalDocumento8 páginasExtramuros 2022-2 Gabarito FinalDouglas SilvaAinda não há avaliações
- Equacoes e Inequacoes Exponenciais e LogaritmicasDocumento10 páginasEquacoes e Inequacoes Exponenciais e LogaritmicasAbner Foia100% (6)
- Sistemas Dinamicos e Ensaios PraticosDocumento5 páginasSistemas Dinamicos e Ensaios PraticosVinícius Moreira SouzaAinda não há avaliações
- Integral IndefinidaDocumento24 páginasIntegral IndefinidaAlexsandro SantosAinda não há avaliações
- Aula 03 Funo Polinomial Do Primeiro Grau IDocumento16 páginasAula 03 Funo Polinomial Do Primeiro Grau IPaulo SergioAinda não há avaliações
- EDB Aula 04Documento80 páginasEDB Aula 04Carlos MattielloAinda não há avaliações
- Notas de Aula - Matemática Aplicada A EngenhariaDocumento10 páginasNotas de Aula - Matemática Aplicada A EngenhariaDriNay13Ainda não há avaliações
- Projeto TeóricaDocumento28 páginasProjeto TeóricaLuis Carlos OliveiraAinda não há avaliações
- Lista 1Documento3 páginasLista 1Rony Wilson Quinaya MejiaAinda não há avaliações
- Aula 14 2023Documento49 páginasAula 14 2023Rafael InácioAinda não há avaliações
- Lista 1Documento5 páginasLista 1Nathan Nascimento SantosAinda não há avaliações
- Função Sem Primitiva PDFDocumento10 páginasFunção Sem Primitiva PDFfrancisco_araujo_22Ainda não há avaliações
- Dedução Da Equação Da Onda EsfericaDocumento11 páginasDedução Da Equação Da Onda Esfericapaulo.h100% (1)
- APOSTILAFUNCAODO1GRAUDocumento4 páginasAPOSTILAFUNCAODO1GRAUINPROC TECNOLOGIA B.R. INPROCAinda não há avaliações
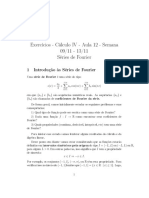
- Exercícios - Cálculo IV - Aula 12 - Semana 09/11 - 13/11 Séries de FourierDocumento6 páginasExercícios - Cálculo IV - Aula 12 - Semana 09/11 - 13/11 Séries de FourierTarcídioAntônioAinda não há avaliações
- Apostila Transformada de FourierDocumento42 páginasApostila Transformada de FourieretpeladoAinda não há avaliações
- AMI 2007-06-16 Teste Global e ResoluçãoDocumento5 páginasAMI 2007-06-16 Teste Global e ResoluçãoMundo CuriosoAinda não há avaliações
- PENSI - Apostila de Exercícios ITA-IME Vol 3Documento66 páginasPENSI - Apostila de Exercícios ITA-IME Vol 3Pedro Lucas Dutra BragaAinda não há avaliações
- Aula 1 e 2 - Limite e Continuidade de Funções.Documento9 páginasAula 1 e 2 - Limite e Continuidade de Funções.Paulo De Tarso FerreiraAinda não há avaliações
- Funcao Afim - Raiz, Coeficientes e Estudo Do SinalDocumento30 páginasFuncao Afim - Raiz, Coeficientes e Estudo Do SinalTelma Castro Silva0% (1)
- Mat I 2022 CalculoDocumento245 páginasMat I 2022 Calculoguga.teles15Ainda não há avaliações
- Geometria Analitica e Vetores IDocumento8 páginasGeometria Analitica e Vetores IPaulo Luis SempeAinda não há avaliações
- Teorema Espectral - Resumão Completo, Exercícios Passo A Passo e VideoaulasDocumento10 páginasTeorema Espectral - Resumão Completo, Exercícios Passo A Passo e VideoaulastennysonbaumAinda não há avaliações
- Algebra 3Documento8 páginasAlgebra 3lucasAinda não há avaliações
- Modulo 12Documento9 páginasModulo 12Daniel marquesAinda não há avaliações
- Funcoes PDFDocumento15 páginasFuncoes PDFTamaradosAnjosAinda não há avaliações
- Al - L5 - SolDocumento5 páginasAl - L5 - SolSeza SuritaAinda não há avaliações
- Limites - Ideia IntuitivaDocumento11 páginasLimites - Ideia IntuitivaMARIANA JOYCE DOS SANTOS NASCIMENTOAinda não há avaliações
- 2014-15 Teste1 Enunciado Com ForDocumento1 página2014-15 Teste1 Enunciado Com ForprodbydandiAinda não há avaliações
- Mat Ensino 03 - Funcao Expo e Log 2021-2BDocumento25 páginasMat Ensino 03 - Funcao Expo e Log 2021-2BDejairAinda não há avaliações
- Fundamentos de MatematicaDocumento7 páginasFundamentos de MatematicaAlberto da CruzAinda não há avaliações
- Ex Recorrencia CorDocumento5 páginasEx Recorrencia CorBeneditoAinda não há avaliações
- 14 Esp RDocumento10 páginas14 Esp RGonkas FrtAinda não há avaliações
- Aula 5 - Reações ReversíveisDocumento9 páginasAula 5 - Reações ReversíveisEmílio MercuriAinda não há avaliações
- Aula03 Funes Algbricas IDocumento7 páginasAula03 Funes Algbricas Ireidosgnomos97Ainda não há avaliações
- Aula 3 02092021Documento16 páginasAula 3 02092021thaynabarretoAinda não há avaliações
- Texto Aula 3 2023 1Documento8 páginasTexto Aula 3 2023 1Pedro WellingtomAinda não há avaliações
- Roteiro 1 - FunçõesDocumento14 páginasRoteiro 1 - Funçõescesar767Ainda não há avaliações
- CADERNO04Documento24 páginasCADERNO04RAQUEL PEREIRA DA SILVAAinda não há avaliações
- Lista 3 Medida e Integração RemovedDocumento7 páginasLista 3 Medida e Integração Removedjoel.marquesdxAinda não há avaliações
- Aula 35 - C Lculo 2Documento14 páginasAula 35 - C Lculo 2Adriano MoschiniAinda não há avaliações
- Cronograma de Cálculo III - 2017-1Documento4 páginasCronograma de Cálculo III - 2017-1Adriano MoschiniAinda não há avaliações
- Ementas 1Documento52 páginasEmentas 1Adriano MoschiniAinda não há avaliações
- ErrataCalculoIII Volume1 Modulo1Documento2 páginasErrataCalculoIII Volume1 Modulo1Adriano MoschiniAinda não há avaliações
- Aula 04Documento12 páginasAula 04Adriano MoschiniAinda não há avaliações
- Aula 21Documento4 páginasAula 21Adriano MoschiniAinda não há avaliações
- 2019 2ElisandraFreitasDocumento80 páginas2019 2ElisandraFreitasAdriano MoschiniAinda não há avaliações
- Agora Não Necessitamos de Medidas Adicionais, Diz Saúde Sobre Carnaval em SPDocumento20 páginasAgora Não Necessitamos de Medidas Adicionais, Diz Saúde Sobre Carnaval em SPAdriano MoschiniAinda não há avaliações
- Jornal Da Serra: Serrano É Um Dos Dois Capixabas Com Bolsa No Insper em São PauloDocumento10 páginasJornal Da Serra: Serrano É Um Dos Dois Capixabas Com Bolsa No Insper em São PauloAdriano MoschiniAinda não há avaliações
- UntitledDocumento246 páginasUntitledAdriano MoschiniAinda não há avaliações
- Lira Defende Prioridade Na Agenda de Reformas E O Auxílio EmergencialDocumento12 páginasLira Defende Prioridade Na Agenda de Reformas E O Auxílio EmergencialAdriano MoschiniAinda não há avaliações
- 1 4956231473188307436Documento10 páginas1 4956231473188307436Adriano MoschiniAinda não há avaliações
- Zanon Recebe Prefeito de Marilândia Gutim Astori: Rede DiárioDocumento10 páginasZanon Recebe Prefeito de Marilândia Gutim Astori: Rede DiárioAdriano MoschiniAinda não há avaliações
- UntitledDocumento338 páginasUntitledAdriano MoschiniAinda não há avaliações
- A B C D: Toque Na Letra E Diga O Nome Dela Toque Na Letra E Diga Uma Palavra Que Comece Com ElaDocumento7 páginasA B C D: Toque Na Letra E Diga O Nome Dela Toque Na Letra E Diga Uma Palavra Que Comece Com ElaAdriano MoschiniAinda não há avaliações
- UntitledDocumento558 páginasUntitledAdriano MoschiniAinda não há avaliações
- Todos Os Municípios de Al Cancelam O Carnaval Por Conta Da Covid-19Documento12 páginasTodos Os Municípios de Al Cancelam O Carnaval Por Conta Da Covid-19Adriano MoschiniAinda não há avaliações
- Ortfólio: CarnavalDocumento6 páginasOrtfólio: CarnavalAdriano MoschiniAinda não há avaliações
- Escola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraDocumento6 páginasEscola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraAdriano MoschiniAinda não há avaliações
- Estado Será Reclassificado Amanhã Expectativa É de FlexibilizaçãoDocumento20 páginasEstado Será Reclassificado Amanhã Expectativa É de FlexibilizaçãoAdriano MoschiniAinda não há avaliações
- Z ? Contorne ADocumento26 páginasZ ? Contorne AAdriano MoschiniAinda não há avaliações
- L Abirinto Colorir L Igue: Curiosidades Máscara Caça Pal AvrasDocumento7 páginasL Abirinto Colorir L Igue: Curiosidades Máscara Caça Pal AvrasAdriano MoschiniAinda não há avaliações
- 1 4956231473188307433Documento9 páginas1 4956231473188307433Adriano MoschiniAinda não há avaliações
- Escola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraDocumento7 páginasEscola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraAdriano MoschiniAinda não há avaliações
- Quantos São? Par Ou Ímpar? Colorir Complete LabirintoDocumento6 páginasQuantos São? Par Ou Ímpar? Colorir Complete LabirintoAdriano MoschiniAinda não há avaliações
- 1 4985585633331249802Documento5 páginas1 4985585633331249802Adriano MoschiniAinda não há avaliações
- Escola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraDocumento7 páginasEscola "João Inácio Soares'': Secretaria Municipal de Educação de QuadraAdriano MoschiniAinda não há avaliações
- Colorir Labirinto Cruzadinha: Ligue 7 ErrosDocumento6 páginasColorir Labirinto Cruzadinha: Ligue 7 ErrosAdriano MoschiniAinda não há avaliações
- Escola "João Inácio Soares: Secretaria Municipal de Educação de QuadraDocumento5 páginasEscola "João Inácio Soares: Secretaria Municipal de Educação de QuadraAdriano MoschiniAinda não há avaliações
- Guia de Planejamento 2017 Guia de Planejamento 2017 Guia de Planejamento 2017Documento16 páginasGuia de Planejamento 2017 Guia de Planejamento 2017 Guia de Planejamento 2017Adriano MoschiniAinda não há avaliações
- Poemas - Pablo NerudaDocumento2 páginasPoemas - Pablo NerudaDenise SiqueiraAinda não há avaliações
- Classificacao Geral Vestibular UeaDocumento991 páginasClassificacao Geral Vestibular UeamartinselanildaAinda não há avaliações
- Equações DiferenciaisDocumento45 páginasEquações DiferenciaisDarkArkangel2Ainda não há avaliações
- Anatomia Do Esqueleto ApendicularDocumento45 páginasAnatomia Do Esqueleto ApendicularVanessa VitoriaAinda não há avaliações
- Trabalho de TGA - Handy, Fayol e FordDocumento9 páginasTrabalho de TGA - Handy, Fayol e FordMarcos Roberto RosaAinda não há avaliações
- EmpreenderismoDocumento16 páginasEmpreenderismoLúcia Silva Silva100% (1)
- DT266 Alicate Amperímetro DigitalDocumento4 páginasDT266 Alicate Amperímetro DigitaledgardhoAinda não há avaliações
- QuestionarioDocumento3 páginasQuestionarioDhandara LucymillaAinda não há avaliações
- Extensao Counitaria IDocumento17 páginasExtensao Counitaria Idércio nevesAinda não há avaliações
- Yago CastroDocumento21 páginasYago CastroYago CastroAinda não há avaliações
- Desenvolvimento Da Radiologia IntervencionistaDocumento3 páginasDesenvolvimento Da Radiologia IntervencionistaProf-Alexsandro FerreiraAinda não há avaliações
- Relatório de Levantamento MaterialDocumento2 páginasRelatório de Levantamento MaterialHeltonsubrg SystemAinda não há avaliações
- BOVINOCULTURADocumento85 páginasBOVINOCULTURAJuliana MouraAinda não há avaliações
- A Perdida Arte Da DatilografiaDocumento4 páginasA Perdida Arte Da DatilografiaPatricia GomesAinda não há avaliações
- Check List BPFDocumento11 páginasCheck List BPFcassilda_carvalho@hotmail.comAinda não há avaliações
- Guia de Identificação Das Pastagens Nativas Do Pantanal (2019)Documento223 páginasGuia de Identificação Das Pastagens Nativas Do Pantanal (2019)Andreia CostaAinda não há avaliações
- Endometriose 2021Documento16 páginasEndometriose 2021Nathalia Vasconcelos Barroso Todt AragãoAinda não há avaliações
- AutoP03158216425 PDFDocumento1 páginaAutoP03158216425 PDFwitalo taveiraAinda não há avaliações
- Óquio: Istema Etro ErroviárioDocumento96 páginasÓquio: Istema Etro ErroviárioJLAinda não há avaliações
- Aula 6 - Recursos CinesioterapêuticosDocumento9 páginasAula 6 - Recursos CinesioterapêuticosVeronica luz anselmoAinda não há avaliações
- Vasos de BarroDocumento5 páginasVasos de BarroDaniel Sipriano NetoAinda não há avaliações
- Patologia Das ConstruçõesDocumento2 páginasPatologia Das ConstruçõesAldenilo VieiraAinda não há avaliações
- 2017 - Producao Textual-6oAno - Etapa02 Fábulas, Apólogos, Contos Maravilhosos Prova e GabaritoDocumento8 páginas2017 - Producao Textual-6oAno - Etapa02 Fábulas, Apólogos, Contos Maravilhosos Prova e GabaritoRosimere BritoAinda não há avaliações
- Requisição de PessoalDocumento2 páginasRequisição de PessoalComa Bem RefeiçõesAinda não há avaliações
- Termodinâmica - 3Documento46 páginasTermodinâmica - 3moises20caAinda não há avaliações
- Guia Local v1810 - CE Crateus - 06-11-2018Documento22 páginasGuia Local v1810 - CE Crateus - 06-11-2018Marcelo ClaroAinda não há avaliações
- Cartilha FNS - Acesso A Recursos Da Saúde 2022Documento166 páginasCartilha FNS - Acesso A Recursos Da Saúde 2022vieiraianaAinda não há avaliações
- Ficha Rakan (ATUAL)Documento3 páginasFicha Rakan (ATUAL)Fiky ColdAinda não há avaliações
- Geometria ÁtomoDocumento4 páginasGeometria Átomoemarchesi2012Ainda não há avaliações