Você também pode gostar
- As Seis Lições - LivroDocumento21 páginasAs Seis Lições - LivroRonaldo AssisAinda não há avaliações
- Finanças Pessoais e InvestimentosDocumento17 páginasFinanças Pessoais e InvestimentosMiguelSalgadoAinda não há avaliações
- Resumos de Física e Química para 10o e 11o anosDocumento35 páginasResumos de Física e Química para 10o e 11o anosPanther xxx100% (1)
- A origem e características da filosofiaDocumento5 páginasA origem e características da filosofiaRafaelaAinda não há avaliações
- Softwares para TopografiaDocumento99 páginasSoftwares para TopografialauraAinda não há avaliações
- Acupuntura Estetica Modulo 1Documento38 páginasAcupuntura Estetica Modulo 1Claudio Solano100% (1)
- Chico Xavier - Pelo Espírito André Luiz - Mecanismos Da MediunidadeDocumento101 páginasChico Xavier - Pelo Espírito André Luiz - Mecanismos Da MediunidadeGbgu3Ainda não há avaliações
- Cinematica Do Ponto MaterialDocumento21 páginasCinematica Do Ponto MaterialJoaquim Simão100% (1)
- Orçamento Reparos Drive Yaskawa - OS 40.162Documento2 páginasOrçamento Reparos Drive Yaskawa - OS 40.162Marcelo JesusAinda não há avaliações
- O animal satisfeito dorme: alerta contra acomodação e estagnaçãoDocumento42 páginasO animal satisfeito dorme: alerta contra acomodação e estagnaçãoEmmy BortoletoAinda não há avaliações
- 1.1.3. Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média PDFDocumento7 páginas1.1.3. Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média PDFsarahhenryAinda não há avaliações
- Movimento, posição e velocidadeDocumento9 páginasMovimento, posição e velocidadeMaxim MarcuAinda não há avaliações
- 1.1.2. Posição em Coordenadas Cartesianas. Movimentos Retilíneos e Gráficos Posição-TempoDocumento10 páginas1.1.2. Posição em Coordenadas Cartesianas. Movimentos Retilíneos e Gráficos Posição-TempoEliana MartinsAinda não há avaliações
- 2 - Posição em Coordenadas Cartesianas. Movimentos Retilíneos e Gráficos Posição-TempoDocumento10 páginas2 - Posição em Coordenadas Cartesianas. Movimentos Retilíneos e Gráficos Posição-TempoInês RodriguesAinda não há avaliações
- Movimento em duas e três dimensõesDocumento2 páginasMovimento em duas e três dimensõesIsabela MendonçaAinda não há avaliações
- Mecânica da partícula e movimentoDocumento22 páginasMecânica da partícula e movimentosaravitorianoAinda não há avaliações
- Estudo do movimento através da posição e do tempoDocumento24 páginasEstudo do movimento através da posição e do tempoJoanaAinda não há avaliações
- Aula 05 Componentes EscalaresDocumento18 páginasAula 05 Componentes EscalaresaraujoodevAinda não há avaliações
- Questoes Globalizantes Fisica ASA ResolucaoDocumento15 páginasQuestoes Globalizantes Fisica ASA ResolucaoDiogo Alves DiasAinda não há avaliações
- Referencial - Corpo Ou Sistema de Coordenadas em Relação Ao Qual Se Define oDocumento8 páginasReferencial - Corpo Ou Sistema de Coordenadas em Relação Ao Qual Se Define oCarolina EliseuAinda não há avaliações
- M1 - Diferentes Descrições Do MovimentoDocumento25 páginasM1 - Diferentes Descrições Do MovimentoDD VitoldasAinda não há avaliações
- Mecânica do MRU e equações cinemáticasDocumento5 páginasMecânica do MRU e equações cinemáticasNelsonAinda não há avaliações
- Deslocamento, Velocidade Média, Velocidade e Aceleração PDFDocumento13 páginasDeslocamento, Velocidade Média, Velocidade e Aceleração PDFanitadiogoAinda não há avaliações
- Capítulo 4 - Movimento 1D (Teoria)Documento22 páginasCapítulo 4 - Movimento 1D (Teoria)Joaquim Guerreiro MarquesAinda não há avaliações
- TesteintermediofisicaDocumento38 páginasTesteintermediofisicamarciaarbAinda não há avaliações
- Movimento Harmônico SimplesDocumento11 páginasMovimento Harmônico SimplesTeneré Frutas e verdurasAinda não há avaliações
- Movimento Retilineo - p1Documento6 páginasMovimento Retilineo - p1rodrigo.gmAinda não há avaliações
- Ef11 Em1 PPT m1Documento15 páginasEf11 Em1 PPT m1João DiasAinda não há avaliações
- MovimentoRetilineo 1Documento28 páginasMovimentoRetilineo 1vini.yazigi16Ainda não há avaliações
- 11 - FísicaDocumento4 páginas11 - FísicaMaria LombaAinda não há avaliações
- Cinemática PtDocumento19 páginasCinemática PtAfonso Cuamba0% (1)
- Ficha 2Documento23 páginasFicha 2Jeremias júnior LibomboAinda não há avaliações
- Explorando Os Fundamentos Da CinemáticaDocumento2 páginasExplorando Os Fundamentos Da Cinemáticaeqwewq qweAinda não há avaliações
- 2.deslocamento, Velocidade Média, Velocidade e AceleraçãoDocumento13 páginas2.deslocamento, Velocidade Média, Velocidade e AceleraçãoCristina Casquilho M. CastroAinda não há avaliações
- Aula 1 - OscilaçõesDocumento17 páginasAula 1 - OscilaçõesPaulo MascarenhasAinda não há avaliações
- CINEMÁTICA VETORIAL E MOVIMENTO DE PROJÉTEISDocumento33 páginasCINEMÁTICA VETORIAL E MOVIMENTO DE PROJÉTEISViviane Coelho RodriguesAinda não há avaliações
- Resumos - Fisica - 11º - Novo - Programa - 2016Documento11 páginasResumos - Fisica - 11º - Novo - Programa - 2016Margarida FonsecaAinda não há avaliações
- Texto Características Do MovimentoDocumento2 páginasTexto Características Do MovimentoMaria CanudoAinda não há avaliações
- Notas de Aula Física 1Documento24 páginasNotas de Aula Física 1Ingrid FreitasAinda não há avaliações
- 1.1.3 - Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média - FinalDocumento7 páginas1.1.3 - Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média - FinalMarília PachecoAinda não há avaliações
- Movimento Unidimensional e AplicaçõesDocumento52 páginasMovimento Unidimensional e AplicaçõesAnonymous 8NbuTRuRfAinda não há avaliações
- Movimentos: posição, trajetória e tempoDocumento12 páginasMovimentos: posição, trajetória e tempoMaria PeçasAinda não há avaliações
- Videoaula 4 RevisadoDocumento20 páginasVideoaula 4 RevisadoDenilson SantosAinda não há avaliações
- Notas de Estudo de Conceitos de CinemáticaDocumento3 páginasNotas de Estudo de Conceitos de CinemáticaMarlon RibeiroAinda não há avaliações
- Deslocamento, Velocidade Média, Velocidade e AceleraçãoDocumento13 páginasDeslocamento, Velocidade Média, Velocidade e AceleraçãoanitadiogoAinda não há avaliações
- Movimento 1DDocumento31 páginasMovimento 1Dcalberto440Ainda não há avaliações
- 1 Aula - 20 - Setembro - Tempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoDocumento21 páginas1 Aula - 20 - Setembro - Tempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoGabriel VitalAinda não há avaliações
- Verifique o Que Aprendeu M1 - SoluçõesDocumento2 páginasVerifique o Que Aprendeu M1 - SoluçõesLeonor CostaAinda não há avaliações
- Conf 1 - Cinematica Do Ponto MaterialDocumento21 páginasConf 1 - Cinematica Do Ponto MaterialWilliam Unarineé da ConceiçãoAinda não há avaliações
- 11fisica F1.1Documento4 páginas11fisica F1.1saritalameiroAinda não há avaliações
- Física básica: cinemáticaDocumento14 páginasFísica básica: cinemáticaNilton Vir. MataveleAinda não há avaliações
- MRU VelocidadeDocumento24 páginasMRU VelocidadeAna Paula PraxedesAinda não há avaliações
- Movimento Retilineo Fisica GeralDocumento75 páginasMovimento Retilineo Fisica GeralFelipeeSiilvaaAinda não há avaliações
- Física para BiologiaDocumento23 páginasFísica para BiologiaJosé SousaAinda não há avaliações
- Tempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoDocumento24 páginasTempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoanaAinda não há avaliações
- Movimento A Uma DimensãoDocumento6 páginasMovimento A Uma DimensãoDaniel FilipeAinda não há avaliações
- Ficha 2 AlargadaDocumento20 páginasFicha 2 AlargadaMak SafoAinda não há avaliações
- Cap4Documento73 páginasCap4Anastácia CarreiroAinda não há avaliações
- Lei Da Conservação Da EnergiaDocumento3 páginasLei Da Conservação Da EnergiaSantiago Maria Cordeiro da Silva 8832Ainda não há avaliações
- Ficha de Apoio1 1. MRUDocumento2 páginasFicha de Apoio1 1. MRUIsac ManuelAinda não há avaliações
- Fisica Basica InicialDocumento42 páginasFisica Basica InicialFaida VolaiAinda não há avaliações
- Física Geral - Movimento Rectilíneo UniformeDocumento22 páginasFísica Geral - Movimento Rectilíneo UniformeidelsonAinda não há avaliações
- Deslocamento, velocidade média, velocidade e aceleração em movimento retilíneo e curvilíneoDocumento13 páginasDeslocamento, velocidade média, velocidade e aceleração em movimento retilíneo e curvilíneoanitadiogoAinda não há avaliações
- Movimento rectilíneo uniforme e uniformemente aceleradoDocumento43 páginasMovimento rectilíneo uniforme e uniformemente aceleradoJoaquim CumbaneAinda não há avaliações
- Medição em Fisico-QuimicaDocumento11 páginasMedição em Fisico-Quimicatherafecas7Ainda não há avaliações
- Sistema Terra e suas interaçõesDocumento5 páginasSistema Terra e suas interaçõesRafaelaAinda não há avaliações
- Recursos expressivos 40Documento5 páginasRecursos expressivos 40RafaelaAinda não há avaliações
- Relatório: Observação e Identificação de Rochas em Amostras de MãoDocumento7 páginasRelatório: Observação e Identificação de Rochas em Amostras de MãoRafaela100% (1)
- Átomos e suas partículasDocumento4 páginasÁtomos e suas partículasRafaelaAinda não há avaliações
- FQDocumento4 páginasFQRafaelaAinda não há avaliações
- Lista 02Documento4 páginasLista 02rubens alvesAinda não há avaliações
- Sensoriamento inteligente de transformadores para gestão de ativosDocumento8 páginasSensoriamento inteligente de transformadores para gestão de ativosSergioCarabetti100% (1)
- Português Atividade 3 AnoDocumento27 páginasPortuguês Atividade 3 AnoeulerosilvaAinda não há avaliações
- DANFE para venda de chapiscos de concretoDocumento1 páginaDANFE para venda de chapiscos de concretoBruno BenicioAinda não há avaliações
- As imunidades tributárias do artigo 150, VI da Constituição FederalDocumento3 páginasAs imunidades tributárias do artigo 150, VI da Constituição FederalAdriana MorettonAinda não há avaliações
- 4 Principais Erros Na Instalação Do Ar-Condicionado - WebArCondicionadoDocumento2 páginas4 Principais Erros Na Instalação Do Ar-Condicionado - WebArCondicionadopauloAinda não há avaliações
- Gestao de Recursos Humanos Recrutamento e SelecaoDocumento36 páginasGestao de Recursos Humanos Recrutamento e SelecaoAnaySerra50% (2)
- Nota de Aula 10ADocumento35 páginasNota de Aula 10AMarcelo RomarcoAinda não há avaliações
- Formiato de etila: Ficha de segurançaDocumento7 páginasFormiato de etila: Ficha de segurançaafrakekoAinda não há avaliações
- Desenvolvimento de Um Instrumento Brasileiro para Avaliação Da Cultura OrganizacionalDocumento10 páginasDesenvolvimento de Um Instrumento Brasileiro para Avaliação Da Cultura OrganizacionalDavi Akintolá Ferreira de OliveiraAinda não há avaliações
- Artes - MárciaDocumento5 páginasArtes - MárciaLeonardo PereiraAinda não há avaliações
- Gestão Património EstadoDocumento50 páginasGestão Património Estadocassimo luis mundimoAinda não há avaliações
- Regras VFR TMA-SP e TMA-RJDocumento2 páginasRegras VFR TMA-SP e TMA-RJDiego GomesAinda não há avaliações
- Introducao Aos BiomasDocumento9 páginasIntroducao Aos Biomasdaniel.morayan010Ainda não há avaliações
- Análise de tensões em vasos de pressão cilíndricos e esféricosDocumento42 páginasAnálise de tensões em vasos de pressão cilíndricos e esféricosJosé Roberto HonórioAinda não há avaliações
- Matrizes Determinantes IIDocumento2 páginasMatrizes Determinantes IIRonaldo NdalaAinda não há avaliações
- Seer,+Journal+Manager,+884 2263 1 CEDocumento20 páginasSeer,+Journal+Manager,+884 2263 1 CEJerônimo de Freitas RegisAinda não há avaliações
- Extrato bancário com movimentações de transferências PixDocumento11 páginasExtrato bancário com movimentações de transferências PixGilson AntunesAinda não há avaliações
- Engenharia de Saneamento Básico e Ambiental - 400h - Inbec MGDocumento8 páginasEngenharia de Saneamento Básico e Ambiental - 400h - Inbec MGCarlos OliveiraAinda não há avaliações
- A Reforma Agrária No BrasilDocumento5 páginasA Reforma Agrária No BrasilnicoleAinda não há avaliações
- Curso de técnicas de operações em terminais de contêineresDocumento11 páginasCurso de técnicas de operações em terminais de contêineresAngelo BotelhoAinda não há avaliações
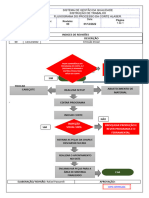
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- Modelo de Roteiro CERIMONIALDocumento2 páginasModelo de Roteiro CERIMONIALMayara Costa100% (1)