Você também pode gostar
- Relatório Controle DIscretoDocumento9 páginasRelatório Controle DIscretoDiego VinhaAinda não há avaliações
- Projeto Mecanismos - Came-SeguidorDocumento14 páginasProjeto Mecanismos - Came-SeguidorThiago LopezzAinda não há avaliações
- Output 2Documento5 páginasOutput 2Renato SilvaAinda não há avaliações
- Atividade2-Oficina UFMGDocumento5 páginasAtividade2-Oficina UFMGLeticia VitoriaAinda não há avaliações
- 8 - Regras de DerivaçãoDocumento18 páginas8 - Regras de DerivaçãoRaphael FerreiraAinda não há avaliações
- Teste Nº1 - POCH - 12ºF - 2019-2020Documento5 páginasTeste Nº1 - POCH - 12ºF - 2019-2020Gabriela OliveiraAinda não há avaliações
- Controle1 - Técnicas de Resposta em FrequênciaDocumento32 páginasControle1 - Técnicas de Resposta em FrequênciatressoengenhariaAinda não há avaliações
- Ficha Trabalho - Funções 7.ºCDocumento6 páginasFicha Trabalho - Funções 7.ºCfiliparmacedo100% (1)
- Mini Curso 03Documento26 páginasMini Curso 03salomaosantanaAinda não há avaliações
- Função e Equação Exponencial, Logaritmica e ModularDocumento5 páginasFunção e Equação Exponencial, Logaritmica e ModularCarla LimaAinda não há avaliações
- Calculo Integral III PDFDocumento26 páginasCalculo Integral III PDFCelia Fernandes Afonsina FernandesAinda não há avaliações
- Modelos Matem - Ticos de Sistemas de ControleDocumento36 páginasModelos Matem - Ticos de Sistemas de ControleSamuel GamonalAinda não há avaliações
- Lista de ExerciciosDocumento6 páginasLista de ExerciciosAline AraujoAinda não há avaliações
- Sistema de Equaã - Ã - Es LinearesDocumento32 páginasSistema de Equaã - Ã - Es Lineareskamilly amancioAinda não há avaliações
- Sistema de ControleDocumento13 páginasSistema de ControleNetoSousaAinda não há avaliações
- Função Holder Table Otimizada Por Enchame de Partículas Algoritmo PsoDocumento6 páginasFunção Holder Table Otimizada Por Enchame de Partículas Algoritmo PsoLaura SilvaAinda não há avaliações
- Versao Impressao3Documento65 páginasVersao Impressao3Tecrio ElevadoresAinda não há avaliações
- 3 - Laboratório Técnica Lugar Das RaízesDocumento10 páginas3 - Laboratório Técnica Lugar Das RaízesmarcelAinda não há avaliações
- Lista2 SSIE9Documento3 páginasLista2 SSIE9AliciaAinda não há avaliações
- Lucio TN17M1Documento16 páginasLucio TN17M1kakakasado100% (1)
- Cálculo I (MCA501) - Exercícios: Semana 1Documento183 páginasCálculo I (MCA501) - Exercícios: Semana 1Rogério Vicente100% (1)
- FT18 - Preparação Teste 5Documento4 páginasFT18 - Preparação Teste 5Joana SimoesAinda não há avaliações
- 2º Trabalho Métodos ComputacionaisDocumento9 páginas2º Trabalho Métodos ComputacionaisRobufuAinda não há avaliações
- Prática 1 - Simulação de SistemasDocumento5 páginasPrática 1 - Simulação de Sistemasjgsantana.egeAinda não há avaliações
- 10 ClasseDocumento7 páginas10 ClasseFilimone Thumbo100% (2)
- LISTA GERAL-Matematica-pre Calculo-FunçõesDocumento12 páginasLISTA GERAL-Matematica-pre Calculo-FunçõesCristiano TonéisAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- Modelagem de Filtro Passa - Entrega ParcialDocumento3 páginasModelagem de Filtro Passa - Entrega ParcialRODRIGO EMANUEL BORGESAinda não há avaliações
- Atividade Prática - Sinais e SistemasDocumento5 páginasAtividade Prática - Sinais e SistemasAprovouAinda não há avaliações
- LCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCDocumento11 páginasLCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCCesar Augusto Mendes Cordeiro da SilvaAinda não há avaliações
- Clii02 12Documento5 páginasClii02 12Maycon ThaumaturgoAinda não há avaliações
- Calculo I - Integra L (Apostila Prof Marco Aurélio Palumbo Cabral - UFRJ)Documento38 páginasCalculo I - Integra L (Apostila Prof Marco Aurélio Palumbo Cabral - UFRJ)vladimirsousaAinda não há avaliações
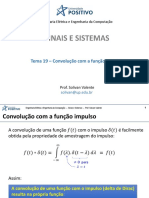
- Aula SS - Tema 19 - Convolução Com A Função ImpulsoDocumento8 páginasAula SS - Tema 19 - Convolução Com A Função ImpulsoAlex Sandro BoroskiAinda não há avaliações
- Relatório 3 - Sistemas de Controle 1Documento15 páginasRelatório 3 - Sistemas de Controle 1pipoldchapAinda não há avaliações
- Exercício I - Fund Controle de Sistemas - 13 - 07 - 2022Documento2 páginasExercício I - Fund Controle de Sistemas - 13 - 07 - 2022Guilherme Cardoso Dal PontAinda não há avaliações
- 2 - Modelos Matemáticos de Sistemas de ControleDocumento28 páginas2 - Modelos Matemáticos de Sistemas de ControleHenrique LimaAinda não há avaliações
- Lista 2Documento10 páginasLista 2Luísa GonçalvesAinda não há avaliações
- Análise Da Resposta Transitória de Um Sistema de Primeira OrdemDocumento12 páginasAnálise Da Resposta Transitória de Um Sistema de Primeira OrdemGustavoAinda não há avaliações
- Aula13 Planar 2016 RevsocorroDocumento24 páginasAula13 Planar 2016 RevsocorroCrystiane CarlaAinda não há avaliações
- MACS - 11º AnoDocumento15 páginasMACS - 11º AnoSusana FerraoAinda não há avaliações
- Resumao de Integrais de Linha Do Responde AiDocumento9 páginasResumao de Integrais de Linha Do Responde AiRuan Medeiros BahiaAinda não há avaliações
- Relatório 8 - Movimento Retilíneo Com Aceleração ConstanteDocumento13 páginasRelatório 8 - Movimento Retilíneo Com Aceleração ConstanteMarcoStalinAinda não há avaliações
- Lab 00Documento31 páginasLab 00Luiz Fernando Florentino TrevisanAinda não há avaliações
- Ficha 1 Do Modulo RPCLDocumento6 páginasFicha 1 Do Modulo RPCLGerson MacaringueAinda não há avaliações
- Celma Mariano SeverinoDocumento17 páginasCelma Mariano SeverinoAnónimoAinda não há avaliações
- DSL 20201 L2Documento3 páginasDSL 20201 L2Mariana MoreiraAinda não há avaliações
- Aula7 Matlab Tpicos 2 3Documento67 páginasAula7 Matlab Tpicos 2 3silvaAinda não há avaliações
- Aulas ProfDocumento5 páginasAulas ProfNilton Dos SantosAinda não há avaliações
- Aula 04 - Inequações Do Segundo Grau, Octave, Função ExponencialDocumento57 páginasAula 04 - Inequações Do Segundo Grau, Octave, Função ExponencialRicardo SantosAinda não há avaliações
- Prova 2 SCI 2020 1S EaDDocumento6 páginasProva 2 SCI 2020 1S EaDROBERTH HENRIQUE GUIMARAES DOS SANTOSAinda não há avaliações
- 4 - Laboratório Controlador PD, PI e PIDDocumento13 páginas4 - Laboratório Controlador PD, PI e PIDmarcelAinda não há avaliações
- WORD - Diagrama de BodeDocumento18 páginasWORD - Diagrama de BodeRomulo MondiniAinda não há avaliações
- EP6 Aula Postada Aula 12Documento8 páginasEP6 Aula Postada Aula 12Eduardo GarciaAinda não há avaliações
- Resolvendo Integrais e Derivadas Usando o MatLABDocumento10 páginasResolvendo Integrais e Derivadas Usando o MatLABOrlindo WagnerAinda não há avaliações
- 1 - Laboratório Sistemas Lineares - Estabilidade - ErrosDocumento11 páginas1 - Laboratório Sistemas Lineares - Estabilidade - ErrosMarcela CaixetaAinda não há avaliações
- Transformada de LaplaceDocumento73 páginasTransformada de LaplaceEmanuelle BatistaAinda não há avaliações
- Atividade Prática - Sinais e SistemasDocumento5 páginasAtividade Prática - Sinais e SistemasAprovouAinda não há avaliações
- Aula ScilabDocumento74 páginasAula Scilabadriasiq3068Ainda não há avaliações
- Laboratório 2 - FC2Documento14 páginasLaboratório 2 - FC2Thiago RodriguesAinda não há avaliações
- ApresentaçãoDocumento89 páginasApresentaçãoThiago RodriguesAinda não há avaliações
- Maquina SincronaDocumento117 páginasMaquina SincronaThiago RodriguesAinda não há avaliações
- ConversaoParte 02 Conceitos4Documento7 páginasConversaoParte 02 Conceitos4Thiago RodriguesAinda não há avaliações
- Manual Split MideaDocumento12 páginasManual Split MideasdscurAinda não há avaliações
- ReadmeDocumento42 páginasReadmeLeonardo SouzaAinda não há avaliações
- 2º T.C de Fis Força Eletrica de 2009Documento5 páginas2º T.C de Fis Força Eletrica de 2009Bruno Jorge SantosAinda não há avaliações
- Teoria de Ondas - AplicaçõesDocumento25 páginasTeoria de Ondas - AplicaçõesAnonymous 18kqLi2R5bAinda não há avaliações
- Redes de Computadores - Capitulo 5 (Kurose)Documento5 páginasRedes de Computadores - Capitulo 5 (Kurose)Leila RodriguesAinda não há avaliações
- Laudo Mecânico Caminhão Munck Phi-9d43Documento10 páginasLaudo Mecânico Caminhão Munck Phi-9d43Suy Ane Soares MoraisAinda não há avaliações
- Stihl Fse 60Documento24 páginasStihl Fse 60Janderson Amorim FonsecaAinda não há avaliações
- Artigo - Gestão de ObrasDocumento10 páginasArtigo - Gestão de ObrasricardoluzAinda não há avaliações
- Instrumentos TopográficosDocumento11 páginasInstrumentos TopográficosKięlsęPaulaAinda não há avaliações
- Catalogo Positivo Master N250IDocumento2 páginasCatalogo Positivo Master N250IFelipe FerreiraAinda não há avaliações
- Relatorio 8 - Curva de DestilacaoDocumento5 páginasRelatorio 8 - Curva de DestilacaoAndré Luís Della VolpeAinda não há avaliações
- Apostila Geo Hist Rondônia CompletaDocumento64 páginasApostila Geo Hist Rondônia CompletaMaikon Douglas Kiister PlasterAinda não há avaliações
- 924G PDFDocumento24 páginas924G PDFSidney Costa Viana100% (5)
- Manual Tecnico PREDIAL OI PDFDocumento22 páginasManual Tecnico PREDIAL OI PDFCézarCavalcanteAinda não há avaliações
- Conectores Rexroth PDFDocumento8 páginasConectores Rexroth PDFAndré ViníciusAinda não há avaliações
- Ciclo Da Ureia - TextoDocumento2 páginasCiclo Da Ureia - TextoAyrton Correa Fernandes de CarvalhoAinda não há avaliações
- Cinética Quimica GeralDocumento6 páginasCinética Quimica GeralJean QueirozAinda não há avaliações
- Curto Circuito em Sistemas Elétricos - Tipos, Causas e ConsequênciasDocumento20 páginasCurto Circuito em Sistemas Elétricos - Tipos, Causas e Consequênciaslorentz franklin100% (1)
- FICHA TÉCNICA - GL - Mit - DownloadDocumento1 páginaFICHA TÉCNICA - GL - Mit - DownloadDinslei FerreiraAinda não há avaliações
- Mackenzie Sapatas Novo R1Documento26 páginasMackenzie Sapatas Novo R1Renan Chama MartinAinda não há avaliações
- Divisor Carrossel 1 e 2 KGDocumento17 páginasDivisor Carrossel 1 e 2 KGEdmilson FernandesAinda não há avaliações
- RelLabMod - Radiação TérmicaDocumento40 páginasRelLabMod - Radiação TérmicaRafael BratifichAinda não há avaliações
- Exercicios de DesenhoDocumento42 páginasExercicios de Desenhoruilima2004Ainda não há avaliações
- Aula 1 - IntroduçãoDocumento43 páginasAula 1 - IntroduçãoRandal GomesAinda não há avaliações
- Chapa Expandida - GRADECOMDocumento5 páginasChapa Expandida - GRADECOMHumberto BermudezAinda não há avaliações
- DS 451 SayerrazDocumento10 páginasDS 451 Sayerrazeduardo paivaAinda não há avaliações
- TCC Banco de DadosDocumento88 páginasTCC Banco de DadosRodrigo SáAinda não há avaliações
- 5 - Lista - Exercicios Termodinamica PDFDocumento4 páginas5 - Lista - Exercicios Termodinamica PDFEduardo Lopes0% (1)
- Manual Geral para DreamboxDocumento43 páginasManual Geral para DreamboxCristiane Cardoso100% (2)
- RODAPAR - CatálogoDocumento20 páginasRODAPAR - CatálogoMagno AndradeAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- A matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNo EverandA matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNota: 4.5 de 5 estrelas4.5/5 (5)
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Princípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsNo EverandPrincípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsAinda não há avaliações
- Numerologia: Autoconhecimento através dos númerosNo EverandNumerologia: Autoconhecimento através dos númerosNota: 5 de 5 estrelas5/5 (4)
- Arduino Exodus Iniciantes Arduino E Projetos: Esp8266 Arduino Ide Guia Basico Arduino CodigoNo EverandArduino Exodus Iniciantes Arduino E Projetos: Esp8266 Arduino Ide Guia Basico Arduino CodigoAinda não há avaliações
- Ensino De MatemáticaNo EverandEnsino De MatemáticaAinda não há avaliações