Você também pode gostar
- 1 - Laboratório Sistemas Lineares - EstabilidadeDocumento9 páginas1 - Laboratório Sistemas Lineares - Estabilidadejmaj jmajAinda não há avaliações
- 1 - Laboratório Sistemas Lineares - Estabilidade - ErrosDocumento11 páginas1 - Laboratório Sistemas Lineares - Estabilidade - ErrosMarcela CaixetaAinda não há avaliações
- Aula7 Matlab Tpicos 2 3Documento67 páginasAula7 Matlab Tpicos 2 3silvaAinda não há avaliações
- Modelos Matem - Ticos de Sistemas de ControleDocumento36 páginasModelos Matem - Ticos de Sistemas de ControleSamuel GamonalAinda não há avaliações
- Análise da resposta transitória de um sistema de 1a ordemDocumento12 páginasAnálise da resposta transitória de um sistema de 1a ordemGustavoAinda não há avaliações
- Lista de ExerciciosDocumento6 páginasLista de ExerciciosAline AraujoAinda não há avaliações
- Modelos matemáticos de sistemas dinâmicosDocumento17 páginasModelos matemáticos de sistemas dinâmicosVarzeanoAinda não há avaliações
- ETEP - Exercícios de Engenharia usando MATLAB/SIMULINKDocumento4 páginasETEP - Exercícios de Engenharia usando MATLAB/SIMULINKAbel FelipeAinda não há avaliações
- Modelagem matemática de sistemas de controleDocumento28 páginasModelagem matemática de sistemas de controleHenrique LimaAinda não há avaliações
- Derivadas Na Calc HPDocumento14 páginasDerivadas Na Calc HPcavieira2Ainda não há avaliações
- Função de Transferência: Tutorial MatlabDocumento8 páginasFunção de Transferência: Tutorial MatlabAntonio Batista100% (1)
- Função de TransferênciaDocumento27 páginasFunção de TransferênciaAllan GumesAinda não há avaliações
- Função de transferência em sistemas com realimentaçãoDocumento10 páginasFunção de transferência em sistemas com realimentaçãoGabby GabrielAinda não há avaliações
- TRABALHOFINALpdfDocumento27 páginasTRABALHOFINALpdfLAYDETCAinda não há avaliações
- Modelagem de Sistemas na FrequênciaDocumento100 páginasModelagem de Sistemas na FrequênciaJosandersonDalmasoJosandersonAinda não há avaliações
- Control PDFDocumento112 páginasControl PDFVinicius BortoluzziAinda não há avaliações
- Mini Curso 03Documento26 páginasMini Curso 03salomaosantanaAinda não há avaliações
- Lista 1Documento9 páginasLista 1Grazielle Tomaz NevesAinda não há avaliações
- Relatório Convolução - Felipe LinsDocumento7 páginasRelatório Convolução - Felipe LinsFelipe GustavoAinda não há avaliações
- Sistemas de Controle: Função de Transferência e Diagrama de BlocosDocumento35 páginasSistemas de Controle: Função de Transferência e Diagrama de BlocosBejamin AndersonAinda não há avaliações
- Simulação de sistemas mecânicos e convolução de sinais usando números de matrículaDocumento8 páginasSimulação de sistemas mecânicos e convolução de sinais usando números de matrículaTiago ChavesAinda não há avaliações
- IntegraçãoDocumento6 páginasIntegraçãolemaun5712Ainda não há avaliações
- Laplace No MatlabDocumento10 páginasLaplace No MatlabNazareno BragaAinda não há avaliações
- Função de Transferência do Modelo de Insulina GlargineDocumento12 páginasFunção de Transferência do Modelo de Insulina GlargineCarlos LimaAinda não há avaliações
- Pré cálculo - revisão geralDocumento12 páginasPré cálculo - revisão geralCristiano TonéisAinda não há avaliações
- Sistema Eletro HidraulicoDocumento12 páginasSistema Eletro HidraulicodiegoarimateiaAinda não há avaliações
- Sinais ElementaresDocumento12 páginasSinais ElementaresLavoisier Chaves RamosAinda não há avaliações
- Atividade Complementar Exercícios NP1Documento2 páginasAtividade Complementar Exercícios NP1Ingrid AndradeAinda não há avaliações
- RltoolDocumento7 páginasRltooladilsondissoAinda não há avaliações
- Modelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkDocumento7 páginasModelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkJuscelino RodriguesAinda não há avaliações
- Lista 2Documento12 páginasLista 2DokScyAinda não há avaliações
- Aula01 - Função de TransferênciaDocumento72 páginasAula01 - Função de TransferênciaJonas Souza VasconcelosAinda não há avaliações
- Exercícios Controle e ServomecanismosDocumento4 páginasExercícios Controle e ServomecanismosHugo FusinatoAinda não há avaliações
- Exercício I - Fund Controle de Sistemas - 13 - 07 - 2022Documento2 páginasExercício I - Fund Controle de Sistemas - 13 - 07 - 2022Guilherme Cardoso Dal PontAinda não há avaliações
- Derivadas: Introdução e AplicaçõesDocumento64 páginasDerivadas: Introdução e AplicaçõesAna PaulaAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- Aula 07 Complexidade de AlgoritmosDocumento57 páginasAula 07 Complexidade de AlgoritmosskimorodAinda não há avaliações
- Laboratório 1 - FC2Documento19 páginasLaboratório 1 - FC2Thiago RodriguesAinda não há avaliações
- Funções Vetoriais - Aula 3.1Documento5 páginasFunções Vetoriais - Aula 3.1lucasqueiroz.sAinda não há avaliações
- Aprendendo programação com MatlabDocumento13 páginasAprendendo programação com MatlabmarciosbAinda não há avaliações
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 páginas5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasAinda não há avaliações
- BCC - Aula 01 - Fundamentos Da ComputaçãoDocumento41 páginasBCC - Aula 01 - Fundamentos Da ComputaçãoPedro Tavares MurakameAinda não há avaliações
- MatLab, Apostila - Princípios BásicosDocumento11 páginasMatLab, Apostila - Princípios BásicosxtroniAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- MEC 2325 - Transmissão de Calor – Condução - 2021.1Documento22 páginasMEC 2325 - Transmissão de Calor – Condução - 2021.1Edgardo Rafael Castro PachecoAinda não há avaliações
- Lista de Exercícios de Simulação de Sistemas do IFSP Cubatão analisa estabilidade e respostas de sistemas de controleDocumento3 páginasLista de Exercícios de Simulação de Sistemas do IFSP Cubatão analisa estabilidade e respostas de sistemas de controleAliciaAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Análise Matemática Para Engenharia II: Velocidade e Aceleração VetorialDocumento6 páginasAnálise Matemática Para Engenharia II: Velocidade e Aceleração VetorialJuliene MonteiroAinda não há avaliações
- Recursividade PDFDocumento5 páginasRecursividade PDFGabriel MesquitaAinda não há avaliações
- Simulação de amortecedor massa-mola no MatLabDocumento8 páginasSimulação de amortecedor massa-mola no MatLabGabriel BragaAinda não há avaliações
- Controle Automático: Aula 2 - 1Documento64 páginasControle Automático: Aula 2 - 1Leo WilliamAinda não há avaliações
- 10 ClasseDocumento7 páginas10 ClasseFilimone Thumbo100% (2)
- Cálculo I - Exercícios Semana 1Documento183 páginasCálculo I - Exercícios Semana 1Rogério Vicente100% (1)
- Modelagem de Filtro Passa-Alta de Segunda OrdemDocumento3 páginasModelagem de Filtro Passa-Alta de Segunda OrdemRODRIGO EMANUEL BORGESAinda não há avaliações
- Lista 02Documento16 páginasLista 02ruy_a_mAinda não há avaliações
- Funções No MatlabDocumento5 páginasFunções No MatlabLuisGFAinda não há avaliações
- Questionario Linguagem e Tecnicas de Programação VIDocumento7 páginasQuestionario Linguagem e Tecnicas de Programação VICesar AugustoAinda não há avaliações
- 01 Lecture27Documento23 páginas01 Lecture27Marco GuimarãesAinda não há avaliações
- Simulação de sistemas dinâmicos usando ode45 no MatlabDocumento8 páginasSimulação de sistemas dinâmicos usando ode45 no MatlabLeticia VitoriaAinda não há avaliações
- Atividade4 OficinaDocumento4 páginasAtividade4 OficinaLeticia VitoriaAinda não há avaliações
- Atividade4 OficinaDocumento4 páginasAtividade4 OficinaLeticia VitoriaAinda não há avaliações
- Atividade 10Documento7 páginasAtividade 10Leticia VitoriaAinda não há avaliações
- Atividade6 - Oficina UFMGDocumento8 páginasAtividade6 - Oficina UFMGLeticia VitoriaAinda não há avaliações
- Modelando e simulando sistemas dinâmicosDocumento6 páginasModelando e simulando sistemas dinâmicosLeticia VitoriaAinda não há avaliações
- Lista 5Documento3 páginasLista 5Leticia VitoriaAinda não há avaliações
- Lista 4Documento6 páginasLista 4Leticia VitoriaAinda não há avaliações
- Lista 2Documento4 páginasLista 2Leticia VitoriaAinda não há avaliações
- Lista 3Documento2 páginasLista 3Leticia VitoriaAinda não há avaliações
- Softwares para TopografiaDocumento99 páginasSoftwares para TopografialauraAinda não há avaliações
- 823.828.165-20 DAE Único - Licenciamento Integrado 823.828.165-20 Nadson Gouvea Santana JPY1645 27400 SalvadorDocumento1 página823.828.165-20 DAE Único - Licenciamento Integrado 823.828.165-20 Nadson Gouvea Santana JPY1645 27400 SalvadorNadson SantanaAinda não há avaliações
- Exercito DENTISTICA 2018 2019Documento15 páginasExercito DENTISTICA 2018 2019Jullian JsAinda não há avaliações
- Finanças Pessoais e InvestimentosDocumento17 páginasFinanças Pessoais e InvestimentosMiguelSalgadoAinda não há avaliações
- Análise de tensões em vasos de pressão cilíndricos e esféricosDocumento42 páginasAnálise de tensões em vasos de pressão cilíndricos e esféricosJosé Roberto HonórioAinda não há avaliações
- Os 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoDocumento3 páginasOs 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoSílvio FonteneleAinda não há avaliações
- O que é um e-mailDocumento3 páginasO que é um e-mailEfraim MoraesAinda não há avaliações
- Engenharia de Saneamento Básico e Ambiental - 400h - Inbec MGDocumento8 páginasEngenharia de Saneamento Básico e Ambiental - 400h - Inbec MGCarlos OliveiraAinda não há avaliações
- Como Obama consegue ser produtivoDocumento4 páginasComo Obama consegue ser produtivoMoby Sport OficialAinda não há avaliações
- Português Atividade 3 AnoDocumento27 páginasPortuguês Atividade 3 AnoeulerosilvaAinda não há avaliações
- Relações Econômicas InternacionaisDocumento3 páginasRelações Econômicas InternacionaisBrunaAinda não há avaliações
- Horóscopo detalhado: elementos, planetas e ascendenteDocumento26 páginasHoróscopo detalhado: elementos, planetas e ascendenteMatheus Sousa DafiAinda não há avaliações
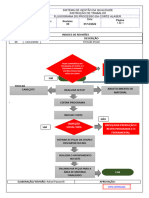
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- Introducao Aos BiomasDocumento9 páginasIntroducao Aos Biomasdaniel.morayan010Ainda não há avaliações
- GratidãoDocumento2 páginasGratidãocristinalang21Ainda não há avaliações
- Modelo de Roteiro CERIMONIALDocumento2 páginasModelo de Roteiro CERIMONIALMayara Costa100% (1)
- Chico Xavier - Pelo Espírito André Luiz - Mecanismos Da MediunidadeDocumento101 páginasChico Xavier - Pelo Espírito André Luiz - Mecanismos Da MediunidadeGbgu3Ainda não há avaliações
- Gestão Património EstadoDocumento50 páginasGestão Património Estadocassimo luis mundimoAinda não há avaliações
- Lista 02Documento4 páginasLista 02rubens alvesAinda não há avaliações
- Ebook PrincipalDocumento28 páginasEbook Principalcamily candyAinda não há avaliações
- DANFE para venda de chapiscos de concretoDocumento1 páginaDANFE para venda de chapiscos de concretoBruno BenicioAinda não há avaliações
- Lista de exercícios avaliativa de circuitos digitaisDocumento4 páginasLista de exercícios avaliativa de circuitos digitaisElder SantosAinda não há avaliações
- Formação Identidade e Relação Pais-FilhosDocumento16 páginasFormação Identidade e Relação Pais-FilhosFelix Nungo FmnAinda não há avaliações
- Codigos de Contas Do SNCDocumento8 páginasCodigos de Contas Do SNCAntónio Fernando FerreiraAinda não há avaliações
- Tratamento candidíase vaginalDocumento6 páginasTratamento candidíase vaginalDiana PereiraAinda não há avaliações
- As imunidades tributárias do artigo 150, VI da Constituição FederalDocumento3 páginasAs imunidades tributárias do artigo 150, VI da Constituição FederalAdriana MorettonAinda não há avaliações
- Fisioterapia e Ventilação MecânicaDocumento10 páginasFisioterapia e Ventilação MecânicaLeonardo Da Silva AlvesAinda não há avaliações
- APOSTILA LínguaPortuguesaDocumento110 páginasAPOSTILA LínguaPortuguesaAlessandro TorrezaniAinda não há avaliações
- Capo 1Documento1 páginaCapo 1Raphael VicenteAinda não há avaliações
- Docs V TrabalhoDocumento1 páginaDocs V TrabalhoPaulo MeloAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)
- Indicadores Matemáticos Para Apostas Em FutebolNo EverandIndicadores Matemáticos Para Apostas Em FutebolAinda não há avaliações