Você também pode gostar
- Engenharia De Sistemas RadiovisibilidadeNo EverandEngenharia De Sistemas RadiovisibilidadeAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Decibelímetro Programado No PicNo EverandDesenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Decibelímetro Programado No PicAinda não há avaliações
- Cartilha de Caracterização de Áudio - Texas InstrumentsDocumento13 páginasCartilha de Caracterização de Áudio - Texas InstrumentsMarcos AurelioAinda não há avaliações
- TCC GuilhermeBilbaoDocumento81 páginasTCC GuilhermeBilbaoClaudinei FigueiraAinda não há avaliações
- Compressão de Voz VocodersDocumento17 páginasCompressão de Voz VocodersAdriano PereiraAinda não há avaliações
- Som 2Documento44 páginasSom 2RafaelBiondoAinda não há avaliações
- PG Jocimar FinalDocumento68 páginasPG Jocimar FinalengjocimarAinda não há avaliações
- Cypevac III Memoria de CalculoDocumento14 páginasCypevac III Memoria de CalculomicnunAinda não há avaliações
- Dissert Helio Contole Ruido Setor Madereiro 20160915134222 PDFDocumento124 páginasDissert Helio Contole Ruido Setor Madereiro 20160915134222 PDFRafael RafaelaAinda não há avaliações
- IA Aplicada À Transcrição de Acordes de ViolãoDocumento77 páginasIA Aplicada À Transcrição de Acordes de ViolãoAndré Duarte Abou JaoudeAinda não há avaliações
- Espectrofotômetro e Cabine de LuzDocumento77 páginasEspectrofotômetro e Cabine de LuzKaio MaxAinda não há avaliações
- Análise Modal ExperimentalDocumento57 páginasAnálise Modal ExperimentalJose Prado100% (1)
- Multimídia 3º UnidadeDocumento17 páginasMultimídia 3º UnidadepaulotestewebAinda não há avaliações
- Gravacao de Guitarras IIDocumento49 páginasGravacao de Guitarras IIThyago TrajanoAinda não há avaliações
- Modulações em Amplitude - Desvio de Freq e Fase No Receptor - Pag 29Documento104 páginasModulações em Amplitude - Desvio de Freq e Fase No Receptor - Pag 29diogo edlerAinda não há avaliações
- FWM589 19Documento94 páginasFWM589 19Valdir KoxinhaprAinda não há avaliações
- Tese Amplificador de Audio Classe DprovisoriaDocumento131 páginasTese Amplificador de Audio Classe DprovisoriadnafAinda não há avaliações
- Manual SmartdBDocumento27 páginasManual SmartdBCleiton BarrosAinda não há avaliações
- Universidade Federal Rural Do Semi-Árido Centro Multidisciplinar de Pau Dos Ferros Engenharia de Computação Sistema de Transmissão de DadosDocumento15 páginasUniversidade Federal Rural Do Semi-Árido Centro Multidisciplinar de Pau Dos Ferros Engenharia de Computação Sistema de Transmissão de DadosVanerica AlvesAinda não há avaliações
- Philips FW M777 19Documento71 páginasPhilips FW M777 19Chiquinho SantosAinda não há avaliações
- FWM777Documento88 páginasFWM777RangelCarvalhoAinda não há avaliações
- Monografia TV DigitalDocumento123 páginasMonografia TV Digitalguiguivl1Ainda não há avaliações
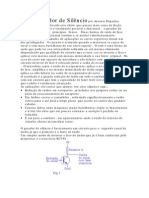
- Gerador de SilêncioDocumento4 páginasGerador de SilênciophelipescostaAinda não há avaliações
- UntitledDocumento26 páginasUntitledEduardo J FernandesAinda não há avaliações
- LabCom I 2020Documento70 páginasLabCom I 2020Duda AndradeAinda não há avaliações
- Conversores AD/DA - Revisão TeóricaDocumento18 páginasConversores AD/DA - Revisão TeóricaLucasAinda não há avaliações
- Valendo 2Documento101 páginasValendo 2Dj Paulo BalaAinda não há avaliações
- Dipolo Magnético Ressonante e Seus ModelosDocumento96 páginasDipolo Magnético Ressonante e Seus ModelosCarlos Roberto Souza TeixeiraAinda não há avaliações
- Curso de Eletrônica Fundamentos de Som e AcústicaDocumento15 páginasCurso de Eletrônica Fundamentos de Som e AcústicajackaugustAinda não há avaliações
- Lincoln Tomaz de Sousa - TCC Eng. Elétrica 2014Documento72 páginasLincoln Tomaz de Sousa - TCC Eng. Elétrica 2014ala sousa LimaAinda não há avaliações
- Pemc1823 DDocumento164 páginasPemc1823 DJosé SalesAinda não há avaliações
- MULTINOVA - ProjetusDocumento54 páginasMULTINOVA - ProjetusRafael Ávila JanzAinda não há avaliações
- Calculo de FrequenciasDocumento140 páginasCalculo de FrequenciasRICARDO DOS SANTOS DE SOUZAAinda não há avaliações
- Utilização de Sondas Lambda em Caldeiras de Biomassa PDFDocumento85 páginasUtilização de Sondas Lambda em Caldeiras de Biomassa PDFmozartfmarAinda não há avaliações
- Sensor de Presença para Semáforo Inteligente de Baixo CustoDocumento91 páginasSensor de Presença para Semáforo Inteligente de Baixo CustoAndrea SerranoAinda não há avaliações
- Projeto Integrador Detector de RuídoDocumento22 páginasProjeto Integrador Detector de RuídoMauroAinda não há avaliações
- NBR 10152Documento27 páginasNBR 10152Márcio NavarroAinda não há avaliações
- Som FX - Alex Case PDFDocumento475 páginasSom FX - Alex Case PDFAdriangelo LimaAinda não há avaliações
- Kleber Melo e Silva - Tese Ppgee 2009Documento203 páginasKleber Melo e Silva - Tese Ppgee 2009thiagogirouxAinda não há avaliações
- EchoStudio - User - Manual - Rev11 - 20190115 PTDocumento76 páginasEchoStudio - User - Manual - Rev11 - 20190115 PTCarlos Luciano Cardoso De Araujo100% (1)
- Trabalho DWDM Efeitos N LinearesDocumento91 páginasTrabalho DWDM Efeitos N LinearesGledson RodriguesAinda não há avaliações
- Parametrização VEGAPULS 62-63-68Documento29 páginasParametrização VEGAPULS 62-63-68wagner machado de moraesAinda não há avaliações
- Dissertacao CesarSaDocumento94 páginasDissertacao CesarSarochaseletronicaAinda não há avaliações
- Marcelo - Pds - Apostila Pds PDFDocumento118 páginasMarcelo - Pds - Apostila Pds PDFIvone G. LuizAinda não há avaliações
- Projeto e Implementaã - Ã - o de Um Amplificador de Audio Classe DDocumento108 páginasProjeto e Implementaã - Ã - o de Um Amplificador de Audio Classe DElenilson FernandesAinda não há avaliações
- Monitorando Decibelímetro No Pic Com Sintetizador De Voz Programado No Visual C#No EverandMonitorando Decibelímetro No Pic Com Sintetizador De Voz Programado No Visual C#Ainda não há avaliações
- Criterios Analise Relacoes Exposicao Impacte Ruido Infra Estruturas TransporteDocumento106 páginasCriterios Analise Relacoes Exposicao Impacte Ruido Infra Estruturas TransporteRodrigo CastroAinda não há avaliações
- Monopol I 10022383Documento59 páginasMonopol I 10022383Dávila LopesAinda não há avaliações
- TCC - Modulação Senoidal Bipolar PWM Aplicada em Inversores de FrequênciaDocumento100 páginasTCC - Modulação Senoidal Bipolar PWM Aplicada em Inversores de FrequênciaGabriel AlmeidaAinda não há avaliações
- Monitorando Um Decibelímetro Com O Pic E Visual BasicNo EverandMonitorando Um Decibelímetro Com O Pic E Visual BasicAinda não há avaliações
- Livro ElementosTelecomPropaga PDFDocumento298 páginasLivro ElementosTelecomPropaga PDFHugo Mendes100% (1)
- Active Noise Control HeadphonesDocumento118 páginasActive Noise Control HeadphonesBDIRI HaythemAinda não há avaliações
- Monitorando Um Decibelímetro Com O Pic E Android Programado No App InventorNo EverandMonitorando Um Decibelímetro Com O Pic E Android Programado No App InventorAinda não há avaliações
- TCC LeandraDocumento67 páginasTCC LeandraLeandra AbreuAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Decibelímetro Programado No PicNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Decibelímetro Programado No PicAinda não há avaliações
- Projeto de Sistema de Escapamento para Motores de Combustão InternaDocumento66 páginasProjeto de Sistema de Escapamento para Motores de Combustão InternaKepler TiburcioAinda não há avaliações
- CT - CPGEI - M - Dorabiato, Luiz Fernando - 2007Documento122 páginasCT - CPGEI - M - Dorabiato, Luiz Fernando - 2007Suporte TecnicoAinda não há avaliações
- Folder - SONOCHEKDocumento6 páginasFolder - SONOCHEKElohim PredictiveAinda não há avaliações
- Monitorando Um Decibelímetro Com O Pic E Visual C#No EverandMonitorando Um Decibelímetro Com O Pic E Visual C#Ainda não há avaliações
- Natan Gabriel Be CchiDocumento67 páginasNatan Gabriel Be CchiJorge LuisAinda não há avaliações
- O Reino e o Monte - Palavra & Vida-1Documento117 páginasO Reino e o Monte - Palavra & Vida-1Jenielson Lopes100% (1)
- Bíblia Brasileira de EstudoDocumento1 páginaBíblia Brasileira de EstudoAlessandro Da Cruz GoncalvesAinda não há avaliações
- Uma Só CarneDocumento1 páginaUma Só CarneAlessandro Da Cruz GoncalvesAinda não há avaliações
- Estudo Comparativo Entre Conjuntos de Seções de Choque: Ministériodoexército Dep CtexDocumento84 páginasEstudo Comparativo Entre Conjuntos de Seções de Choque: Ministériodoexército Dep CtexAlessandro Da Cruz GoncalvesAinda não há avaliações
- Uma Só CarneDocumento2 páginasUma Só CarneAlessandro Da Cruz GoncalvesAinda não há avaliações
- Uma Só CarneDocumento2 páginasUma Só CarneAlessandro Da Cruz GoncalvesAinda não há avaliações
- Uma Só CarneDocumento2 páginasUma Só CarneAlessandro Da Cruz GoncalvesAinda não há avaliações
- Siqueira Guia MatLab para Alunos de Engenharia Eletrica Computacao e AutomacaoDocumento64 páginasSiqueira Guia MatLab para Alunos de Engenharia Eletrica Computacao e Automacaoaugusto_pires_1Ainda não há avaliações
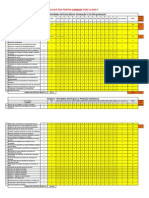
- Tabela Classe C - Progressão e Promoção - Versão Final - Maio2015 PDFDocumento6 páginasTabela Classe C - Progressão e Promoção - Versão Final - Maio2015 PDFAlessandro Da Cruz GoncalvesAinda não há avaliações
- Tabela Classe C - Progressão e Promoção - Versão Final - Maio2015 PDFDocumento5 páginasTabela Classe C - Progressão e Promoção - Versão Final - Maio2015 PDFAlessandro Da Cruz GoncalvesAinda não há avaliações
- Notas Funcao GreenDocumento5 páginasNotas Funcao GreenEverlin FerreiraAinda não há avaliações
- Mec PT IntercambiavelDocumento28 páginasMec PT IntercambiavelErick PiresAinda não há avaliações
- Provao de Bolsas Do em Afa Efomm en Questoes 2022Documento18 páginasProvao de Bolsas Do em Afa Efomm en Questoes 2022JORGINtd2Ainda não há avaliações
- 2° Lista de Máquinas TérmicasDocumento9 páginas2° Lista de Máquinas TérmicascarlosAinda não há avaliações
- Código: 3748/05: Módulo EDC7 Euro VDocumento5 páginasCódigo: 3748/05: Módulo EDC7 Euro VDaniel Henrique PiovesaniAinda não há avaliações
- Novas Tecnologias Analise Documental-Artigo CompletoDocumento7 páginasNovas Tecnologias Analise Documental-Artigo CompletoDavidson Leandro Silva dos SantosAinda não há avaliações
- Avaliação1 EE EM 2021.2Documento3 páginasAvaliação1 EE EM 2021.2Vitória GonçalvesAinda não há avaliações
- Manual Motobomba Sibrape BAP Fit e BAPDocumento16 páginasManual Motobomba Sibrape BAP Fit e BAPmareuniceAinda não há avaliações
- Vibracões 3Documento33 páginasVibracões 3Wall LimaAinda não há avaliações
- Apostila Conformação MecanicaDocumento39 páginasApostila Conformação MecanicaJosé Rosa de Souza Farias100% (1)
- PONTESDocumento60 páginasPONTESNathalia SousaAinda não há avaliações
- 1 - Panel de Operación - BR24D14001802 - 00Documento27 páginas1 - Panel de Operación - BR24D14001802 - 00Erick Vargas100% (1)
- Apostila Metalurgia Da Soldagem - Fissuração Na SoldagemDocumento13 páginasApostila Metalurgia Da Soldagem - Fissuração Na Soldagemjefferson santosAinda não há avaliações
- Mobil Dte 26 UltraDocumento10 páginasMobil Dte 26 UltraElisio Alves de Sousa JuniorAinda não há avaliações
- Literatura 416e Florestal PDFDocumento49 páginasLiteratura 416e Florestal PDFViniciusCamargosAinda não há avaliações
- Dados Da Fatura de ElectricidadeDocumento2 páginasDados Da Fatura de ElectricidadeRui FonteAinda não há avaliações
- ATIVIDADE 10.12.2020 Karollaynne 1 T02Documento3 páginasATIVIDADE 10.12.2020 Karollaynne 1 T02Karollaynne Oliveira SantosAinda não há avaliações
- Prevencao de IncendiosDocumento76 páginasPrevencao de IncendiosSimone SegattoAinda não há avaliações
- Manual de Instruções: Nome Da MáquinaDocumento20 páginasManual de Instruções: Nome Da MáquinaFidal Salomao Sibia100% (1)
- Manual de Filtros Ap 20 30 50 75 100 AlbaceteDocumento14 páginasManual de Filtros Ap 20 30 50 75 100 AlbaceteJosimar SilvaAinda não há avaliações
- EM Regular - QuímicaDocumento18 páginasEM Regular - QuímicaAline Jacuboski BianquiAinda não há avaliações
- Frequencímetro de Alta Resolução DVM13MFC2Documento6 páginasFrequencímetro de Alta Resolução DVM13MFC2Antonio C D FerreiraAinda não há avaliações
- Catalogo Digital - Produtos Dyv (Atual)Documento11 páginasCatalogo Digital - Produtos Dyv (Atual)Manoel BatistaAinda não há avaliações
- Prova 2 - Turma 2018Documento5 páginasProva 2 - Turma 2018Tauã PaternostroAinda não há avaliações
- Abnt NBR 16.655 - 1Documento21 páginasAbnt NBR 16.655 - 1Ricardo MeyerAinda não há avaliações
- Manual de Bombas Centrífugas1Documento43 páginasManual de Bombas Centrífugas1AlcibilioAinda não há avaliações
- A05-Estudo Das RetasDocumento6 páginasA05-Estudo Das RetasGustavo SalvadorAinda não há avaliações
- Relatório - Constante de PlanckDocumento13 páginasRelatório - Constante de PlanckThais RosinhaAinda não há avaliações
- 2 - Dilatação Térmica Dos SólidosDocumento27 páginas2 - Dilatação Térmica Dos SólidosMaicon Humberto De AguiarAinda não há avaliações
- Fotossíntese - o Que É, Função, Etapas, Importância - Biologia NetDocumento3 páginasFotossíntese - o Que É, Função, Etapas, Importância - Biologia NetDuda FernandesAinda não há avaliações
- Drapper Guia Rápido IIIDocumento4 páginasDrapper Guia Rápido IIIVinicius Santos Agronomia100% (1)