Você também pode gostar
- Aula 01Documento17 páginasAula 01Hanza AssuateAinda não há avaliações
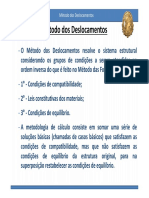
- Método dos DeslocamentosDocumento7 páginasMétodo dos DeslocamentosIversom CastroAinda não há avaliações
- Metodo Dos Deslocamentos 2023 Parte02Documento77 páginasMetodo Dos Deslocamentos 2023 Parte02M. Daiane Boeno GomesAinda não há avaliações
- Trabalho de Análise EstruturalDocumento14 páginasTrabalho de Análise EstruturalMitelsonAinda não há avaliações
- W Conceitos FundamentaisDocumento14 páginasW Conceitos FundamentaisMitelsonAinda não há avaliações
- Trabalho de Análise EstruturalDocumento14 páginasTrabalho de Análise EstruturalMitelsonAinda não há avaliações
- Análise Das Estruturas - Método Dos Deslocamentos - AlunosDocumento14 páginasAnálise Das Estruturas - Método Dos Deslocamentos - AlunosLuis HenriqueAinda não há avaliações
- Análise de estruturas pelo método dos deslocamentosDocumento37 páginasAnálise de estruturas pelo método dos deslocamentosAndré Lara Resende100% (1)
- Distinguir métodos reticulados e articuladosDocumento9 páginasDistinguir métodos reticulados e articuladosEduardo SilvaAinda não há avaliações
- Modelagem de lajes por grelhasDocumento10 páginasModelagem de lajes por grelhasGETULIO VICENTE VIEIRA MENEZESAinda não há avaliações
- Deslocamentos em Estruturas LinearesDocumento18 páginasDeslocamentos em Estruturas LinearesjucasuegeAinda não há avaliações
- PaulaVilela InicCient 2006Documento25 páginasPaulaVilela InicCient 2006Jeancarlo RibasAinda não há avaliações
- Avg Teoria Das EstruturasDocumento21 páginasAvg Teoria Das EstruturasProf Perito Pedro PóvoasAinda não há avaliações
- Análise Matricial de Estruturas ReticuladasDocumento38 páginasAnálise Matricial de Estruturas ReticuladasBruno Felipe Firmino de SouzaAinda não há avaliações
- Aula 1-2Documento33 páginasAula 1-2Sol Avelar DutraAinda não há avaliações
- Introdução à análise estruturalDocumento5 páginasIntrodução à análise estruturalMauricio F. OliveiraAinda não há avaliações
- Solucoes Regional 2013 PDFDocumento24 páginasSolucoes Regional 2013 PDFa3kiraAinda não há avaliações
- Pergunta 1: 1 PontosDocumento5 páginasPergunta 1: 1 PontosRomana PonteAinda não há avaliações
- Análise de estruturas planas utilizando o método da rigidezDocumento12 páginasAnálise de estruturas planas utilizando o método da rigidezAndreia Cristina da SilvaAinda não há avaliações
- Análise Estrutural emDocumento5 páginasAnálise Estrutural emvinicius severoAinda não há avaliações
- Marcos o pórticos 2DDocumento16 páginasMarcos o pórticos 2DAaron Lapa MoscosoAinda não há avaliações
- Equilíbrio de Um Elemento EstruturalDocumento34 páginasEquilíbrio de Um Elemento EstruturalMariana LeiteAinda não há avaliações
- Metodo Dos Deslocamentos PDFDocumento18 páginasMetodo Dos Deslocamentos PDFAnonymous lfxmwgEAinda não há avaliações
- Linha ElásticaDocumento8 páginasLinha Elásticaflatjack2013Ainda não há avaliações
- Curso de Analise EstruturalDocumento398 páginasCurso de Analise EstruturalAcacio Vieira91% (11)
- Cap 03 PórticosDocumento58 páginasCap 03 PórticosElenildo Silva90% (10)
- Mecânica Dos Sólidos Vigas: Forças Internas em Membros EstruturaisDocumento25 páginasMecânica Dos Sólidos Vigas: Forças Internas em Membros EstruturaisJoão Carlos Prado JúniorAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Análise de Sistemas Lineares com Diagramas de BlocosDocumento43 páginasAnálise de Sistemas Lineares com Diagramas de BlocosJosemar ChavesAinda não há avaliações
- 1 - Análise de EstruturasDocumento56 páginas1 - Análise de EstruturasyasminmannucciAinda não há avaliações
- Apostila Metodo Dos DeslocamentosDocumento6 páginasApostila Metodo Dos DeslocamentosRomildo JuniorAinda não há avaliações
- FORÇAS INTERNAS EM VIGAS E BARRASDocumento53 páginasFORÇAS INTERNAS EM VIGAS E BARRASALEXANDRE67% (3)
- Calculo de DeslocamentosDocumento27 páginasCalculo de DeslocamentosFilipe Pereira BattistiAinda não há avaliações
- TensoresDocumento42 páginasTensoresTadeu Fernando100% (1)
- Modelo de eficiência de trens de engrenagens cilíndricas simples com o Método de DaviesDocumento52 páginasModelo de eficiência de trens de engrenagens cilíndricas simples com o Método de DaviesMarina Baldissera de SouzaAinda não há avaliações
- Prova 2 - Teoria Das Estrutura III - 2021-2Documento3 páginasProva 2 - Teoria Das Estrutura III - 2021-2Fabiano PimentelAinda não há avaliações
- Torção de barras circularesDocumento12 páginasTorção de barras circularesbrunoab89Ainda não há avaliações
- Teoria Das Estruturas IIDocumento48 páginasTeoria Das Estruturas IIEvandro Paulo FollettoAinda não há avaliações
- Analise Estrutural I - Encontro IVDocumento32 páginasAnalise Estrutural I - Encontro IVJason SmithAinda não há avaliações
- Determinação da eficiência de máquinas complexas usando teoria de grafos e helicoidesDocumento62 páginasDeterminação da eficiência de máquinas complexas usando teoria de grafos e helicoidesMarina Baldissera de SouzaAinda não há avaliações
- Posições de Rede e Notação CristalográficaDocumento55 páginasPosições de Rede e Notação CristalográficaJose Do Carmo JuniorAinda não há avaliações
- Método Deslocamentos Resolve EstruturasDocumento85 páginasMétodo Deslocamentos Resolve EstruturasDaniel AssefAinda não há avaliações
- Aula 03 Electrodinamica ClassicaDocumento39 páginasAula 03 Electrodinamica ClassicaFernando ChiringoAinda não há avaliações
- Método dos Deslocamentos dos Nós na Análise EstruturalDocumento58 páginasMétodo dos Deslocamentos dos Nós na Análise EstruturalMiguel Monteiro100% (1)
- Engenharia Controle Sistemas DinâmicosDocumento19 páginasEngenharia Controle Sistemas DinâmicosJefferson Gomes Andrade DA SilvaAinda não há avaliações
- Métodos da rigidez e flexibilidadeDocumento14 páginasMétodos da rigidez e flexibilidadeCezar DantasAinda não há avaliações
- Notas de Aula - EnG 114Documento98 páginasNotas de Aula - EnG 114FabricioAinda não há avaliações
- Aula 05 MS2Documento12 páginasAula 05 MS2Armando BelarminoAinda não há avaliações
- Teoria das Estruturas II - Bibliografia e Deformações em Estruturas IsostáticasDocumento65 páginasTeoria das Estruturas II - Bibliografia e Deformações em Estruturas IsostáticasGláucio Ribeiro0% (1)
- Controle1_Técnicas de resposta em frequênciaDocumento32 páginasControle1_Técnicas de resposta em frequênciatressoengenhariaAinda não há avaliações
- TrelicasDocumento56 páginasTrelicassidneysardinha7Ainda não há avaliações
- Aula 3 - TreliçasDocumento35 páginasAula 3 - TreliçasMaycon OliveiraAinda não há avaliações
- Estabilidade e controleDocumento5 páginasEstabilidade e controleBruno MotteraniAinda não há avaliações
- AULA 01_Introducao AEDocumento59 páginasAULA 01_Introducao AECastene MendesAinda não há avaliações
- Resumo JAI Projeto de Pesquisa Trelica EspacialDocumento5 páginasResumo JAI Projeto de Pesquisa Trelica EspacialBruna Moro DruzianAinda não há avaliações
- TCC DIVA2 A Capoeira Na EducacaoDocumento28 páginasTCC DIVA2 A Capoeira Na EducacaoEdy BastosAinda não há avaliações
- Imersaiiì - o PDF 003 PDFDocumento208 páginasImersaiiì - o PDF 003 PDFKeila Pereira Ipe PereiraAinda não há avaliações
- Capital Fetiche - IamamotoDocumento24 páginasCapital Fetiche - IamamotoSula Morais100% (1)
- Guiando o AutoconhecimentoDocumento33 páginasGuiando o AutoconhecimentoThiago Neves0% (2)
- Mapas Mentais VitaminasDocumento21 páginasMapas Mentais VitaminasgleicianaquaresmanutriAinda não há avaliações
- Análise da estrutura de pensamento em uma clínica filosóficaDocumento88 páginasAnálise da estrutura de pensamento em uma clínica filosóficaRosemiro SefstromAinda não há avaliações
- CONTESTAÇÃO DE REINTEGRAÇÃO DE POSSEDocumento7 páginasCONTESTAÇÃO DE REINTEGRAÇÃO DE POSSEEliézer SousaAinda não há avaliações
- Procedimento de Gestão de Certificação de Acesso por CordaDocumento33 páginasProcedimento de Gestão de Certificação de Acesso por CordaRael Zorzo MichelsAinda não há avaliações
- Advertência Na Transação Penal PDFDocumento24 páginasAdvertência Na Transação Penal PDFPablo FernandesAinda não há avaliações
- Paulo Dantas PDFDocumento175 páginasPaulo Dantas PDFGSGTUFGHCTGUTGHBUD0% (1)
- Feminilidade FreudDocumento5 páginasFeminilidade FreudPaula BettencourtAinda não há avaliações
- BACnet Client CLIMATEDocumento7 páginasBACnet Client CLIMATEWilliam SouzaAinda não há avaliações
- Roteiro Litúrgico da QuaresmaDocumento3 páginasRoteiro Litúrgico da QuaresmaAdriano SilvaAinda não há avaliações
- Paciência Deus - Heber CamposDocumento10 páginasPaciência Deus - Heber CamposJimmy Dantas0% (1)
- 1 Bebe Partitura PDFDocumento25 páginas1 Bebe Partitura PDFRicardo Richard100% (2)
- 5 Linguagens Do Amor - Parte 2Documento2 páginas5 Linguagens Do Amor - Parte 2degpbAinda não há avaliações
- Introdução À Gestão de RiscosDocumento23 páginasIntrodução À Gestão de RiscosjulianaAinda não há avaliações
- A importância do brincar para o aprendizado escolarDocumento1 páginaA importância do brincar para o aprendizado escolarRenata Fiorese FernandesAinda não há avaliações
- Guia para Uso de Linguagem SimplesDocumento18 páginasGuia para Uso de Linguagem SimplesemanolimaAinda não há avaliações
- Mini-Mental State Examination - ApresentaçãoDocumento17 páginasMini-Mental State Examination - ApresentaçãoFrancisco RachinasAinda não há avaliações
- Metodologia para Análise de Regurgitações de Coruja-Das-TorresDocumento10 páginasMetodologia para Análise de Regurgitações de Coruja-Das-TorresJosé Carlos MoraisAinda não há avaliações
- ATF - Adicao Do Item 23 - Devolucao Na Baixa de Ativo Fixo - CIAP - TFFRYCDocumento4 páginasATF - Adicao Do Item 23 - Devolucao Na Baixa de Ativo Fixo - CIAP - TFFRYCAlessandre MarcelinoAinda não há avaliações
- 193 366 1 PBDocumento11 páginas193 366 1 PBCamilaNeitzkeAinda não há avaliações
- O Doido e A MortDocumento1 páginaO Doido e A MortInês MarquesAinda não há avaliações
- TJRS 46970Documento394 páginasTJRS 46970Maiara Lazarin SampaioAinda não há avaliações
- Como fazer flechas para arco primitivoDocumento8 páginasComo fazer flechas para arco primitivoUmberto GuariseAinda não há avaliações
- Peb Processo de Estudo BiblicoDocumento21 páginasPeb Processo de Estudo BiblicoAdenildo Santos da SilvaAinda não há avaliações
- Ebook - Que Charada Esconde A Bicharada Vol 1Documento19 páginasEbook - Que Charada Esconde A Bicharada Vol 1Lindaura Eleuterio100% (1)
- Plano Curricular Português 6o AnoDocumento2 páginasPlano Curricular Português 6o AnoCarina FerreiraAinda não há avaliações
- Folheto TRICOMONÍASEDocumento2 páginasFolheto TRICOMONÍASEslcteleconAinda não há avaliações
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsAinda não há avaliações
- Boundary Element Methods: Principles and ApplicationsNo EverandBoundary Element Methods: Principles and ApplicationsQ. DuAinda não há avaliações
- The Finite Element Method: Fundamentals and Applications in Civil, Hydraulic, Mechanical and Aeronautical EngineeringNo EverandThe Finite Element Method: Fundamentals and Applications in Civil, Hydraulic, Mechanical and Aeronautical EngineeringAinda não há avaliações
- Electromagnetic Well Logging: Models for MWD / LWD Interpretation and Tool DesignNo EverandElectromagnetic Well Logging: Models for MWD / LWD Interpretation and Tool DesignNota: 5 de 5 estrelas5/5 (1)
- The Finite Element Method: Linear Static and Dynamic Finite Element AnalysisNo EverandThe Finite Element Method: Linear Static and Dynamic Finite Element AnalysisNota: 5 de 5 estrelas5/5 (3)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsAinda não há avaliações
- Numerical and Computer Methods in Structural MechanicsNo EverandNumerical and Computer Methods in Structural MechanicsSteven J. FenvesAinda não há avaliações
- Finite Elements for Analysis and Design: Computational Mathematics and Applications SeriesNo EverandFinite Elements for Analysis and Design: Computational Mathematics and Applications SeriesNota: 5 de 5 estrelas5/5 (1)
- Computation of Nonlinear Structures: Extremely Large Elements for Frames, Plates and ShellsNo EverandComputation of Nonlinear Structures: Extremely Large Elements for Frames, Plates and ShellsAinda não há avaliações
- Energy Principles and Variational Methods in Applied MechanicsNo EverandEnergy Principles and Variational Methods in Applied MechanicsAinda não há avaliações
- Essentials of the Finite Element Method: For Mechanical and Structural EngineersNo EverandEssentials of the Finite Element Method: For Mechanical and Structural EngineersNota: 3.5 de 5 estrelas3.5/5 (9)
- Probabilistic Finite Element Model Updating Using Bayesian Statistics: Applications to Aeronautical and Mechanical EngineeringNo EverandProbabilistic Finite Element Model Updating Using Bayesian Statistics: Applications to Aeronautical and Mechanical EngineeringAinda não há avaliações
- Variational Methods in Nuclear Reactor PhysicsNo EverandVariational Methods in Nuclear Reactor PhysicsWeston M. Jr. StaceyAinda não há avaliações
- Computational Electromagnetism: Variational Formulations, Complementarity, Edge ElementsNo EverandComputational Electromagnetism: Variational Formulations, Complementarity, Edge ElementsAinda não há avaliações
- Thermo-Mechanical Modeling of Additive ManufacturingNo EverandThermo-Mechanical Modeling of Additive ManufacturingMichael GougeAinda não há avaliações
- Introduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationNo EverandIntroduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationAinda não há avaliações
- Isogeometric Analysis: Toward Integration of CAD and FEANo EverandIsogeometric Analysis: Toward Integration of CAD and FEAAinda não há avaliações
- ANSYS Mechanical APDL for Finite Element AnalysisNo EverandANSYS Mechanical APDL for Finite Element AnalysisNota: 4.5 de 5 estrelas4.5/5 (8)