Universidade de São Paulo
Instituto de Fı́sica de São Carlos
7600018 – Mec^
anica Clássica
^
MECANICA CLÁSSICA
– Lista Avaliativa 3 –
– Grupo 01 –
Henrique Gomes Pinto – 10348998
Inara Yasmin Donda Acosta – 11811089
João Victor Alcantara Pimenta – 11820812
Leonardo Rodrigues Giacomello – 11810943
Matheus José Ferreira – 11908483
14 de dezembro de 2022
�Questão 3.01
A água em um container girante de raio 50𝑚𝑚 está 30𝑚𝑚 mais baixa no centro (𝑟 = 0) do que na borda.
Encontre a velocidade angular do container, considerando 𝑔 = 9, 81𝑚/𝑠 2
Resolução:
1
�Questão 3.02
Um pássaro de 2𝑘𝑔 está voando com velocidade de 10𝑚/𝑠 na latitude 60∘ ao norte, indo na direção leste.
Encontre as componentes horizontal e vertical da força de Coriolis atuando nele.
Resolução:
2
�Questão 3.03
Considere um cone rodando sem deslizar sobre uma mesa. O ^ angulo de abertura do cone é 2𝛼, e sua altura é ℎ.
A velocidade do ponto 𝑃 , o ponto central de sua base, é 𝑣 . Qual a velocidade angular desse cone no referencial
do laboratório? Qual a velocidade relacionada à rotação da base?
Resolução:
3
�Questão 3.04
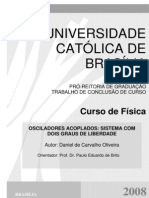
Tr^es partı́culas id^enticas, conectadas por molas também id^enticas, estão limitadas à um movimento circular por
um anel. Ache os modos normais de vibração, tomando 𝑚 como sendo a massa das partı́culas e 𝑘 as constantes
elásticas das molas do sistema.
Resolução:
De acordo com as descrições do problema, somos capazes de construir figurativamente a representação do sistema
apresentado conforme a imagem a seguir:
Figura 1: Representação esquemática do sistema descrito no enunciado do problema.
Para que sejamos capazes de encontrar os modos normais de vibração do conjunto, precisamos antes definir quais
são as equações de movimento associadas a cada uma das massas. Com isso em mente, sabendo que o sistema é
puramente unidimensional, consideremos então o seguinte sistema de equações diferenciais:
⎧ ..
⎪
⎪
⎪ 𝑚𝑥1 = −𝑘(𝑥1 − 𝑥2 ) − 𝑘(𝑥1 − 𝑥3 )
⎪
⎪
..
⎨
𝑚𝑥2 = −𝑘(𝑥2 − 𝑥3 ) − 𝑘(𝑥2 − 𝑥1 ) (1)
⎪
⎪
⎩𝑚..
⎪
⎪
𝑥3 = −𝑘(𝑥3 − 𝑥1 ) − 𝑘(𝑥3 − 𝑥2 )
⎪
Nesse caso, os elementos em par^enteses que acompanham as constantes de mola representam as distensões com
respeito aos pontos de equilı́brio de cada uma das partı́culas, ou seja, as distensões com respeito às posições 𝑥1 , 𝑥2
e 𝑥3 . Além disso, como os termos 𝑘 presentes em cada uma das equações são iguais, podemos rearranjá-las de uma
forma mais conveniente:
.. ..
𝑚𝑥1 = −𝑘(𝑥1 − 𝑥2 ) − 𝑘(𝑥1 − 𝑥3 ) −→ 𝑚𝑥1 + 𝑘(2𝑥1 − 𝑥2 − 𝑥3 ) = 0
.. ..
𝑚𝑥2 = −𝑘(𝑥2 − 𝑥3 ) − 𝑘(𝑥2 − 𝑥1 ) −→ 𝑚𝑥2 + 𝑘(2𝑥2 − 𝑥3 − 𝑥1 ) = 0 (2)
.. ..
𝑚𝑥3 = −𝑘(𝑥3 − 𝑥1 ) − 𝑘(𝑥3 − 𝑥2 ) −→ 𝑚𝑥3 + 𝑘(2𝑥3 − 𝑥1 − 𝑥2 ) = 0
..
Como vemos, temos tr^es equações que nos remetem à algo da forma 𝑚𝑥 + 𝑘𝑥 = 0, ou seja, à equações usuais de
oscilador harm^
onico. Seguindo o procedimento usual, podemos dividir todos os termos das relações reformuladas por
𝑚, o que nos deixa portanto com: ⎧
.. 𝑘
⎪𝑥1 + (2𝑥1 − 𝑥2 − 𝑥3 ) = 0
⎪
⎪
⎪
⎪
⎪
⎪ 𝑚
⎪
⎪
.. 𝑘
⎨
𝑥2 + (2𝑥2 − 𝑥3 − 𝑥1 ) = 0 (3)
⎪
⎪
⎪ 𝑚
⎪
⎪
.. 𝑘
⎪
⎪
(2𝑥3 − 𝑥1 − 𝑥2 ) = 0
⎪
⎩𝑥3 +
⎪
𝑚
4
�Dada essa alteração, podemos reescrever os quocientes 𝑘/𝑚 como o quadrado da frequ^encia angular, ou seja,
𝑘/𝑚 = 𝜔 2 e, fora isso, utilizar uma proposta de solução para cada equação que seja da forma 𝑥𝑛 (𝑡) = 𝐴𝑛 𝑒 𝑖𝜉𝑡 , com
𝑛 = 1, 2, 3. Assim, teremos uma segunda derivada da posição da forma
..
𝑥𝑛 (𝑡) = 𝐴𝑛 𝑒 𝑖𝜉𝑡 =⇒ 𝑥𝑛 (𝑡) = −𝐴𝑛 𝜉2 𝑒 𝑖𝜉𝑡 ; 𝑛 = 1, 2, 3 (4)
que por sua vez nos define todos os termos necessários para aplicarmos nas equações e expandi-las da seguinte
maneira: ⎧
⎪
⎪
⎪ −𝐴1 𝜉2 𝑒 𝑖𝜉𝑡 + 𝜔 2 (2𝐴1 𝑒 𝑖𝜉𝑡 − 𝐴2 𝑒 𝑖𝜉𝑡 − 𝐴3 𝑒 𝑖𝜉𝑡 ) = 0
⎪
⎪
⎨
−𝐴2 𝜉2 𝑒 𝑖𝜉𝑡 + 𝜔 2 (2𝐴2 𝑒 𝑖𝜉𝑡 − 𝐴3 𝑒 𝑖𝜉𝑡 − 𝐴1 𝑒 𝑖𝜉𝑡 ) = 0 (5)
⎪
⎪
⎪
⎪
⎩−𝐴 𝜉2 𝑒 𝑖𝜉𝑡 +
⎪
𝜔 2 (2𝐴3 𝑒 𝑖𝜉𝑡 − 𝐴1 𝑒 𝑖𝜉𝑡 − 𝐴2 𝑒 𝑖𝜉𝑡 ) = 0
3
Evidenciando os termos exponenciais das parcelas em par^enteses:
⎧
2 𝑖𝜉𝑡 + 𝜔 2 (2𝐴1 − 𝐴2 − 𝐴3 )𝑒 𝑖𝜉𝑡 = 0
⎪−𝐴1 𝜉 𝑒
⎪
⎪
⎪
⎪
⎨
−𝐴2 𝜉2 𝑒 𝑖𝜉𝑡 + 𝜔 2 (2𝐴2 − 𝐴3 − 𝐴1 )𝑒 𝑖𝜉𝑡 = 0 (6)
⎪
⎪
⎪
⎪
⎩−𝐴 𝜉2 𝑒 𝑖𝜉𝑡 +
⎪
𝜔 2 (2𝐴3 − 𝐴1 − 𝐴2 )𝑒 𝑖𝜉𝑡 = 0
3
Convenientemente, temos que os termos exponenciais não serão relevantes para a resolução do sistema definido uma
vez que esses surgem associados a todos os elementos das igualdades, e portanto, ao dividirmos todas elas por 𝑒 𝑖𝜉𝑡 ,
eles desaparecerão sem nenhuma perda de generalidade. Com isso, podemos então agrupar as constantes 𝐴𝑛 e obter
a seguinte construção ⎧
⎪
⎪
⎪ (−𝜉2 + 2𝜔 2 )𝐴1 − 𝜔 2 𝐴2 − 𝜔 2 𝐴3 = 0
⎪
⎪
⎨
−𝜔 2 𝐴1 + (−𝜉2 + 2𝜔 2 )𝐴2 − 𝜔 2 𝐴3 = 0 (7)
⎪
⎪
⎪
⎪
⎩−𝜔 2 𝐴 − 𝜔 2 𝐴 + (−𝜉2 + 2𝜔 2 )𝐴 = 0
⎪
1 2 3
que pode ser representada de maneira mais simplificada pelo seguinte produto de matrizes:
⎡ ⎤⎡ ⎤ ⎡ ⎤
(−𝜉2 + 2𝜔 2 ) −𝜔 2 −𝜔 2 𝐴1 0
−𝜔 2 2
(−𝜉 + 2𝜔 ) 2 −𝜔 2
⎦ ⎣𝐴2 ⎦ = ⎣0⎦ (8)
⎢ ⎥⎢ ⎥ ⎢ ⎥
⎣
−𝜔 2 −𝜔 2 (−𝜉2 + 2𝜔 2 ) 𝐴3 0
Avaliando agora o determinante da matriz associada à 𝜔 e 𝜉, considerando em especial a situação em que esse é
nulo, somos capazes de obter a seguinte igualdade:
⃒ ⃒
⃒(−𝜉2 + 2𝜔 2 ) −𝜔 2 −𝜔 2 ⃒
⃒ ⃒
−𝜔 2 (−𝜉2 + 2𝜔 2 ) −𝜔 2 ⃒ = 0 =⇒ (−𝜉2 + 2𝜔 2 )3 − 3𝜔 4 (−𝜉2 + 2𝜔 2 ) − 2𝜔 6 = 0 (9)
⃒ ⃒
⃒
⃒
⃒ −𝜔 2 −𝜔 2 2
(−𝜉 + 2𝜔 )⃒2 ⃒
Em um primeiro momento, a expressão encontrada pode parecer extremamente complexa de ser solucionada para 𝜉,
contudo, caso realizemos uma expansão em todos os termos, poderemos simplificá-la a nosso favor. Assim, temos:
[−𝜉6 + 6𝜉4 𝜔 2 − 12𝜉2 𝜔 4 + 8𝜔 6 ] + [−3𝜔 4 𝜉2 + 6𝜔 6 ] − 2𝜔 6 = 0 (10)
Rearranjando os termos equivalentes e fazendo as devidas simplificações, somos capazes de obter a seguinte expressão:
− 𝜉6 + 6𝜉4 𝜔 2 − 9𝜉2 𝜔 4 = 0 (11)
Evidenciando −𝜉2 , somos capazes de encontrar uma relação mais compacta para o termo restante, ou seja
− 𝜉6 + 6𝜉4 𝜔 2 − 9𝜉2 𝜔 4 = 0 −→ −𝜉2 (𝜉4 − 6𝜉2 𝜔 2 + 9𝜔 4 ) = 0 (12)
5
�em que 𝜉4 − 6𝜉2 𝜔 2 + 9𝜔 4 pode ser reescrito como (𝜉2 − 3𝜔 2 )2 , o que nos permite enfim realizar uma análise direta
dos possı́veis resultados associados às raı́zes do polin^
omio definido:
⎧ {︃
⎪
⎪ 𝜉1 = 0
𝜉2 = 0 =⇒
⎪
⎪
𝜉2 = 0
⎪
⎪
⎪
⎨
2 2 2 2
− 𝜉 (𝜉 − 3𝜔 ) = 0 ⇐⇒ (13)
⎪ {︃ √
𝜉3 = 𝜔 √ 3
⎪
⎪
⎪𝜉2 = 3𝜔 2 =⇒
⎪
𝜉4 = 𝜔 3
⎪
⎪
⎩
Assim, com esses resultados definidos, podemos retornar à expressão matricial construı́da em (8) e encontrarmos os
modos normais do sistema:
• Resolução do sistema matricial para 𝜉 = 0:
Aplicando 𝜉2 = 0 na matriz indicada anteriormente, obtemos algo da forma:
⎡ ⎤⎡ ⎤ ⎡ ⎤
2𝜔 2 −𝜔 2 −𝜔 2 𝐴1 0
⎢ 2
⎣−𝜔 2𝜔 2 −𝜔 2 ⎦ ⎣𝐴2 ⎦ = ⎣0⎦ (14)
⎥⎢ ⎥ ⎢ ⎥
−𝜔 2 −𝜔 2 2𝜔 2 𝐴3 0
Solucionando o produto de matrizes e retomando a formulação de sistema, obtemos algo da forma
⎧
2 2 2
⎪ 2𝜔 𝐴1 − 𝜔 𝐴2 − 𝜔 𝐴3
⎪
⎪ = 0
⎪
⎪
⎨
−𝜔 2 𝐴1 + 2𝜔 2 𝐴2 − 𝜔 2 𝐴3 = 0 (15)
⎪
⎪
⎪
⎪
⎩−𝜔 2 𝐴 − 𝜔 2 𝐴 + 2𝜔 2 𝐴
⎪
= 0
1 2 3
que por sua vez nos retorna, de imediato, uma solução trivial da forma 𝐴1 = 𝐴2 = 𝐴3 = 0, que não deve ser
considerada pois definiria todas as possı́veis amplitudes de oscilação do conjunto vinculado como inexistentes,
o que não nos convém aqui. Para encontrarmos uma solução coerente, rearranjemos os elementos de cada
equação da seguinte forma: ⎧
⎪
⎪
⎪ 𝜔 2 (2𝐴1 − 𝐴2 − 𝐴3 ) = 0
⎪
⎪
⎨
𝜔 2 (2𝐴2 − 𝐴1 − 𝐴3 ) = 0 (16)
⎪
⎪
⎪
⎪
⎩𝜔 2 (2𝐴 − 𝐴 − 𝐴 ) = 0
⎪
3 1 2
Aqui, vemos então que uma solução possı́vel e não trivial corresponde à 𝐴1 = 𝐴2 = 𝐴3 , pois isso configuraria
uma relação da forma 𝜔 2 (2𝐴 − 𝐴 − 𝐴) = 0.
√
• Resolução do sistema matricial para 𝜉 = 𝜔 3:
Aplicando 𝜉2 = 3𝜔 2 na matriz construı́da ao longo da questão, obtemos:
⎡ ⎤⎡ ⎤ ⎡ ⎤
(−3𝜔 2 + 2𝜔 2 ) −𝜔 2 −𝜔 2 𝐴1 0
−𝜔 2 (−3𝜔 2 + 2𝜔 2 ) −𝜔 2 𝐴 = ⎣0⎦ (17)
⎢ ⎥⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ 2⎦
−𝜔 2 −𝜔 2 2
(−3𝜔 + 2𝜔 ) 2 𝐴3 0
Solucionando o produto de matrizes e retomando a formulação de sistema, obtemos algo da forma
⎧
⎪
⎪
⎪ (−3𝜔 2 + 2𝜔 2 )𝐴1 − 𝜔 2 𝐴2 − 𝜔 2 𝐴3 = 0
⎪
⎪
⎨
−𝜔 2 𝐴1 + (−3𝜔 2 + 2𝜔 2 )𝐴2 − 𝜔 2 𝐴3 = 0 (18)
⎪
⎪
⎪
⎪
⎩−𝜔 2 𝐴 − 𝜔 2 𝐴 + (−3𝜔 2 + 2𝜔 2 )𝐴 =
⎪
0
1 2 3
6
�Questão 3.05
Uma partı́cula de massa 𝑚 encontra-se em repouso no topo de uma semiesfera fixa e suave (sem atrito) de raio
𝑎. Encontre a força de vı́nculo associada ao sistema e, além disso, determine o ^
angulo em que a partı́cula sai da
superfı́cie da semiesfera.
Resolução:
7
�Questão 3.06
Um p^endulo de comprimento ℓ e massa 𝑚 está preso a um bloco de massa 𝑀. O bloco é livre para se mover
sem atrito ao longo de um trilho horizontal. Considere a posição 𝑦 = 0 (𝜃 = 𝜋/2) como sendo o zero da energia
potencial gravitacional. A aceleração da gravidade é 𝑔.
a) Escreva a lagrangiana do sistema em termos das coordenadas generalizadas 𝑥 (posição do bloco) e 𝜃 (o
^
angulo que o p^endulo faz com a vertical). Encontre as equações de movimento.
b) Além da energia mec^
anica total, existe alguma outra constante de movimento na din^
amica do sistema? Qual?
Justifique.
c) Considerando um regime de pequenas oscilações (𝜃 ≪ ℓ), encontre o modo normal de oscilação do sistema
e sua frequ^encia.
. .
d) Além do caso trivial no qual o sistema está parado (𝑥 = 0, 𝜃 = 0), existe algum outro movimento possı́vel
em que o p^endulo não oscile? Qual? Justifique.
Resolução:
• Item a)
Considerando as descrições do problema, somos capazes de representar o sistema fı́sico tratado como na figura
fixada imediatamente abaixo.
Figura 2: Representação imagética do sistema descrito no enunciado do problema em questão.
Para que sejamos capazes de definir a lagrangiana do sistema em termos das coordenadas generalizadas 𝑥 e 𝜃,
temos que entender quais serão os componentes do conjunto que contribuirão ativamente para a configuração
energética do mesmo.
L = 𝑇 − 𝑉 (19)
Aqui, os únicos objetos que se movem e, consequentemente, possuem uma energia cinética são o bloco de
massa 𝑀, que é livre para deslizar sem atrito sobre o trilho horizontal, e a partı́cula de massa 𝑚 fixa na
extremidade do p^endulo, que é capaz de oscilar restrita a um plano definido. O termo potencial, por sua vez,
será dado única e exclusivamente pelo potencial gravitacional da massa no p^endulo, e a razão disso reside nas
próprias considerações do problema. Assim, com esses detalhes postos, temos:
– Termos de Energia Cinética:
Aqui, a energia cinética 𝑇 será dada pela soma das energias cinéticas do bloco e do p^endulo, e portanto,
sabendo que o primeiro se move somente em uma dimensão e que o segundo oscila em duas dimensões,
teremos:
1 .2 . 1 .2
𝑇 = 𝑚(𝑥𝑚 + 𝑦 2 ) + 𝑀 𝑥𝑀 (20)
2 2
8
� Como o pendulo está conectado ao bloco, a componente horizontal 𝑥𝑚 do mesmo deve levar em conta tanto
a dist^ancia horizontal fixa dada pela haste de comprimento ℓ quanto qualquer deslocamento horizontal do
próprio bloco de massa 𝑀 a partir da origem, o que nos permite reescrever tal variável em termos de 𝑥𝑀 ,
ℓ e 𝜃. Da mesma forma, podemos efetuar mais uma projeção sobre os eixos ordenados e reescrever 𝑦 em
termos de ℓ e 𝜃, o que nos deixa com as duas seguintes variáveis
𝑥𝑚 (𝑡) = 𝑥𝑀 (𝑡) + ℓ sin(𝜃) ; 𝑦 (𝑡) = ℓ cos(𝜃) (21)
sendo que o sinal negativo da componente vertical surge devido ao próprio arranjo do nosso referencial.
Buscando agora as derivadas temporais desses termos redefinidos, encontramos
. . . . .
𝑥𝑚 (𝑡) = 𝑥𝑀 (𝑡) + ℓ𝜃 cos(𝜃) ; 𝑦 (𝑡) = ℓ𝜃 sin(𝜃) (22)
que enfim nos permitem reescrever a equação de energia cinética vista anteriormente, com respeito às
coordenadas generalizadas 𝑥 e 𝜃 solicitadas, da seguinte forma
1 .2 . . . . 1 .
𝑇 = 𝑚[𝑥𝑀 + 2𝑥𝑀 ℓ𝜃 cos(𝜃) + ℓ2 𝜃2 cos2 (𝜃) + ℓ2 𝜃2 sin2 (𝜃)] + 𝑀 𝑥𝑀 2 (23)
2 2
podendo ser ainda simplificada uma última vez pelo rearranjo dos termos trigonométricos em comum e
através da condição sin2 (𝜃) + cos2 (𝜃) = 1:
1 .2 . . . 1 .2
𝑇 = 𝑚[𝑥𝑀 + 2𝑥𝑀 ℓ𝜃 cos(𝜃) + ℓ2 𝜃2 ] + 𝑀 𝑥𝑀 (24)
2 2
– Termos de Energia Potencial:
Tratando agora da energia potencial, temos que nos preocupar com apenas um único termo: o da energia
potencial gravitacional vinculada ao pendulo. Isso se dá pois, pelas próprias definições da questão, somos
capazes de fixar uma linha equipotencialmente nula que transpassa o centro de massa do bloco, o que
nos permite reduzir nossas análises e afirmar que tal corpo não contribuirá para a definição da energia
potencial do conjunto. Além disso, como aquela região é dada como o zero de potencial, tudo acima (na
direção crescente de 𝑦 ) será positivo, e tudo abaixo (na direção decrescente de 𝑦 ) será negativo. Com
isso em mente, somos capazes então de construir a seguinte relação
𝑉 = −𝑚𝑔ℎ (25)
na qual a altura ℎ (ou simplesmente a dist^
ancia da extremidade do p^endulo à origem do nosso referencial)
pode ser reescrita em termos de ℓ e 𝜃 através da decomposição ℓ cos(𝜃), o que nos permite reescrever a
expressão acima como:
𝑉 = −𝑚𝑔ℓ cos(𝜃) (26)
Com essas duas análises concluı́das, podemos então retornar à expressão para L e substituir todos os dados
encontrados em termos das coordenadas generalizadas 𝑥 e 𝜃, o que nos deixa com:
1 .2 . . . 1 .2
L = 𝑚[𝑥𝑀 + 2𝑥𝑀 ℓ𝜃 cos(𝜃) + ℓ2 𝜃2 ] + 𝑀 𝑥𝑀 + 𝑚𝑔ℓ cos(𝜃) (27)
2 2
Evidenciando os termos em comum e simplificando os restantes, podemos reduzir nossa lagrangiana para uma
forma mais convidativa, o que por sua vez configura a solução desse primeiro item do problema.
1 .2 1 . . .
L = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ2 𝜃2 + 𝑚ℓ𝑥𝑀 𝜃 cos(𝜃) + 𝑚𝑔ℓ cos(𝜃) (28)
2 2
• Item b)
Nesse caso, para que sejamos capazes de estudar as constantes de movimento do sistema, devemos construir
as equações de Euler-Lagrange para cada uma das coordenadas explicitadas no item anterior, uma vez que tais
relações definirão a 2º Lei de Newton em sua forma generalizada. Dito isso, temos:
9
� – Equação de Euler-Lagrange para 𝑥:
(︂ )︂
𝜕L 𝑑 𝜕L
− . = 0 (29)
𝜕𝑥 𝑑𝑡 𝜕𝑥
Aplicando a definição de L encontrada em (28) na equação acima, somos capazes de perceber que a
derivada com respeito à 𝑥 será nula, uma vez que não existem termos na lagrangiana que dependem da
.
posição, mas somente de sua derivada. Com isso, podemos nos centrar somente em encontrar 𝜕L /𝜕 𝑥:
𝜕L . .
. = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ𝜃 cos(𝜃) (30)
𝜕𝑥
Da teoria, sabemos que o termo encontrado representa o momento generalizado sobre a coordenada 𝑥,
ou seja, 𝑝𝑥 . Aqui, pelo fato de sua derivada temporal ser nula juntamente com 𝜕L /𝜕𝑥, podemos definir
que 𝑝𝑥 é constante no tempo e, assim, uma constante de movimento do nosso problema.
.
(︂ )︂
𝑑 𝜕L . .
. = 𝑝𝑥 = 0 =⇒ 𝑝𝑥 = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ𝜃 cos(𝜃) é constante de movimento.
𝑑𝑡 𝜕 𝑥
– Equação de Euler-Lagrange para 𝜃:
(︂ )︂
𝜕L 𝑑 𝜕L
− . = 0 (31)
𝜕𝜃 𝑑𝑡 𝜕𝜃
Realizando um procedimento análogo ao do tópico anterior, temos que as duas derivadas da equação são
descritas da seguinte forma:
⎧
⎪ 𝜕L . .
⎪
⎪
⎨ 𝜕𝜃
⎪ = −𝑚ℓ 𝑥 𝑀 𝜃 sin(𝜃) − 𝑚𝑔ℓ sin(𝜃)
(32)
⎪
⎪ 𝜕L 2
. .
⎩ . = 𝑚ℓ 𝜃 + 𝑚ℓ𝑥𝑀 cos(𝜃)
⎪
⎪
𝜕𝜃
.
Uma vez mais, temos que a derivada da lagrangiana com respeito à variável 𝜃 se define como o momento
generalizado 𝑝𝜃 , o que nos permite reescrever a relação de Euler-Lagrange da seguinte maneira:
. . . . . .
− 𝑚ℓ𝑥𝑀 𝜃 sin(𝜃) − 𝑚𝑔ℓ sin(𝜃) − 𝑝𝜃 = 0 =⇒ 𝑝𝜃 = −𝑚ℓ𝑥𝑀 𝜃 sin(𝜃) − 𝑚𝑔ℓ sin(𝜃) (33)
Nesse caso, a derivada temporal do momento não é nula como anteriormente, o que por sua vez não
define o momento generalizado 𝑝𝜃 como uma segunda constante de movimento do sistema.
.
(︂ )︂
𝑑 𝜕L . .
. = 𝑝𝜃 ̸= 0 =⇒ 𝑝𝜃 = 𝑚ℓ2 𝜃 + 𝑚ℓ𝑥𝑀 cos(𝜃) não é constante de movimento.
𝑑𝑡 𝜕 𝜃
Com isso, temos então que além da energia mec^
anica total estabelecida pelo hamiltoniano
1 .2 1 . . .
𝐻 = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ2 𝜃2 + 𝑚ℓ𝑥𝑀 𝜃 cos(𝜃) − 𝑚𝑔ℓ cos(𝜃) (34)
2 2
em uma relação da forma 𝐻 = 𝑇 + 𝑉 , uma outra constante de movimento
. presente no sistema é o momento
.
generalizado referente à coordenada 𝑥, ou seja, 𝑝𝑥 = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ𝜃 cos(𝜃).
• Item c)
Assumindo agora um regime de pequenas oscilações para o sistema analisado, podemos reescrever o lagrangiano
L antes encontrado a fim de corrigir os termos energéticos. Nesse caso, é importante compreendermos que
para ^
angulos pequenos, os termos trigonométricos usuais podem ser aproximados pelas seguintes relações
⎧
⎪
⎪ sin(𝜃) ≈ 𝜃
⎨
(35)
⎪ 𝜃2
⎩cos(𝜃) ≈ 1 −
⎪
2
10
�que nos exibem, em uma expansão em série de Taylor, que variações até segunda pot^encia tornam-se relevantes
(a função sin(𝜃), por ser ı́mpar, não apresenta nenhum termo de pot^encia par, e por conta disso, o restante
de expansão pode ser desconsiderada sem perda de generalidade por não contribuir o suficiente para qualquer
modificação relevante). Com isso definido, temos então que o funcional citado torna-se:
[︃ ]︃ [︃ ]︃
1 .2 1 2 .2 . . 𝜃2 𝜃2
L = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ 𝜃 + 𝑚ℓ𝑥𝑀 𝜃 1 − + 𝑚𝑔ℓ 1 − (36)
2 2 2 2
Realizando a distribuição dos elementos, encontramos:
1 .2 1 . . . 1 . . 1
L = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ2 𝜃2 + 𝑚ℓ𝑥𝑀 𝜃 − 𝑚ℓ𝑥𝑀 𝜃𝜃2 + 𝑚𝑔ℓ − 𝑚𝑔ℓ𝜃2 (37)
2 2 2 2
.
Aqui, o termo contendo o elemento 𝜃𝜃2 pode ser negligenciado, pois tal arranjo representa um fator angular
de terceira ordem, o que por sua vez não contribui suficientemente para nenhum dos nossos desenvolvimentos.
Desse modo, a relação se reescreve como
1 .2 1 . . . 1
L = 𝑥𝑀 (𝑚 + 𝑀) + 𝑚ℓ2 𝜃2 + 𝑚ℓ𝑥𝑀 𝜃 + 𝑚𝑔ℓ − 𝑚𝑔ℓ𝜃2 (38)
2 2 2
11
�Questão 3.07
Um leve fio inextensı́vel passa sobre uma leve polia e carrega uma massa 4𝑚 em uma ponta. A outra ponta
sustenta uma segunda polia leve, com outro fio similar sobre ela, que carrega uma massa 3𝑚 numa ponta e uma
massa 𝑚 na outra ponta. Usando um par de coordenadas generalizadas adequado, escreva a função de Lagrange
do sistema e as respectivas equações de Lagrange. Além disso, encontre as acelerações das tr^es massas atreladas
ao sistema.
Resolução:
12
�Questão 3.08
Em certas situações, particularmente em sistemas unidimensionais, é possı́vel considerar efeitos friccionais sem
introduzir propriamente uma função de dissipação. Como exemplo, temos a seguinte lagrangiana:
(︃ . )︃
𝑚 𝑞 2 𝑘𝑞 2
L = 𝑒 𝛾𝑡 −
2 2
a) Encontre a equação de movimento dessa lagrangiana e verifique se há constantes de movimento.
b) Suponha a seguinte transformação:
𝑠 = 𝑒 𝛾𝑡 𝑞
Qual é a lagrangiana ”efetiva” do sistema em termos de 𝑠? Encontre a equação de movimento para 𝑠. O
que esses resultados dizem sobre as quantidades conservadas do sistema?
Resolução:
13
�Questão 3.09
Uma corda flexı́vel uniforme de densidade 𝜌 e tamanho fixo ℓ está suspensa por dois pontos de mesma altura.
Considere a gravidade como constante e igual à 𝑔 no sentido negativo de 𝑧.
a) Escreva as expressões para a energia potencial 𝑈 e para o comprimento ℓ, ambos associados a uma curva
𝑧 = 𝑧(𝑥) genérica.
b) Formule as equações de Euler-Lagrange (isto é, encontre as equações de movimento do sistema) para a curva
que minimiza o potencial, sujeito à condição de comprimento total fixo (note que será necessário utilizar os
multiplicadores de Lagrange).
c) Mostre que a solução das equações anteriores são dadas por 𝑧(𝑥) = 𝐴 cosh(𝐴/𝑥) + 𝐵 onde 𝐴 e 𝐵 são
constantes. Determine 𝑈 e ℓ para essas condições.
Resolução:
14
�Questão 3.10
O p^endulo cicloidal de Huygens consiste em uma configuração pendular associada a uma partı́cula capaz de
oscilar sob a ação da gravidade constante em um plano vertical delimitado por contornos de cicloide, que por
sua vez são parametrizados pelas seguintes equações
𝑥(𝜃) = 𝑅[𝜃 − sin(𝜃)]
𝑦 (𝜃) = 𝑅[1 − cos(𝜃)]
em que o eixo 𝑦 é definido para baixo. Nesse contexto, mostre que a lagrangiana do sistema é:
.
(︂ )︂
2 𝜃
L = 2𝑚𝑅 sin2
𝜃2 + 𝑚𝑔𝑅[1 − cos(𝜃)]
2
Fazendo a substituição 𝑢 = cos(𝜃/2), encontre
√︀ a lagrangiana e as equações de Lagrange em termos de 𝑢. Prova
que o perı́odo de oscilação é igual a 4𝜋 𝑅/𝑔, ou seja, independente da amplitude inicial 𝜃0 .
Resolução:
15