Você também pode gostar
- Biogeo11 Teste4Documento9 páginasBiogeo11 Teste4crisvit90% (10)
- Catálogo Neodent 2015Documento210 páginasCatálogo Neodent 2015Larissa Sestari100% (1)
- Gestão Da Conservação-Restauração Do Patrimônio Cultural Algumas Reflexões Sobre Teoria e PráticaDocumento10 páginasGestão Da Conservação-Restauração Do Patrimônio Cultural Algumas Reflexões Sobre Teoria e PráticaDébora LimaAinda não há avaliações
- ADE - Matemática - 3 Série Do Ensino MédioDocumento11 páginasADE - Matemática - 3 Série Do Ensino MédioCoordenação Allyrio BrasilAinda não há avaliações
- Pele - Facilitando AcupunturaDocumento2 páginasPele - Facilitando AcupunturaancarvalhoAinda não há avaliações
- Controle PIDDocumento80 páginasControle PIDBruno WilliansAinda não há avaliações
- Controle PIDDocumento17 páginasControle PIDubbi_wanAinda não há avaliações
- Resumo Controladores PID PDFDocumento4 páginasResumo Controladores PID PDFEloá BarãoAinda não há avaliações
- Aula 10 Simulink Sintonia PIDDocumento53 páginasAula 10 Simulink Sintonia PIDMarcio DiegoAinda não há avaliações
- PSC Pesquisa Métodos de Sintonia FinalDocumento32 páginasPSC Pesquisa Métodos de Sintonia FinalOtávio MottaAinda não há avaliações
- Controladores PIDDocumento26 páginasControladores PIDRejane BarbosaAinda não há avaliações
- Exercicios de Controle de ProcessosDocumento3 páginasExercicios de Controle de ProcessosCarlos EduardoAinda não há avaliações
- RELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETODocumento18 páginasRELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETORaniere LiraAinda não há avaliações
- 2171-Manuscript Paper - Texto Do Artigo (.PDF) - 10043-1-10-20161031Documento14 páginas2171-Manuscript Paper - Texto Do Artigo (.PDF) - 10043-1-10-20161031Maicon ZagonelAinda não há avaliações
- Apostila IFC ControladorDocumento9 páginasApostila IFC ControladorJBBARAinda não há avaliações
- Relatorio de COntrole Automatico - COntroladores PD, PI e PIDDocumento19 páginasRelatorio de COntrole Automatico - COntroladores PD, PI e PIDDiego YanezAinda não há avaliações
- Questionário CLP - Otávio MottaDocumento24 páginasQuestionário CLP - Otávio MottaOtávio MottaAinda não há avaliações
- Compensadores PIDDocumento22 páginasCompensadores PIDwerleyr.gAinda não há avaliações
- Controle - Tópico 1Documento9 páginasControle - Tópico 1kjonathas95Ainda não há avaliações
- Prova3 Partev1Documento11 páginasProva3 Partev1matheus AlmeidaAinda não há avaliações
- Controladores PIDDocumento29 páginasControladores PIDTiago BitencourtAinda não há avaliações
- Atividade Prática 1 (2021)Documento9 páginasAtividade Prática 1 (2021)gabi freitasAinda não há avaliações
- Sintonia de Controladores Ziegler NicholsDocumento13 páginasSintonia de Controladores Ziegler NicholssmctpirassunungaAinda não há avaliações
- Controladores PIDDocumento14 páginasControladores PIDmarceloenderleAinda não há avaliações
- Controle de Processos Industriais Parte 3Documento29 páginasControle de Processos Industriais Parte 3Marcos AraujoAinda não há avaliações
- Controle PID Discreto - Método de Ziegler-Nichols e ExercíciosDocumento7 páginasControle PID Discreto - Método de Ziegler-Nichols e ExercíciosRaniere LiraAinda não há avaliações
- Artigo - Controle Pid - Versao FinalDocumento12 páginasArtigo - Controle Pid - Versao FinalSemedo FernandoAinda não há avaliações
- Controlador PIDDocumento19 páginasControlador PIDWesley Henrique MacielAinda não há avaliações
- Controlador PID PDFDocumento19 páginasControlador PID PDFWesley Henrique MacielAinda não há avaliações
- Controlador de VelocidadeDocumento21 páginasControlador de VelocidadeDanteAinda não há avaliações
- Controlador PIDDocumento27 páginasControlador PIDcmgobboAinda não há avaliações
- Controle PidDocumento18 páginasControle PidMarcos KimizukaAinda não há avaliações
- LE3U - PLC - Analog - and - PID 2Documento3 páginasLE3U - PLC - Analog - and - PID 2rogerio francisco silvaAinda não há avaliações
- Tarefa 5Documento9 páginasTarefa 5Alex LopesAinda não há avaliações
- Arq 51Documento1 páginaArq 51Richard de Medeiros CastroAinda não há avaliações
- Controle de Luminosidade de LedDocumento10 páginasControle de Luminosidade de LedCamila A. CostaAinda não há avaliações
- Trabalho Final - Controle DigitalDocumento35 páginasTrabalho Final - Controle DigitalWesleyAinda não há avaliações
- Trabalho AcpDocumento9 páginasTrabalho AcpRomero Atala RhodaAinda não há avaliações
- Diagramade BLOCOSDocumento16 páginasDiagramade BLOCOSrannier07Ainda não há avaliações
- 4 FeedbackDocumento7 páginas4 FeedbackNk SantosAinda não há avaliações
- Aula 10 - PCC - Controladores de ProcessosDocumento18 páginasAula 10 - PCC - Controladores de ProcessosthaysAinda não há avaliações
- Controladores Automaticos IndustriaisDocumento7 páginasControladores Automaticos IndustriaisalcusatAinda não há avaliações
- Texto de Apoio.04. Sistemas de Comando e RegulacaoDocumento6 páginasTexto de Apoio.04. Sistemas de Comando e RegulacaoGonçalves Vasco NhantumboAinda não há avaliações
- A3 MatheusDocumento11 páginasA3 MatheusMatheus EduardoAinda não há avaliações
- Aula 2 - ANAL - sist.LINEARES - Classificação de Sistemas - Malha Aberta e Malha FechadaDocumento48 páginasAula 2 - ANAL - sist.LINEARES - Classificação de Sistemas - Malha Aberta e Malha FechadaMikael PaivaAinda não há avaliações
- Projeto de Controlador Pid: (Disciplina de Controle e Automação)Documento25 páginasProjeto de Controlador Pid: (Disciplina de Controle e Automação)Kevin AugustoAinda não há avaliações
- SC - Seminário 2bim - Gustavo EliseuDocumento23 páginasSC - Seminário 2bim - Gustavo EliseuRafael FredianiAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Aula - 6 (Controladores Na Automação)Documento24 páginasAula - 6 (Controladores Na Automação)barataaaaAinda não há avaliações
- Apostila Sistemas LinearesDocumento216 páginasApostila Sistemas LinearesSidinei tomasAinda não há avaliações
- Cap6 - EfeitosRealimentacao-ErrosDocumento32 páginasCap6 - EfeitosRealimentacao-Errosandr7figueir-143034Ainda não há avaliações
- Aula8 new2010II PDFDocumento15 páginasAula8 new2010II PDFandersonfranklinliveAinda não há avaliações
- Trab2 Capq2 SintoniaDocumento15 páginasTrab2 Capq2 SintoniaDiulie BornAinda não há avaliações
- Apostila - Modelagem de Sistemas Fisicos - Parte 04Documento8 páginasApostila - Modelagem de Sistemas Fisicos - Parte 04Anderson KumazawaAinda não há avaliações
- AT3 - 2023 - Accoes de ControleDocumento45 páginasAT3 - 2023 - Accoes de ControleNelton SigauqueAinda não há avaliações
- (Teoria de Controle) Projeto Sintonia de Controlador PIDDocumento27 páginas(Teoria de Controle) Projeto Sintonia de Controlador PIDLucasMoreiradeLacerdaAinda não há avaliações
- SERVOMEC - Aula 02 - Analise de Erro em Regime EstacionarioDocumento17 páginasSERVOMEC - Aula 02 - Analise de Erro em Regime Estacionariofelipe jaimeAinda não há avaliações
- Controle PID V1Documento43 páginasControle PID V1Marco OliveiraAinda não há avaliações
- ZIEGLER&NICHOLSDocumento9 páginasZIEGLER&NICHOLSFabrício SoaresAinda não há avaliações
- Controle de NívelDocumento12 páginasControle de NívelWelligton ResendeAinda não há avaliações
- Controle Ótimo De Sistemas Dinâmicos: Teoria AplicadaNo EverandControle Ótimo De Sistemas Dinâmicos: Teoria AplicadaAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Sintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPNo EverandSintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicAinda não há avaliações
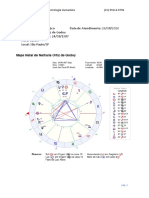
- Nathalia GodoyDocumento13 páginasNathalia GodoyNathália GodoyAinda não há avaliações
- Geografia - Diversidade ÉtnicaDocumento7 páginasGeografia - Diversidade ÉtnicaJosue felipe BarbosaAinda não há avaliações
- Alta Floresta Integrado Final MapaDocumento177 páginasAlta Floresta Integrado Final MapaGg GAinda não há avaliações
- Iguatu CeDocumento12 páginasIguatu CeGABRIELAinda não há avaliações
- Apostila de Jogos para SRMDocumento107 páginasApostila de Jogos para SRMHenrique J Reis BezerraAinda não há avaliações
- Lista de Exercícios - 22 - 10 - 22 UNIVERSALDocumento2 páginasLista de Exercícios - 22 - 10 - 22 UNIVERSALgiselle_azevedo29Ainda não há avaliações
- Cartilha Agroflorestal PDFDocumento92 páginasCartilha Agroflorestal PDFEliene OliveiraAinda não há avaliações
- Alexandre Ordem Paranormal Wiki FandomDocumento2 páginasAlexandre Ordem Paranormal Wiki FandomIevan polkaAinda não há avaliações
- Guião - ENPL 2014Documento1 páginaGuião - ENPL 2014daniel95sousaAinda não há avaliações
- Como Devemos Cultuar A DeusDocumento16 páginasComo Devemos Cultuar A DeusmarcoscotrimAinda não há avaliações
- Apostila Vida A DoisDocumento21 páginasApostila Vida A DoisAlex PessoaAinda não há avaliações
- As Idéias de EinsteinDocumento142 páginasAs Idéias de EinsteinFelipe00960% (1)
- Porque Emigram Os PortuguesesDocumento3 páginasPorque Emigram Os Portuguesesceliaestrada100% (1)
- Organização Pessoal ApresentaçãoDocumento25 páginasOrganização Pessoal ApresentaçãoMarcelo FernándezAinda não há avaliações
- Atividades CognitivasDocumento76 páginasAtividades CognitivasSimone Machado De OliveiraAinda não há avaliações
- Cap. 04 - Geometria, Ideias Intuitivas.Documento3 páginasCap. 04 - Geometria, Ideias Intuitivas.Douglas OliveiraAinda não há avaliações
- Guia Resistencia QuimicaDocumento4 páginasGuia Resistencia QuimicaAnonymous yX0AHnvCAinda não há avaliações
- Bolsas e Sapatos (20 Artigos)Documento30 páginasBolsas e Sapatos (20 Artigos)Maira SiqueiraAinda não há avaliações
- Modulo2 - Modulo de Resistencia A FlexaoDocumento13 páginasModulo2 - Modulo de Resistencia A FlexaoJéssika PauloAinda não há avaliações
- Aprendizagem - Teorias e ProcessosDocumento107 páginasAprendizagem - Teorias e ProcessosNeuropsico pedagogiaAinda não há avaliações
- Reflexao Do Pra Massagem FacialDocumento8 páginasReflexao Do Pra Massagem FacialCristina AlmeidaAinda não há avaliações
- Nº 03 - APR - ANÁLISE DE PREVENÇÃO DE RISCO Supressão Vegetal Com Utilização de MotosserraDocumento8 páginasNº 03 - APR - ANÁLISE DE PREVENÇÃO DE RISCO Supressão Vegetal Com Utilização de MotosserraMaicon KerwaldAinda não há avaliações
- Resina NanoparticuladaDocumento7 páginasResina NanoparticuladaWellington ReisAinda não há avaliações
- Planilha Orçamentária Da ObraDocumento2 páginasPlanilha Orçamentária Da ObraRoberval TelesAinda não há avaliações