Você também pode gostar
- 8.º Apont - Subespaço Vectorial - Intersecção, Reunião, Soma e Soma DirectaDocumento8 páginas8.º Apont - Subespaço Vectorial - Intersecção, Reunião, Soma e Soma DirectaAndrah SemedoAinda não há avaliações
- UnidadeIV - Aula09 - CalculoVect AlgaDocumento23 páginasUnidadeIV - Aula09 - CalculoVect AlgaWatho TwoclopAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
- Universidade Estadual Do Maranha O: Disciplina: Geometria Analítica e Álgebra Linear Professor: Geilson ReisDocumento2 páginasUniversidade Estadual Do Maranha O: Disciplina: Geometria Analítica e Álgebra Linear Professor: Geilson ReisOrielzo JuniorAinda não há avaliações
- Aula 8 - Espaços LinearesDocumento9 páginasAula 8 - Espaços LinearesDuarte PereiraAinda não há avaliações
- Vectores Rectas Planos 220134 2021 1Documento15 páginasVectores Rectas Planos 220134 2021 1Diego Ignacio López NavarreteAinda não há avaliações
- Lista de Exercícios de Matemática IDocumento49 páginasLista de Exercícios de Matemática IMagnus KellyAinda não há avaliações
- Ficha Pratica 1 FIS I - Valoi 23Documento3 páginasFicha Pratica 1 FIS I - Valoi 23Walter MiguelAinda não há avaliações
- Ciências Econômicas: Álgebra Linear E Processos DinâmicosDocumento50 páginasCiências Econômicas: Álgebra Linear E Processos DinâmicosJeferson BrambattiAinda não há avaliações
- Vetores - 2Documento48 páginasVetores - 2Renildes FreitaAinda não há avaliações
- UnidadeIV Aula08 CalculoVectDocumento23 páginasUnidadeIV Aula08 CalculoVectHuda CamilAinda não há avaliações
- Unidade IV - Espaços VetoriaisDocumento13 páginasUnidade IV - Espaços VetoriaisMm1285Ainda não há avaliações
- Manual de Álgebra LinearDocumento131 páginasManual de Álgebra Linearjoasilainy1996Ainda não há avaliações
- Solução Sussekind 8.3Documento4 páginasSolução Sussekind 8.3Renan OliveiraAinda não há avaliações
- Lista Aula Ex1.1Documento3 páginasLista Aula Ex1.1MATEMÁTICA COM ALCÍ JUNIORAinda não há avaliações
- Espaços+vetoriaisDocumento2 páginasEspaços+vetoriaisBrayan Tschaen EwaldAinda não há avaliações
- Ficha 6 Trigonometria Funções Trigonométricas 2 12Documento6 páginasFicha 6 Trigonometria Funções Trigonométricas 2 12Miguel ReisAinda não há avaliações
- Ficha de Exercicios 3 Calculo IV ISPTEC 09-04-2022Documento3 páginasFicha de Exercicios 3 Calculo IV ISPTEC 09-04-2022Misael TeixeiraAinda não há avaliações
- AP1X AL 2020-2 GabaritoDocumento5 páginasAP1X AL 2020-2 GabaritoBarbaraAinda não há avaliações
- Álgebra Linear - Resumo - Espaço VetorialDocumento6 páginasÁlgebra Linear - Resumo - Espaço VetorialJetro DimitreAinda não há avaliações
- Aula 11 ADocumento2 páginasAula 11 AAraujo Portacio SaquemaAinda não há avaliações
- Apontamentos CalculoVectDocumento24 páginasApontamentos CalculoVectWatho TwoclopAinda não há avaliações
- Aula - Subespaços Vectoriais. Combinação Linear. ExercíciosDocumento3 páginasAula - Subespaços Vectoriais. Combinação Linear. ExercíciosMauro AbnnerAinda não há avaliações
- Aula 12ADocumento3 páginasAula 12AAraujo Portacio SaquemaAinda não há avaliações
- ÁLGEBRA I - Espaços Vetoriais e Transformações LinearesDocumento19 páginasÁLGEBRA I - Espaços Vetoriais e Transformações LinearesÍtalo NatanAinda não há avaliações
- Aula 2 - Produto Escalar e Produto VetorialDocumento11 páginasAula 2 - Produto Escalar e Produto VetorialRoberto Aguiar Silveira (BetoPGG)Ainda não há avaliações
- O Conjunto (, ,, ) Diz-Se Um Conjunto de Geradores Do Subespaço Ger (, ,, )Documento5 páginasO Conjunto (, ,, ) Diz-Se Um Conjunto de Geradores Do Subespaço Ger (, ,, )Duarte PereiraAinda não há avaliações
- Solucionário Do Livro de Teoria Das Estruturas IDocumento22 páginasSolucionário Do Livro de Teoria Das Estruturas IRenan OliveiraAinda não há avaliações
- Solução Sussekiind Questão 8.1Documento6 páginasSolução Sussekiind Questão 8.1Renan OliveiraAinda não há avaliações
- Solução 8.4 SusskindDocumento6 páginasSolução 8.4 SusskindRenan OliveiraAinda não há avaliações
- Trabalho 2 Álgebra Linear Arthur FernandesDocumento13 páginasTrabalho 2 Álgebra Linear Arthur Fernandesarthur.bernardiAinda não há avaliações
- Equações de Planos No EspaçoDocumento20 páginasEquações de Planos No Espaçomariapotter7Ainda não há avaliações
- Ficha de Ex Esp Vec - Prop ResDocumento17 páginasFicha de Ex Esp Vec - Prop ResTiago SilvaAinda não há avaliações
- Rodrigo Pena Teobaldo - 09 07 2023Documento5 páginasRodrigo Pena Teobaldo - 09 07 2023Rodrigo PenaAinda não há avaliações
- Vetores - Viés Algébrico - Unidade IIDocumento32 páginasVetores - Viés Algébrico - Unidade IIFelipe RomoliniAinda não há avaliações
- AP2 AL 2020 1 Gabarito.Documento4 páginasAP2 AL 2020 1 Gabarito.BarbaraAinda não há avaliações
- Trabalhodogetúlio em GrupoDocumento11 páginasTrabalhodogetúlio em GrupoLara LimaAinda não há avaliações
- AP3 Cálculo IIIDocumento2 páginasAP3 Cálculo IIIPedro BotelhoAinda não há avaliações
- Equações de PlanosDocumento4 páginasEquações de PlanosRubens Roseli De PaulaAinda não há avaliações
- Coordenadas BaricentricasDocumento6 páginasCoordenadas BaricentricasDenis MedeirosAinda não há avaliações
- Vetores-Dependência LinearDocumento18 páginasVetores-Dependência LinearolavodossantosstzAinda não há avaliações
- Final EletromagnetismoDocumento2 páginasFinal Eletromagnetismodaniel reisAinda não há avaliações
- #6-Equações de Planos No EspaçoDocumento27 páginas#6-Equações de Planos No EspaçoAfonso CanelhoAinda não há avaliações
- Aula 2 - Funções Vetoriais - Pra GravarDocumento13 páginasAula 2 - Funções Vetoriais - Pra GravarJuliene MonteiroAinda não há avaliações
- GAAL Aula1Documento40 páginasGAAL Aula1Luigi FalconiAinda não há avaliações
- Ficha de Apoio 11 ClaaseDocumento8 páginasFicha de Apoio 11 ClaaseIsac Joao BranquinhoAinda não há avaliações
- Lista 1 Geometria e ÁlgebraDocumento3 páginasLista 1 Geometria e ÁlgebraOrielzo JuniorAinda não há avaliações
- Lista 1 - Linear2 - 2019 - 2Documento5 páginasLista 1 - Linear2 - 2019 - 2João Vitor Delgado de SouzaAinda não há avaliações
- Gaal Espaços VetoriaisDocumento18 páginasGaal Espaços VetoriaisIgor Mendes ArantesAinda não há avaliações
- 1a. ProvaDocumento1 página1a. ProvaGeleandro SAinda não há avaliações
- Álgebra (A) - 2022.1Documento11 páginasÁlgebra (A) - 2022.1Pedro OliveiraAinda não há avaliações
- Lista 3 - SubespaçosDocumento4 páginasLista 3 - SubespaçosJosé VictorAinda não há avaliações
- 119283-Lista de Problemas de Álgebra Linear 2022.1Documento12 páginas119283-Lista de Problemas de Álgebra Linear 2022.1Gilmara SilvaAinda não há avaliações
- Funções Vetoriais - Aula 2.2024.1Documento7 páginasFunções Vetoriais - Aula 2.2024.1Kidis GraçaAinda não há avaliações
- Slides Sobre Subespaço VetorialDocumento8 páginasSlides Sobre Subespaço VetorialMunikeMelgaçoAinda não há avaliações
- 10 ClasseDocumento7 páginas10 ClasseFilimone Thumbo100% (2)
- Trans 2Documento28 páginasTrans 2pedrofrancischetoAinda não há avaliações
- Algebra Linear e Geometria AnaliticaDocumento13 páginasAlgebra Linear e Geometria AnaliticaRendrinho FranciscoAinda não há avaliações
- Aula 26032020Documento1 páginaAula 26032020FAUSTOAinda não há avaliações
- SPDS Teste1 2016 2017 UnicvDocumento1 páginaSPDS Teste1 2016 2017 UnicvFAUSTOAinda não há avaliações
- Antenas ER 2017Documento1 páginaAntenas ER 2017FAUSTOAinda não há avaliações
- 05 Antenas ArrayDocumento119 páginas05 Antenas ArrayFAUSTOAinda não há avaliações
- Antenas ParametrosFundamentaisDocumento38 páginasAntenas ParametrosFundamentaisFAUSTOAinda não há avaliações
- Aula 02042020Documento1 páginaAula 02042020FAUSTOAinda não há avaliações
- SPDS Teste2 2015 2016 Unicv PDFDocumento1 páginaSPDS Teste2 2015 2016 Unicv PDFFAUSTOAinda não há avaliações
- SPDS Teste1B 2016 2017 Unicv PDFDocumento1 páginaSPDS Teste1B 2016 2017 Unicv PDFFAUSTOAinda não há avaliações
- PDS 1chamada 2020 2021 Unicv PDFDocumento1 páginaPDS 1chamada 2020 2021 Unicv PDFFAUSTOAinda não há avaliações
- RelatórioDocumento7 páginasRelatórioFAUSTOAinda não há avaliações
- ParametroFundamnetalExercicioPortugues PTDocumento34 páginasParametroFundamnetalExercicioPortugues PTFAUSTOAinda não há avaliações
- PartidaComInversao CadDocumento1 páginaPartidaComInversao CadFAUSTOAinda não há avaliações
- UntitledDocumento100 páginasUntitledFAUSTO100% (2)
- Partida Direta de Motor Trifásico - Sala Da ElétricaDocumento13 páginasPartida Direta de Motor Trifásico - Sala Da ElétricaFAUSTOAinda não há avaliações
- Automação Partida Direta Com Revers: - X L1 L2 L3 Pe - X LDocumento1 páginaAutomação Partida Direta Com Revers: - X L1 L2 L3 Pe - X LFAUSTOAinda não há avaliações
- RELATORIODOPROJETODocumento8 páginasRELATORIODOPROJETOFAUSTOAinda não há avaliações
- PDS 1teste 2020 2021 Unicv PDFDocumento1 páginaPDS 1teste 2020 2021 Unicv PDFFAUSTOAinda não há avaliações
- PartidaCInversao CadDocumento1 páginaPartidaCInversao CadFAUSTOAinda não há avaliações
- UntitledDocumento1 páginaUntitledFAUSTOAinda não há avaliações
- Automação Partida Direta Com Revers: - X L1 L2 L3 Pe - X LDocumento1 páginaAutomação Partida Direta Com Revers: - X L1 L2 L3 Pe - X LFAUSTOAinda não há avaliações
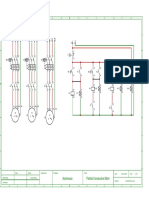
- 3motoressimu CadDocumento1 página3motoressimu CadFAUSTOAinda não há avaliações
- FacebookDocumento11 páginasFacebookFAUSTOAinda não há avaliações
- PDS Aula02 TransformadaFourierDocumento27 páginasPDS Aula02 TransformadaFourierFAUSTOAinda não há avaliações
- PDS Aula01 SerieFourierDocumento14 páginasPDS Aula01 SerieFourierFAUSTOAinda não há avaliações
- Ficha1 ConceitosFundamentaisDocumento4 páginasFicha1 ConceitosFundamentaisFAUSTOAinda não há avaliações
- ST-Aula7 - Acesso No Lacete LocalDocumento27 páginasST-Aula7 - Acesso No Lacete LocalFAUSTOAinda não há avaliações
- 1ºtesteDocumento6 páginas1ºtesteFAUSTOAinda não há avaliações
- 2º TesteDocumento8 páginas2º TesteFAUSTOAinda não há avaliações
- Universidade de Cabo Verde - DCTDocumento6 páginasUniversidade de Cabo Verde - DCTFAUSTOAinda não há avaliações
- 1ºtesteDocumento5 páginas1ºtesteFAUSTOAinda não há avaliações
- BioressonanciaDocumento18 páginasBioressonanciamarcos silvaAinda não há avaliações
- Noticias Diversas 3Documento565 páginasNoticias Diversas 3Elcio GeremiasAinda não há avaliações
- Halfway House Episode 8 Walkthrough - En.ptDocumento14 páginasHalfway House Episode 8 Walkthrough - En.ptVitor Akira Moreschi UenoAinda não há avaliações
- Tomografia Computadorizada Abordagem Dados Tecnicos Posicionamento Do UsuarioDocumento23 páginasTomografia Computadorizada Abordagem Dados Tecnicos Posicionamento Do UsuarioJuliana LeiteAinda não há avaliações
- CAPITULO II - Elementos Base Da Gestao Financeira A Analise FinanceiraDocumento53 páginasCAPITULO II - Elementos Base Da Gestao Financeira A Analise Financeirapantufas100% (1)
- Continuar Forte Sem FraquejarDocumento3 páginasContinuar Forte Sem FraquejarIsaias Gomes de OliveiraAinda não há avaliações
- (Aula 33) Administração ColonialDocumento6 páginas(Aula 33) Administração ColonialRenato Da CruzAinda não há avaliações
- MONOGRAFIA - Estudo de Caso para Implantação de VPN Na UnimontesDocumento8 páginasMONOGRAFIA - Estudo de Caso para Implantação de VPN Na Unimontesnutel maAinda não há avaliações
- Exercícios Probabilidade EstatDocumento6 páginasExercícios Probabilidade EstatNuno MarcosAinda não há avaliações
- Dario IIIDocumento2 páginasDario IIIjoaAinda não há avaliações
- Orações Espirituais de Guerra para Orar DiariamenteDocumento3 páginasOrações Espirituais de Guerra para Orar DiariamenteOdair OliveiraAinda não há avaliações
- A Farsa Dos Homens Sábios - João Soares SantosDocumento24 páginasA Farsa Dos Homens Sábios - João Soares SantosTONY FERNANDESAinda não há avaliações
- Emílio Santiago - Coisas Da PaixãoDocumento3 páginasEmílio Santiago - Coisas Da PaixãoNuma Key LumaAinda não há avaliações
- Sexualidade em FilmesDocumento231 páginasSexualidade em FilmesAleques EitererAinda não há avaliações
- Cultura Banto Traduzido P 2Documento1.176 páginasCultura Banto Traduzido P 2Demetrio Cesar Moura75% (4)
- A Instrução Agrícola e o Trabalho LivreDocumento66 páginasA Instrução Agrícola e o Trabalho LivreAndrea Lucia Silva LimaAinda não há avaliações
- SILVA - Mapa Mental Feminismo RadicalDocumento1 páginaSILVA - Mapa Mental Feminismo RadicalLaura BotossoAinda não há avaliações
- SARESPDocumento30 páginasSARESPGabriel Augusto JMAinda não há avaliações
- Ferramentas de InventárioDocumento2 páginasFerramentas de InventárioHerculano ArantesAinda não há avaliações
- 5 - A Revolucao Da Ternura Do Papa FranciscoDocumento1 página5 - A Revolucao Da Ternura Do Papa FranciscoMichelle Vitor dos Santos VichesiAinda não há avaliações
- Curso DerbakeDocumento33 páginasCurso DerbakeGustavo Pimenta67% (3)
- O MusicalDocumento8 páginasO MusicalKauã CastroAinda não há avaliações
- Arte Na Civilização EgeiaDocumento7 páginasArte Na Civilização EgeiaGabriel Baltazar WalkerAinda não há avaliações
- Pentecostais Migracao e Redes ReligiosasDocumento179 páginasPentecostais Migracao e Redes ReligiosasWanderson GabrielAinda não há avaliações
- Funcionalismo - Referência Histórica para o Design SocialDocumento9 páginasFuncionalismo - Referência Histórica para o Design SocialjessicarrsAinda não há avaliações
- A História Dos Problemas Da Tautócrona e Da BraquistócronaDocumento106 páginasA História Dos Problemas Da Tautócrona e Da BraquistócronaClaudio BorgesAinda não há avaliações
- A Fuga de Wang-Fô - Teste de Avaliação Formativa (Blog7 10-11)Documento3 páginasA Fuga de Wang-Fô - Teste de Avaliação Formativa (Blog7 10-11)Raquel Simões de AlmeidaAinda não há avaliações
- Historia Da AfricaDocumento4 páginasHistoria Da AfricaIsabella FrancoAinda não há avaliações
- Ambidestria OrganizacionalDocumento15 páginasAmbidestria OrganizacionalRobson F. BarbosaAinda não há avaliações
- Oferenda Ao Caboclo ArrancaDocumento27 páginasOferenda Ao Caboclo Arrancagorgon2Ainda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Ensinando Matemática Com Jogos: Possibilidades e PropostasNo EverandEnsinando Matemática Com Jogos: Possibilidades e PropostasNota: 5 de 5 estrelas5/5 (1)
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- A matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNo EverandA matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNota: 4.5 de 5 estrelas4.5/5 (5)
- Sincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.No EverandSincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.Nota: 5 de 5 estrelas5/5 (5)