Você também pode gostar
- PeakVue MIITDocumento4 páginasPeakVue MIITJoão Miguel Figueiredo FerreiraAinda não há avaliações
- Pratica 4 - Filtro Passa-FaixaDocumento13 páginasPratica 4 - Filtro Passa-FaixaAkillys FelipeAinda não há avaliações
- BM11Documento11 páginasBM11Paulo Vinícius MirandaAinda não há avaliações
- Curso de Vibraçao em Máquinas Rotativas CrticasDocumento66 páginasCurso de Vibraçao em Máquinas Rotativas Crticasrsleal100% (1)
- Análise de Vibração Aplicada em Máquinas Rotativas de Baixa VelocidadeDocumento13 páginasAnálise de Vibração Aplicada em Máquinas Rotativas de Baixa VelocidadeLuis Fonseca100% (1)
- Apoio Análise 1Documento87 páginasApoio Análise 1Willian LimaAinda não há avaliações
- 2 - Aula Filtros PassivosDocumento26 páginas2 - Aula Filtros PassivosWilliam Soares AlvesAinda não há avaliações
- Medidor de Vibração Digital Com RSDocumento5 páginasMedidor de Vibração Digital Com RSmarcosferreira2Ainda não há avaliações
- Manual Nk100Documento18 páginasManual Nk100Ivan DuranAinda não há avaliações
- Filtros Ativos de ButterworthDocumento4 páginasFiltros Ativos de ButterworthJean LimaAinda não há avaliações
- VibracaoDocumento45 páginasVibracaoFábio Figueiredo100% (1)
- Lista Exercicios Eletrônica AplicadaDocumento4 páginasLista Exercicios Eletrônica AplicadaIsaac HenriqueAinda não há avaliações
- Aula 2 - Configuração Sallen Key e Filtro Passa-BaixasDocumento18 páginasAula 2 - Configuração Sallen Key e Filtro Passa-BaixasAlexandreAinda não há avaliações
- Análise de Vibrações CSIDocumento56 páginasAnálise de Vibrações CSILuiz AngeloAinda não há avaliações
- Dados Dos ProdutosDocumento22 páginasDados Dos ProdutosAdeilton Loureiro NascimentoAinda não há avaliações
- Relatório Filtros PassivosDocumento14 páginasRelatório Filtros PassivosPedro Henrique NogueiraAinda não há avaliações
- Filtro Passa FaixaDocumento5 páginasFiltro Passa FaixaGilmar Da Silva NetoAinda não há avaliações
- Anritsu - LaserCom - Curso 280 Spectrum Master MS2711EDocumento41 páginasAnritsu - LaserCom - Curso 280 Spectrum Master MS2711EmiqueiasAinda não há avaliações
- Relatório Técnico - Aula Prática 6 - Manutenção Preditiva Através Do Monitoramento de VibraçõesDocumento12 páginasRelatório Técnico - Aula Prática 6 - Manutenção Preditiva Através Do Monitoramento de VibraçõesThiago MarsicanoAinda não há avaliações
- Medir Rotacao Com MicrofoneDocumento2 páginasMedir Rotacao Com MicrofoneJúlio César HaasAinda não há avaliações
- SKF - Boletim Técnico Espectro Da Corrente Eletrica EletricoDocumento11 páginasSKF - Boletim Técnico Espectro Da Corrente Eletrica EletricoJose SilvsAinda não há avaliações
- Aprendizado de Análise de VibraçãoDocumento88 páginasAprendizado de Análise de VibraçãoClaudio Oliveira100% (1)
- MMTEC - TECNICA Análise VibraçõesDocumento62 páginasMMTEC - TECNICA Análise VibraçõesRonay de Andrade PereiraAinda não há avaliações
- Analizador de EspectroDocumento34 páginasAnalizador de EspectrooldjanusAinda não há avaliações
- Pratica de Inversor e TacômetroDocumento2 páginasPratica de Inversor e Tacômetrogwenalighieri277Ainda não há avaliações
- Guia Do Gerador de Formas de Onda e Funções Arbitrárias - B&K PrecisionDocumento32 páginasGuia Do Gerador de Formas de Onda e Funções Arbitrárias - B&K Precisionapocalipc100% (1)
- FT 857D PortuguêsDocumento132 páginasFT 857D PortuguêsDavid Lopes100% (1)
- Atividade RLC Paralelo 3 Bim 10 11 2023 1Documento3 páginasAtividade RLC Paralelo 3 Bim 10 11 2023 1Megalomaniac brAinda não há avaliações
- Pundit Lab - Sales Flyer - Portuguese - HighDocumento4 páginasPundit Lab - Sales Flyer - Portuguese - HighWaldemarperiraSoaresAinda não há avaliações
- Pesquisa - Ferramentas de Diagnósticos de MáquinasDocumento5 páginasPesquisa - Ferramentas de Diagnósticos de MáquinasFernando EliasAinda não há avaliações
- Guia de Analise de Vibração MOBIUSDocumento109 páginasGuia de Analise de Vibração MOBIUSLucio Martins100% (2)
- Filtro Butterworth de Quarta Ordem Topologia Sallen-KeyDocumento16 páginasFiltro Butterworth de Quarta Ordem Topologia Sallen-Keyjaimejales2008Ainda não há avaliações
- 2º Laboratório - Comp. Interf. Eletromagnéticas - Laboratório - Teste Passa-BaixaDocumento8 páginas2º Laboratório - Comp. Interf. Eletromagnéticas - Laboratório - Teste Passa-BaixaElisson EduardoAinda não há avaliações
- Aula 04Documento6 páginasAula 04bruno_torres_12Ainda não há avaliações
- Aula 12 Vibrações Mecânicas - 2021 - 2 Tecnicas-de-Analise-de-VibracoesDocumento80 páginasAula 12 Vibrações Mecânicas - 2021 - 2 Tecnicas-de-Analise-de-VibracoesMarcos Freitas100% (1)
- LEE03 Exp5 RafaelRiosMonteiro&FelipeVeidzDocumento19 páginasLEE03 Exp5 RafaelRiosMonteiro&FelipeVeidzFelipe VeidzAinda não há avaliações
- Alternadores PrestoliteDocumento125 páginasAlternadores PrestoliteFanuel Oliveira60% (5)
- Relatorio 3 - Circuitos IIDocumento26 páginasRelatorio 3 - Circuitos IIEduardo CeideAinda não há avaliações
- Slides Apresentacao Ultrasson RenatoaraujoDocumento59 páginasSlides Apresentacao Ultrasson RenatoaraujoJoão Paulo LoboAinda não há avaliações
- Relatorio 1Documento10 páginasRelatorio 1Thiago BerscgAinda não há avaliações
- Anexo1 - Planificacoes FrequenciasDocumento26 páginasAnexo1 - Planificacoes FrequenciasreisguilhermemlAinda não há avaliações
- 3 Sensores de VibracaoDocumento15 páginas3 Sensores de VibracaoRenadson CesarAinda não há avaliações
- Sony mhc-rg330 SMDocumento65 páginasSony mhc-rg330 SMMiguel SernaAinda não há avaliações
- Controlo Da CondiçãoDocumento20 páginasControlo Da CondiçãoMiguel Silva75% (4)
- FT-100 - FT-100D Yaesu RádioDocumento107 páginasFT-100 - FT-100D Yaesu RádioFrancisco GomesAinda não há avaliações
- WEG CFW 10 Manual Do Usuario 0899.5860 2.2x Manual Portugues BRDocumento110 páginasWEG CFW 10 Manual Do Usuario 0899.5860 2.2x Manual Portugues BRLuis Parra86% (7)
- Espectro Vibração em Motores ElétricosDocumento125 páginasEspectro Vibração em Motores Elétricosadordi75% (4)
- Análise de VibraçãoDocumento50 páginasAnálise de VibraçãoPatricia OliveiraAinda não há avaliações
- Apresentação Site MasterDocumento22 páginasApresentação Site MasterGilsonricardoAinda não há avaliações
- Aula 04 - Instrumentacao Aplicada Ao Monitoramento de Maquinas - Parte 1Documento28 páginasAula 04 - Instrumentacao Aplicada Ao Monitoramento de Maquinas - Parte 1Vitor Gomes RodriguesAinda não há avaliações
- Filtros DigitaisDocumento27 páginasFiltros DigitaisCarlos JuniorAinda não há avaliações
- Lista de Exercícios de Filtros AtivosDocumento6 páginasLista de Exercícios de Filtros AtivosAlexandreAinda não há avaliações
- Manutenção Preditiva - Analise VibraçõesDocumento25 páginasManutenção Preditiva - Analise VibraçõesLuan MartinsAinda não há avaliações
- Fa - 095510 - RT0140 - Fev24 - Alto RiscoDocumento1 páginaFa - 095510 - RT0140 - Fev24 - Alto RiscoSolver Manutenção IndustrialAinda não há avaliações
- Fa - 095520 - RT0141 - Fev24 - Alto RiscoDocumento1 páginaFa - 095520 - RT0141 - Fev24 - Alto RiscoSolver Manutenção IndustrialAinda não há avaliações
- Fa - 095540 - RT0143 - Fev24 - Alto RiscoDocumento1 páginaFa - 095540 - RT0143 - Fev24 - Alto RiscoSolver Manutenção IndustrialAinda não há avaliações
- Fa - 095530 - RT0142 - Fev24 - Alto RiscoDocumento1 páginaFa - 095530 - RT0142 - Fev24 - Alto RiscoSolver Manutenção IndustrialAinda não há avaliações
- EXTRAÇÃODocumento6 páginasEXTRAÇÃOSolver Manutenção IndustrialAinda não há avaliações
- DT 4108 - 0210Documento2 páginasDT 4108 - 0210Solver Manutenção IndustrialAinda não há avaliações
- EXTRAÇÃODocumento4 páginasEXTRAÇÃOSolver Manutenção IndustrialAinda não há avaliações
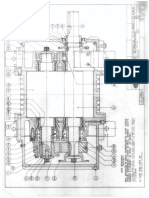
- I032520 - Desenho de Corte Do Soprador SRV-0710-13-20 0Documento1 páginaI032520 - Desenho de Corte Do Soprador SRV-0710-13-20 0Solver Manutenção IndustrialAinda não há avaliações
- Análise de VibraçõesDocumento1 páginaAnálise de VibraçõesSolver Manutenção IndustrialAinda não há avaliações
- Redutor Falk - 505 Abxu4Documento1 páginaRedutor Falk - 505 Abxu4Solver Manutenção IndustrialAinda não há avaliações
- KSB 125-80-315Documento96 páginasKSB 125-80-315Solver Manutenção IndustrialAinda não há avaliações
- I041820 - Desenho de Corte Do Soprador Srt-Of-1027-1039 0Documento1 páginaI041820 - Desenho de Corte Do Soprador Srt-Of-1027-1039 0Solver Manutenção IndustrialAinda não há avaliações
- Ficha 11 Ficha 2 Teste PraticoDocumento6 páginasFicha 11 Ficha 2 Teste PraticoYuryAinda não há avaliações
- WR Revista Eletrônica Número 0001Documento30 páginasWR Revista Eletrônica Número 0001DirceuAinda não há avaliações
- Relatorio Exp 1 Lab CircuitosDocumento22 páginasRelatorio Exp 1 Lab CircuitosMarcus Alberto Teixeira VieiraAinda não há avaliações
- Aula07 UFABC Design de Dispositivos 29 06Documento13 páginasAula07 UFABC Design de Dispositivos 29 06Francisco MelloAinda não há avaliações
- Ficha 01 - Receptores de Radio PDFDocumento6 páginasFicha 01 - Receptores de Radio PDFjoao pedroAinda não há avaliações
- Re82133 Fa11 Testepratico 2Documento4 páginasRe82133 Fa11 Testepratico 2sonia silvaAinda não há avaliações
- AL 2.1 Características Do Som (Manual)Documento3 páginasAL 2.1 Características Do Som (Manual)António CamposAinda não há avaliações
- Aula 2 Projeto ENEM OndulatóriaDocumento13 páginasAula 2 Projeto ENEM OndulatóriaRenan Schmidt FariaAinda não há avaliações
- 2instrumentacao e Dispositivos Medicos Unidade IIDocumento40 páginas2instrumentacao e Dispositivos Medicos Unidade IIAndré PhelpsAinda não há avaliações
- OciloscopioDocumento5 páginasOciloscopioRichard Cavalcanti FigueiredoAinda não há avaliações
- Ci CD4046 FinalDocumento11 páginasCi CD4046 FinalVictor PazAinda não há avaliações
- 07 - Camada Fı́sica (Transmissão Analógica)Documento16 páginas07 - Camada Fı́sica (Transmissão Analógica)juliano ramboAinda não há avaliações
- Capítulo2 - Sinais SenoidaisDocumento18 páginasCapítulo2 - Sinais Senoidaisbaladrito100% (1)
- Como Funciona o PLLDocumento6 páginasComo Funciona o PLLAllan DennisAinda não há avaliações
- Mouser cf42Documento202 páginasMouser cf42Jorge mitrioneAinda não há avaliações
- 1 - CUMMINS 4 e 6 Cilindros - Ford EDC 07Documento14 páginas1 - CUMMINS 4 e 6 Cilindros - Ford EDC 07Jefferson Silva100% (3)
- Atividades Laboratoriais 2.1 e 2.2: ResumoDocumento3 páginasAtividades Laboratoriais 2.1 e 2.2: ResumoMiguel CorreiaAinda não há avaliações
- Ementa2 - Comunicacao de DadosDocumento3 páginasEmenta2 - Comunicacao de DadosJesué Lucas DiogoAinda não há avaliações
- Datasheet RPIV R4 32Documento4 páginasDatasheet RPIV R4 32Aldenir Jose Batista100% (1)
- 3.1 - Introdução Aos Sinais e SistemasDocumento29 páginas3.1 - Introdução Aos Sinais e SistemasPatrick MenezesAinda não há avaliações
- Práticas Analógica 2 PDF PostarDocumento25 páginasPráticas Analógica 2 PDF PostarLazim DalbelloAinda não há avaliações
- Eletricidade CA Polar RL RLCDocumento128 páginasEletricidade CA Polar RL RLCdesportista_luisAinda não há avaliações
- Cap 5 Introdução - Transm - DigitalDocumento56 páginasCap 5 Introdução - Transm - DigitalLeonardo AugustoAinda não há avaliações
- Remoção Da Interferência de 60 HZ No Sinal de ECG Usando Filtro Notch DigitalDocumento13 páginasRemoção Da Interferência de 60 HZ No Sinal de ECG Usando Filtro Notch DigitalJoão EmanuelAinda não há avaliações
- TOP 03 SSTD P2 ComentadaDocumento29 páginasTOP 03 SSTD P2 ComentadaMATHEUSAinda não há avaliações