Você também pode gostar
- Desenvolvendo Em Vc# Um Supervisório Para Monitoramento De Fluxo De Massa Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em Vc# Um Supervisório Para Monitoramento De Fluxo De Massa Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Relatório Tecnico - Blue ToothDocumento17 páginasRelatório Tecnico - Blue ToothIgor FiuzaAinda não há avaliações
- Robô Seguidor de Linha 1Documento15 páginasRobô Seguidor de Linha 1weslley100% (1)
- TRABALHO DE CONCLUSÃO DO CURSO SenaiDocumento17 páginasTRABALHO DE CONCLUSÃO DO CURSO SenaiAlexandre mendesAinda não há avaliações
- Artigo Científico09090933Documento8 páginasArtigo Científico09090933docentesenaimtAinda não há avaliações
- Projeto Carrinho de Controle Remoto Via ArduinoDocumento40 páginasProjeto Carrinho de Controle Remoto Via ArduinoAmanda Simões100% (2)
- Sistema de Controle Impressora 3DDocumento2 páginasSistema de Controle Impressora 3DJosias SantosAinda não há avaliações
- Manual de Automação Da Bomba Wayne PDFDocumento17 páginasManual de Automação Da Bomba Wayne PDFCarlos Rogerio LimongiAinda não há avaliações
- Manual Neo C ModuleDocumento28 páginasManual Neo C ModuleGuto CalzzaniAinda não há avaliações
- Apostila Edgecam 2018R1 PDFDocumento103 páginasApostila Edgecam 2018R1 PDFOdil Elizandro BaldiatiAinda não há avaliações
- Sistema de Navegação Inercial: Eletrônica EmbarcadaDocumento6 páginasSistema de Navegação Inercial: Eletrônica EmbarcadaJoão SouzaAinda não há avaliações
- Relatorio PIC Pisca Led Daniel Rosendo de SouzaDocumento3 páginasRelatorio PIC Pisca Led Daniel Rosendo de SouzaDaniel RosendoAinda não há avaliações
- Auto MacaoDocumento384 páginasAuto MacaoEmpresaSTIAinda não há avaliações
- Relatorio Projeto 2022 2Documento10 páginasRelatorio Projeto 2022 2tito limaAinda não há avaliações
- PT Installation Guide - EngineVault and PSADocumento17 páginasPT Installation Guide - EngineVault and PSAWagner GuimarãesAinda não há avaliações
- Análise de VibraçõesDocumento9 páginasAnálise de VibraçõesRaphael AugustoAinda não há avaliações
- Manual MS2 Racing Rev B PDFDocumento43 páginasManual MS2 Racing Rev B PDFDanilo M AlvesAinda não há avaliações
- Apostila OrcadDocumento64 páginasApostila OrcadKiko LikoAinda não há avaliações
- Manual de Automação Da Bomba Wayne - PDF Download GrátisDocumento16 páginasManual de Automação Da Bomba Wayne - PDF Download GrátisZilda Cristina De GrandiAinda não há avaliações
- Laboratório 2 Redes de Computadores GNS3 e Definição de Rotas EstáticasDocumento19 páginasLaboratório 2 Redes de Computadores GNS3 e Definição de Rotas EstáticasmarnaudoficialAinda não há avaliações
- Relatorio 180041169 e 180138863Documento11 páginasRelatorio 180041169 e 180138863Gabriel ÂngeloAinda não há avaliações
- Lutcho - Plotter Caseiro para PCBDocumento6 páginasLutcho - Plotter Caseiro para PCBAlex StrasserAinda não há avaliações
- Relatorio LAB AUTOMACAODocumento34 páginasRelatorio LAB AUTOMACAOdcn USINAGEMAinda não há avaliações
- Robo Manipulador ParaleloDocumento6 páginasRobo Manipulador Paralelodanilo_costa_oliveira8724Ainda não há avaliações
- TutorialDocumento27 páginasTutorialIcaro AbreuAinda não há avaliações
- Relatorio MotorDCDocumento7 páginasRelatorio MotorDCMaay ChanAinda não há avaliações
- Relatorio de Estagio Parte 2Documento17 páginasRelatorio de Estagio Parte 2Nicolas Fernandes da RochaAinda não há avaliações
- 2019 2 11 FinalDocumento131 páginas2019 2 11 FinalKz RedeAinda não há avaliações
- Mit 160814 - Chaves Operáveis Sob CargaDocumento12 páginasMit 160814 - Chaves Operáveis Sob Cargabrunojgomes19Ainda não há avaliações
- RElatorio Unidade 1 de Comandos EletricosDocumento17 páginasRElatorio Unidade 1 de Comandos EletricosFelipe PajeuAinda não há avaliações
- Simulacao de Motor CC e Controle Com PID de VelocidadeDocumento4 páginasSimulacao de Motor CC e Controle Com PID de VelocidadeJOERDSON TIAGO BATISTA DA SILVAAinda não há avaliações
- Programaçao Paralela em GPU AMDDocumento10 páginasProgramaçao Paralela em GPU AMDrafael martinsAinda não há avaliações
- Experiência de Boyle-MariotteDocumento23 páginasExperiência de Boyle-MariotteAndré B. CunhaAinda não há avaliações
- DT358 - Manual de Automacao Da Bomba Wayne Com CPU iGEM - 3G - Helix - Rev. 04Documento16 páginasDT358 - Manual de Automacao Da Bomba Wayne Com CPU iGEM - 3G - Helix - Rev. 04RobSilvaAinda não há avaliações
- AC M4 OP1 Teste - Avaliação 2022 - 23 II V.ADocumento4 páginasAC M4 OP1 Teste - Avaliação 2022 - 23 II V.ASusana CascaisAinda não há avaliações
- Apostila RastherDocumento36 páginasApostila RastherDiego Goncalves100% (1)
- Relatorio de SimulçaDocumento6 páginasRelatorio de SimulçaUilis SegredoAinda não há avaliações
- Motor DCDocumento2 páginasMotor DCRaupp476Ainda não há avaliações
- Apostila Curumim Hardware v2.0Documento23 páginasApostila Curumim Hardware v2.0Wanderson Antonio Sousa SilvaAinda não há avaliações
- Cambio Imotion Dica TécnicaDocumento1 páginaCambio Imotion Dica TécnicatadeuAinda não há avaliações
- Relatorio LAC FinalDocumento19 páginasRelatorio LAC FinalMatheus RaffaelAinda não há avaliações
- Guia Do Aluno - Objeto EducacionalDocumento6 páginasGuia Do Aluno - Objeto EducacionalfabriciafrmAinda não há avaliações
- Desenvolvendo Em Vb Um Supervisório Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em Vb Um Supervisório Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Desenvolvendo Em App Inventor Para Android Um Supervisório Para Monitoramento De Fluxo De Massa Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em App Inventor Para Android Um Supervisório Para Monitoramento De Fluxo De Massa Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Hexa ScorpionDocumento32 páginasHexa ScorpionbernardoAinda não há avaliações
- Parte 2 - CNCDocumento68 páginasParte 2 - CNCHugo Campagnac PereiraAinda não há avaliações
- Vdocuments - MX 237119247 Manual Anarede v09Documento329 páginasVdocuments - MX 237119247 Manual Anarede v09João Carlos Lagass LapaAinda não há avaliações
- Padmo - Mostra Nacional de RobóticaDocumento6 páginasPadmo - Mostra Nacional de RobóticaMax TjAinda não há avaliações
- Compilado Tecnico Modulo 9 WebDocumento84 páginasCompilado Tecnico Modulo 9 WebArnaldoAinda não há avaliações
- AB - Aula 5Documento16 páginasAB - Aula 5Paulo Celestino de LimaAinda não há avaliações
- Estou Compartilhando o Arquivo 'Relatorio Semana 2.' Com VocêDocumento2 páginasEstou Compartilhando o Arquivo 'Relatorio Semana 2.' Com Vocêms2711924Ainda não há avaliações
- Desenvolvendo Em Vc# Um Supervisório Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em Vc# Um Supervisório Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- AB - Aula 9cDocumento25 páginasAB - Aula 9cPaulo Celestino de LimaAinda não há avaliações
- RVC-12 - Controlador Fator Potência PDFDocumento34 páginasRVC-12 - Controlador Fator Potência PDFRafael Ricardo BonaAinda não há avaliações
- Documentação Lombada PDFDocumento26 páginasDocumentação Lombada PDFTiago BalbinoAinda não há avaliações
- Relatorio Projeto 2 PED2Documento5 páginasRelatorio Projeto 2 PED2Sei AuhAinda não há avaliações
- Desenvolvendo Um Web Server Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Um Web Server Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Desenvolvendo Em Vb Um Supervisório Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em Vb Um Supervisório Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Desenvolvendo Em Vc# Um Supervisório Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Em Vc# Um Supervisório Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Trabalho IA 20 EpocasDocumento7 páginasTrabalho IA 20 Epocastito limaAinda não há avaliações
- (D&D 5) Criação de PersonagemDocumento83 páginas(D&D 5) Criação de PersonagemClaudia SilvaAinda não há avaliações
- D&D 5E - Fora Do Abismo (v1.0) (Fundo Colorido) - Biblioteca ÉlficaDocumento256 páginasD&D 5E - Fora Do Abismo (v1.0) (Fundo Colorido) - Biblioteca ÉlficaGabriel Pinheiro93% (28)
- (D&D 5) Criação de PersonagemDocumento83 páginas(D&D 5) Criação de PersonagemClaudia SilvaAinda não há avaliações
- A-Classificacao de SoftwaresDocumento9 páginasA-Classificacao de SoftwaresFrancisco Manuel JoaoAinda não há avaliações
- Manual Geovision V8.3Documento486 páginasManual Geovision V8.3Sergio Junior100% (2)
- Threads - AtividadeDocumento2 páginasThreads - AtividadeKarolyne MunizAinda não há avaliações
- Pmuc0100200 - Manual Rion+ Hi TecnologicaDocumento33 páginasPmuc0100200 - Manual Rion+ Hi TecnologicaAlexandre PennaAinda não há avaliações
- Sony - Actualizações Da KDL-32EX310Documento4 páginasSony - Actualizações Da KDL-32EX310antvilaAinda não há avaliações
- Manual Atos Expert BFDocumento39 páginasManual Atos Expert BFOseias Codignola0% (1)
- Técnicas de Programação - Texto Estruturado - SENAIDocumento10 páginasTécnicas de Programação - Texto Estruturado - SENAIHicaro Souza IDAinda não há avaliações
- Fundamentos para ComputaçãoDocumento16 páginasFundamentos para ComputaçãoMarcela CardinalAinda não há avaliações
- Biblioteca PthreadDocumento6 páginasBiblioteca PthreadgirlmalukettAinda não há avaliações
- Manual E3Documento342 páginasManual E3atlas_offzz100% (1)
- Como Formatar e Instalar o Windows 7 Passo A PassoDocumento10 páginasComo Formatar e Instalar o Windows 7 Passo A PassoLuciaMouraAinda não há avaliações
- Manual - WEG HMI APSDocumento10 páginasManual - WEG HMI APSMarcelo LescanoAinda não há avaliações
- Catálogo MXT 2022Documento82 páginasCatálogo MXT 2022Davi SiqueiraAinda não há avaliações
- Curriculum Do Marco AntonioDocumento1 páginaCurriculum Do Marco Antonioinstrutor.marcoAinda não há avaliações
- Aula 04 Fusíveis e Mplab Renata MercanteDocumento14 páginasAula 04 Fusíveis e Mplab Renata MercanteDouglas Silva Dos Santos SouzaAinda não há avaliações
- Apostila de Sistemas OperacionaisDocumento114 páginasApostila de Sistemas OperacionaisWesley Prata80% (5)
- História Da ProgramaçãoDocumento17 páginasHistória Da ProgramaçãoBennie HullAinda não há avaliações
- Team Viewer Manual PTDocumento99 páginasTeam Viewer Manual PTCarlos Evandro PizzinatAinda não há avaliações
- Catalogo Adelco Institucional 2011Documento24 páginasCatalogo Adelco Institucional 2011Rafael FreitasAinda não há avaliações
- Apostila Extensão COBOLDocumento12 páginasApostila Extensão COBOLLord_EnigmaAinda não há avaliações
- Apostila PHPDocumento54 páginasApostila PHPFábioHenriqueAinda não há avaliações
- Catalogo Fibra Optica2019 (1.0)Documento75 páginasCatalogo Fibra Optica2019 (1.0)Luis SilvaAinda não há avaliações
- Aula 1Documento14 páginasAula 1ClaudioTRodriguesAinda não há avaliações
- Ibercusa Manu Completo 002 PDFDocumento91 páginasIbercusa Manu Completo 002 PDFTiago JesusAinda não há avaliações
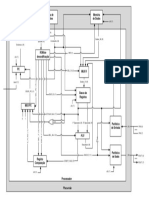
- Esquema ProcessadorDocumento1 páginaEsquema ProcessadorJuan SilvaAinda não há avaliações
- AlgoritmosDocumento57 páginasAlgoritmosJefferson AraujoAinda não há avaliações
- TC04Documento0 páginaTC04Nicollas FreitasAinda não há avaliações
- Notas SSCPDocumento37 páginasNotas SSCPScribdTranslationsAinda não há avaliações
- AfroDev Segunda SemanaDocumento155 páginasAfroDev Segunda SemanaZ. O.Ainda não há avaliações
- Artigo Sobre Escalonamento de ProcessosDocumento12 páginasArtigo Sobre Escalonamento de ProcessosRenan Felipe0% (1)