Você também pode gostar
- Planejamento Matemática 6º Ao 9º AnoDocumento28 páginasPlanejamento Matemática 6º Ao 9º AnoFrancisco Mondadori Jr.89% (28)
- Asme-B 31.3 PortuguêsDocumento338 páginasAsme-B 31.3 Portuguêsgolgo-sinistro100% (2)
- Trabalho de PontesDocumento92 páginasTrabalho de PontesSabores de ouroAinda não há avaliações
- Apostila Matematica Discreta 2 SEM2012Documento81 páginasApostila Matematica Discreta 2 SEM2012名前苗字Ainda não há avaliações
- Pontes e Estruturas Especiais I - Apostila - b1Documento131 páginasPontes e Estruturas Especiais I - Apostila - b1CARLOS SANTOSAinda não há avaliações
- Desenvolvimento de Um Sistema de Travagem Completo de Um VeículoDocumento85 páginasDesenvolvimento de Um Sistema de Travagem Completo de Um VeículoPedro RodriguesAinda não há avaliações
- Ivestigação Dos Fatores Que AfetamDocumento227 páginasIvestigação Dos Fatores Que AfetamBruno HenriqueAinda não há avaliações
- Linhas AeriasDocumento44 páginasLinhas Aeriasjerson goncalves100% (1)
- Versao Final Renata 17.03.16Documento213 páginasVersao Final Renata 17.03.16SMAE ArquivoAinda não há avaliações
- 03 - Manual Do TQSDocumento292 páginas03 - Manual Do TQSRodrigo NAinda não há avaliações
- Projeto de Instalaçoes Elétricas - Versão FinalDocumento81 páginasProjeto de Instalaçoes Elétricas - Versão FinalJosé RobertoAinda não há avaliações
- Manual de Orientacao Aos Loteadores v3Documento113 páginasManual de Orientacao Aos Loteadores v3carlos ViníciusAinda não há avaliações
- MIX MetalicasDocumento78 páginasMIX MetalicasPaulo CotteAinda não há avaliações
- Florianopolis PPC Engenharia MecatronicaDocumento435 páginasFlorianopolis PPC Engenharia MecatronicaHumberto Magno FukeAinda não há avaliações
- Arq - Mem - Desc e Espec. Técn - UgpeDocumento107 páginasArq - Mem - Desc e Espec. Técn - UgpeRobson TavaresAinda não há avaliações
- Apostila de Modelagem de Calçados AprendizagemDocumento130 páginasApostila de Modelagem de Calçados AprendizagemRiquelme Oliveira100% (1)
- Manual de Estruturas Versao 1Documento184 páginasManual de Estruturas Versao 1Ze JuliaoAinda não há avaliações
- Manual para Projeto de Pesquisa e Trabalho de Conclusao de Curso - Faculdades Do Grupo Faef PDFDocumento47 páginasManual para Projeto de Pesquisa e Trabalho de Conclusao de Curso - Faculdades Do Grupo Faef PDFTIAGO CRISTIANO DIAS BUENOAinda não há avaliações
- Substituição Do Arame Recozido de AmarraçãoDocumento40 páginasSubstituição Do Arame Recozido de AmarraçãoSamyla AndradeAinda não há avaliações
- Jennifer Nhane Telecomunicação de Dados e Voz Nas Subestações Eletricas - ITRIDocumento44 páginasJennifer Nhane Telecomunicação de Dados e Voz Nas Subestações Eletricas - ITRIJennifer NhaneAinda não há avaliações
- Relatorio PTDocumento94 páginasRelatorio PTAnamaria SousaAinda não há avaliações
- Analise TecnicaDocumento81 páginasAnalise TecnicaEveraldo LealAinda não há avaliações
- Quartzo Tools - MANUALDocumento87 páginasQuartzo Tools - MANUALLuiz VieiraAinda não há avaliações
- Engenheiro de Tráfego - Conhecimentos EspecíficosDocumento99 páginasEngenheiro de Tráfego - Conhecimentos EspecíficosThalia RosaAinda não há avaliações
- Engenharia de Trafego - Modulo 1Documento99 páginasEngenharia de Trafego - Modulo 1Rafael Dos SantosAinda não há avaliações
- Apostila Eng. de Tráfego 1 3Documento253 páginasApostila Eng. de Tráfego 1 3Ítalo Harry ChitlalAinda não há avaliações
- DM RicardoCorreia 2013 MEC PDFDocumento211 páginasDM RicardoCorreia 2013 MEC PDFPaulo HenriqueAinda não há avaliações
- Apostila MDDocumento97 páginasApostila MDlucas gomesAinda não há avaliações
- TI WT Concursos 2Documento153 páginasTI WT Concursos 2Mario BrostAinda não há avaliações
- RefrigeraçãoDocumento60 páginasRefrigeraçãoCharles SilvaAinda não há avaliações
- Vade Mecum TBR - Normas Gerais e Regras Gerais 2023Documento39 páginasVade Mecum TBR - Normas Gerais e Regras Gerais 2023Just AloneAinda não há avaliações
- Estudo Das Tecnicas de Reforço A Flexão Simples Com Chapas de Aço ColadasDocumento69 páginasEstudo Das Tecnicas de Reforço A Flexão Simples Com Chapas de Aço ColadasBuczenkoAinda não há avaliações
- 2 Torneamento 98 PDocumento98 páginas2 Torneamento 98 PEd Carlos MottaAinda não há avaliações
- Marcio Roberto de Oliveira Gestão de Projetos MBA PDFDocumento71 páginasMarcio Roberto de Oliveira Gestão de Projetos MBA PDFcleitonpinto1Ainda não há avaliações
- PO2 Notas AulaDocumento44 páginasPO2 Notas AulaFeliciano SantosAinda não há avaliações
- Como EscreverDocumento16 páginasComo EscreverCamila Benatti0% (1)
- Caderno de Notas de Projeto Geométrico de Estradas - AMCFDocumento145 páginasCaderno de Notas de Projeto Geométrico de Estradas - AMCFMário Moura100% (1)
- Manualdo TCCINEDocumento66 páginasManualdo TCCINEMylena CorreaAinda não há avaliações
- Apostila Balancos de Massa e EnergiaDocumento164 páginasApostila Balancos de Massa e EnergiaRommel AscenciónAinda não há avaliações
- Serralharia Civil 2018Documento31 páginasSerralharia Civil 2018Celestino MucoaAinda não há avaliações
- Manual para Elaboração Do TCC - Engenharias - UNICID - V1Documento35 páginasManual para Elaboração Do TCC - Engenharias - UNICID - V1Henrique AraújoAinda não há avaliações
- Centrifugas Tripe 2010-30-50-100Documento36 páginasCentrifugas Tripe 2010-30-50-100Fabiano Cunha da SilvaAinda não há avaliações
- TCC - Normas para Apresentacao - Versao FinalDocumento55 páginasTCC - Normas para Apresentacao - Versao FinalmelanieAinda não há avaliações
- 01 - Manual Do TQSDocumento86 páginas01 - Manual Do TQSRodrigo NAinda não há avaliações
- Revisão de Aterramento para Instalações PrediaisDocumento95 páginasRevisão de Aterramento para Instalações PrediaisNatalia AlmeidaAinda não há avaliações
- Apostila Vasos de PressãoDocumento156 páginasApostila Vasos de Pressãoaoflima100% (3)
- Alvenaria em blocos de concreto: Projeto estrutural de acordo com a NBR 16868 - 1, 2 ABNT, 2020No EverandAlvenaria em blocos de concreto: Projeto estrutural de acordo com a NBR 16868 - 1, 2 ABNT, 2020Ainda não há avaliações
- Modelagem Numérica e Computacional com Similitude e Elementos Finitos: Desenvolvimento de Equação Preditiva para o Cálculo da Força de Retenção em Freios de EstampagemNo EverandModelagem Numérica e Computacional com Similitude e Elementos Finitos: Desenvolvimento de Equação Preditiva para o Cálculo da Força de Retenção em Freios de EstampagemAinda não há avaliações
- UntitledDocumento291 páginasUntitledOlivia BrittsAinda não há avaliações
- 82 Atividades de Matemc3a1tica 5c2ba Ano DescritoresDocumento48 páginas82 Atividades de Matemc3a1tica 5c2ba Ano DescritoresEliane MaiaAinda não há avaliações
- Álgebra Linear e VetorialDocumento255 páginasÁlgebra Linear e VetorialMarcus Vinicius Queiroz PestanaAinda não há avaliações
- MainDocumento220 páginasMainpaulacristina.conteudistaAinda não há avaliações
- Álgebra Linear e VetorialDocumento255 páginasÁlgebra Linear e VetorialMarcus Vinicius Queiroz PestanaAinda não há avaliações
- Adutoras - Homero - Cap2 - 10112015 - V1 PDFDocumento24 páginasAdutoras - Homero - Cap2 - 10112015 - V1 PDFTaís Vicente Nunes MatesAinda não há avaliações
- Galoa Proceedings Pibic 2016 51241Documento1 páginaGaloa Proceedings Pibic 2016 51241paulacristina.conteudistaAinda não há avaliações
- 2464-Texto Do Artigo-9919-1-10-20130819Documento3 páginas2464-Texto Do Artigo-9919-1-10-20130819paulacristina.conteudistaAinda não há avaliações
- Matematica Pacher ItaipuDocumento18 páginasMatematica Pacher Itaipuedusf1000Ainda não há avaliações
- Equação Do Movimento - MecanismosDocumento36 páginasEquação Do Movimento - MecanismosJéfferson SantosAinda não há avaliações
- Cap 4 Parte 1Documento20 páginasCap 4 Parte 1Patrick Julian RezendeAinda não há avaliações
- Admin, 16 PDFDocumento10 páginasAdmin, 16 PDFpaulacristina.conteudistaAinda não há avaliações
- Cap 2Documento80 páginasCap 2Elieldy FernandesAinda não há avaliações
- Eletrônica AplicadaDocumento2 páginasEletrônica Aplicadapaulacristina.conteudistaAinda não há avaliações
- Eletrônica AplicadaDocumento2 páginasEletrônica Aplicadapaulacristina.conteudistaAinda não há avaliações
- Escobar RobertoLuiz MDocumento150 páginasEscobar RobertoLuiz Mpaulacristina.conteudistaAinda não há avaliações
- 260 805 1 PBDocumento13 páginas260 805 1 PBReynan MaurícioAinda não há avaliações
- Seleção de Materiais - Maurizio FerranteDocumento14 páginasSeleção de Materiais - Maurizio FerranteLucas CordeiroAinda não há avaliações
- Cap 4 Parte 1Documento20 páginasCap 4 Parte 1Patrick Julian RezendeAinda não há avaliações
- PPC Ema 22052017-1Documento116 páginasPPC Ema 22052017-1paulacristina.conteudistaAinda não há avaliações
- Equação Do Movimento - MecanismosDocumento36 páginasEquação Do Movimento - MecanismosJéfferson SantosAinda não há avaliações
- Escobar RobertoLuiz MDocumento150 páginasEscobar RobertoLuiz Mpaulacristina.conteudistaAinda não há avaliações
- Eletrônica AplicadaDocumento2 páginasEletrônica Aplicadapaulacristina.conteudistaAinda não há avaliações
- Escobar RobertoLuiz MDocumento150 páginasEscobar RobertoLuiz Mpaulacristina.conteudistaAinda não há avaliações
- PPC Ema 22052017-1Documento116 páginasPPC Ema 22052017-1paulacristina.conteudistaAinda não há avaliações
- 260 805 1 PBDocumento13 páginas260 805 1 PBReynan MaurícioAinda não há avaliações
- CCE1596 Aula10Documento41 páginasCCE1596 Aula10paulacristina.conteudistaAinda não há avaliações
- 2464-Texto Do Artigo-9919-1-10-20130819Documento3 páginas2464-Texto Do Artigo-9919-1-10-20130819paulacristina.conteudistaAinda não há avaliações
- Projetoe Selecaode Componentes MecanicosDocumento31 páginasProjetoe Selecaode Componentes Mecanicospaulacristina.conteudistaAinda não há avaliações
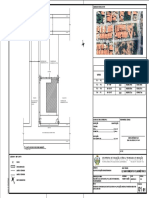
- Planta Georreferenciada Imovel 1Documento1 páginaPlanta Georreferenciada Imovel 1Abdias JeronimoAinda não há avaliações
- Disciplinas UNICAMPDocumento19 páginasDisciplinas UNICAMPChristyan OssamuAinda não há avaliações
- AV3 Resistência Dos Materiais 2015.2Documento6 páginasAV3 Resistência Dos Materiais 2015.2arthusnambrowicAinda não há avaliações
- Tabela Laje IsoporDocumento4 páginasTabela Laje IsoporLgSalgadoAinda não há avaliações
- 1 Prova 6º AnoDocumento3 páginas1 Prova 6º AnoGabryelly MachadoAinda não há avaliações
- Teste 11FDocumento7 páginasTeste 11Fmatilde.silva.3Ainda não há avaliações
- Biomecânica para Fisioterapeutas - 69pDocumento69 páginasBiomecânica para Fisioterapeutas - 69pivanfersantosAinda não há avaliações
- Revisao 8 Ano - Raiz e PotenciaDocumento2 páginasRevisao 8 Ano - Raiz e PotenciaPablo José100% (1)
- Lista1 CalculoIIDocumento2 páginasLista1 CalculoIICompras VendasAinda não há avaliações
- Resumo GrossDocumento22 páginasResumo GrossMaycomAinda não há avaliações
- Gabarito - Ae3 - Matemática - 8º Ano PDFDocumento8 páginasGabarito - Ae3 - Matemática - 8º Ano PDFAntonio CorreiaAinda não há avaliações
- 2019-07-24 20-49-17 Lista 01 Exercicios de AlgoritmosDocumento1 página2019-07-24 20-49-17 Lista 01 Exercicios de AlgoritmosRicardo RochaAinda não há avaliações
- Lista de Termologia PDFDocumento14 páginasLista de Termologia PDFEmanuel VicenteAinda não há avaliações
- Prova Sesc DFDocumento8 páginasProva Sesc DFAmanda Gonçalves RibeiroAinda não há avaliações
- Seminário.. FísicaDocumento8 páginasSeminário.. FísicaVasco Joaquim MhulaAinda não há avaliações
- Lista de Exercícios 1b - MATi01 - Cálculo I - RESPOSTAS 2Documento5 páginasLista de Exercícios 1b - MATi01 - Cálculo I - RESPOSTAS 2HigorAinda não há avaliações
- Template Planejamento EstratégicoDocumento26 páginasTemplate Planejamento EstratégicoGerisval Alves Pessoa100% (1)
- Propriedades Mecanicas 2Documento24 páginasPropriedades Mecanicas 2jcadeoliveiraAinda não há avaliações
- ICF1 AD1 GABA 2018 1 - v2Documento10 páginasICF1 AD1 GABA 2018 1 - v2Wagner MoreiraAinda não há avaliações
- Atividade de Razão e ProporçãoDocumento6 páginasAtividade de Razão e ProporçãoSantos SilvaAinda não há avaliações
- Questão 1Documento2 páginasQuestão 1Lucas MateusAinda não há avaliações
- 10 Mandamentos para Professores de Matematica - George Polya PDFDocumento9 páginas10 Mandamentos para Professores de Matematica - George Polya PDFBIBLO0% (1)
- Aula 20-08-2021Documento164 páginasAula 20-08-2021tspaesAinda não há avaliações
- VentiladoresDocumento27 páginasVentiladoresbrunoang159Ainda não há avaliações
- 1º Atividade Engenharia AlunosDocumento3 páginas1º Atividade Engenharia AlunosEzequiel BorgesAinda não há avaliações
- PROVA Provao de Bolsas EM EPCARDocumento16 páginasPROVA Provao de Bolsas EM EPCARMatheus RodriguesAinda não há avaliações
- Potencia Ativa e Reativa em Sistemas Eletricos PDFDocumento11 páginasPotencia Ativa e Reativa em Sistemas Eletricos PDFJoão Marcelo T HAinda não há avaliações
- Trigonometria Primeiro AnoDocumento8 páginasTrigonometria Primeiro AnoTHIAGO MILLER CASTELO BRANCO DE OLIVEIRAAinda não há avaliações
- Custos e Preços - Unidade IIIDocumento45 páginasCustos e Preços - Unidade IIIricardo pires de camposAinda não há avaliações