Você também pode gostar
- Análise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerNo EverandAnálise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerAinda não há avaliações
- Apostila de TfoDocumento300 páginasApostila de TfoRonan R. GuimarãesAinda não há avaliações
- DSV TrabalhoDocumento18 páginasDSV TrabalhoJoão Victor Carvalho de AzevedoAinda não há avaliações
- Isoladores Elétricos de Porcelana: avaliação do desempenho através do uso de recobrimentos poliméricos hidrofóbicosNo EverandIsoladores Elétricos de Porcelana: avaliação do desempenho através do uso de recobrimentos poliméricos hidrofóbicosAinda não há avaliações
- NBR 12589 1992 Proteao de Taludes e Fixaao de Margens em Obras Portuarias CompressDocumento4 páginasNBR 12589 1992 Proteao de Taludes e Fixaao de Margens em Obras Portuarias CompressIgor AntonioAinda não há avaliações
- Aspectos relativos à folga abaixo da quilha de navios com enfoque nos parâmetros operacionais portuários verticaisNo EverandAspectos relativos à folga abaixo da quilha de navios com enfoque nos parâmetros operacionais portuários verticaisAinda não há avaliações
- Inspeção Da Integridade Das Estruturas Fixadas em SoloDocumento13 páginasInspeção Da Integridade Das Estruturas Fixadas em SoloBárbara Maria Pereira do AmaralAinda não há avaliações
- Cópia de Dragagens - Atividade Continuada (Ex. 1, 2 e 3)Documento4 páginasCópia de Dragagens - Atividade Continuada (Ex. 1, 2 e 3)Gustavo Castello de SalveAinda não há avaliações
- Conceitos de Redundância Aplicados Ao Sistema de Posicionamento DinâmicoDocumento11 páginasConceitos de Redundância Aplicados Ao Sistema de Posicionamento DinâmicoFelipe RenanAinda não há avaliações
- TF065 M ImportanteDocumento15 páginasTF065 M ImportanteRichard Leonel Vasquez MezaAinda não há avaliações
- PM e PSSDocumento38 páginasPM e PSSEdilene OliveiraAinda não há avaliações
- NBR 10157 - Aterros de Residuos PerigososDocumento13 páginasNBR 10157 - Aterros de Residuos PerigososPaulo BianchiAinda não há avaliações
- Cote 255Documento11 páginasCote 255Carlos MartinsAinda não há avaliações
- Aula 2Documento52 páginasAula 2José AtilaAinda não há avaliações
- ABNT NBR 10157 - Aterros de Resíduos Perigosos - Critério para Prjeto, Construção e Operação.Documento13 páginasABNT NBR 10157 - Aterros de Resíduos Perigosos - Critério para Prjeto, Construção e Operação.Flavio da costaAinda não há avaliações
- Estudo Dos Canais de NavegaçãoDocumento20 páginasEstudo Dos Canais de NavegaçãoThamyres PereiraAinda não há avaliações
- NBR10157-Aterro Resíduos PerigososDocumento13 páginasNBR10157-Aterro Resíduos PerigososGustavo BarbosaAinda não há avaliações
- Limpeza e Inspeção Automatica de Dutos Submarinos Verticais (Risers)Documento10 páginasLimpeza e Inspeção Automatica de Dutos Submarinos Verticais (Risers)claudioAinda não há avaliações
- AULA 2 - Desenvol. Um Campo Subm.Documento53 páginasAULA 2 - Desenvol. Um Campo Subm.João SilvaAinda não há avaliações
- Corte e Solda SubDocumento162 páginasCorte e Solda SubMarcos OLIVEIRAAinda não há avaliações
- Interacao Fluido Estrutura em Ambiente OffshoreDocumento80 páginasInteracao Fluido Estrutura em Ambiente OffshoreClaudia Lemos RochaAinda não há avaliações
- Módulo 005 - Dispositivos e Equipamentos PDFDocumento14 páginasMódulo 005 - Dispositivos e Equipamentos PDFPedro Guilherme SouzaAinda não há avaliações
- Trabalho EST 2 TCC Navio de PassageirosDocumento16 páginasTrabalho EST 2 TCC Navio de PassageirosLuiz FernandoAinda não há avaliações
- Normam 311 Blibliografia PráticoDocumento9 páginasNormam 311 Blibliografia PráticoPedro Ian FélixAinda não há avaliações
- Lestcon 2012Documento34 páginasLestcon 2012Mauricio LamenzaAinda não há avaliações
- DragagemDocumento20 páginasDragagemMandrasse Jeronimo JuniorAinda não há avaliações
- Relatório Camada Drenante - Ana e MárciaDocumento23 páginasRelatório Camada Drenante - Ana e MárciaMárcia EllenAinda não há avaliações
- Manual Aplicação EscóriaDocumento48 páginasManual Aplicação EscóriaEnio MendesAinda não há avaliações
- Obras de Normalizaçã0 e Regularização Do LeitoDocumento13 páginasObras de Normalizaçã0 e Regularização Do LeitoGerson BarbosaAinda não há avaliações
- Portos e Vias Navegáveis - Unid 2Documento13 páginasPortos e Vias Navegáveis - Unid 2RichelyAinda não há avaliações
- 02a - Viscosidade - Funil MarshDocumento5 páginas02a - Viscosidade - Funil MarshBernardo CamposAinda não há avaliações
- Pavimento Permeavel ArquivoDocumento22 páginasPavimento Permeavel ArquivoCGE SergipeAinda não há avaliações
- 4.3 Aula 7Documento11 páginas4.3 Aula 7Samuel SantosAinda não há avaliações
- Módulo 008 - Inspeção SubmarinaDocumento8 páginasMódulo 008 - Inspeção SubmarinaPedro Guilherme SouzaAinda não há avaliações
- 11 - Derrocamento e DragagemDocumento25 páginas11 - Derrocamento e DragagemHélio JúlioAinda não há avaliações
- 6410 Guia de Coleta CETESBDocumento32 páginas6410 Guia de Coleta CETESBhelena767Ainda não há avaliações
- Engenalmarinst 40-01Documento25 páginasEngenalmarinst 40-01PamellaAinda não há avaliações
- NTS019 PDFDocumento6 páginasNTS019 PDFvinicius santosAinda não há avaliações
- Portos e Vias Navegaveis 5Documento16 páginasPortos e Vias Navegaveis 5Lana AbrantezAinda não há avaliações
- Bibliografia PraticoDocumento9 páginasBibliografia PraticoAndré Luiz Santos100% (1)
- Conteúdo Programático para As Provas Escrita e PráticoDocumento7 páginasConteúdo Programático para As Provas Escrita e PráticoRodrigo AlfanoAinda não há avaliações
- Riser e BOPDocumento13 páginasRiser e BOPSilveira VictorinoAinda não há avaliações
- Produção de Água A Bordo de NaviosDocumento49 páginasProdução de Água A Bordo de NaviosJDPNetoAinda não há avaliações
- Drenagem de Pavimentos - CorrigidoDocumento14 páginasDrenagem de Pavimentos - CorrigidoDaniel GeorgeAinda não há avaliações
- Memorial Descritivo UsinaDocumento8 páginasMemorial Descritivo UsinaRosemary BatistaAinda não há avaliações
- Barragens, Fundações e Obras de Terra PDFDocumento9 páginasBarragens, Fundações e Obras de Terra PDFSamantha Alves de VargasAinda não há avaliações
- Drenagem - REF - II - VERSAO FINALDocumento8 páginasDrenagem - REF - II - VERSAO FINALCaio SantosAinda não há avaliações
- Preparacao de Superficie para Revestimentos Anticorrosivos Alternativas, Aplicacoes e Resultados EsperadosDocumento11 páginasPreparacao de Superficie para Revestimentos Anticorrosivos Alternativas, Aplicacoes e Resultados EsperadosPedro Henrique Macedo Kumaira100% (1)
- Curso de Batimetria - EADDocumento114 páginasCurso de Batimetria - EADDanielle100% (2)
- Botetim Técnico Controle de PoeiraDocumento13 páginasBotetim Técnico Controle de PoeiraDaniel SantosAinda não há avaliações
- Inspeções Subaquáticas em Tomada D'água Dde Usinas Hidrelétricas Dom Uso de RovDocumento5 páginasInspeções Subaquáticas em Tomada D'água Dde Usinas Hidrelétricas Dom Uso de RovCarlos Alexandre TorresAinda não há avaliações
- 07 - CAP3 - ComoPnAV-702 - TÉCNICAS DE MERGULHODocumento4 páginas07 - CAP3 - ComoPnAV-702 - TÉCNICAS DE MERGULHOCristian Hansen KleinAinda não há avaliações
- Modulo 6 - ImpermeabilizaçõesDocumento29 páginasModulo 6 - ImpermeabilizaçõesSuelen C. LimaAinda não há avaliações
- Revista Esfera Tecnologia v06 n01 Artigo04Documento23 páginasRevista Esfera Tecnologia v06 n01 Artigo04Thiago FerrazAinda não há avaliações
- Relatório Top Esp. Ii-Fco Alessandro 472701Documento5 páginasRelatório Top Esp. Ii-Fco Alessandro 472701ana luisaAinda não há avaliações
- Estudo de Caso - ImpermeabilizaçãoDocumento11 páginasEstudo de Caso - ImpermeabilizaçãoMariana OliveiraAinda não há avaliações
- Cassia Peixoto Da Silva Pessoa - ROVDocumento83 páginasCassia Peixoto Da Silva Pessoa - ROVRaisa AlvesAinda não há avaliações
- Dutos para Extração de Petroleo. Santos, Gomes, NogueiraDocumento5 páginasDutos para Extração de Petroleo. Santos, Gomes, NogueiramariliaAinda não há avaliações
- Estudo Das Áreas de Manobra Nos PortosDocumento9 páginasEstudo Das Áreas de Manobra Nos PortosandressareisAinda não há avaliações
- REL-Cáculo Dos Fatores de Concentração de TensãoDocumento3 páginasREL-Cáculo Dos Fatores de Concentração de TensãoClaudia Lemos RochaAinda não há avaliações
- OCEANICA - HORÃ - RIO - 2024 - 1 HorarioDocumento4 páginasOCEANICA - HORÃ - RIO - 2024 - 1 HorarioClaudia Lemos RochaAinda não há avaliações
- Machine Learning Disciplina-1Documento2 páginasMachine Learning Disciplina-1Claudia Lemos RochaAinda não há avaliações
- 06 PlataformaTrollADocumento13 páginas06 PlataformaTrollAClaudia Lemos RochaAinda não há avaliações
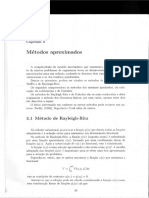
- UNICAMP Método AproximadoDocumento16 páginasUNICAMP Método AproximadoClaudia Lemos RochaAinda não há avaliações
- Ver Jogos Lotofácil - LF-PGA-010Documento1 páginaVer Jogos Lotofácil - LF-PGA-010Claudia Lemos RochaAinda não há avaliações
- Interacao Fluido Estrutura em Ambiente OffshoreDocumento80 páginasInteracao Fluido Estrutura em Ambiente OffshoreClaudia Lemos RochaAinda não há avaliações
- Protecao e Seguranca de Tanques de Armazenamento Com Teto Fixo 1Documento40 páginasProtecao e Seguranca de Tanques de Armazenamento Com Teto Fixo 1LUA TALLES DOS REIS SILVAAinda não há avaliações
- Questionário Sistema de Admissão e EscapamentoDocumento3 páginasQuestionário Sistema de Admissão e EscapamentoPedro Freitas100% (1)
- PT Training Manual PDFDocumento1.105 páginasPT Training Manual PDFHenryMac100% (1)
- Lista 07 Sistemas AbertosDocumento5 páginasLista 07 Sistemas AbertosAcer AspireAinda não há avaliações
- Apostila Do Cruze PDFDocumento45 páginasApostila Do Cruze PDFIomar Sousa94% (17)
- Bicos InjectoresDocumento55 páginasBicos InjectoresWalter BernardoAinda não há avaliações
- Motor A Reação IIDocumento56 páginasMotor A Reação IIDanny Tombstone MelloAinda não há avaliações
- Cabines de Jato - AncoblastDocumento6 páginasCabines de Jato - Ancoblastmaria costaAinda não há avaliações
- 15 Sistema de LubrificaçãoDocumento4 páginas15 Sistema de LubrificaçãoDaniel ArnoldAinda não há avaliações
- Simulado 1 - Grupo MotopropulsorDocumento4 páginasSimulado 1 - Grupo MotopropulsorGilberto AssisAinda não há avaliações
- Manual para Helicoptero em Simuladores PDFDocumento21 páginasManual para Helicoptero em Simuladores PDFKEVAP2013Ainda não há avaliações
- Resumos Dos Capítulos 17 - 19 A Era Dos ExtremosDocumento5 páginasResumos Dos Capítulos 17 - 19 A Era Dos ExtremosJoao Victor CunhaAinda não há avaliações
- Chave Da SabedoriaDocumento124 páginasChave Da SabedoriaErick MagnusAinda não há avaliações
- Tudo Sobre TurbosDocumento4 páginasTudo Sobre TurbosHallisson ArrudaAinda não há avaliações
- Exercícios Jato de ÁguaDocumento13 páginasExercícios Jato de ÁguagustavoAinda não há avaliações
- 3.5 - TurbinasDocumento49 páginas3.5 - TurbinasLUCAS SANTOSAinda não há avaliações
- QUESTIONARIO DE PPI-procedimentos de Pista Com RespostasDocumento3 páginasQUESTIONARIO DE PPI-procedimentos de Pista Com RespostasPedro Freitas100% (1)
- Apostila Inicial Hyaluron Pen Monique Alterac o Es Finais - SetembroDocumento25 páginasApostila Inicial Hyaluron Pen Monique Alterac o Es Finais - SetembroTatianeAinda não há avaliações
- Cap4 - Agitação e Mistura - 15 - 1 PDFDocumento53 páginasCap4 - Agitação e Mistura - 15 - 1 PDFarilson100% (1)
- História Da Aviação e A EngenhariaDocumento206 páginasHistória Da Aviação e A EngenhariaGabriel Roberto OliveiraAinda não há avaliações
- Manual - IbqDocumento6 páginasManual - IbqFausto100% (1)
- Simulado GMP Com GabaritoDocumento14 páginasSimulado GMP Com GabaritoSoulFalconAinda não há avaliações
- Bomba de Lavar de Pistões - JACTODocumento10 páginasBomba de Lavar de Pistões - JACTOAntônio MiguelAinda não há avaliações
- Sistema de Superalimentação de Veículos1 PDFDocumento15 páginasSistema de Superalimentação de Veículos1 PDFpaulorp78Ainda não há avaliações
- Aula 11Documento17 páginasAula 11Robson Vilas BoasAinda não há avaliações
- Aula Motor Pt6a 34Documento69 páginasAula Motor Pt6a 34Leandro DominguesAinda não há avaliações
- Testes Conhecimentos Tecnicos e MotoresDocumento40 páginasTestes Conhecimentos Tecnicos e MotoresSéries no YouTube100% (1)
- Marlly Allvez - Exercício Avaliativo 2 - NR 12 (Introdução), NR 13 e Soldagem (NR 18)Documento3 páginasMarlly Allvez - Exercício Avaliativo 2 - NR 12 (Introdução), NR 13 e Soldagem (NR 18)Marlon Ribeiro Soares mrs9Ainda não há avaliações
- Nave OvniDocumento9 páginasNave OvniIvan OlivaAinda não há avaliações
- Tradução Manual Peak 150Documento31 páginasTradução Manual Peak 150Escoura100% (1)
- The Stress Analysis of Pressure Vessels and Pressure Vessel Components: International Series of Monographs in Mechanical EngineeringNo EverandThe Stress Analysis of Pressure Vessels and Pressure Vessel Components: International Series of Monographs in Mechanical EngineeringS. S. GillNota: 3.5 de 5 estrelas3.5/5 (3)
- Combustion Chambers for Jet Propulsion Engines: International Series of Monographs in Aeronautics and AstronauticsNo EverandCombustion Chambers for Jet Propulsion Engines: International Series of Monographs in Aeronautics and AstronauticsNota: 1.5 de 5 estrelas1.5/5 (2)
- Pass Ultrasound Physics Exam Review Match the AnswersNo EverandPass Ultrasound Physics Exam Review Match the AnswersNota: 4 de 5 estrelas4/5 (4)
- Instrument Technology: Measurement of Pressure, Level, Flow and TemperatureNo EverandInstrument Technology: Measurement of Pressure, Level, Flow and TemperatureNota: 4 de 5 estrelas4/5 (1)
- Understanding Process Equipment for Operators and EngineersNo EverandUnderstanding Process Equipment for Operators and EngineersNota: 4.5 de 5 estrelas4.5/5 (3)
- Arteriosclerosis and Hypertension: with Chapters on Blood Pressure, 3rd Edition.No EverandArteriosclerosis and Hypertension: with Chapters on Blood Pressure, 3rd Edition.Ainda não há avaliações
- Pass Ultrasound Physics Exam Study Guide ReviewNo EverandPass Ultrasound Physics Exam Study Guide ReviewNota: 4.5 de 5 estrelas4.5/5 (2)
- Acrylic Painting: What You Need to Know When Learning How to Paint With AcrylicsNo EverandAcrylic Painting: What You Need to Know When Learning How to Paint With AcrylicsNota: 3.5 de 5 estrelas3.5/5 (4)
- Automotive Paints and CoatingsNo EverandAutomotive Paints and CoatingsHans-Joachim StreitbergerAinda não há avaliações
- An Atlas of Neonatal Brain Sonography, 2nd EditionNo EverandAn Atlas of Neonatal Brain Sonography, 2nd EditionNota: 5 de 5 estrelas5/5 (5)
- Artifacts in Diagnostic Ultrasound: Grayscale ArtifactsNo EverandArtifacts in Diagnostic Ultrasound: Grayscale ArtifactsAinda não há avaliações
- Scramjets: Fuel Mixing and Injection SystemsNo EverandScramjets: Fuel Mixing and Injection SystemsAinda não há avaliações
- Pressure Garments: A Manual on Their Design and FabricationNo EverandPressure Garments: A Manual on Their Design and FabricationAinda não há avaliações
- Pressure Vessels Field Manual: Common Operating Problems and Practical SolutionsNo EverandPressure Vessels Field Manual: Common Operating Problems and Practical SolutionsNota: 4 de 5 estrelas4/5 (12)
- Mechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestNo EverandMechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestAinda não há avaliações
- Entertaining Science Experiments with Everyday ObjectsNo EverandEntertaining Science Experiments with Everyday ObjectsNota: 4 de 5 estrelas4/5 (10)
- The Physics and Technology of Diagnostic Ultrasound: A Practitioner's Guide (Second Edition)No EverandThe Physics and Technology of Diagnostic Ultrasound: A Practitioner's Guide (Second Edition)Ainda não há avaliações