Você também pode gostar
- TIKUNADocumento22 páginasTIKUNAPMRB1021Ainda não há avaliações
- Subsea Inspection ROVDocumento8 páginasSubsea Inspection ROVPedro Guilherme SouzaAinda não há avaliações
- Análise da confiabilidade de BOPs submarinos em operações de perfuraçãoDocumento210 páginasAnálise da confiabilidade de BOPs submarinos em operações de perfuraçãoelkbonggAinda não há avaliações
- Inspeção visual submarina: técnicas e aplicaçõesDocumento162 páginasInspeção visual submarina: técnicas e aplicaçõesMarcos OLIVEIRAAinda não há avaliações
- Cassia Peixoto Da Silva Pessoa - ROVDocumento83 páginasCassia Peixoto Da Silva Pessoa - ROVRaisa AlvesAinda não há avaliações
- Inspeção da integridade das estruturas fixadas em soloDocumento13 páginasInspeção da integridade das estruturas fixadas em soloBárbara Maria Pereira do AmaralAinda não há avaliações
- Controle Qualidade Aterros HidráulicosDocumento9 páginasControle Qualidade Aterros HidráulicosJhony LucioAinda não há avaliações
- ManifoldDocumento27 páginasManifoldRobertson ElmerAinda não há avaliações
- PremioJoseMachado ValeBureau MemorialDocumento10 páginasPremioJoseMachado ValeBureau MemorialPhillype LoredoAinda não há avaliações
- Planejamento e Execução de Testes de Carga Versao Jan-02Documento5 páginasPlanejamento e Execução de Testes de Carga Versao Jan-02HAMILTON PONTES PRADOAinda não há avaliações
- Limpeza e Inspeção Automatica de Dutos Submarinos Verticais (Risers)Documento10 páginasLimpeza e Inspeção Automatica de Dutos Submarinos Verticais (Risers)claudioAinda não há avaliações
- CCV RT2 Civ Out1 004 00Documento7 páginasCCV RT2 Civ Out1 004 00Jordana FurmanAinda não há avaliações
- Construção de NavioDocumento12 páginasConstrução de NavioDominique0% (1)
- Comparação de métodos de classificação de barragensDocumento8 páginasComparação de métodos de classificação de barragensÉrica GuedesAinda não há avaliações
- Investigacao Geotecnica - Aula 3-b 2013Documento13 páginasInvestigacao Geotecnica - Aula 3-b 2013Paulo H. CimaAinda não há avaliações
- TF065 M ImportanteDocumento15 páginasTF065 M ImportanteRichard Leonel Vasquez MezaAinda não há avaliações
- Thiago Paixo Gomes Dissertao 05 05 22 20230312190731981Documento101 páginasThiago Paixo Gomes Dissertao 05 05 22 20230312190731981Eric DuarteAinda não há avaliações
- PRO Helper Modificado 2Documento27 páginasPRO Helper Modificado 2Elvis marianoAinda não há avaliações
- Reconhecimento de Linha D'Água com Filtros de GaborDocumento8 páginasReconhecimento de Linha D'Água com Filtros de GaborSamuel SarAinda não há avaliações
- Serviços Tecnológicos para Segurança de BarragensDocumento47 páginasServiços Tecnológicos para Segurança de BarragensCaetano JuniorAinda não há avaliações
- Criterios para Fixaao de Valores Limites Da Instrumentaao Civil de Barragens de Concreto e de TerraDocumento16 páginasCriterios para Fixaao de Valores Limites Da Instrumentaao Civil de Barragens de Concreto e de TerraMaria Luiza FavarãoAinda não há avaliações
- Critérios para fixação de valores limites da instrumentação de barragensDocumento16 páginasCritérios para fixação de valores limites da instrumentação de barragensJoão Carlos Silvério FerrazAinda não há avaliações
- Pesquisa e desenvolvimento de estacas héliceDocumento8 páginasPesquisa e desenvolvimento de estacas héliceMailson Queiroz100% (1)
- Inspeção de Sistemas de Ancoragem em Plataformas de PetróleoDocumento9 páginasInspeção de Sistemas de Ancoragem em Plataformas de Petróleoferreirasrodrigo27100% (1)
- Engenharia de Manutencao Aplicada A Docagem de EmbDocumento11 páginasEngenharia de Manutencao Aplicada A Docagem de EmbLucas NevesAinda não há avaliações
- Pitch Motion Mitigation of Spar Type Floating Substructure For 2016 Ocean enDocumento8 páginasPitch Motion Mitigation of Spar Type Floating Substructure For 2016 Ocean enCaio FernandesAinda não há avaliações
- Inspeção de barragens com dronesDocumento68 páginasInspeção de barragens com dronesalmeida64Ainda não há avaliações
- Apostila de TfoDocumento300 páginasApostila de TfoRonan R. GuimarãesAinda não há avaliações
- TCC22Documento43 páginasTCC22Rene LealAinda não há avaliações
- Influência Da Rigidez A Flexão de Duto Flexível Na Instalação de Módulos de Conexão Vertical em Águas ProfundasDocumento117 páginasInfluência Da Rigidez A Flexão de Duto Flexível Na Instalação de Módulos de Conexão Vertical em Águas ProfundascidadedoconcretoeacoAinda não há avaliações
- Almeida - Assis - 2017 SOLUÇÕES PARA MONITORAMENTO DE TÚNEIS FERROVIÁRIOS NA FCADocumento9 páginasAlmeida - Assis - 2017 SOLUÇÕES PARA MONITORAMENTO DE TÚNEIS FERROVIÁRIOS NA FCAPaloma CortizoAinda não há avaliações
- Gestão de riscos em docagem de graneleiro carregadoDocumento54 páginasGestão de riscos em docagem de graneleiro carregadoLessany NassiffAinda não há avaliações
- Inspeção alternativa dutos não pigáveisDocumento5 páginasInspeção alternativa dutos não pigáveisRobert EinstenAinda não há avaliações
- BOROSCOPIA, ANÁLISES TERMOGRAFIADocumento14 páginasBOROSCOPIA, ANÁLISES TERMOGRAFIAPablo FabricioAinda não há avaliações
- PremioJoseMachado ValeBureau MemorialDocumento11 páginasPremioJoseMachado ValeBureau MemorialArildo Chaves de AndradeAinda não há avaliações
- 80 Controle de Qualidade de Aterros Hidraulicos Arenosos PDFDocumento8 páginas80 Controle de Qualidade de Aterros Hidraulicos Arenosos PDFFrancisco Raimundo da SilvaAinda não há avaliações
- Analise Das Pressões Mínimas A Jusante de Comporta Tipo Segmento Invertida em Eclusas de NavegaçãoDocumento110 páginasAnalise Das Pressões Mínimas A Jusante de Comporta Tipo Segmento Invertida em Eclusas de NavegaçãoMaykel Alexandre HobmeirAinda não há avaliações
- Estrutura Casco - SoftwareDocumento9 páginasEstrutura Casco - SoftwareKerolyne SouzaAinda não há avaliações
- Validation of A FAST Semi-Submersible Floating WinDocumento31 páginasValidation of A FAST Semi-Submersible Floating WinRogério VasconcelosAinda não há avaliações
- Hidrodinâmica do Navio II: Projeto e Análise de Desempenho de EmbarcaçãoDocumento34 páginasHidrodinâmica do Navio II: Projeto e Análise de Desempenho de EmbarcaçãoRafael LucenaAinda não há avaliações
- Procedimento para execução segura de radiografia industrialDocumento8 páginasProcedimento para execução segura de radiografia industrialrenanskAinda não há avaliações
- Trabalho LaudoDocumento6 páginasTrabalho LaudoWellington LongoAinda não há avaliações
- PPCM0015-DDocumento217 páginasPPCM0015-DSalvadorAinda não há avaliações
- Obtenção de parâmetros de enrocamento para análise numérica de barragensDocumento11 páginasObtenção de parâmetros de enrocamento para análise numérica de barragensBenedito FreireAinda não há avaliações
- Projeto Zefiro: Proposta e Análise Experimental de Um Dirigível Solar de Elevada Autonomia para Monitoramento e Inspeção de Usinas Fotovoltaicas e EólicasDocumento10 páginasProjeto Zefiro: Proposta e Análise Experimental de Um Dirigível Solar de Elevada Autonomia para Monitoramento e Inspeção de Usinas Fotovoltaicas e EólicasHugo SantosAinda não há avaliações
- David Dias PereiraDocumento133 páginasDavid Dias PereiraEng-Levi Álvaro O TangedorAinda não há avaliações
- Sistema DPDocumento8 páginasSistema DPMauricio SilvaAinda não há avaliações
- Re Vista Pass a Dico 2021Documento5 páginasRe Vista Pass a Dico 2021Claudia Lemos RochaAinda não há avaliações
- Operações de Lançamento de Dutos FlexíveisDocumento69 páginasOperações de Lançamento de Dutos FlexíveiscidadedoconcretoeacoAinda não há avaliações
- Novas Ferramentas para Inspeção de Risers Tipo SCRDocumento9 páginasNovas Ferramentas para Inspeção de Risers Tipo SCRclaudioAinda não há avaliações
- Controle Executivo de Estacas Raiz A Partir de MedDocumento11 páginasControle Executivo de Estacas Raiz A Partir de MedLouistelson MoreiraAinda não há avaliações
- Tese Passive Heave Compensation MethodDocumento103 páginasTese Passive Heave Compensation MethodEduardomelloAinda não há avaliações
- Classificacao-De-Barragens-Quanto-Ao-Seu-Dano-Potencial-Associado-2018 - BUFFERDocumento10 páginasClassificacao-De-Barragens-Quanto-Ao-Seu-Dano-Potencial-Associado-2018 - BUFFERCarlaAinda não há avaliações
- Projeto de Helices de Embarcações FluviaisDocumento101 páginasProjeto de Helices de Embarcações FluviaisLucas GuesseAinda não há avaliações
- Obras de Portuárias PDFDocumento9 páginasObras de Portuárias PDFvictorvdvdAinda não há avaliações
- Intercorr2008 232Documento7 páginasIntercorr2008 232Adilmar CardozoAinda não há avaliações
- BARCO DE SUPERFÍCIE OPERADO REMOTAMENTE (2023) - Editado Parte FinalDocumento5 páginasBARCO DE SUPERFÍCIE OPERADO REMOTAMENTE (2023) - Editado Parte FinalGabriel CoutoAinda não há avaliações
- Tese Milton SoaresDocumento79 páginasTese Milton SoaresOdsoren MartinsAinda não há avaliações
- Estratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosNo EverandEstratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosAinda não há avaliações
- Acionamentos Hidráulicos E Eletro-hidráulicos IndustriaisNo EverandAcionamentos Hidráulicos E Eletro-hidráulicos IndustriaisNota: 5 de 5 estrelas5/5 (1)
- Cap 2 Conservacao de Alimentos Na RestauracaoDocumento38 páginasCap 2 Conservacao de Alimentos Na RestauracaoluischambelAinda não há avaliações
- Constituição 1988 - 2013Documento146 páginasConstituição 1988 - 2013Carlos Alexandre TorresAinda não há avaliações
- Perda de Carga em TubulacoesDocumento4 páginasPerda de Carga em TubulacoesPetrônio VieiraAinda não há avaliações
- Camaras FrigorificasDocumento21 páginasCamaras FrigorificasGabriel Rocha CordeiroAinda não há avaliações
- Carga de Gás e Balanceamento Do Sistema: Teste Contra Vazamento e Procedimento de VácuoDocumento2 páginasCarga de Gás e Balanceamento Do Sistema: Teste Contra Vazamento e Procedimento de VácuoCarlos Alexandre TorresAinda não há avaliações
- Íons de Interesse AzulDocumento28 páginasÍons de Interesse Azulwesleyadonai776Ainda não há avaliações
- CATÁLOGO Pedagógico - ImpressãoDocumento86 páginasCATÁLOGO Pedagógico - Impressãoalvesdudac2004Ainda não há avaliações
- A Origem Do RadioDocumento2 páginasA Origem Do RadioCelia EEdilvo SilvaAinda não há avaliações
- Métodos Quantitativos para NegóciosDocumento60 páginasMétodos Quantitativos para NegóciosKaren AguiarAinda não há avaliações
- Curso de Investigação Confirmatória - ABEMADocumento37 páginasCurso de Investigação Confirmatória - ABEMATecnohidro Engenharia AmbientalAinda não há avaliações
- Cobreq Catálogo Linha Leve GeralDocumento92 páginasCobreq Catálogo Linha Leve GeralLEODECIO BELO DE OLIVEIRAAinda não há avaliações
- Tutorial Programacao TPW-03Documento13 páginasTutorial Programacao TPW-03José Paulo Ramos Fernandes100% (1)
- 2075 - Configuração Do Caixa NFCEDocumento8 páginas2075 - Configuração Do Caixa NFCEJunior IfgAinda não há avaliações
- Elaborar Treinamento de SSTDocumento25 páginasElaborar Treinamento de SSTXeiraCuAinda não há avaliações
- Regula uso de ferramentas de comunicação na PM de MGDocumento5 páginasRegula uso de ferramentas de comunicação na PM de MGsergio guirra0% (1)
- Prática O MOTOR SÍNCRONO E A CORREÇÃO DO FATOR DE POTÊNCIADocumento3 páginasPrática O MOTOR SÍNCRONO E A CORREÇÃO DO FATOR DE POTÊNCIAPaulo HenriqueAinda não há avaliações
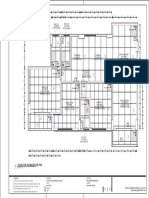
- Planta de PaginaçãoDocumento1 páginaPlanta de PaginaçãoKercia sampaioAinda não há avaliações
- Orçamento e Contabilidade Pública - Deusvaldo CarvalhoDocumento392 páginasOrçamento e Contabilidade Pública - Deusvaldo CarvalhoOdnanref Asuos LaelAinda não há avaliações
- Av Alg CDocumento6 páginasAv Alg Ccaritasmas15Ainda não há avaliações
- Trocadores de Calor: tipos e aplicaçõesDocumento35 páginasTrocadores de Calor: tipos e aplicaçõesThiago Dias BarbosaAinda não há avaliações
- Ficha de segurança para Flakeglass 500 D - Componente ADocumento10 páginasFicha de segurança para Flakeglass 500 D - Componente ASloane FreitasAinda não há avaliações
- Agricultura e AstrologiaDocumento1 páginaAgricultura e AstrologiashoxpamAinda não há avaliações
- Ficha Técnica GolDocumento1 páginaFicha Técnica GolRanieri Meireles OliveiraAinda não há avaliações
- 17 - Técnicas e boas práticas para o trabalho à distância.Documento8 páginas17 - Técnicas e boas práticas para o trabalho à distância.J3FFIN SFAinda não há avaliações
- Estudo Sobre Transdutor de Vacuo PDFDocumento11 páginasEstudo Sobre Transdutor de Vacuo PDFJoao Silva Lopes100% (4)
- RELATÓRIOS DAS AULAS PRÁTICAS - Ensaio Dos MateriaisDocumento47 páginasRELATÓRIOS DAS AULAS PRÁTICAS - Ensaio Dos MateriaisVinicius Eduardo Grigolo100% (9)
- Plano de Aula - Elevador HidráulicoDocumento4 páginasPlano de Aula - Elevador HidráulicoMichele JastrowAinda não há avaliações
- Relatório de Arrasamento de Estaca - Pype Rack 09-07Documento1 páginaRelatório de Arrasamento de Estaca - Pype Rack 09-07Eng Fabio DantasAinda não há avaliações
- Regimento Interno Condomínio Morada Recanto dos PássarosDocumento18 páginasRegimento Interno Condomínio Morada Recanto dos PássaroseguanabaraAinda não há avaliações
- Livro Ensilagem Completo BovinoDocumento72 páginasLivro Ensilagem Completo BovinoSimplicio CarvalhoAinda não há avaliações
- 1708993623Documento9 páginas1708993623lua.ndabloomAinda não há avaliações
- História da ciência forense revela pioneiros excêntricosDocumento4 páginasHistória da ciência forense revela pioneiros excêntricoscaningar outroAinda não há avaliações
- PDF - Darllan Queiroz Da SilvaDocumento48 páginasPDF - Darllan Queiroz Da SilvaGraciano emilio VaquinaAinda não há avaliações
- AUT0278 Aula 02 - Mapeamento SonoroDocumento40 páginasAUT0278 Aula 02 - Mapeamento SonoroBaixar ApostilaAinda não há avaliações
- Cilindros Hidraulicos de Grande Porte Verso Revisada1Documento24 páginasCilindros Hidraulicos de Grande Porte Verso Revisada1Carlos Santos100% (1)