Fazer download em pdf ou txt
Você também pode gostar
- LG Manual Técnico Ar Split InverterDocumento53 páginasLG Manual Técnico Ar Split Inverterdenilson carvalho guimaraes86% (7)
- Manual Autoclave HaDocumento29 páginasManual Autoclave HaMilton Camera75% (8)
- Ventilador DIXTAL DX-3012 Treinamento - 2 CalibraçãoDocumento28 páginasVentilador DIXTAL DX-3012 Treinamento - 2 CalibraçãoCRISLAYNE GUEDESAinda não há avaliações
- Vf2 - Aula Prática No ISEC (João Carlos FM)Documento22 páginasVf2 - Aula Prática No ISEC (João Carlos FM)Ivo SilvaAinda não há avaliações
- Catalogo de Pecas JF 1300 at 2020 Rev 1 200804082346Documento58 páginasCatalogo de Pecas JF 1300 at 2020 Rev 1 200804082346Junior ScudellerAinda não há avaliações
- Injetora Horizontal Romi PrimaxRDocumento24 páginasInjetora Horizontal Romi PrimaxRMrLantern100% (1)
- DEMAG - PK2 Peças SobressalentesDocumento8 páginasDEMAG - PK2 Peças Sobressalentesgqtt100% (2)
- Curso Capacitação Nr-11 e Nr-12 Segurança Na Operação e Movimentação de Caminhão HidrojatoDocumento2 páginasCurso Capacitação Nr-11 e Nr-12 Segurança Na Operação e Movimentação de Caminhão HidrojatocristianoAinda não há avaliações
- Controle de ProcessosDocumento45 páginasControle de ProcessosMateus RamosAinda não há avaliações
- Treinamento Chiller ApresentaçãoDocumento16 páginasTreinamento Chiller Apresentaçãoapnegrao100% (2)
- Checklist DE VERIFICAÇÃO DE TRABALHO EM ALTURADocumento2 páginasChecklist DE VERIFICAÇÃO DE TRABALHO EM ALTURAricardo oliveira silva100% (1)
- CONTROLE DE PROCESSOS NelsonDocumento31 páginasCONTROLE DE PROCESSOS NelsonDaniel Cardoso PereiraAinda não há avaliações
- Introdução Ao Controle AutomáticoDocumento32 páginasIntrodução Ao Controle AutomáticoEng Eletricista LarissaAinda não há avaliações
- Sintonia de Controladores Ziegler NicholsDocumento13 páginasSintonia de Controladores Ziegler NicholssmctpirassunungaAinda não há avaliações
- Cascata Slides SauloDocumento30 páginasCascata Slides SauloAlan BorgesAinda não há avaliações
- Malhas Industriais - InstrumentaçãoDocumento15 páginasMalhas Industriais - InstrumentaçãoLuiz FigueiredoAinda não há avaliações
- Controle II. Estudo e Sintonia de Controladores IndustriaisDocumento56 páginasControle II. Estudo e Sintonia de Controladores IndustriaisRoger GimenesAinda não há avaliações
- Aula 6 Controle de ProcessosDocumento20 páginasAula 6 Controle de ProcessosGustavo VianaAinda não há avaliações
- Manual de Instruções Q316C Estufa Microprocessada de CoDocumento13 páginasManual de Instruções Q316C Estufa Microprocessada de CoAmandaAinda não há avaliações
- Aula 06Documento121 páginasAula 06Rodrigo VidonsckyAinda não há avaliações
- Relatório 12 Máquinas de FluxoDocumento22 páginasRelatório 12 Máquinas de FluxoFhernanda TavaresAinda não há avaliações
- Notas de Aulas CPQ IIDocumento19 páginasNotas de Aulas CPQ IIArthur ChavesAinda não há avaliações
- Treinamento Nova Colhedora SantalDocumento288 páginasTreinamento Nova Colhedora SantalOzenildo FerrAinda não há avaliações
- Controle de ProcessosDocumento23 páginasControle de ProcessosAzgher0Ainda não há avaliações
- Manua Cassete PTDocumento60 páginasManua Cassete PTPablio SalesAinda não há avaliações
- Aula 2 - Controle - de - ProcessosDocumento59 páginasAula 2 - Controle - de - ProcessosJardeLAinda não há avaliações
- 04 Catalogo - Romi - Serie - PrimaxR - (150 - A - 1100)Documento24 páginas04 Catalogo - Romi - Serie - PrimaxR - (150 - A - 1100)riqueenzAinda não há avaliações
- 490 Evolutionary Operation PDFDocumento19 páginas490 Evolutionary Operation PDFRodrigo KawamuraAinda não há avaliações
- Controladores PID e Sua SintoniaDocumento36 páginasControladores PID e Sua Sintoniar282269zcAinda não há avaliações
- Sistemas de Medidas e Instrumentação - Parte 1Documento91 páginasSistemas de Medidas e Instrumentação - Parte 1sidpwrAinda não há avaliações
- Compensadores PIDDocumento34 páginasCompensadores PIDAline_UZAinda não há avaliações
- Pratica2 Compressores EMEI33Documento18 páginasPratica2 Compressores EMEI33Maria Elena PereiraAinda não há avaliações
- Como Selecionar Um Controlador de TemperaturaDocumento19 páginasComo Selecionar Um Controlador de TemperaturaRui MendesAinda não há avaliações
- DENSODocumento33 páginasDENSONilson BarbosaAinda não há avaliações
- Aula 01-Principais Tipos de Processos IndustriaisDocumento31 páginasAula 01-Principais Tipos de Processos IndustriaiskekewolfAinda não há avaliações
- 05 Conhecimentos Especificos Bloco IIIDocumento70 páginas05 Conhecimentos Especificos Bloco IIIMírian RibeiroAinda não há avaliações
- 1 Aula de Projeto de Controle e AutomaçãoDocumento59 páginas1 Aula de Projeto de Controle e AutomaçãohebsonbezerraAinda não há avaliações
- Palestra Denso (Diagnose)Documento33 páginasPalestra Denso (Diagnose)Ivan NobregaAinda não há avaliações
- Ar Condicionado ExperimentoDocumento32 páginasAr Condicionado ExperimentoVinicius Becker100% (1)
- Capitulo3 ConceitosbasicosdecontroleeCLP PDFDocumento12 páginasCapitulo3 ConceitosbasicosdecontroleeCLP PDFMarcelo NonatoAinda não há avaliações
- Problema de Aquecimento, Ventilação e Ar-CondicionadoDocumento15 páginasProblema de Aquecimento, Ventilação e Ar-CondicionadoAlcinéia EvangelistaAinda não há avaliações
- Manual Decafil Eco 1040 2022Documento7 páginasManual Decafil Eco 1040 2022d_biondoAinda não há avaliações
- Relatorio Teste CompressorDocumento13 páginasRelatorio Teste CompressorarthurpbdfAinda não há avaliações
- Indo Alem Do Controle PidDocumento55 páginasIndo Alem Do Controle PidricardopschichholzAinda não há avaliações
- Pratica Sintonia ControladorDocumento2 páginasPratica Sintonia ControladorSabrina Brandao RochaAinda não há avaliações
- Texto 02 - Malhas de ControleDocumento6 páginasTexto 02 - Malhas de ControleGlycia LimaAinda não há avaliações
- Introdução A Análise Simulação e Controle de ProcessosDocumento22 páginasIntrodução A Análise Simulação e Controle de ProcessosMarco Túlio Frade BorniaAinda não há avaliações
- Slide01 - Modelagem e Anlise de Sistemas Dinmicos DCA0110Documento25 páginasSlide01 - Modelagem e Anlise de Sistemas Dinmicos DCA0110Mauricio AlvesAinda não há avaliações
- Treinamento C716 Curso Especialista.Documento22 páginasTreinamento C716 Curso Especialista.Fabio Marques SchefferAinda não há avaliações
- Conceitos Básicos de Instrumentação e ControleDocumento160 páginasConceitos Básicos de Instrumentação e ControleRomulo PiresAinda não há avaliações
- Definições Instrumentação 2014Documento40 páginasDefinições Instrumentação 2014Thiago Macedo MendonçaAinda não há avaliações
- Manual Split Brastemp CleanDocumento10 páginasManual Split Brastemp CleanRicardo Ornellas0% (3)
- Aula 8 - Sistemas de Potência A GásDocumento46 páginasAula 8 - Sistemas de Potência A GásMateus Lins Dantas MatosAinda não há avaliações
- 7 Sistemas de Refrigeração e Bombas de CalorDocumento41 páginas7 Sistemas de Refrigeração e Bombas de CalorAndré Luiz Alves GuimarãesAinda não há avaliações
- CONTROLADORESDocumento23 páginasCONTROLADORESJuarse Da Olivia AineAinda não há avaliações
- Manual de Instruções LWAC 02 Rev.4Documento2 páginasManual de Instruções LWAC 02 Rev.4Rodolfo Navarro IIAinda não há avaliações
- Compressor ElginDocumento2 páginasCompressor ElginPaulo CezarAinda não há avaliações
- Documento 25 Curso AndesonDocumento9 páginasDocumento 25 Curso AndesonAnderson Chiarelli BarretoAinda não há avaliações
- 1.a Aula - CDG - Variáveis de Processo - IntroduçãoDocumento34 páginas1.a Aula - CDG - Variáveis de Processo - IntroduçãoRene LealAinda não há avaliações
- 1 - Definicoes Controle Automatico Teoria T4MDocumento13 páginas1 - Definicoes Controle Automatico Teoria T4MglauberAinda não há avaliações
- Controlador de TemperaturaDocumento12 páginasControlador de Temperaturapavanito4341Ainda não há avaliações
- Controlador Inv 54Documento2 páginasControlador Inv 54GleysonFreitasAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Sintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPNo EverandSintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPAinda não há avaliações
- Catalogo Motocana MKF8075 Serie3 - JAN 23Documento62 páginasCatalogo Motocana MKF8075 Serie3 - JAN 23douglasAinda não há avaliações
- Eletropaulo - Ec.m.s. See 1458 Ee - 15KV - ArDocumento11 páginasEletropaulo - Ec.m.s. See 1458 Ee - 15KV - ArAndré Cardozo de CastroAinda não há avaliações
- Vista Explodida e Lista de Peças Bomba Submersa Vambro 23-24 Hidráulico VBSP67-68Documento2 páginasVista Explodida e Lista de Peças Bomba Submersa Vambro 23-24 Hidráulico VBSP67-68KidjonAinda não há avaliações
- 2 Lista Exercícios Acionamentos Elétricos - 1 - 2022Documento2 páginas2 Lista Exercícios Acionamentos Elétricos - 1 - 2022Yuri MouraAinda não há avaliações
- Modulo 2 Extintores 07Documento27 páginasModulo 2 Extintores 07Fpe Sygma100% (1)
- Manual SD-200Documento22 páginasManual SD-200Grasielle PaulaAinda não há avaliações
- Redutor RV 75 - LISTA DE PEÇASDocumento2 páginasRedutor RV 75 - LISTA DE PEÇASEder FerreiraAinda não há avaliações
- Tabela de Conversão Conf. Astm E140Documento3 páginasTabela de Conversão Conf. Astm E140Fabricio Tarullo100% (1)
- Manual Aplicacao Fita AntiderrapanteDocumento2 páginasManual Aplicacao Fita AntiderrapanteAUGUSTO HENRIQUE DO CARMOAinda não há avaliações
- Esquema Eletrico C10maxDocumento6 páginasEsquema Eletrico C10maxDanielAinda não há avaliações
- Processo de LaminaçãoDocumento5 páginasProcesso de LaminaçãoHugo CarvalhoAinda não há avaliações
- Satisloh - VFT Orbit 2E Lens Generating Machine - PT - 2023Documento2 páginasSatisloh - VFT Orbit 2E Lens Generating Machine - PT - 2023Michel PizzotoAinda não há avaliações
- 1000 Derivadas Prof NazirDocumento16 páginas1000 Derivadas Prof NazirDiego FerreiraAinda não há avaliações
- Montagem Da Caixa de Engrenagens Do Picador (Estilo BDocumento31 páginasMontagem Da Caixa de Engrenagens Do Picador (Estilo BLucas PereiraAinda não há avaliações
- Tabela ParafusosDocumento15 páginasTabela ParafusosDIOGOAinda não há avaliações
- EleMaq - EC 2020-2 ID74Documento4 páginasEleMaq - EC 2020-2 ID74Fabio SoaresAinda não há avaliações
- Esquema Hidráulico-Pneumático Kit Linha Leve e MinérioDocumento1 páginaEsquema Hidráulico-Pneumático Kit Linha Leve e MinérioRODRIGO CRUZAinda não há avaliações
- Indices UrbanisticosDocumento1 páginaIndices UrbanisticosCivil Uepg 2018Ainda não há avaliações
- Catalogo Inapi 2022Documento101 páginasCatalogo Inapi 2022Renato SilvaAinda não há avaliações
- DTMII Resumo Uniao Parafusos Furo Roscado Cego Caso3Documento9 páginasDTMII Resumo Uniao Parafusos Furo Roscado Cego Caso3Andrey ConsaniAinda não há avaliações
- Pormenor de Aplicação de Ferragens Portões de CorrerDocumento52 páginasPormenor de Aplicação de Ferragens Portões de CorrerluisAinda não há avaliações
- Manual Serra de Fita Atualizado2016 OutroDocumento24 páginasManual Serra de Fita Atualizado2016 OutroWillian VieiraAinda não há avaliações
- Modelo de AprDocumento9 páginasModelo de AprLeticia CruzAinda não há avaliações
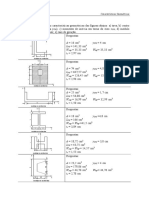
- Exercicios 03 Caracteristicas GeometricasDocumento1 páginaExercicios 03 Caracteristicas GeometricasGabryel LuizAinda não há avaliações