Você também pode gostar
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Manual de Descrição Ciclos de Torno MCS PDFDocumento17 páginasManual de Descrição Ciclos de Torno MCS PDFThiago Teixeira PiresAinda não há avaliações
- Manual Cosac NaifyDocumento79 páginasManual Cosac NaifyIngrid Romão100% (2)
- Engrenagens 2Documento134 páginasEngrenagens 2MARSILFER100% (1)
- MANUAL Instruções - Máquina de Costura Lervia KH 4000Documento30 páginasMANUAL Instruções - Máquina de Costura Lervia KH 4000diana.torres3837100% (2)
- Ligar Trava Do PicassoDocumento2 páginasLigar Trava Do PicassoRubia De Souza100% (3)
- ROBOTICA 03 B Cinematica Direta MatlabDocumento43 páginasROBOTICA 03 B Cinematica Direta MatlabRuan SantosAinda não há avaliações
- Questionário de RobóticaDocumento2 páginasQuestionário de RobóticaEriberto NunesAinda não há avaliações
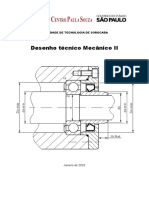
- Apostila - Desenho Técnico Mecânico - FTSDocumento161 páginasApostila - Desenho Técnico Mecânico - FTSLuiz Geraldo Dos ReisAinda não há avaliações
- Poliase CorreiasDocumento15 páginasPoliase CorreiasGuilherme 1234Ainda não há avaliações
- Poliase CorreiasDocumento15 páginasPoliase CorreiasLeonardo SicchieriAinda não há avaliações
- Apostila - Algoritimo de Sitema Denavit HartenbergDocumento12 páginasApostila - Algoritimo de Sitema Denavit HartenbergLeandroRFCostaAinda não há avaliações
- Rolamentos Koyo PDFDocumento7 páginasRolamentos Koyo PDFCleydson Vieira GomesAinda não há avaliações
- Básico de EngrenagensDocumento21 páginasBásico de EngrenagenseduserenzaAinda não há avaliações
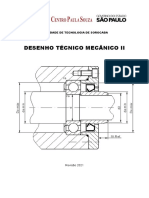
- Apostila DTMII - 2020Documento160 páginasApostila DTMII - 2020Esmael BelarminoAinda não há avaliações
- Slides - Matrizes de TransformaçãoDocumento20 páginasSlides - Matrizes de TransformaçãoLuis BarrosoAinda não há avaliações
- Elementos de Máquinas e Dispositivos MecânicosDocumento73 páginasElementos de Máquinas e Dispositivos MecânicosCarlos SampaioAinda não há avaliações
- Aula 5 - Transformao de Sistemas de Coordenadas - Parte 2Documento10 páginasAula 5 - Transformao de Sistemas de Coordenadas - Parte 2Lucas MaiaAinda não há avaliações
- 03 - Usinagem de Fusos e Eixos PDFDocumento3 páginas03 - Usinagem de Fusos e Eixos PDFotoAinda não há avaliações
- Aula Correias Polias USP 2019Documento77 páginasAula Correias Polias USP 2019gande10Ainda não há avaliações
- Slides Torno 1Documento10 páginasSlides Torno 1matheuscavallante21Ainda não há avaliações
- Aula 08 - Robótica IndustrialDocumento15 páginasAula 08 - Robótica IndustrialEDVRICAinda não há avaliações
- Parafusos (F2) Tabela de RoscaDocumento24 páginasParafusos (F2) Tabela de RoscaCARLOS AUGUSTO ALMEIDA NUNES NEMAinda não há avaliações
- PMR2201 Parafusos1-11 LopesDocumento15 páginasPMR2201 Parafusos1-11 Lopesnibetiv895Ainda não há avaliações
- NSK AgulhasDocumento36 páginasNSK AgulhasWesley Marques GonçalvesAinda não há avaliações
- 28elem, Polias e CorreiasDocumento10 páginas28elem, Polias e CorreiasBruno BatistaAinda não há avaliações
- Interação de Contato Do Par Roda-TrilhoDocumento11 páginasInteração de Contato Do Par Roda-TrilhoJosé Luiz BorbaAinda não há avaliações
- Cinemática Direta PDFDocumento25 páginasCinemática Direta PDFValdemir NetoAinda não há avaliações
- Apostila DTMII - Revisão 2021Documento160 páginasApostila DTMII - Revisão 2021lks13Ainda não há avaliações
- 1-AULA SENAI Sistema de CoordenadasDocumento17 páginas1-AULA SENAI Sistema de CoordenadasFabricio MendesAinda não há avaliações
- Treinamento Correção de OffsetDocumento37 páginasTreinamento Correção de OffsetJonathann SouzaAinda não há avaliações
- Teste 0850Documento8 páginasTeste 0850Margarida PaixãoAinda não há avaliações
- Introducao A Cinematic ADocumento42 páginasIntroducao A Cinematic AFabrício FerrarinAinda não há avaliações
- Elementos de Máquinas - Prova 1Documento112 páginasElementos de Máquinas - Prova 1José AnaniasAinda não há avaliações
- Documento de Referência - BRB-ST5Documento13 páginasDocumento de Referência - BRB-ST5Reinaldo SilvaAinda não há avaliações
- Fresadora ISODocumento22 páginasFresadora ISOAmérico Costa100% (1)
- AULA 12 Método de Denavit - HartenbergDocumento34 páginasAULA 12 Método de Denavit - HartenbergWASHINGTONAinda não há avaliações
- Aula 15-Introducao Aos Motores de Indução Trifasico-MITsDocumento22 páginasAula 15-Introducao Aos Motores de Indução Trifasico-MITsAlex MartinelliAinda não há avaliações
- Guia Prático de Programação CNC Masc 9Documento87 páginasGuia Prático de Programação CNC Masc 9zanon02Ainda não há avaliações
- BacklashDocumento24 páginasBacklashMarcelo GamaAinda não há avaliações
- Prejeto RobôDocumento8 páginasPrejeto RobôRobotica spAinda não há avaliações
- Capítulo 4 - ParafDocumento68 páginasCapítulo 4 - Parafadryan rodriguesAinda não há avaliações
- PROGRAMADOR (Apresentação Fanuc)Documento136 páginasPROGRAMADOR (Apresentação Fanuc)Cnc Page100% (2)
- Aula 5 - Eom II - Engrenagens Cilíndricas de Dentes HelicoidaisDocumento37 páginasAula 5 - Eom II - Engrenagens Cilíndricas de Dentes HelicoidaisMarcosAinda não há avaliações
- ParafusoDocumento70 páginasParafusoRegiane SenaAinda não há avaliações
- TP 01 - Exercicios de Aplicacao PDFDocumento29 páginasTP 01 - Exercicios de Aplicacao PDFIgor Schmidt0% (1)
- FornoDocumento147 páginasFornoCláudio FortesAinda não há avaliações
- Dps SiemensDocumento1 páginaDps SiemensMarcelo CoutinhoAinda não há avaliações
- R69001D - Manual de Prog e OperDocumento217 páginasR69001D - Manual de Prog e OperValdair Jose De SouzaAinda não há avaliações
- Roscas (Noções - Tipos - Nomenclatura)Documento19 páginasRoscas (Noções - Tipos - Nomenclatura)Fillipe Rodrigues S100% (4)
- Aula 8 - RoscasDocumento39 páginasAula 8 - RoscasAriel CamposAinda não há avaliações
- Modulos CombinacionaisDocumento50 páginasModulos CombinacionaisSuelanny CarvalhoAinda não há avaliações
- 924G 924Gz Wheel Loader DDA00001-03916 (MACHINE) POWERED BY 3056E Engine (SEBP3524 - 101) - DocumentaçãoDocumento7 páginas924G 924Gz Wheel Loader DDA00001-03916 (MACHINE) POWERED BY 3056E Engine (SEBP3524 - 101) - DocumentaçãoThalyson LourramAinda não há avaliações
- Captura de Tela 2022-10-05 À(s) 10.57.09 PDFDocumento120 páginasCaptura de Tela 2022-10-05 À(s) 10.57.09 PDFVlauber CostaAinda não há avaliações
- Catálogo Elevador Residencial 2017 02Documento14 páginasCatálogo Elevador Residencial 2017 02Vlauber CostaAinda não há avaliações
- Catálogo de Peças para Consulta Rápida-Ind3Documento150 páginasCatálogo de Peças para Consulta Rápida-Ind3Vlauber Costa100% (2)
- Modelagem Motor CC PDFDocumento5 páginasModelagem Motor CC PDFVlauber CostaAinda não há avaliações
- Puma 560Documento25 páginasPuma 560Vlauber CostaAinda não há avaliações
- Slide 3 Cinematica DiretaDocumento73 páginasSlide 3 Cinematica DiretaVlauber CostaAinda não há avaliações
- Simbologia de Componentes de Um Sistema GTDDocumento11 páginasSimbologia de Componentes de Um Sistema GTDVlauber CostaAinda não há avaliações
- Simbologia Isa 5.1Documento49 páginasSimbologia Isa 5.1Vlauber Costa100% (1)
- Módulo 4 - Minutos de RevisãoDocumento5 páginasMódulo 4 - Minutos de RevisãoVinicius AndrioliAinda não há avaliações
- RT430 RT434 Gnss TM PT HWB 8v8Documento108 páginasRT430 RT434 Gnss TM PT HWB 8v8djalmasaAinda não há avaliações
- Atividade Introdução LadderDocumento2 páginasAtividade Introdução Ladderwelltonarruda0% (1)
- Codigos Secretos LenovoDocumento3 páginasCodigos Secretos LenovoRomulo Oliveira Araujo0% (1)
- Respostas Do Questionário de InformaticaDocumento5 páginasRespostas Do Questionário de InformaticaEmanoel SantosAinda não há avaliações
- PDF 00 - Simulados - Direito PenalDocumento3 páginasPDF 00 - Simulados - Direito Penalb ferreiraAinda não há avaliações
- Dados Do Relé 6104Documento43 páginasDados Do Relé 6104laiseAinda não há avaliações
- Transito de Energia e Estimação de EstadoDocumento18 páginasTransito de Energia e Estimação de EstadoHelder RamadãoAinda não há avaliações
- Prova Gerenciamento Do Tempo FGVDocumento271 páginasProva Gerenciamento Do Tempo FGVLorena BarretoAinda não há avaliações
- ISP Padrão Montando Seu Provedor MikroTik RouterOS Leonardo RosaDocumento24 páginasISP Padrão Montando Seu Provedor MikroTik RouterOS Leonardo RosaDvcd ObqAinda não há avaliações
- 04 Projeto Churrasco Dos Sonhos Introdução Ao Ms Project Guia 01Documento61 páginas04 Projeto Churrasco Dos Sonhos Introdução Ao Ms Project Guia 01LeuspAinda não há avaliações
- Registro Nacional de Transportes Rodoviários de Cargas - RNTRCDocumento1 páginaRegistro Nacional de Transportes Rodoviários de Cargas - RNTRCPUD FedexAinda não há avaliações
- TCC FinalDocumento254 páginasTCC FinalrodrigosticpaAinda não há avaliações
- Seguro Desemprego e FGTSDocumento7 páginasSeguro Desemprego e FGTSRONNY ALBUQUERQUEAinda não há avaliações
- Tamanho Da AmostraDocumento6 páginasTamanho Da AmostraHORUS_KHAN100% (1)
- Faça Sua Lanterna de LED para MotoDocumento10 páginasFaça Sua Lanterna de LED para MotoHudson PinheiroAinda não há avaliações
- Apostila de Aula - Administrativo InformatizadoDocumento142 páginasApostila de Aula - Administrativo InformatizadoFernando CíceroAinda não há avaliações
- 199 - Evo W108AR PORDocumento8 páginas199 - Evo W108AR PORAKHENATON89Ainda não há avaliações
- Desenvolvimento Web Com HTML, CSS e JavaScript by CaelumDocumento399 páginasDesenvolvimento Web Com HTML, CSS e JavaScript by CaelumSaruboy GamerAinda não há avaliações
- Comunicação No Contexto Da Aviação - Contribuições Da PsicologiaDocumento8 páginasComunicação No Contexto Da Aviação - Contribuições Da PsicologiaRenata CoelhoAinda não há avaliações
- 5W2H 18 09 17Documento13 páginas5W2H 18 09 17coriolano_filgueirasAinda não há avaliações
- Autocad Cap 9 PDFDocumento46 páginasAutocad Cap 9 PDFVitor HugoAinda não há avaliações
- Manual Juno G Keyboard-Portuguese PDFDocumento253 páginasManual Juno G Keyboard-Portuguese PDFRheinschmitt1Ainda não há avaliações
- IT G 09 001 - Check List 058 - Rev 02 - Retífica Elétrica e PneumáticaDocumento2 páginasIT G 09 001 - Check List 058 - Rev 02 - Retífica Elétrica e PneumáticaHomero VerissimoAinda não há avaliações
- 2075 - Guia de UsoDocumento76 páginas2075 - Guia de UsoRodrigo Soares GuimaraesAinda não há avaliações
- Avon RevistaDocumento88 páginasAvon RevistaApostoloFlavioHenriqueAinda não há avaliações
- Tcd-73c-A - 1v2r2aDocumento11 páginasTcd-73c-A - 1v2r2aSidnei Da Silva ReisAinda não há avaliações
- Graficos ScilabDocumento16 páginasGraficos ScilabPedro BastosAinda não há avaliações