Você também pode gostar
- Opercional dolARDocumento15 páginasOpercional dolARCarlos Eduardo Guerra100% (1)
- Apostila de Eletroeletronica II Ed. 5Documento40 páginasApostila de Eletroeletronica II Ed. 5Tiago Santos Silva100% (1)
- Atividade Remota de Matemática N 01 - 6º AnoDocumento4 páginasAtividade Remota de Matemática N 01 - 6º AnoNormandes MoreiraAinda não há avaliações
- Sensores de PresençaDocumento19 páginasSensores de PresençaLuana BrasilAinda não há avaliações
- AlarmeDocumento4 páginasAlarmeAmerco TivaneAinda não há avaliações
- Luz Noturna Automática Com Relé PDFDocumento21 páginasLuz Noturna Automática Com Relé PDFHermínio Araujo0% (1)
- LIVRO O PROCESSO DIAGNÓSTICO E AS TÉCNICAS PROJETIVAS - OdtDocumento2 páginasLIVRO O PROCESSO DIAGNÓSTICO E AS TÉCNICAS PROJETIVAS - OdtMarianna Matos0% (1)
- Apresentação ProjectoDocumento17 páginasApresentação ProjectoAmerco Tivane100% (2)
- Torneira AutomáticaDocumento6 páginasTorneira AutomáticaliderasasAinda não há avaliações
- Sensores e Actuadores InteligentesDocumento12 páginasSensores e Actuadores InteligentesMilupa7Ainda não há avaliações
- Apostila OptoacopladoresDocumento10 páginasApostila OptoacopladoresAlejandro Perez AvilaAinda não há avaliações
- Apostila de SensoresDocumento93 páginasApostila de SensoresAna Carolina Kutika67% (3)
- Mediação de Conflitos - Fichamento Do Livro de Lilia Maria de Morais SalesDocumento54 páginasMediação de Conflitos - Fichamento Do Livro de Lilia Maria de Morais SalesMarcelo Sales100% (3)
- Maria Lucia Medeiros PDFDocumento20 páginasMaria Lucia Medeiros PDFluciana_kraemer498100% (1)
- Sensores ÓticosDocumento15 páginasSensores ÓticosalanjprAinda não há avaliações
- Sensores Leitura Ótica e ComparadorDocumento1 páginaSensores Leitura Ótica e ComparadorYoseph MichaelAinda não há avaliações
- Casa InteligenteDocumento7 páginasCasa InteligenteEmanuel da Silva0% (1)
- Aula 02 e LETRONICAa DQUISICIONDocumento74 páginasAula 02 e LETRONICAa DQUISICIONmecatronicaferaAinda não há avaliações
- RELATÓRIO PRÁTICA 19-10.finalDocumento9 páginasRELATÓRIO PRÁTICA 19-10.finalOniAinda não há avaliações
- Sensor de Obstáculo InfravermelhoDocumento10 páginasSensor de Obstáculo InfravermelhoAndré AmorimAinda não há avaliações
- Eletrônica - Esquemas de Fontes de Alimentação PDFDocumento2 páginasEletrônica - Esquemas de Fontes de Alimentação PDFFilipe Marques Macedo100% (1)
- Relatório Sensor InfravermelhoDocumento4 páginasRelatório Sensor InfravermelhoIgor BarbosaAinda não há avaliações
- Sensores de ProximidadeDocumento20 páginasSensores de ProximidadeHumberto Medeiros CordeiroAinda não há avaliações
- Relatorio Certo AtualizadoDocumento15 páginasRelatorio Certo AtualizadoLuiz Gustavo Oliveira MartinsAinda não há avaliações
- COMO TESTAR IGBTsDocumento7 páginasCOMO TESTAR IGBTsMcbborba100% (1)
- Sensor de Proximidade SimplesDocumento5 páginasSensor de Proximidade Simplescefs2011Ainda não há avaliações
- Sensores Atuadores e VálvulasDocumento21 páginasSensores Atuadores e VálvulasRodolfo ChagasAinda não há avaliações
- 07 - Diodo, LED e FotodiodoDocumento21 páginas07 - Diodo, LED e Fotodiodoreis emperor100% (2)
- Circuito de Sensor de Luz Com LDR e Relé - LM311Documento2 páginasCircuito de Sensor de Luz Com LDR e Relé - LM311noahkrpgAinda não há avaliações
- Sensor FototransistorDocumento11 páginasSensor FototransistorkelsonsaraivaAinda não há avaliações
- Sensor de Sombra: Out inDocumento6 páginasSensor de Sombra: Out inricarddorochaAinda não há avaliações
- Reles de Estado Solido e OptoacopladoresDocumento10 páginasReles de Estado Solido e OptoacopladoreswallersonaAinda não há avaliações
- UFCD 6071 - Ficha de Trabalho 3 - LDR - Light-Dependent ResistorDocumento10 páginasUFCD 6071 - Ficha de Trabalho 3 - LDR - Light-Dependent ResistorManuel FernandesAinda não há avaliações
- Sensor de Proximidade Infravermelho2Documento10 páginasSensor de Proximidade Infravermelho2Julio AlvesAinda não há avaliações
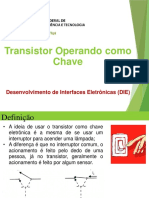
- DIE - 04 Transistor Operando Como ChaveDocumento37 páginasDIE - 04 Transistor Operando Como ChavePaulo José da SilvaAinda não há avaliações
- Acionamento de CargasDocumento8 páginasAcionamento de CargasJeferson CarvalhoAinda não há avaliações
- Aula 2 Automacao Industrial IDocumento84 páginasAula 2 Automacao Industrial IMarcelo Lima CardosoAinda não há avaliações
- Sensor de RefletânciaDocumento4 páginasSensor de RefletânciaThiago Felipe Soares GonçalvesAinda não há avaliações
- Manual DK-8 Instalações ElétricasDocumento38 páginasManual DK-8 Instalações ElétricasFrancisco MeloAinda não há avaliações
- Conheça o LM3914 (ART087)Documento12 páginasConheça o LM3914 (ART087)ElizeuAinda não há avaliações
- Alarme Fotoelétrico Residencial (ART1530) PDFDocumento7 páginasAlarme Fotoelétrico Residencial (ART1530) PDFSabrynna SilvaAinda não há avaliações
- Trabalho Prático Nº3 SensorDocumento7 páginasTrabalho Prático Nº3 SensorZé Miguel OliveiraAinda não há avaliações
- Relatório de Atividade Prática TransistoresDocumento3 páginasRelatório de Atividade Prática TransistoresJulio Cesar JauerAinda não há avaliações
- Relatório01 29-09-2022Documento4 páginasRelatório01 29-09-2022Pedro Lucas luzAinda não há avaliações
- Relatório Multivibrador AstavelDocumento13 páginasRelatório Multivibrador AstavelAndré Campos FariaAinda não há avaliações
- Apostila de Interfaces Entre Circuitos de Potência e de ControleDocumento9 páginasApostila de Interfaces Entre Circuitos de Potência e de ControlegabrielmortensenAinda não há avaliações
- Experimento - 07 - Transistor Como Chave Acionando Um Relé PDFDocumento2 páginasExperimento - 07 - Transistor Como Chave Acionando Um Relé PDFVitor NogueiraAinda não há avaliações
- Roteiro 4Documento4 páginasRoteiro 4Lucas MarksAinda não há avaliações
- Capitulo 4Documento7 páginasCapitulo 4Jose NarciAinda não há avaliações
- FotodiodoDocumento3 páginasFotodiodoHenderson SouzaAinda não há avaliações
- RELATÓRIODocumento7 páginasRELATÓRIOJVPRAinda não há avaliações
- Alarme No WordDocumento6 páginasAlarme No WordDaniel Carlos ValencioAinda não há avaliações
- PRJ-412 Projeto Utilizando Sensores - Grupo Caroline CCDocumento7 páginasPRJ-412 Projeto Utilizando Sensores - Grupo Caroline CCIgor BarbosaAinda não há avaliações
- Relatório Da Montagem #4-2Documento8 páginasRelatório Da Montagem #4-2Dalena CostaAinda não há avaliações
- Circuito de Indutímetro DigitalDocumento3 páginasCircuito de Indutímetro DigitalemilianxxAinda não há avaliações
- Conheça o LM3914 (ART087)Documento12 páginasConheça o LM3914 (ART087)valdir_azevedo_11Ainda não há avaliações
- Transistores - Saturação e CorteDocumento7 páginasTransistores - Saturação e CorteLucas HenriqueAinda não há avaliações
- Hardware DarioDocumento58 páginasHardware DarioLAURO AUGUSTOAinda não há avaliações
- 01 - Equipamentos e SemicondutoresDocumento10 páginas01 - Equipamentos e SemicondutoresUislley PereiraAinda não há avaliações
- Curso Online: Eletrônica Básica para Bancada de LaboratórioDocumento27 páginasCurso Online: Eletrônica Básica para Bancada de LaboratórioMArcos EmanuelAinda não há avaliações
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XviiiNo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XviiiAinda não há avaliações
- Fisiologia Humana - Importancia Do SonoDocumento11 páginasFisiologia Humana - Importancia Do SonoAmerco TivaneAinda não há avaliações
- Crescimento MicrobrianoDocumento11 páginasCrescimento MicrobrianoAmerco TivaneAinda não há avaliações
- ManutencaoDocumento9 páginasManutencaoAmerco Tivane0% (1)
- Aula7-Perdas MITDocumento15 páginasAula7-Perdas MITAmerco TivaneAinda não há avaliações
- Etica SocialDocumento9 páginasEtica SocialAmerco TivaneAinda não há avaliações
- Abdenigo ProjectoDocumento35 páginasAbdenigo ProjectoAmerco TivaneAinda não há avaliações
- Automacao EletropneumaticaDocumento8 páginasAutomacao EletropneumaticaAmerco TivaneAinda não há avaliações
- Deminsionamento Do Regulador e FiltroDocumento22 páginasDeminsionamento Do Regulador e FiltroAmerco TivaneAinda não há avaliações
- AntenasDocumento3 páginasAntenasAmerco TivaneAinda não há avaliações
- Controlo Automatico Do Motor Com Sensor InfravermelhoDocumento9 páginasControlo Automatico Do Motor Com Sensor InfravermelhoAmerco TivaneAinda não há avaliações
- AlarmeDocumento4 páginasAlarmeAmerco TivaneAinda não há avaliações
- Inversor de FrequenciaDocumento3 páginasInversor de FrequenciaAmerco TivaneAinda não há avaliações
- Circuito Electronico IndustrialDocumento8 páginasCircuito Electronico IndustrialAmerco TivaneAinda não há avaliações
- CaracterísticasDocumento2 páginasCaracterísticasAmerco TivaneAinda não há avaliações
- Circuito Electronico IndustrialDocumento8 páginasCircuito Electronico IndustrialAmerco TivaneAinda não há avaliações
- DiagnosticoDocumento8 páginasDiagnosticoAmerco TivaneAinda não há avaliações
- SemaforoDocumento6 páginasSemaforoAmerco TivaneAinda não há avaliações
- Deminsionamento Do Regulador e FiltroDocumento22 páginasDeminsionamento Do Regulador e FiltroAmerco TivaneAinda não há avaliações
- Automacao EletropneumaticaDocumento8 páginasAutomacao EletropneumaticaAmerco TivaneAinda não há avaliações
- Sumativa 2 ProfiCADDocumento8 páginasSumativa 2 ProfiCADAmerco TivaneAinda não há avaliações
- Trabalho de Didáctica Geral 2 UCMDocumento16 páginasTrabalho de Didáctica Geral 2 UCMAmerco TivaneAinda não há avaliações
- Motor ElectricoDocumento6 páginasMotor ElectricoAmerco TivaneAinda não há avaliações
- Tipos de Flip FlopsDocumento12 páginasTipos de Flip FlopsAmerco TivaneAinda não há avaliações
- Portas LógicasDocumento7 páginasPortas LógicasAmerco TivaneAinda não há avaliações
- ManutencaoDocumento9 páginasManutencaoAmerco Tivane0% (1)
- Carga ElétricaDocumento13 páginasCarga ElétricaAmerco TivaneAinda não há avaliações
- TTL e CmosDocumento2 páginasTTL e CmosAmerco TivaneAinda não há avaliações
- Berenice CoutoDocumento13 páginasBerenice CoutoMayéwe AlvesAinda não há avaliações
- Revista Projeto Autoestima 31Documento107 páginasRevista Projeto Autoestima 31Natan Oliveira FerreiraAinda não há avaliações
- Relatório de Área LimpaDocumento45 páginasRelatório de Área LimpaEdson RamosAinda não há avaliações
- Formas de ConhecimentoDocumento6 páginasFormas de ConhecimentoMARCIOAinda não há avaliações
- EtnocentrismoDocumento5 páginasEtnocentrismocarollAinda não há avaliações
- Plano de Aula SoldadoDocumento4 páginasPlano de Aula SoldadoDalila Vieira100% (1)
- Curso Tales - Análise Combinatória e ProbabilidadeDocumento22 páginasCurso Tales - Análise Combinatória e ProbabilidadeGabriel Caleb CandidoAinda não há avaliações
- Especificações: InicarregadeiraDocumento4 páginasEspecificações: InicarregadeiraNERDZONE TVAinda não há avaliações
- Psicologia PDFDocumento25 páginasPsicologia PDFKatia LuzAinda não há avaliações
- GruasDocumento24 páginasGruasCatarina JesusAinda não há avaliações
- Diverfoam DG VK 52Documento2 páginasDiverfoam DG VK 52VitoriaAinda não há avaliações
- Questões Resolvidos - CisalhamentoDocumento10 páginasQuestões Resolvidos - CisalhamentoGustavo AguiarAinda não há avaliações
- CFT B 2008 Arrumador PDFDocumento14 páginasCFT B 2008 Arrumador PDFRenato Da CruzAinda não há avaliações
- Embriologia 2013 Distribuicao de ViteloDocumento21 páginasEmbriologia 2013 Distribuicao de ViteloSabrina AraujoAinda não há avaliações
- 11783-Texto Do Artigo-43540-1-10-20191001Documento5 páginas11783-Texto Do Artigo-43540-1-10-20191001andressa.estevesAinda não há avaliações
- Plano Desenvolvimento Er 201 Gestão Sust 2S 2022Documento5 páginasPlano Desenvolvimento Er 201 Gestão Sust 2S 2022Luciano Fonseca NetoAinda não há avaliações
- A Importância Da Família PDFDocumento7 páginasA Importância Da Família PDFWellington FariaAinda não há avaliações
- Requisitosnofuncionaispara Jogos DigitaisDocumento5 páginasRequisitosnofuncionaispara Jogos DigitaisLebe RibeiroAinda não há avaliações
- Aula Cogus ProntoDocumento18 páginasAula Cogus ProntoDaniela Dalke WeberAinda não há avaliações
- Edital Verticalizado PCCE PDFDocumento5 páginasEdital Verticalizado PCCE PDFJoicelancaster LancasterAinda não há avaliações
- Reconhecimento de Linha de Água para Medição de CaladoDocumento8 páginasReconhecimento de Linha de Água para Medição de CaladoSamuel SarAinda não há avaliações
- Modelo de RNCDocumento3 páginasModelo de RNCLeandro EduardoAinda não há avaliações
- Limpeza Pesada Uau Alta Performance 4 EM1: Ficha de Informações de Segurança de Produtos QuímicosDocumento6 páginasLimpeza Pesada Uau Alta Performance 4 EM1: Ficha de Informações de Segurança de Produtos QuímicosNicoli MartinsAinda não há avaliações
- A Organização em Análise Contribuições Da PsicanáliseDocumento3 páginasA Organização em Análise Contribuições Da PsicanáliseStefanyF25Ainda não há avaliações
- 11 FT 2 Frei Luis Sousa 2perDocumento3 páginas11 FT 2 Frei Luis Sousa 2perHenrique AlvesAinda não há avaliações