Escolar Documentos
Profissional Documentos
Cultura Documentos
Treinamento Básico Excel e Ex800 VVVF
Enviado por
cley marcosDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Treinamento Básico Excel e Ex800 VVVF
Enviado por
cley marcosDireitos autorais:
Formatos disponíveis
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 1
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 2
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 3
Indice:
CARACTERÍSTICAS GERAIS ............................................................................................................................................. 6
Excel ........................................................................................................................................................................................ 6
E800 ........................................................................................................................................................................................ 6
Características de configurações de acionamento ................................................................................................................. 7
O CONTROLE VVVF ..................................................................................................................................................... 8
Tipos de sistemas de controle do inversor .............................................................................................................................. 8
Malha Aberta: ................................................................................................................................................. 8
Malha Fechada: .............................................................................................................................................. 8
PAINEL DE COMANDO EXCEL ........................................................................................................................................... 9
Placa CPU .............................................................................................................................................................................. 10
IHM ....................................................................................................................................................................................... 11
Placa I/O ............................................................................................................................................................................... 12
Led’s de Entrada ................................................................................................................................................................... 13
Led’s de Saída ....................................................................................................................................................................... 14
Led’s internos ........................................................................................................................................................................ 15
Proteção ................................................................................................................................................................................ 16
Função dos botões ................................................................................................................................................................ 16
Transformadores ................................................................................................................................................................... 17
Circuito Seletor ...................................................................................................................................................................... 18
Módulos de Operação ........................................................................................................................................................... 20
Diagrama Genérico ............................................................................................................................................................... 21
Circuito de Segurança Geral e de Portas Excel VVVF ............................................................................................................ 22
Circuito Manobra .................................................................................................................................................................. 23
CIRCUITOS EXCLUSIVOS DA CPU ................................................................................................................................... 24
Chamadas ............................................................................................................................................................................. 24
Saída Analógica: ................................................................................................................................................................... 24
IPD ......................................................................................................................................................................................... 25
Comunicação ........................................................................................................................................................................ 25
PARÂMETROS DO EXCEL VVVF ...................................................................................................................................... 26
AXX – Parâmetros de Monitoria ....................................................................................................................... 26
BXX – Parâmetros de comando ....................................................................................................................... 27
CXX – Parâmetros de configuração .................................................................................................................. 28
d00 - ARQUIVOS DAS ULTIMAS 64 FALHAS ..................................................................................................... 30
d01 - GRAVAÇÃO DOS PARÂMETROS.............................................................................................................. 30
EXX – Ajuste do display .................................................................................................................................. 31
HXX – Ajusta a Data e Hora do display na cabina ............................................................................................... 31
EX800 VVVF JV0 193 / JV0 270 ............................................................................................................................... 32
Led’s de Entrada ................................................................................................................................................................... 33
Led´s de Sergurança .............................................................................................................................................................. 33
Led´s dos Sensores de movimento e Zona de porta .............................................................................................................. 34
Led’s de Saída ....................................................................................................................................................................... 34
Tabela de Fusíveis do Comando Ex 800 ................................................................................................................................ 34
Circuito de Segurança Geral e de Portas Ex800 VVVF ........................................................................................................... 35
PARÂMETROS DE PROGRAMAÇÃO – EX800 VVVF ............................................................................................................... 36
AXX – Parâmetros de Monitoria ....................................................................................................................... 36
BXX – Parâmetros de comando ....................................................................................................................... 37
C – Parâmetros de configuração ..................................................................................................................... 38
d00 - ARQUIVOS DAS ULTIMAS 64 FALHAS ..................................................................................................... 40
d01 - GRAVAÇÃO DOS PARÂMETROS.............................................................................................................. 40
EXX – Ajuste do display .................................................................................................................................. 40
FALHAS DO EXCEL VVVF E EX800 VVVF ......................................................................................................................... 41
TABELAS ................................................................................................................................................................ 50
Tabelas de Limites do Excel e EX800 ............................................................................................................... 50
Tabela de Sinalização Excel VVVF .................................................................................................................... 50
INVERSOR YASKAWA L7 ............................................................................................................................................ 51
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 4
PARÂMETROS .......................................................................................................................................................... 51
CÓDIGO DE FALHAS DO INVERSOR .................................................................................................................................. 61
Falhas exclusivas do L7 ‐ 1 .................................................................................................................................................... 69
Falhas exclusivas do L7 ‐ 2 .................................................................................................................................................... 70
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 5
Excel VVVF e Ex800VVVF
EXBB VVVF
EX = Comando Excel
BB = Seletivo na Subida e Descida ( dois botões)
EXBD
BD = Seletivo apenas na descida
VVVF
VV = Variação de voltagem
VF = Variação de Frequência
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 6
Características Gerais
Excel
Nº máx. de
Estratégia Comando Atlas Cod Obs.:
paradas
Simplex /
EXBD Não 28 -
Duplex
Chamadas
diferenciadas
somente para
EXBD Simplex Sim 20
andares
acima do
térreo
Simplex /
EXBB Não 20 -
Duplex
Simplex / Utiliza painel
EXBD SIM 44
Duplex de despacho
Utiliza painel
EXBB Multicarro Não 44
de despacho
Velocidade: 45 a 150 m/m ou 0,75 a 2,50 m/s
Tensão: 220V / 380V / 440V
Máquinas: CE120 / CE190 / CE250 / CE357 / W140 / W163
E800
Nº máx. de
Estratégia Comando Atlas Cod Obs.:
paradas
Simplex / Apenas Obras
EXBD Não 24
Duplex Especiais
Simplex /
EXBD Não 21 Normal
Duplex
Velocidade: 45 a 90 m/m ou 0,75 a 1,50 m/s
Tensão: 220V / 380V / 440V
Máquinas: CE120 / CE190
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 7
Características de configurações de acionamento
Excel Ex800
1 De 45 à 75 m/m ou 0,75 à 1,25m/s 1 De 45 à 75 m/m ou 0,75 à 1,25m/s
Configuração básica (Malha Aberta) Configuração básica (Malha Aberta)
Placa buffer (JV0228) ou encoder na máquina Placa buffer (JV0228) ou encoder na máquina
Sem roda dentada no limitador Sem roda dentada no limitador
Sem RNA Sem RNA
Sem placa de segurança Sem placa de segurança
Máquinas CE120 / CE190 / W140 Máquinas CE120 / CE190
2 De 45 à 105 m/m ou 0,75 à 1,75 m/s
Configuração Avançada (Malha Fechada)
Placa Buffer (JV0132) ou encoder no limitador
Encoder na máquina
Com RNA
Com placa sensor de velocidade de nivelamento
(JV0259) monitora somente o nivelamento
Máquinas: CE190 / CE250 / CE357 / W140 / W163
3 De 120 à 150m/m ou 2,00 à 2,50 m/s
Configuração Avançada (Malha Fechada Vector
Control)
Placa Buffer (JV0132) ou encoder no limitador
Encoder na máquina
Com RNA
Com placa de segurança completa (JV0249)
Máquinas: CE190 / CE250 / CE357 / W163
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 8
O controle VVVF
Esse tipo de controle é conhecido como VVVF (Variable Voltage and Variable Frequency – Variação de
Voltagem e Variação de Freqüência).
Tipos de sistemas de controle do inversor
Malha Aberta:
Velocidade de 0,75 a 1,25 m/s.
Esta é uma característica de funcionamento do inversor, sem realimentação do motor.
Os pulsos gerados pela Buffer ou encoder do motor ou máquina são destinados ao Comando
Malha Fechada:
Velocidades 0,75 e 2,5 m/s.
Esta é uma característica de funcionamento do inversor, com realimentação do motor.
Os pulsos gerados pela Buffer ou encoder do limitador são destinados ao Comando
Os pulsos gerados pela Encoder do motor são destinados ao Inversor
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 9
Painel de Comando Excel
1
Comando (CPU e I/O)
2 Painel de Serviço
3 Disjuntor DJ1
4 Contatores de porta de cabina (PA e PF)
5 Contatores de manobra ( S, D e RUN)
6 Terminais de comando
7 Drive ou Inversor
8 Painel de conectores (Hylock)
9 Contator de manobra (A)
10 Terminais de potência
11 Fusíveis de potencia
12 Transformador 1 - CPU
13 Transformador 2 – CX/CY (115Vac) e 20UR
14 Placa de controle do freio
15 Filtro da CPU
16 Placa do sensor de nivelamento
17 Conjunto resistor de frenagem
18 Fonte auxiliar de IPD
19 Filtro de RF
20 Reator
21 Unidade de Frenagem
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 10
Placa CPU
Responsável pelo controle e processamento de todas as informações
22 Conector CN22 do circuito de chamada
23 Conector CN23 do circuito do display
24 Conector CN24 de comunicação paralela ou rede
25 Conector CN25 da referência de velocidade para o inversor
26 Conector CN26 de comunicação serial
27 IHM – Interface Homem Máquina
28 Processador
29 – Memória EPROM – Gravado pelo fabricante, onde estão armazenados os dados
de acionamento e comunicação
30 – Memória RAM
31 – Memória EEPROM – Configurado e gravado no local pelo técnico, onde estão
armazenados os dados das características do edifício
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 11
IHM
Proporciona a comunicação entre o técnico e o comando através das três teclas e três displays de sete
segmentos.
A teclas possibilitam selecionar e alterar as funções indicadas nos displays
Display
C Centena
D Dezena
U Unidade
Tecla
E Entra e Sai do parâmetro
S Sobe
D Desce
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 12
Placa I/O
Entrada – Sinalizado por led’s
32
Saída
33
Confirmação de segurança
34
Reles de segurança
35
Fontes
36
Monitoramento da rede
37
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 13
Led’s de Entrada
CONDIÇAO DO LED
LED OCORRÊNCIA
OK
PC Porta de cabina e emergência fechadas. ACESO
PP/RMC Porta de pavimento e contato de barra de proteção fechados ACESO
SEGG Segurança geral em continuidade. ACESO
CT Contato de trinco fechado. ACESO
SEGP Segurança de porta em continuidade ACESO
AUT Em automático. ACESO
SN Acionado nivelamento. APAGADO
DAF Em operação com gerador de emergência APAGADO
N2 Relê de nivelamento APAGADO
CX Linha CX sem fuga de massa ou sem indução ACESO
CY Linha CY sem fuga de massa ou sem indução. ACESO
OEI2 Em operação de emergência contra incêndio (FASE 2). APAGADO
WN Peso não ultrapassou a limite máximo (110%). APAGADO
LS Limite de parada na subida não acionado. ACESO
LD Limite de parada na descida não acionado. APAGADO
TRFO Com atlas SAFE II contator “AL” ligado. APAGADO
A Contator A acionado. ACESO
AE Contator RUN acionado. ACESO
S Contator S acionado. ACESO
D Contator D acionado. ACESO
ASC Quando em ascensorista. APAGADO
FC Quando não obstruído o facho de proteção. ACESO
ID Posição de nivelamento na descida não atingida. ACESO
IS Posição de nivelamento na subida não atingida. ACESO
WH Peso não ultrapassou a limite de 80% da carga. ACESO
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 14
LPA Limite de porta aberta não acionado. ACESO
RMT Rampa magnética desligada (avançada). APAGADO
PO Botão na cabina para abrir porta não acionado. ACESO
LAS Limite de alta na subida não acionado. ACESO
LAD Limite de alta na descida não acionado. ACESO
COD Em operação de manutenção (ATLAS CODE). APAGADO
LS4 1° corte de alta na subida não acionado. ACESO
LD4 1° corte de alta na descida não acionado. ACESO
B6 Contato do freio fechado. APAGADO
OEI1 Em operação de emergência contra incêndio (FASE 1). APAGADO
RES_ _ Entradas reservas. APAGADO
SP0_ _ Entradas reservas. APAGADO
Led’s de Saída
LED DESCRIÇÃO
Acionamento do contator RUN
RUN
(Sinalizalçao para o inversor de inicio de movimento)
TD Não utilizado neste comando
B Não utilizado neste comando
Acionamento do contator D
D
(Manobra de Subida)
Acionamento do contator S
S
(Manobra de Descida)
Acionamento do contator A
A
(Inicio da manobra, energização do motor)
NIV Liberação para nivelamento
RS5 Não utilizado neste comando
VM Acionamento da Ventilação forçada do motor
RA1 Não utilizado neste comando
CB Não utilizado neste comando
PA Acionamento do contator de abrir porta
PF Acionamento do contator de fechar porta
ACOD Acionamento do rele do Atlas Cod, se houver
RMT Acionamento da Rampa Magnética, se houver
RA2 Não utilizado neste comando
RB2 Não utilizado neste comando
VC1 Acionamento do contator
VC2 Acionamento do contator
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 15
Led’s internos
LED Descrição
LD1 Indicação da fonte -12V.
LD2 Indicação da fonte +12V.
LD3 Indicação da fonte +5V.
LD4 Acionamento dos reles AUT1 e AUT2.
LD5 Indicação da fonte +20V.
LD25 Circuito de freio (bobina desenergizada).
LD26 Acionamento dos reles SEG1 e SEG2.
LD27 Sensor de corrente do circuito de segurança de porta.
LD28 Circuito do termistor (excesso de temperatura no motor).
LD29 Acionamento dos reles N1 e N2.
LD30 Acionamento do rele MP.
LD75 Acionado NIVAUX (relê auxiliar de nivelamento).
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 16
Proteção
Fusíveis:
Função dos fusiveis
38 FUS 1 6A 220Vac Circuito de alimentação dos indicadores de
pavimento.
39 FUS 2 3A 220Vac Com BRE, IPM, IGPS ou IGPD na cabina.
Fonte de 20UR (Circuitos de chamadas,
40 FUS 3 4A 18Vac IPD e seta bargraph.
Sensor da roda dentada do limitador).
41 FUS 4 4A 9Vac Fonte de +5V (Circuitos integrados).
42 FUS 5 1A 16Vac Fonte de +/-12V e +/-18V (Circuitos de
43 FUS 6 1A 16Vac comunicação/Relê MP)
44 FUS 7 5A 115Vac CX
Sensores de corrente (Circuito de
45 FUS 8 0,5 A 115Vac
segurança).
FUS
46 3A 220Vac Circuito do motor do operador de porta.
9/10/11
Circuito de Luz de cabina e tomada no
47 FUS 12/13 10 A 220Vac
painel, cabina e poço.
Função dos botões
48 BLC Segurança – Desbloqueio dos limites de fim de curso LD1 e LS1
49 AUT/MAN Coloca e retira o elevador em serviço de automático ou manual
50 SOBE / DESCE Manobra o elevador quando o comando estiver em manual
51 PA / PF Abre e fecha a porta de cabina quando o comando estiver em manual
52 PORTA Liga e desliga a alimentação do operador de portas da cabina
53 LUZ Liga ou desliga a iluminação da cabina
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 17
Transformadores
Trafo Enrolamento Terminal Tensão AC(V) Proteção Função
F1 Disjuntor
Primário 220 / 380 / 440
F2 DJ1
TFX Fusível Alimenta as linhas CX /
115
CX FUS. 7 – 5A CY e SC
Alimenta fonte de 20UR
T1 TF6 Fusível – Circuitos: de chamada,
19
AC7 FUS. 3 – 4A Buffers, Encoder e
Secundário
Indicadores de posição)
Placa de segurança
JV0249
E, F, G, H, I 14,5
Placa sensor de
velocidade JV0259
F1 Disjuntor
Primário 220 / 380 / 440
F2 DJ1
TF1 Fusível Alimenta fonte de 5Vcc
10
AC2 FUS. 4 – 4A (CPU)
T2
Secundário Alimenta as fontes de
TF3 Fusível
±18Vcc (MP/NIV AUX)
TF4 16,5 FUS. 5 / FUS 6
± 12Vcc (circuito de
AC5 1A
comunicação)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 18
Circuito Seletor
Buffer na máquina (JV0228)
Buffer no limitador (JV0132)
Encoder no limitador
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 19
Encoder no motor para o Inversor
Sensor de zona de porta IS e ID sem RNA
Sensor de zona de porta IS e ID com RNA
Módulo interface IS e ID com RNA
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 20
Módulos de Operação
Módulo de controle do freio
Placa Interface do Daffe
Placa atenuadora da Rede
Módulo sensor de velocidade de nivelamento
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 21
Diagrama Genérico
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 22
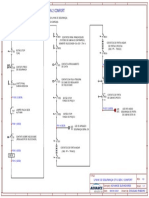
Circuito de Segurança Geral e de Portas Excel VVVF
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 23
Circuito Manobra
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 24
Circuitos Exclusivos da CPU
Chamadas
As linhas de chamadas são matriciais, e são divididas em:
08 (oito) linhas de varredura (VX): (V00, V01, V02,..., V07).
08 (oito) linhas de retorno (BT): (BT0, BT1,..., BT7) e.
08 (oito) linhas de sinalização ou iluminação de botão (LD): (LD0,..., LD7).
Ex.: Mapa de chamadas na configuração EXBB
Saída Analógica:
Referência referencia de velocidade enviada ao inversor, quando o sistema é em malha aberta e em
malha fechada com velocidade menor que 120 mpm.
Possue tensão variando que varia 0 e 10Vdc.
Sendo: 0V = 0Hz
10V = Frequencias programadas em E1-04 e E1-06 no inversor
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 25
IPD
Indicador posição: responsável pela sinalização de posição da cabina.
Normalmente os indicadores de posição do Excel utilizam comunicação serial, podendo também ser
encontrados em situações especiais os indicadores paralelos.
Comunicação
Existem dois modos de comunicação na CPU, Serial e Rede (paralela).
Serial – Duplex Rede - Multiplex
Sistema Multiplex
A comunicação é paralela, utiliza Rede Archnet e é necessário painel de despacho ADS EX ( de 3 a 4 carros)
ou ADS AS (de 3 a 16 carros)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 26
Parâmetros do Excel VVVF
AXX – Parâmetros de Monitoria
Indicação de estado do elevador
A00 – Indicação do IPD
Mostra o pavimento/andar em que a cabina se encontra, é a mesma indicação dos display´s de
pavimento/andar ou cabina.
A01 – Indicação do pavimento
Mostra o numero da parada em que a cabina se encontra, essa indicação inicializa com 000 (zero) que
corresponde à primeira parada, extremo inferior.
A02 – Velocidade atual do elevador.
Velocidade em que o elevador esta se movimentando em metros/seg., medida pelo encoder da máquina
(sistema de malha aberta)
A03 – Velocidade de referência
Padrão de velocidade que o comando envia ao drive.
A04 – Tensão da rede
Medida da soma das tensões da rede
A05 – Freqüência da rede
Medida da freqüência da rede.
A06 – Precisão de nivelamento na parada
Mede o desnível da cabina na parada em milímetros tendo como off-set o valor 100
099 – Faltou 1mm para o nivelamento da cabina.
100 – Cabina parou nivelada
101 – Passou 1mm do nivelamento
A08 – Posição em números de pulsos dividido por 10
Posição absoluta da cabina pela contagem de números de pulsos, desde o 000 (na primeira parada) até a
posição atual, o valor é dividido por 10.
A09 – Distancia absoluta (em pulsos) que faltam para completar a viagem
Quantidade de pulsos que faltam para completar a viagem.
A10 – Velocidade nominal do elevador (m/min)
Velocidade calculada através da programação dos parâmetros C31, C32, C33, C34 e C39
A11 – Hodômetro (X1000)
Quantidade de partidas realizadas pela cabina dividido por 1000.
A12 – Versão do software (Axx)
A13 – Número do software (xxx)
A14 – Sub. do software (atualização)
Ex. A A12 A13 . A14
A15 – Varia dependendo do valor definido no parâmetro B02
B02(000) – distância do limite LD3 (limite de corte de alta na descida)
B02(001) – distância do limite LS3 (limite de corte de alta na subida)
B02(004) – contagem dos sinais coincidentes de IS e ID
B02(005) – tempo de viagem entre pavimentos adjacentes.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 27
BXX – Parâmetros de comando
Comando de algumas funções do elevador
B00 – Simula chamadas de cabina.
Parâmetro utilizado para realizar chamadas de cabina, o valor utilizado corresponde ao numero da parada
(A01)
B01 – Aprendizagem automática
Ao definir B01 = 001 e passar a chave manual/aut. de manual para automático o carro irá realizar uma
viagem de aprendizado da caixa
PROCEDIMENTO:
Deve ser colocado o valor "001". Se estiver operando em manual passe a chave "AUT/MAN" para automático,
caso esteja em automático passe a chave para manual e retorne para automático.
OBS: A cabina deverá estar no extremo inferior. Subirá até o extremo superior realizando o aprendizado das
posições de nivelamento das paradas, tendo como referencia as placas indicadoras de zona de porta, o
sensor óptico e o encoder da máquina/motor. Todo o procedimento de aprendizado é feito em velocidade
reduzida.
B02 – Define qual será a informação mostrada no parâmetro A15
000 – distância do limite LD3 (em cm)
001 – distância do limite LS3 (em cm)
004 – contador de marker
005 – tempo de viagem (usado para atualizar o parâmetro C19)
B03 – Chamadas aleatórias
Ao definir B03 = 001 o carro irá realizar viagens de aleatória por viagens de cabina, para cancelar basta
retornar o valor de B03 = 000.
B04 – Alinha o IPD pelo térreo
Utilizado para correção do indicador de posição tendo por referencia o pavimento principal, pavimentos
inferiores ao principal ficarão negativos o principal “0” (zero) e demais positivos.
B07 – Altera o hodômetro (X1000)
Corrige a contagem informada em A11, podendo ser zerada.
B08 – Simula chamadas de pavimento de descida
Parâmetro utilizado para realizar chamadas de pavimento de descida, o valor utilizado corresponde ao numero
da parada (A01)
B09 – Simula chamadas de pavimento de subida
Parâmetro utilizado para realizar chamadas de pavimento de subida, o valor utilizado corresponde ao numero
da parada (A01)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 28
CXX – Parâmetros de configuração
São configuradas as condições de funcionamento do elevador
C00 – Distancia do LD3 e LS3 (cm)
Distância de posicionamento dos limites de corte de alta velocidade, instalados na caixa de corrida, também
serve de referência para distância mínima na desaceleração em todos os pavimentos.
Vide TABELA DE LIMITES
C05 – Tempo de detecção de LPA
Tempo que o comando aguarda para receber o sinal de LPA (contato do limite de porta aberta) após o
comando de abrir a porta. Esse tempo também é utilizado para a detecção do sinal de PC (contato porta de
cabina fechada)
Faixa de valores 005 a 030 valor usual = 016
C09 – Configuração da porta de cabina.
000 – Cabina estaciona de porta fechada em todos os pavimentos
001 – Cabina estaciona de porta aberta somente no andar de estacionamento e nos demais de portas
fechadas
002 – Cabina estaciona de porta aberta em todos os pavimentos.
003 – Cabina não abre a porta em nenhum pavimento, programação utilizado apenas no período de ajuste do
comando.
C10 – Configuração do andar inferior
Define o pavimento inferior no qual o comando começará a atender as chamadas de cabina e/ou pavimento.
C11 – Configuração do andar superior
Define o pavimento superior no qual o comando finalizará o atendimento das chamadas de cabina e/ou
pavimento.
C12 – Configuração do andar principal
Define o pavimento principal ou térreo.
C13 – Configuração do andar de estacionamento
Define o pavimento onde a cabina irá estacionar, se for habilitado o estacionamento em C37. Pode ser
programado qualquer pavimento.
C14 – Configuração da linha de chamada.
Define a configuração das linhas de chamadas de pavimento e cabina, conforme o numero de paradas.
000 – até 20 paradas
001 – de 21 a 24 paradas
C15 – Tempo de porta aberta para chamadas de cabina (tempo em 0,1 seg.)
Tempo que o comando vai aguardar com a porta aberta ao atender uma chamada de cabina antes de fechá-
la para atender outra chamada.
C16 – Tempo de porta aberta para chamadas de pavimento (tempo em 0,1 seg.)
Tempo que o comando vai aguardar com a porta aberta ao atender uma chamada de pavimento antes de
fechá-la para atender outra chamada.
C17 – Tempo de porta aberta para chamadas do andar térreo (tempo em 0,1 seg.)
Tempo que o comando vai aguardar com a porta aberta sempre que estive no pavimento principal.
C19 – Tempo de detecção de NAST (em segundos)
Tempo de viagem entre andares adjacentes, leitura de A15, quando definido 05 em B02.
tempo de viagem = parâmetro {A15 @(B02=05)}/10 valor mínimo 3
C20 – Aceleração e Desaceleração máximas (x 0,1 m/s ) 2
Limite máximo de aceleração e desaceleração permitido para a viagem, o valor utilizado pelo comando
dependerá das condições de carga e distancia a ser percorrida, porém nunca superior ao programado.
Faixa de valores de 001 a 015 valores recomendáveis = 005
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 29
C21 – Jerk máximo (0,1 m/s ) 3
Limite máximo para variação da aceleração e desaceleração, o valor utilizado pelo comando dependerá das
condições de carga e distancia a ser percorrida, porém nunca superior ao programado.
Faixa de valores de 001 a 040 valores recomendáveis = 005
Obs.: É recomendável, por questão de conforto que C20 ≤ C21 ≤ 2C20
C22 – Tempo de espera do freio para liberar o padrão (x 20 ms)
Após energizar o freio, o comando irá aguardar esse tempo liberar o padrão, no sistema de malha aberta, o
drive injetará corrente contínua para manter o motor freado eletricamente.
Faixa de valores de 000 a 100 valores recomendáveis = 004
C24 – Velocidade manual (m/min)
Velocidade máxima permitida para movimentação da cabina quando em manutenção / inspeção
Faixa de valores de 005 a 045 valor recomendável = 020
C26 – Velocidade inicial na partida (%)
Velocidade mínima que o comando mandará o drive movimentar a cabina no inicio da viagem. O valor
programado pode ocasionar uma partida brusca se for muito alto, ou não permitir a partida se for muito baixo.
Faixa de valores de 000 a 200 valor recomendável = 000
C27 – Posição do nivelamento para acionamento do freio (máquina sem encoder)
Distancia (em pulsos x 10) do nivelamento para que o comando mande fechar o freio, dependendo do ajuste
de abertura do freio, poderá ocorrer desnivelamento.
Faixa de valores de 000 a 500 valor recomendável = 000
C29 – Angulo de disparo do freio durante o nivelamento (%)
Durante o nivelamento pode-se controlar o nível de tensão de alimentação do freio.
Faixa de valores de 005 a 100 valor recomendável = 060
C32 – Efeito da tração
001 – 1:1 tração simples
002 – 2:1 tração dupla
C33 – Diâmetro da polia (mm)
Vide placa de especificação na máquina
C34 – Rotação da polia de tração
Vide placa de especificação na máquina
C36 – Número do painel
Para identificação do carro no sistema
C37 – Habilitação de estacionamento
000 – não habilita o retorno automático da cabina ao pavimento de estacionamento C13.
001 – habilita o retorno automático da cabina ao pavimento de estacionamento C13
C38 – Número de dentes da roda dentada
Valor fixo = 032
C39 – Rotação síncrona do motor
Vide TABELA DE CONFIGURAÇÃO DE MÁQUINA
C40 – Grupo da placa de atenuação
000 – 220V
001 – 380V
002 – 440V
C41 – Tensão nominal da rede
Seleção da tensão disponível
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 30
C43 – Seleção de atendimento das chamadas de pavimento
000 – Atende todos os pavimentos
001 – Atende somente os andares pares, principal, estacionamento e inferiores ao principal.
002 – Atende somente os andares impares, principal, estacionamento e inferiores ao principal.
003 – Atende somente chamadas de cabina, utilizado em ajustes.
C44 – Cancelamento de chamada falsa
Se a cabina parar três vezes por chamada de cabina e não for detectado o sinal de PP/RMC atuado, o
comando cancela todas as chamadas restantes.
000 – Cancela
001 – Não cancela
*C45 – Ganho integral de velocidade na aceleração (oscilação lenta)
Atenuação das oscilações lentas que ocorrerem durante a aceleração
de 1 a 20 usual = 004
*C46 – Ganho proporcional de velocidade na aceleração
Atenuação das oscilações rápidas que ocorrerem no inicio da aceleração
de 1 a 20 usual = 008
*C47 – Ganho integral de velocidade na desaceleração
Atenuação das oscilações lentas que ocorrerem durante a desaceleração
de 1 a 20 usual = 005
*C48 – Ganho proporcional de velocidade na desaceleração
Atenuação das oscilações rápidas que ocorrerem no final da desaceleração
de 1 a 20 usual = 010
*Obs.: Os parâmetros C45, C46, C47 e C48, só deverão ser alterados no caso de ocorrer oscilações, no momento
da aceleração e/ou desaceleração
C49 – Escorregamento do motor
Vide TABELA DE CONFIGURAÇÃO DO MOTOR (E2 – 02 / pg. 01 / seção 11)
C50 – Senha para liberação de modificação de parâmetros
031
d00 - ARQUIVOS DAS ULTIMAS 64 FALHAS
Estão registradas as ultimas 64 falhas juntamente com seus respectivos complementos.
PROCEDIMENTO:
1. Quando em "d00", aperte o botão “ENTER” (direita).
2. Aparecerá a ultima falha, ao pressionar o botão “DESCE” (esquerda) aparecerá o complemento da ultima falha.
3. Pressionar novamente o “DESCE” aparecerá a penúltima falha, e após o complemento, e assim na seqüência
(falha ⇒ complemento) até a 64ª falha. A cada entrada de nova falha a pilha é empurrada para baixo.
4. Para sair é só pressionar a tecla “ENTER”
d01 - GRAVAÇÃO DOS PARÂMETROS
000 - não habilita a gravação
001 - habilita a gravação dos parâmetros "Cxx" e "Exx"
002 - reset dos arquivo de falhas em "d00"
É aconselhável manter esse parâmetro sempre em "000" para evitar a gravação de dados indesejáveis.
PROCEDIMENTO:
Quando em "d01", aperte o ENTER, insira o valor "001" e aperte o ENTER, aguarde 10 seg., aperte o ENTER, insira
o valor "000" e aperte o ENTER.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 31
EXX – Ajuste do display
Nos parâmetros de E00 à E44 são inseridos os caracteres que deverão ser mostrados nos IPD’s.
Sendo:
E00 – Primeira parada
E01 – Segunda parada...
HXX – Ajusta a Data e Hora do display na cabina
H00 ANO 000 ~099 Ajusta o ano no display
H01 MÊS 001 ~ 012 Ajusta o mês
H02 DIA DO MÊS 001 ~ 031 Ajusta o dia do mês
H03 DIA DA SEMANA 001 ~ 007 Ajusta o dia da semana (domingo, segunda,...)
H04 HORA 000 ~ 023 Ajuste da hora
H05 MINUTO 000 ~ 59 Ajusta o minuto
H06 Envia 002 Envia os ajustes para o display da cabina
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 32
EX800 VVVF JV0 193 / JV0 270
54 Led’s de Entrada
55 Led’s de Saída
56 Botões de Manobra
57 Reles de Segurança
58 Conectores Hylock
59 Led’s de Segurança
60 Comunicação Serial
61 Sensores de Movimento e Zona de Porta
62 IHM
63 Fontes
64 – Processamento Detalhe das memórias do EX800
64A – Memória EPROM – Gravado pelo fabricante, onde estão
armazenados os dados de acionamento e comunicação
64B – Memória Batery RAM – Configurado e gravado no local pelo
técnico, onde estão armazenados os dados das
características do edifício
Esta memória substitui as memórias RAM e EEPROM
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 33
Led’s de Entrada
CONDIÇAO DO LED
LED OCORRÊNCIA
Acionado / Ativo
A Contator A ACESO
S Contator S ACESO
D Contator D ACESO
SEG1/2 Segurança Geral, Porta de Cabina e Barra Eletrônica OK ACESO
SEG1/2 Contato de Trinco (porta de pavimento) OK ACESO
LPA Limite de porta aberta não acionado. ACESO
OEI-1 Em operação de emergência contra incêndio (FASE 1). ACESO
PF Botão Fecha porta acionado ACESO
PO Botão abre porta não acionado ACESO
RB1 Sinalização de retorno de Inversor pronto ACESO
CX Não tiver massa na linha CX. ACESO
CY Não tiver massa na linha CY. ACESO
BRF Freio Acionado ACESO
Led´s de Sergurança
CONDIÇAO DO LED
LED OCORRÊNCIA
Acionado / Ativo
AUT1/2 Operação em automático APAGADO
PC Porta de cabina fechada ACESO
SEGG Circuito da linha de segurança OK ACESO
CT Contato de trinco fechado ACESO
LD Limite de parada inferior não acionado ACESO
LAD Limite de redução inferior não acionado ACESO
Porta de pavimento fechada ou Barra ACESO
PP/RMC
Eletrônica liberada
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 34
Led´s dos Sensores de movimento e Zona de porta
LED CONDIÇAO DA CABINA
OCORRÊNCIA
PARADA MOVIMENTO
INVA
Indicação de leitura do Buffer ACESO OU APAGADO PISCANDO
INVB
IND
Indicação de Zona de Porta APAGADO ACESO
INS
Led’s de Saída
CONDIÇAO DO LED
LED OCORRÊNCIA
Acionado / Ativo
VC Ventilador da cabina ACESO
PF Fechar porta de cabina ACESO
PA Abrir porta de cabina ACESO
RA1 Injeção DC pelo inversor na partida e parada ACESO
B Liga o Inversor ACESO
A Liga o contator A ACESO
D Liga o contator D ACESO
S Liga o contator S ACESO
Tabela de Fusíveis do Comando Ex 800
Fusíveis A V Linha Função
15F Circuito de chamada
FUS 1 4A 20V Sensor de velocidade da máquina
20UR
Setas de pavimento
F2 2A 5V CPU Circuito de processamento
F3 Circuito interno de controle
0,5 A 12V 12F
F4 Padrão de velocidade
Circuito de segurança geral
FUS 5 3A 115V CX
Acionamento de contatoras
F6 3A 9V 9UR Circuito de Display
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 35
Circuito de Segurança Geral e de Portas Ex800 VVVF
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 36
Parâmetros de Programação – EX800 VVVF
AXX – Parâmetros de Monitoria
Indicação de estado do elevador
A00 – Indicação do IPD
Mostra o pavimento/andar em que a cabina se encontra, é a mesma indicação dos display´s de
pavimento/andar ou cabina.
A01 – Indicação do pavimento
Mostra o numero da parada em que a cabina se encontra, essa indicação inicializa com 000 (zero) que
corresponde à primeira parada, extremo inferior.
A02 – Velocidade atual do elevador.
Velocidade em que o elevador esta se movimentando em metros/seg., medida pelo encoder da máquina
(sistema de malha aberta)
A03 – Velocidade de referência
Padrão de velocidade que o comando envia ao drive.
A04 – Tensão da rede
Medida da soma das tensões da rede
A05 – Frequência da rede
Medida da frequência da rede.
A06 – Precisão de nivelamento na parada
Mede o desnível da cabina na parada em milímetros tendo como off-set o valor 100
099 – Faltou 1mm para o nivelamento da cabina.
100 – Cabina parou nivelada
101 – Passou 1mm do nivelamento
A08 – Posição em números de pulsos dividido por 10
Posição absoluta da cabina pela contagem de números de pulsos, desde o 000 (na primeira parada) até a
posição atual, o valor é dividido por 10.
A09 – Distancia absoluta (em pulsos) que faltam para completar a viagem
Quantidade de pulsos que faltam para completar a viagem.
A10 – Velocidade nominal do elevador (m/min)
Velocidade calculada através da programação dos parâmetros C31, C32, C33, C34 e C39
A11 – Hodômetro (X1000)
Quantidade de partidas realizadas pela cabina dividido por 1000.
A12 – Versão do software (Axx)
A13 – Número do software (xxx)
A14 – Sub. do software (atualização)
Ex. A A12 A13 . A14
A15 – Varia dependendo do valor definido no parâmetro B02
B02(000) – distância do limite LD3 (limite de corte de alta na descida)
B02(001) – distância do limite LS3 (limite de corte de alta na subida)
B02(004) – contagem dos sinais coincidentes de IS e ID
B02(005) – tempo de viagem entre pavimentos adjacentes.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 37
BXX – Parâmetros de comando
B00 – Simula chamadas de cabina.
Parâmetro utilizado para realizar chamadas de cabina, o valor utilizado corresponde ao numero da parada
(A01)
B01 – Aprendizagem automática
Ao definir B01 = 001 e passar a chave manual/aut. de manual para automático o carro irá realizar uma
viagem de aprendizado da caixa
PROCEDIMENTO:
Deve ser colocado o valor "001". Se estiver operando em manual passe a chave "AUT/MAN" para automático,
caso esteja em automático passe a chave para manual e retorne para automático.
OBS: A cabina deverá estar no extremo inferior. Subirá até o extremo superior realizando o aprendizado das
posições de nivelamento das paradas, tendo como referencia as placas indicadoras de zona de porta, o
sensor óptico e o encoder da máquina/motor. Todo o procedimento de aprendizado é feito em velocidade
reduzida.
B02 – Define qual será a informação mostrada no parâmetro A15
000 – distância do limite LD3 (em cm)
001 – distância do limite LS3 (em cm)
004 – contador de marker
005 – tempo de viagem (usado para atualizar o parâmetro C19)
B03 – Chamadas aleatórias
Ao definir B03 = 001 o carro irá realizar viagens de aleatória por viagens de cabina, para cancelar basta
retornar o valor de B03 = 000.
B04 – Alinha o IPD pelo térreo
Utilizado para correção do indicador de posição tendo por referencia o pavimento principal, pavimentos
inferiores ao principal ficarão negativos o principal “0” (zero) e demais positivos.
B07 – Altera o hodômetro (X1000)
Corrige a contagem informada em A11, podendo ser zerada.
B08 – Simula chamadas de pavimento de descida
Parâmetro utilizado para realizar chamadas de pavimento de descida, o valor utilizado corresponde ao numero
da parada (A01)
B09 – Simula chamadas de pavimento de subida
Parâmetro utilizado para realizar chamadas de pavimento de subida, o valor utilizado corresponde ao numero
da parada (A01)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 38
C – Parâmetros de configuração
C00 – Distancia do LD3 e LS3 (cm) (pg. 01 / seção 07)
Distância de posicionamento dos limites de corte de alta velocidade, instalados na caixa de corrida, também
serve de referência para distância mínima na desaceleração em todos os pavimentos.
Vide TABELA DE LIMITES
C05 – Tempo de detecção de LPA
Tempo que o comando aguarda para receber o sinal de LPA (contato do limite de porta aberta) após o
comando de abrir a porta. Esse tempo também é utilizado para a detecção do sinal de PC (contato porta de
cabina fechada)
Faixa de valores 005 a 030 valor usual = 016
C09 – Configuração da porta de cabina.
000 – Cabina estaciona de porta fechada em todos os pavimentos
001 – Cabina estaciona de porta aberta somente no andar de estacionamento e nos demais de portas
fechadas
002 – Cabina estaciona de porta aberta em todos os pavimentos.
003 – Cabina não abre a porta em nenhum pavimento, programação utilizado apenas no período de ajuste do
comando.
C10 – Configuração do andar inferior
Define o pavimento inferior no qual o comando começará a atender as chamadas de cabina e/ou pavimento.
C11 – Configuração do andar superior
Define o pavimento superior no qual o comando finalizará o atendimento das chamadas de cabina e/ou
pavimento.
C12 – Configuração do andar principal
Define o pavimento principal ou térreo.
C13 – Configuração do andar de estacionamento
Define o pavimento onde a cabina irá estacionar, se for habilitado o estacionamento em C37. Pode ser
programado qualquer pavimento.
C14 – Configuração da linha de chamada.
Define a configuração das linhas de chamadas de pavimento e cabina, conforme o numero de paradas.
000 – até 20 paradas
001 – de 21 a 24 paradas
C15 – Tempo de porta aberta para chamadas de cabina (tempo em 0,1 seg.)
Tempo que vai aguardar com a porta aberta ao atender uma chamada de cabina
C16 – Tempo de porta aberta para chamadas de pavimento (tempo em 0,1 seg.)
Tempo que vai aguardar com a porta aberta ao atender uma chamada de pavimento
C17 – Tempo de porta aberta para chamadas do andar térreo (tempo em 0,1 seg.)
Tempo que vai aguardar com a porta aberta sempre que estive no pavimento principal.
C19 – Tempo de detecção de NAST (em segundos)
Tempo de viagem entre andares adjacentes, leitura de A15, quando definido 05 em B02.
tempo de viagem = parâmetro {A15 @(B02=05)}/10 valor mínimo 3
C20 – Aceleração e Desaceleração máximas (x 0,1 m/s ) 2
Limite máximo de aceleração e desaceleração permitido para a viagem Obs.: É recomendável, por
Faixa de valores de 001 a 015 valores recomendáveis = 005 questão de conforto que
C21 – Jerk máximo (0,1 m/s ) 3
Limite máximo para variação da aceleração e desaceleração C20 ≤ C21 ≤ 2C20
Faixa de valores de 001 a 040 valores recomendáveis = 005
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 39
C22 – Tempo de espera do freio para liberar o padrão (x 20 ms)
Após energizar o freio, o comando irá aguardar esse tempo liberar o padrão, no sistema de malha aberta, o
drive injetará corrente contínua para manter o motor freado eletricamente.
Faixa de valores de 000 a 100 valores recomendáveis = 004
C24 – Velocidade manual (m/min)
Velocidade máxima permitida para movimentação da cabina quando em manutenção / inspeção
Faixa de valores de 005 a 045 valor recomendável = 020
C26 – Velocidade inicial na partida (%)
Velocidade mínima que o comando mandará o drive movimentar a cabina no inicio da viagem. O valor
programado pode ocasionar uma partida brusca se for muito alto, ou não permitir a partida se for muito baixo.
Faixa de valores de 000 a 200 valor recomendável = 000
C27 – Posição do nivelamento para acionamento do freio (máquina sem encoder)
Distancia (em pulsos x 10) do nivelamento para que o comando mande fechar o freio, dependendo do ajuste
de abertura do freio, poderá ocorrer desnivelamento.
Faixa de valores de 000 a 500 valor recomendável = 000
C29 – Angulo de disparo do freio durante o nivelamento (%)
Durante o nivelamento pode-se controlar o nível de tensão de alimentação do freio.
Faixa de valores de 005 a 100 valor recomendável = 060
C32 – Efeito da tração
001 – 1:1 tração simples
002 – 2:1 tração dupla
C33 – Diâmetro da polia (mm)
Vide placa de especificação na máquina
C34 – Rotação da polia de tração
Vide placa de especificação na máquina
C36 – Número do painel
Para identificação do carro no sistema
C37 – Habilitação de estacionamento
000 – não habilita o retorno automático da cabina ao pavimento de estacionamento C13.
001 – habilita o retorno automático da cabina ao pavimento de estacionamento C13
C38 – Número de dentes da roda dentada
Valor fixo = 032
C39 – Rotação síncrona do motor Sendo: N = rotação síncrona
N = 120 x F F = Frequencia máxima do inversor
P P = Numero de polos
C40 – Grupo da placa de atenuação
000 – 220V 001 – 380V 002 – 440V
C41 – Tensão nominal da rede
Seleção da tensão disponível
C43 – Seleção de atendimento das chamadas de pavimento
000 – Atende todos os pavimentos
001 – Atende somente os andares pares, principal, estacionamento e inferiores ao principal.
002 – Atende somente os andares impares, principal, estacionamento e inferiores ao principal.
003 – Atende somente chamadas de cabina, utilizado em ajustes.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 40
C44 – Cancelamento de chamada falsa
Se a cabina parar três vezes por chamada de cabina e não for detectado o sinal de PP/RMC atuado, o
comando cancela todas as chamadas restantes.
000 – Cancela / 001 – Não cancela
*C45 – Ganho integral de velocidade na aceleração (oscilação lenta)
Atenuação das oscilações lentas que ocorrerem durante a aceleração
de 1 a 20 usual = 004
*C46 – Ganho proporcional de velocidade na aceleração
Atenuação das oscilações rápidas que ocorrerem no inicio da aceleração
de 1 a 20 usual = 008
*C47 – Ganho integral de velocidade na desaceleração
Atenuação das oscilações lentas que ocorrerem durante a desaceleração
de 1 a 20 usual = 005
*C48 – Ganho proporcional de velocidade na desaceleração
Atenuação das oscilações rápidas que ocorrerem no final da desaceleração
de 1 a 20 usual = 010
*Obs.: Os parâmetros C45, C46, C47 e C48, só deverão ser alterados no caso de ocorrer oscilações, no momento
da aceleração e/ou desaceleração, valores muito alto realçam as oscilações, e muito baixo podem fazer com
que o comando perca o posicionamento da cabina, não permitindo o nivelamento.
C49 – Escorregamento do motor
Vide TABELA DE CONFIGURAÇÃO DO MOTOR (E2 – 02 / pg. 01 / seção 11)
C50 – Senha para liberação de modificação de parâmetros
031
d00 - ARQUIVOS DAS ULTIMAS 64 FALHAS
Estão registradas as ultimas 64 falhas juntamente com seus respectivos complementos.
PROCEDIMENTO:
Quando em "d00", aperte o botão “ENTER” (direita).
Aparecerá a ultima falha, ao pressionar o botão “DESCE” (esquerda) aparecerá o complemento da ultima
falha. Pressionar novamente o “DESCE” aparecerá a penúltima falha, e após o complemento, e assim na
seqüência (falha ⇒ complemento) até a 64ª falha. A cada entrada de nova falha a pilha é empurrada para
baixo.
Para sair é só pressionar a tecla “ENTER”
d01 - GRAVAÇÃO DOS PARÂMETROS
000 - não habilita a gravação
001 - habilita a gravação dos parâmetros "Cxx" e "Exx"
002 - reset dos arquivo de falhas em "d00"
EXX – Ajuste do display
Nos parâmetros de E00 à E24 são inseridos os caracteres que deverão ser mostrados nos IPD’s.
Sendo:
E00 – Primeira parada
E01 – Segunda parada...
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 41
Falhas do Excel VVVF e Ex800 VVVF
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Ocorreu NAST durante a viagem
Falha ou atraso de pulsos INA e/ou INB, durante a aceleração.
000 Fusível 4 A (fus.. 3) ou fiação interrompida.
Causa
Cabina presa nas guias.
Software e/ou configuração de parâmetros.
► Ocorreu NAST durante a aceleração.
Falha de INA e/ou INB, durante a aceleração.
F01 001 Fusível 4 A (fus. 3) ou fiação interrompida.
Causa
Cabina presa nas guias.
Software e/ou configuração de parâmetros.
► Ocorreu NAST durante a desaceleração.
Falha INA e/ou INB, durante a desaceleração.
002 Fusível 4 A (fus. 3) ou fiação interrompida.
Causa
Cabina presa nas guias.
Software e/ou configuração de parâmetros.
Ocorreu NAST no final da viagem
►
000 O tempo máximo de viagem entre andares adjacentes foi ultrapassado
Causa Software
► Ocorreram três falhas seguidas de NAST na mesma viagem
001
Causa Software
F02
► Tempo máximo de viagem de extremo a extremo foi ultrapassado (AST)
002
Causa Software
► Ocorreram três falhas seguidas de AST na mesma viagem
003
Causa Software
Houve 3 tentativas seguidas de fechamento de porta e ocorreu erro na sequência de
►
F03 xxx porta, PC ou CT atua junto com LPA
Causa Falha nos contatos e/ou posicionamento de PP, PC, CT e LPA
Houve 3 tentativas seguidas de fechamento de porta e ocorreu PC ou CT antes de
►
F04 xxx fechar a porta (atuar PP)
Causa Falha nos contatos e/ou posicionamento de PP, PC e CT
► Houve 3 tentativas seguidas de fechamento de porta e CT atuou antes do PC
F05 xxx
Causa Falha nos contatos e/ou posicionamento de PP, PC, CT e RMT
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 42
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Houve 3 tentativas seguidas de fechar a porta e não foi detectado PC
Falha no contato de PC.
000 Falta de ajuste de PC.
Causa Tempo de fechamento de porta muito lento.
F06 Parâmetro configurado com valor insuficiente
(C05 para Excel e C49 para Ex800)
► Houve 10 tentativas seguidas de fechar a porta e não foi detectado PC
001 Tempo insuficiente em C05 ou C49.
Causa
Alimentação e/ou sinal para operador falhando
Houve 3 tentativas de fechamento de porta e não se verificou a detecção de CT
►
Tempo máximo para detecção de CT/RMT (6 seg.) ultrapassado.
F07 XXX Falha no contato de CT.
Causa Falta de ajuste de CT.
Falha no contato e/ou posicionamento de RMT
Houve 3 tentativas de abertura de porta e não foi detectado LPA
►
Tempo máximo para detecção de LPA (12 seg.) ultrapassado após acionamento da PA.
F08 XXX Falha no contato de LPA.
Causa Falta de ajuste de LPA.
Tempo insuficiente de C05 para Excel e C49 para Ex800
► Após entrada da manobra (iniciar viagem) passou 2 segundos e o freio não foi liberado.
Baixa tensão sendo inserida na bobina do freio.
000 Valor do parâmetro C32 muito baixo.
Causa Não está ocorrendo disparo na placa controladora do freio
Sem presença de corrente no freio monitorada por IF e F+
Circuito de alimentação da bobina do freio aberto.
► Ocorreram três falhas F18
001 Falha nos sensores ópticos (IS e/ou ID) da cabina.
Causa Falha no posicionamento das aletas de pavimento
Falha no posicionamento dos limites
F09 Ocorreu falha nos sensores IS/ID
►
(é necessário realizar nova rebitagem)
003
Falha nos sensores ópticos (IS e/ou ID) da cabina.
Causa
Falha no posicionamento das placas de pavimento
Ocorreu alguma falha durante a reinicialização
►
(é necessário realizar nova viagem de aprendizado)
004
Software
Causa
Erro na configuração dos parâmetros C00, C01, C19 e C24
► Ocorreram três falhas durante a mesma viagem de reinicialização
005 Software
Causa
Erro na configuração dos parâmetros C00, C01, C19 e C24
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 43
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Fuga massa durante a viagem
000
Causa Linha CX e/ou CY em contato com “massa” do sistema.
► Excesso de carga (110%).
001 Erro na configuração do parâmetro C42.
Causa
F10 Falha no ajuste e/ou ligação do pesador de carga
► Fuga massa durante o fechamento da porta
002
Causa Linha CX e/ou CY em contato com “massa” do sistema.
► Fuga massa durante a viagem manual
003
Causa Linha CX e/ou CY em contato com “massa” do sistema.
► Atuou o termistor do motor.
F11 000
Causa Defeito no circuito do termistor. (90-91).
► Passou-se 1 minuto e PP não foi detectado durante o fechamento da porta
F12 xxx
Causa Tempo máximo para detecção de PP (60 seg.) ultrapassado.
Ocorreram mais de 10 reaberturas de portas por causa do PP estar falhando ou
►
ocorrência de SEGG
F13 xxx
Falha no contato de PP.
Causa
Falta de ajuste da PP.
► Botão PO acionado por mais de 60 segundos
000 Mau contato na ligação do botão PO.
Causa
Defeito no botão PO.
F14 ► Falha na fotocélula
001 Erro na configuração do parâmetro C07
Causa Falha no circuito da fotocélula
Defeito na fotocélula ou BPE / RMC
► Tempo máximo para detecção de RMT (6 seg. aberta) ultrapassado.
F15 000 Erro na configuração do parâmetro C08
Causa Falha no ajuste mecânico da rampa magnética da cabina
Falha no circuito de alimentação e/ou sinalização da RMT
► Após 6 segundos e CT não foi detectado durante a abertura de porta
F16 000 Erro na configuração do parâmetro C08
Causa Falha no ajuste mecânico da rampa magnética da cabina
Falha no circuito de alimentação e/ou sinalização da RMT
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 44
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Atuou segurança geral em movimento
001 Algum dispositivo da linha de segurança atuou
Causa
Falha na alimentação da linha SEGG
► Falhou PP
002 Falha no contato de PP
Causa
Falha no ajuste mecânico de PP
► Falhou PC
003 Falha no contato de PC
Causa
Falha no ajuste mecânico de PC
► Falhou CT
004 Falha no contato de CT
Causa
Falha no ajuste mecânico de CT
F17 ► Falhou SEGP
005 Falha na linha de segurança geral e/ou segurança de portas.
Causa Jumper no circuito de portas
Defeito na placa CPU ou I/O
► Atuou SEGG ou SEGP após fechamento da porta , antes do elevador partir
006 Falha na linha de segurança geral e/ou segurança de portas.
Causa
Jumper no circuito de porta
► Atuou segurança geral durante o aprendizado (rebitagem)
007 Algum dispositivo de segurança atuou após o comando de aprendizado automático
Causa
Falha na alimentação da linha SEGG
► Falha no sensor de nivelamento
008 Falha no circuito dos sensores de nivelamento
Causa
Defeito na placa I/O
Parada fora de xxx
►
xxx ⇒ o pavimento de ocorrência
F18 xxx
Falha nos sensores IS e/ou ID posicionamento em cima da cabina
Causa
Falha no posicionamento das placas de pavimento
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 45
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Falha de comunicação
000 Falha de memória (processamento interno - MRB)
Causa
Defeito na placa CPU (circuito de comunicação)
► Varias tentativas de comunicação sem êxito.
001 Falha de memória (processamento interno - SRB)
Causa Defeito na placa CPU (circuito de comunicação)
Defeito no cabo de comunicação.
► Falha de memória e reset da CPU
002
Causa Falha no processamento interno
F19 ► Falha na inicialização da rede de comunicação entre os carros
Erro na configuração do parâmetro C36
003 Grupo incorreto da placa CPU (JV0130 / JV0271)
Causa Falha no cabo de comunicação em rede (coaxial)
Falta de terminação de 75 Ω
Defeito na placa CPU
► Falha de comunicação entre tarefas
Falha de comunicação serial intermitente ocasionado por ruído
004 Em duplex com comunicação serial quando ocorre a falha provoca o reset da CPU.
Causa Erro na configuração de parâmetros.
Software desatualizado
Problemas na CPU
Falha nos dados da EEPROM (parâmetro C).
►
000 Somente para as CPU JV0270 e JV0271
Causa Falha nos dados da NVRAM (parâmetro E)
Falha nos dados da EEPROM (parâmetro E).
►
001 Somente para as CPU JV0270 e JV0271
Causa Falha nos dados da NVRAM (parâmetro C)
F20
Falha nos dados da EEPROM (é necessário realizar nova rebitagem). Somente para as
►
002 CPU JV0270 e JV0271
Causa Defeito na memória EEPROM e/ou placa CPU
► Falha nos dados da NVRAM (parâmetro H - placa JV229)
003
Causa Defeito na memória EEPROM e/ou placa CPU
► Falha de sobre aquecimento do enrolamento do motor
F21 000
Causa Idem F11 – 000.
Falha no sensor de zona de nivelamento led (L_SN)) durante pré-abertura ou durante
►
renivelamento , complemento será o pavimento de ocorrência.
F22 xxx
Falhas nos reeds de leitura de zona de nivelamento.
Causa
Falha na placa de segurança, no sensor de velocidade de nivelamento
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 46
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Houve reversão de mais de 20 pulsos
F23 000 Ligação invertida de INA e INB
Causa Falta de torque no motor, causando retrocesso na partida da cabina.
Balanceamento incorreto entre cabina e contrapeso
001 ► Falta sinal INA no sensor do limitador.
Falha nos sinais INA e INB
002 ►
(somente para máquinas definidas sem encoder)
F24 Falha na ligação de INA e INB
Falha nos sensores de velocidade (encoder, buffer da máquina e/ou limitador)
Causa
Falta de torque no motor, causando retrocesso na partida
Balanceamento incorreto entre cabina e contrapeso
► Falha no controle de velocidade (erro de velocidade) em automático
000 Falha nos sinais INA e INB
Causa
Não trava o elevador até 2 falhas
► Velocidade esta 110% da velocidade máxima síncrona
001 Má configuração do parâmetro C03.
Causa
Falha nos sinais INA e INB
► Velocidade em manual maior que 45m/min
002 Má configuração do parâmetro C03.
F25 Causa
Falha nos sinais INA e INB
► Ocorreram 3 ou mais falhas F25-000
Falha na ligação de INA e INB
Falha na ligação do sinal de referência no inversor: G5 = 13 e 17 ou L7 = A1 e AC
003 Configuração incorreta dos parâmetros : C32, C33, C34, C39, E1-04 e E1-06
Causa Falha na buffer da máquina
Falha na buffer do limitador JV0132
Falha na CPU
Falha na placa de segurança se houver
► Houve falha de segurança de porta durante o fechamento de porta
F28 xxx Falha na placa CPU
Causa
Falha na placa I/O
► Erro na seqüência de fase
F31 000
Causa Fases ligadas na seqüência incorreta
► Falta de fase LO1 / U
F32
000 Detecção por tensão (L11, L12, L13).141
► Falta de fase L02 / V
F33
000 Detecção por tensão (L11, L12, L13).
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 47
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► Falta de fase L03 / W
000 Detecção por tensão (L11, L12, L13).
F34 Falha na monitoração das fases
Causa Falta alimentação no comando.
Falha na conexão do comando com a rede elétrica
► Falha de sobre-tensão
F35 000 Média das tensões de entrada > de 125% da tensão configurada em C41
Causa
Falha na placa CPU e/ou CPU
► Falha de sub-tensão
F36 000 Média das tensões de entrada < 75% da tensão configurada em C41
Causa
Falha na placa I/O e/ou CPU
► Falha de sincronismo da rede
F37 000 Erro na seqüência de ligação das fases:
Causa
L01, L02, L03 / L11, L12, L13 / U, V, W.
Falha no sensor de nivelamento (reed 1 não fechou).
►
Só ocorre se tiver renivelamento.
F38 000 Mau contato na ligação do reed superior do sensor de RNA.
Causa Posicionamento incorreto das placas de pavimento.
Reed-switch danificado
Falha no sensor de nivelamento (reed 1 fechou e reed 2 não).
►
Só ocorre se tiver renivelamento.
Mau contato na ligação do reed inferior do sensor de RNA.
F39 000 Mau contato na ligação da saída do detector de velocidade de nivelamento (V18 da
placa de segurança JV0249 ou JV0259)
Causa
Placa de segurança desregulada
Posicionamento incorreto das placas de pavimento.
Reed-switch danificado
► Falha no contador A.
000 Contator A não ligou
F41 001 Contator A ligou e ficou grudado
Falha no circuito da bobina A.
Causa Falha no contato e/ou na linha de monitoração do contator
Falha na Placa I/O
► O estado do relê AUT1 não coincide com do AUT2
F42 000
Causa Falha na Placa CPU
► O estado do relê SEG1 não coincide com do SEG2
F43 000 Falha na Placa CPU
Causa
Falha na Placa I/O
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 48
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
O estado do relê NIV1 não coincide com do NIV2
►
F44 000 A falha ocorre se estiver renivelamento e com RNA ativo e com encoder
Causa Falha na Placa I/O
► Falha no contador S.
000 Contator S não ligou
F45 001 Contator S ligou e ficou grudado
Falha no circuito da bobina S.
Causa Falha no contato e/ou na linha de monitoração do contator
Falha na Placa I/O
► Falha no contador D.
000 Contator D não ligou
001 Contator D ligou e ficou grudado
F46 Falha no circuito da bobina D.
Causa Falha no contato e/ou na linha de monitoração do contator
Falha na Placa I/O
► Falha no sensor LD3.
002
Causa Software
Excel► Falha no contador RUN.
000 Contator RUN não ligou
001 Contator RUN ligou e ficou grudado
Falha no circuito da bobina RUN
F47 Falha no contato e/ou na linha de monitoração do contator
Causa
Falha na Placa I/O
Falha na Placa CPU
Ex800► e8 O estado do relê SEG1 não coincide com do SEG2
000 Falha no circuito da Segurança Geral
Causa
Falha na Placa CPU
Falha no sensor de nivelamento (um dos reed deve ter grudado)
Excel►
A falha ocorre se estiver renivelamento e com RNA ativo e com encoder
000 Falta de indutor em série com os reed’s de nivelamento.
Falha na ligação dos reed’s
Causa
Defeito no reed-switch.
F48 Configuração do parâmetro C06
Ex800► O estado do relê SEG3 não coincide com do SEG4
000 Falha no circuito da Segurança Geral e/ou Segurança de Porta
Causa (Contato de Trinco - CT )
Falha na Placa CPU
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 49
Falhas do Excel e Ex800 Obs.
Código de Falhas AST - Tempo de viagem entre extremos
Complemento NAST - Tempo de viagem entre andares adjacentes
Comentário XXX - pavimento de ocorrência
► O estado do relê AUT1 não coincide com do AUT2
000 Falha no circuito do acionamento AUT/MAN na cabina ou casa de máquinas
Causa
Falha na Placa CPU
F49 ► Falha no Contator AC, contator “grudou” ligado.
001 Defeito no contator (bobina travada)
Causa Curto circuito na ligação entre o contato 14/13 do contator AC e a placa I/O.
Defeito na placa CPU / I/O.
Ex800► Falha na indicação de inversor pronto
Inicio de viagem
000 ►
(contato MF do inversor fechado)
F50 Final de viagem
►
(contato MF do inversor aberto)
001
Falha no circuito de sinalização do inversor
Causa
Falha no Inversor
► Comando de viagem inválido
F51 000 Falha no circuito do acionamento AUT/MAN na cabina ou casa de máquinas
Causa
Falha na Placa CPU
► Erro no controle de velocidade
Falha na leitura de pulsos da placa buffer.
F52 000 Parâmetro incorreto das caracteristicas da máquina.
Causa
Frequência de acionamento errada
Falha no Inversor
► Houve reversão de mais de 5 pulsos
F53 000 Ajuste de tempo de freio
Causa
Ajuste de torque no inversor
► Botão preso (Botão de pavimento ou cabina está "oscilando")
F54 xxx Fuga de massa
Causa Defeito no botão
Aterramento
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 50
Tabelas
Tabelas de Limites do Excel e EX800
m/min 45 60 75 90 105 120 150
Velocidade.
m/s 0,75 1 1,25 1,50 1,75 2,00 2,50
LCS /LCD -0,20 -0,20 -0,20 -0,20 -0,20 -0,20 -0,20
LS1/LD1 - 0.05 - 0.05 - 0.05 - 0.05 - 0.05 - 0.05 - 0.05
LS3/LD3 0,50 0,85 1,25 1,70 2,25 2,25 2,25
LS4/LD4 2,90 4,40
LRS/LRD 0,85 1,30
MBS1/D1 0,10 010
MBS2/D2 0,25. 0,40
MBS3/D3 0,55 0,90
MBS4/D4 1,00. 1,60
Limite Aplicação Referência
LCS / LCD Limite de Final de Curso Superior / Inferior Limite de parada
LS1 / LD1 Limite de Parada Superior / Inferior Nivelamento
LS3 / LD3 Limite de Corte de Alta Superior / Inferior Limite de parada
LS4 / LD4 Limite de Preparação para o Corte de Alta Superior / Inferior Limite de parada
LRS / LRD Limite de Reversão no extremo Superior / Inferior Limite de parada
MBSX / DX Limites de Controle de Velocidade da Placa de Segurança Limite de parada
Tabela de Sinalização Excel VVVF
C04
Sinal Função Sinal Função
Au..Pu, Ad..Pd G0... G7
000 IPD 7 Segmentos Seta Bargraph
Au, Bu = IP1/IP2 serial
005 Eu, Fu = Seta D (pav) Seta Matricial
Gu, Pu = Seta S (pav)
Au, Bu = IPM Matricial
013 Eu, Fu = Seta D (Cab) Seta Matricial
Gu, Pu = Seta S (Cab)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 51
Inversor Yaskawa L7
Parâmetros
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Seleção da linguagem para o operador
digital. Este parâmetro não é reinicializado 0
Seleção da língua
A1-00 pelo parâmetro A1-03 ~ 0 6
Select Language
0: Inglês 6
6: Português
Seleciona quais parâmetros são alteráveis via
operador digital
Seleção do nível 0
0: Somente operação
A1-01 de acesso ~ 2 2
1: Nível do usuário (só disponíveis se os
Access Level 2
parâmetros A2 forem alterados)
2: Nível avançado
Seleção do Seleciona o método de controle do drive
0 2 = MA
método de 0: Controle V/F (sem realimentação)
A1-02 ~ 3
controle Control 2: Vetorial de malha aberta
3 3 = MF
Method 3: Vetorial de fluxo (malha fechada)
Retorna todor os parâmetros ao default de
Parâm. de fábrica ou do usuário 0
A1-03 inicialização 0: Não inicializa ~ 0 0
Init Parameters 1110: Inicialização do usuário 2220
2220: Inicialização a 2-fios
Quando o valor setado em A1-04 não é o 0
Senha 1 mesmo que o setado em A1-05, os ~
A1-04 0 0031
Enter Password parâmetros A1-01 ao A1-03 e A2-01 ao A2- 9999
32 não podem ser alterados
Seleciona a fonte de entrada da referência de
frequência.
Seleção da 0: Operador digital/ Multi-velocidades
0
referência de 1: Terminais
b1-01 ~ 0 1
frequência 2: Comunicação Serial - Modbus RS-422/485
3
Reference Source terminais R+, R-, S+, e S-
3: PCB opcional – Cartão opcional conectado
em 2CN
Seleciona a fonte de entrada do comando
rodar
0: Operator digital
Seleção do 0
1: Terminais
b1-02 comando rodar ~ 1 1
2: Comunicação serial - Modbus RS-422/485
Run Source 3
terminais R+, R-, S+, e S-
3: PCB opcional – Cartão opcional conectado
em 2CN.
Seleção do Seleciona o método de parada quando o
0 0 = MA
método de comando rodar for removido
b1-03 ~ 0
parada 0: Parada por rampa
1 1 = MF
Stopping Method 1: Parada por inércia
Proibição de 0
0 – Comando reverso habilitado
B1-04 Operação Reversa ~ 0 0
1 – Comando reverso desabilitado
Reverse Oper 1
Ajusta a taxa dos scans nas entradas digitais.
Tempo de scan
0: 2 scans a cada 2mseg (para melhor 0
das entradas
b1-06 resposta). ~ 1 1
digitais
1: 2 scans a cada 5mseg (para ambientes 1
Cntl Input Scans
com ruídos).
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 52
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Tempo de 0.00
Ajusta o tempo para acelerar de zero para a
C1-01 aceleração 1 ~ 3.00 s 0,00s
frequência máxima .
Accel Time 1 600.00
Tempo de 0.00
Ajusta o tempo para desacelerar da
C1-02 desaceleração 1 ~ 3.00sec 0,00s
freqüência máxima para zero
Decel Time 1 600.00
Tempo de Ajusta o tempo para acelerar de zero para a 0.00
C1-03 aceleração 2 frequência máxima quando acionando uma ~ 3.00sec 0,00s
Accel Time 2 entrada multi função 600.00
Tempo de Ajusta o tempo para desacelerar da 0.00
C1-04 desaceleração 2 freqüência máxima para zero quando ~ 3.00sec 0,00s
Decel Time 2 acionando uma entrada multi-função 600.00
Tempo de Ajusta o tempo para acelerar de zero para a 0.00
C1-05 aceleração 3 frequência máxima quando acionando uma ~ 3.00sec 0,00s
Accel Time 3 entrada multi-função 600.00
Tempo de Ajusta o tempo para desacelerar da 0.00
C1-06 desaceleração 3 freqüência máxima para zero quando ~ 3.00sec 0,00s
Decel Time 3 acionando uma entrada multi-função 600.00
Tempo de Ajusta o tempo para acelerar de zero para a
C1-07 aceleração 4 frequência máxima quando acionando uma 0,00s
Accel Time 4 entrada multi-função
Tempo de Ajusta o tempo para desacelerar da 0.00
C1-08 desaceleração 4 freqüência máxima para zero quando ~ 3.00s 0,00s
Decel Time 4 acionando uma entrada multi-função 600.00
Ajusta o tempo para desacelerar da
Tempo da parada 0.00
freqüência máxima para zero quando
C1-09 de emergência ~ 3.00sec 0,00s
acionando uma entrada multi-função setada
Fast Stop Time 600.00
em “parada de emregência”
Unidade de ajuste
0: 0.01
C1-10 da acel/desacel 0,1 0 1
1: 0.1
Acc/Dec Units
Ajusta a frequência para o chaveamento
automático dos tempos de acel/desacel.
Nível da Freq. Saída < C1-11:
frequência de tempo de acel/desacel 4
0.0
chaveamento do Freq. Saída >= C1-11:
C1-11 ~ 0.0 Hz 0.0 Hz
tempo de Tempo de acel/desacel 1
120.0
acel/desacel As entradas multi-função
Acc/Dec SW Freq “Multi acel/desacel 1” e
“Multi acel/desacel 2”
tem prioridade sobre C1-11
Tempo da curva-
0.00
S no início da
C2-01 Tempo Comando rodar Frequência de saída ~ 0.50 s 0.00s
aceleração
2.50
SCrv Acc @ Start
Tempo da curva-
0.00
S no fim da A curva S é utilizada para suavizar a rampa
C2-02 ~ 0.50s 0.00s
aceleração de aceleração e a rampa de parada.
2.50
SCrv Acc @ End
Tempo da curva-
0.00
S no início da Quento maior for esta curva, mais suaves
C2-03 ~ 0.50sec 0.00s
desaceleração serão as rampas de acel. e desacel.
2.50
SCrv Dec @ Start
Tempo da curva-
0.00
S no fim da A curva S é utilizada para suavizar a rampa
C2-04 ~ 0.50sec 0.00s
desaceleração de aceleração e a rampa de parada.
2.50
SCrv Dec @ End
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 53
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Tempo da curva- 0.00
Quento maior for esta curva, mais suaves
C2-05 S no nível ~ 0.50sec 0.00s
serão as rampas de acel. e desacel.
SCrv @ Level 2.50
Ganho da
0.0
compensação de Esta função controla a frequência de saída na
C3-01 ~ 1.0 1.00
escorregamento resposta da demanda do torque de carga
2.5
Slip Comp Gain
Tempo de atraso
primário na comp. Ajusta o tempo de atraso de compensação de 0
C3-02 de escorregamento quando o motor está instável ~ 2000 ms 240
escorregamento ou a resposta de velocidade é lenta 10000
Slip Comp Time
Limite da Este parâmetro ajusta o valor máximo para a
0
compensação de compensação de escorregamento. Seu ajuste
C3-03 ~ 200% 200
escorregamento é em porcentagemdo valor de
250
Slip Comp Limit escorregamento nominal.
Compensação de
escorregamento 0
0: Desabilitado
C3-04 durante a ~ 1 0
1: Habilitado
regeneração 1
Slip Comp Regen
Este parâmetro ajusta o ganho para a função
Ganho da
do torque boost automático do drive, 0.00
compensação de
C4-01 combinando a tensão de saída do Drive, com ~ 1.00 1.00
torque
a carga do motor, Este parâmetro ajuda o 2.50
Torq Comp Gain
motor a ter um torque de saída melhor.
Este parâmetro ajusta o filtro na saída da
Tempo da
função de 0
compensação de
C4-02 compensação de torque, aumente para dar ~ 200 ms 80 ms
torque constante
estabilidade, e diminua para aumentar a 10000
Torq Comp Time
resposta.
Ganho
0.00
proporcional ASR Ajusta o ganho proporcional da malha do
C5-01 ~ 40.00 20.00
1 controle de velocidade (ASR)
300.00
ASR P Gain 1
Tempo integral 0.000
Ajusta o tempo integral da malha do controle
C5-02 ASR 1 ~ 0.500s 0.500s
de velocidade (ASR)
ASR I Time 1 10.000
Ganho
0.00
proporcional ASR Ajusta o ganho proporcional 2 e o tempo
C5-03 ~ 20.00 20.00
2 integral 2da malha de controle de velocidade
300.00
ASR P Gain 2
Tempo integral 0.000
Ajusta o ganho proporcional 2 e o tempo
C5-04 ASR 2 ~ 0.500s 0.500s
integral 2da malha de controle de velocidade
ASR I Time 2 10.000
Tempo de atraso Ajusta a constante para o tempo da malha de
0.000~0.
C5-06 da saída ASR velocidade para o comando de saída de 0.004s 0.004s
500
ASR Delay Time torque
Frequência do
Ajusta a frrequêncioa de chaveamanto entre 0.0
chaveamento ASR
C5-07 o ganho proporcional 1,2 e o tempo integral ~ 0.0 Hz 3.0
ASR Gain SW
1,2 120.0
Freq
Limite integral Ajusta o limite integral ASR e a carga nominal 0
C5-08 ASR como porcentagem da frequência máxima de ~ 400% 400%
ASR I Limit saída 400
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 54
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
1: 2.0 kHz
2: 5.0 kHz
Seleção da 3: 8.0 kHz
1
freqüência 4: 10.0 kHz
C6-02 ~ 3 6
portadora 5:12.5 kHz
F
CarrierFreq Sel 6: 15.0 kHz
F: Programável (determinado pelos ajustes
em C6-03 até C6-07)
Ajuste da tensão 155 220
Ajuste neste parâmetro a tensão de entrada
E1-01 de entrada ~ 200 VAC ~
do Drive
Input Voltage 255 440
Seleção do Padrões pré-fixados. 0
E1-03 padrão V/f ~ F F
V/f Selection F: V/f Customizado FF
Estes parâmetros são somente aplicáveis
Frequência máx 0.0
quando o padrão V/f é setado em
E1-04 de saída ~ 60.0Hz Tab1
customizável (E1-03= F) para ajustar as
Max Frequency 120.0
características da curva V/f linearmente,
Tensão máx de ajuste os mesmos valores para E1-07 e E1- 0.0 220 Vac
200.0
E1-05 saída 09. Neste caso, o ajuste para para E1-08 ~ 380 Vac
VAC
Max Voltage será desconsiderado. 255.0 440 Vac
Esteja certo que as quatro frequências
0.0
Frequência base obedecem a seguinte ordem, para que a Tab1
E1-06 ~ 60.0Hz
Base Frequency falha OPE10 não ocorra: *5
120.0
E1-04 = E1-11 = E1-06 > E1-07 = E1-09
Frequência média 0.0
E1-07 de saída A ~ 3.0Hz 3.0Hz
Mid Frequency A 120.0
Tensão média de 0.0 12.6 Vac
E1-08 saída A ~ 11.0 VAC 20.9 Vac
Mid Voltage A 255.0 54.2 Vac
Minima
0.0
frequência de
E1-09 ~ 0.5Hz 0.1
saída
120.0
Min Frequency
Minima tensão de 0.0 2.2 Vac
E1-10 saída ~ 2.0 VAC 2.8 Vac
Min Voltage 255.0 4.4 Vac
Frequência média Ajuste somente se necessitar um ajuste 0.0
E1-11 de saída B preciso da V/f na área acima da velocidade ~ 0.0Hz 0.0Hz
Mid Frequency B base. Geralmente não é necessário o ajuste 120.0
Tensão média de 0.0
E1-12 saída B ~ 0.0VAC 0.0 Vac
Mid Voltage B 255.0
0.0 220 Vac
Tensão Base
E1-13 ~ 0.0VAC 380 Vac
Base Voltage
255.0 440 Vac
Os valore mostrado aqui são para inversores
*1: de classe 200V. Dobre estes valores para
inversores de classe 400V.
Corrente nominal Ajuste com o valor nominal da corrente do 1.75
E2-01 do motor motor. Este valor é automáticamente ajustado ~ 14.00A Tab2
Motor Rated FLA no auto-ajuste 35.00
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 55
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Ajuste com o valor do escorregamento
Escorregamento 0.00
nominal do motor. Este valor é
E2-02 nominal do motor ~ 2.73 Hz Tab2
automáticamente alterado no auto ajuste
Motor Rated Slip 20.00
dinâmico.
Ajuste com a corrente de magnetização do
Corrente do motor motor como porcentagem da corrente 0.00
E2-03 sem carga nominal do motor (E2-01). Este valor é ~ 4.50A Tab2
No-Load Current automáticamente alterado no auto ajuste 13.99
dinâmico
Numeros de polos 2
Este valor é automáticamente alterado no Tab2
E2-04 do motor ~ 4
auto ajuste. *4
Number of Poles 48
Resistência entre 0.000
Este valor é automáticamente alterado no
E2-05 fases do motor ~ 0.771Ω Tab2
auto ajuste.
Term Resistance 65.000
Ajuste a queda de tensão de acordo com a
Indutância de
indutância de vazamento do motor como uma 0.0
vazamento do
E2-06 porcentagem da tensão nominal do motor. ~ 19.6% Tab2
motor
Este valor é automáticamente alterado no 40.0
Leak Inductance
auto ajuste.
Compensação de
Ajuste o coeficente de saturação do motor 0.00
saturação 1
E2-07 como 50% do fluxo magnético. Este valor é ~ 0.50 Tab2
Saturation Comp
automáticamente alterado no auto ajuste 0.50
1
Compensação de
Ajuste o coeficente de saturação do motor E2-07
saturação 2
E2-08 como 75% do fluxo magnético. Este valor é ~ 0.75 Tab2
Saturation Comp
automáticamente alterado no auto ajuste 0.75
2
Ajuste a perda mecânica do motor como uma
porcentagem da potência nominal do
motor. Ajuste nas seguintes
Perda mecânica 0.0
curcunstâncias:
E2-09 do motor ~ 0.0% Tab2
--Quando a perda de torque é maior por
Mechanical Loss 10.0
causa da fricção da engrenagem do
motor.
–Quando a perda de torque na carga é alta.
Número de pulsos 0
F1-01 do encoder Ajusta o número de pulsos do encoder ~ 1024 1000
PG Pulses/Ver 60000
Ajusta o método de parada quando for
Seleção de detectada a falha de perda de realimentação
operação durante (PGO)
0
a perda de 0: Parada por rampa
F1-02 ~ 1 1
realimantação 1: Parada por inércia
3
(PGO) 2: Parada de emergência
PG Fdbk Loss Sel 3: Somente alarma – O drive continua a
operação.
Ajusta o método de parada quando ocorre
Seleção da uma falha de sobrevelocidade (OS).
operação na 0: Parada por rampa 0
F1-03 sobrevelocidade 1: Parada por inércia ~ 1 1
(OS) 2: Parada de emergência 3
PG Overspeed Sel 3: Somente alarma – O drive continua a
operação
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 56
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Seleção de
0: Parada por rampa
operação na
1: Parada por inércia 0
detecção do
F1-04 2: Parada de emergência ~ 3 3
desvio de
3: Somente alarma – O drive continua a 3
velocidade
operação
PG Deviation Sel
Seleção do
sentido de
0: Avante=C.C.W.
F1-05 rotação 0,1 0 0
1: Avante=C.W.
PG Rotation Sel
Nível do desvio 0
F1-10 GP ~ 10% 30%
PG Deviate Level 50
Seleção da
0
função do
H1-01 Entrada multi funções 1 ~ 24 24
terminal S3
88
Terminal S3 Sel
Seleção da
0
função do
H1-02 Entrada multi funções 2 ~ 14 14
terminal S4
88
Terminal S4 Sel
Seleção da
0
função do
H1-03 Entrada multi funções 3 ~ 3 3
terminal S5
88
Terminal S5 Sel
Seleção da
0
função do
H1-04 Entrada multi funções 4 ~ 4 4
terminal S6
88
Terminal S6 Sel
Seleção da
0
função do
H1-05 Entrada multi funções 5 ~ 6 60
terminal S7
88
Terminal S7 Sel
Seleção de
0
operação durante
H1-11 ~ 1 1
BB externo
1
External BB Sel
1: Zera a frequência de saída durante o BB.
3: Referência multi velocidade 1
4: Referência multi velocidade 2
14: Reset de falha
24: Falha Externa
60: Injeção CC Ativa
Seleção de
0
função do
H2-01 Saída multi função ~ 40 0
terminal M1-M2
43
Term M1-M2 Sel
Seleção de
10
função do
H2-02 Saída multi função ~ 41 7
terminal M3-M4
43
Term M3-M4 Sel
Seleção de
20
função do
H2-03 Saída multi função ~ 6 2
terminal M5-M6
43
Term M5-M6 Sel
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 57
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
0: Durante RODAR 1
Fechado = Quando um comando rodar for
ativo para o Drive, ou exista tensão na saída
do Drive.
2: Fref/Fout Concordante 1
Fechado = Quando a frequência de saída do
drive for igual a frequência referência +/- o
erro em
L4-02
7: Subtensão no barramento CC
Fechado = Quando a tensão no barramento
CC cai abaixo do nível setado em L2-05
Seleção do nível 0: 0 a ±10V
do canal 1 [11-bit + poloridade (positiva/negativa)
H3-01 0,1 0 0
(AI-14B CH1) entrada]
AI-14 CH1LvlSel 1: 0 a ±10V
Ganho do canal 1
Ajusta a frequência quando é entrado 10V,
(AI-14B 0.0~1000
H3-02 como 100.0% 100
CH1) .0
porcentagem da frequência máxima de saída.
Terminal A1 Gain
Bias do canal 1
Ajusta a frequência quando é entrado 0V, -100.0
(AI-14B
H3-03 como porcentagem da frequência máxima de ~ 0.0% 0
CH1)
saída. 100.0
AI-14 CH1 bias
Seleção do nível 0: 0 a ±10V
do canal 3 [11-bit + poloridade (positiva/negativa)
H3-04 0,1 0 0
(AI-14B CH3) entrada]
AI-14 CH3 LvlSel 1: 0 a ±10V
Entrada analógica
multi-função
0
canal 3(AI-14B
H3-05 Entrada analógica multi função ~ 2 0
CH3)
1F
AI-14 CH3
FuncSel
Ganho do canal 0.0
Ajusta a frequência quando é entrado 10V,
H3-06 3(AI-14B CH3) ~ 100.0% 100.0%
como porcentagem da frequência em H3-05
AI-14 CH3 gain 1000.0
Constante de Ajusta o tempo primário do filtro de atraso em 0.05 =
0.00
tempo do filtro da Seg para as duas entradas analógicas (A1 e MA
H3-12 ~ 0.03 s
entrada analógica AI-14B CH1,2,3). 0.00 =
2.00
Filter Avg Time Efetivo para controle de ruido, etc. MF
0: Desabilitado – O motor acelera na taxa de
aceleração ativa. O motor pode entrar em
stall se a carga for muito pesada ou o
tempo de aceleração for curto
Seleção da 1: Propósito geral – Quando a corrente de
prevenção de stall saída excede o valor L3-02, a aceleração 0
L3-01 durante a pára. A aceleração continua assim até que ~ 1 1
aceleração a corrente de saída caia abaixo deste 2
StallP Accel Sel nível.
2: Inteligente – A taxa de aceleração ativa é
ignorada. A aceleração será completa no
menor tempo possível sem exceder o
valor de corrente em L3-02
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 58
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Nível da Esta função é ativa quando L3-01 é “1” ou
prevenção de stall “2”. A corrente nominal do drive é 100%. 0
L3-02 durante a Diminua o valor setado se estiver em stall ou ~ 150% 200%
aceleração se estiver ocorrer uma corrente excessiva nos 200
StallP Accel Lvl ajustes de fábrica
Limite da
Ajusta o nível inferior de stall durante a
prevenção de stall 0
aceleração como um percentual da corrente
L3-03 durante a ~ 50% 100%
nominal do drive, quando a operação está em
aceleração 100
um limite de freqüência acima de E1-06.
StallP CHP Lvl
Quando utilizar um resistor de frenagem
utilize o ajuste "0".
Prevenção de stall
0: Desabilitado 0
durante a
L3-04 1: Propósito geral ~ 0 0
desaceleração
2: Inteligente 3
StallP Decel Sel
3: Prevenção de stall com resistor de
frenagem
Ajusta o contador do nújmero de vezes que o
drive irá executar auto reinício das falhas: GF,
Número de LF, OC, PF, PUF, RH, RR, OL1, OL2, OL3,
tentativas de OL4, UV1. Se o drive entrar em falha após 0
L5-01 reinício executar um reinício, o contador será ~ 2 10
automático incrementado. Quando o drive opera sem 10
Num of Restarts falha por 10 minutos, o contador será
reiniciado para o valor setado para o valor em
L5-01
Seleção da
operação de
0: Não aciona o relé de falha
L5-02 reinício 0,1 1 1
1: Aciona o relé de falha
automático
Restart Sel
Limite de torque Ajusta o valor do limite de torque como 0
L7-01 avante percentual do torque nominal. Quatro ~ 200% 300%
Torq Limit Fwd quadrantes individuais podem ser ajustados 300
Limite de torque Ajusta o valor do limite de torque como 0
L7-02 reverso percentual do torque nominal. Quatro ~ 200% 300%
Torq Limit Rev quadrantes individuais podem ser ajustados 300
Limite de torque
Ajusta o valor do limite de torque como 0
avante
L7-03 percentual do torque nominal. Quatro ~ 200% 300%
regenerativo
quadrantes individuais podem ser ajustados 300
Torq Lmt Fwd Rgn
Limite de torque
Ajusta o valor do limite de torque como 0
reversoregenerati
L7-04 percentual do torque nominal. Quatro ~ 200% 300%
vo
quadrantes individuais podem ser ajustados 300
Torq Lmt Ver Rgn
Seleção da Determina se a tecla Local/remoto do
função da tecla operador digital é funcional
o2-01 0,1 0 0
Local/remoto 0: Desabilitado
Local/Remote Key 1: Habilitado
Determina se a tecla stop no operador digital
Seleção da ira parar o drive assim que for pressionada
função da tecla quando o drive estiver funcionando por
o2-02 0,1 0 0
Stop comando remoto ou por comunicação.
Oper STOP Key 0: Desabilitado
1: Habilitado
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 59
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Limpa ou guarda os parâmetros do usuário.
Valor default dos
0: Sem mudanças 0
parâmetros do
o2-03 1: Ajusta como default (Grava os parâmetros ~ 0 1
usuário
do usuário como default) 2
User Defaults
2: Limpa tudo
0
Seleção do KVA Não altere, a não ser que foi trocada a placa
o2-04 ~ 4*
Inverter Model # de controle
FF
Seleção do tempo 0: Ao energizar – A contegem começa
de operação quando o inversor é energizado
o2-08 0,1 0 0
cumulativa 1: Ao rodar – A contagem começa somente
Elapsed Time Run quando o o comando rodar é ativo
Seleção do
0 1
método de 1: Spec norte-americano
o2-09 ~ para 1
inicialização 2: Spec europeu
2 L7C
Init Mode Sel
Este parâmetro controle a cópia de
parâmetros para e do operador digital
0: Seleção da cópia (sem função)
1: INV --> OP READ – Todos os parâmetros
são copiados do drive para o operador
Seleção da 0
digital.
o3-01 função de cópia ~ 0 0
2: OP --> INV WRITE todos os parâmetros são
Copy Function Sel 3
copiados do operador digital para o drive.
3: OP<-->INV VERIFY – Os parâmetros
contidos no operador digital são
comparados com aqueles inseridos no
drive
Seleção de
0: Desabilitado – Não permite a cópia dos
permissão de
o3-02 parâmetros 0,1 0 0
cópia
1: Habilitado – Cópia permitida
Read Allowable
Ajusta a frequência na qual a frenagem CC
Frequência de
inicia quando para por rampa. Se S2-01< E1- 0.0
início da injeção
S1-01 09, a frenagem CC inicia em E1-09. ~ 1.2Hz 0.5 Hz
de corrente CC
Nota: Quando em modo vetorial de fluxo, o 10.0
DCInj Start Freq
zero servo virá se S1-01.
CC no início Ajusta a corrente de frenagem CC
como um precentual da corrente nominal do
0
Corrente de drive
S1-02 ~ 50% 50%
frenagem Obs. A excitação CC é determinada pelo
100
ajuste em E2-03 quando operando em
vetorial de malha aberta.
Ajusta a corrente de frenagem CC como um
Corrente de precentual da corrente nominal do drive 0
S1-03 frenagem CC na Obs. A excitação CC é determinada pelo ~ 50% 50%
parada ajuste em E2-03 quando operando em 100
vetorial de malha aberta.
Tempo da injeção
da frenagem CC 0.00
S1-04 na partida Ajusta o tempo da frenagem CC na partida ~ 0.50s 0.0s
DCInj Time 10.00
@Start
Tempo da injeção
0.00
da frenagem CC
S1-05 Ajusta o tempo da frenagem CC na parada ~ 0.60 sec 0.00s
na parada
10.00
DCInj Time @Stop
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 60
Valor
Nome do
Range de Excel
No. Parâmetro Descrição Default
ajuste Ex800
Display
Tempo de atraso Ajusta o tempo antes que o comando do freio 0.00
S1-06 da liberação do seja liberado uma vez que o comando rodar ~ 0.20s 0.00s
freio seja acionado 10.00
Ajusta o tempo de atraso antes que o 0.00
Tempo de atraso
S1-07 comando para aplicar o freio seja acionado ~ 0.10s 0.00s
do freio
seguindo o comando que foi entrado. S1-05
Após que o comando rodar for acionado e 0
Tempo de
ambos S1-06 e S1-04 forem ultrapassados, ~
S1-14 detecção do SE2 200 ms 200 ms
uma falha SE2 será acionada caso a corrente (S1-04
ao inicializar
do inversor for menor que S1-08 /S1-06)
Enquanto o Drive está operando, uma falha
Tempo de 0
SE3 ocorrerá se o tempo en S1-15 passar e a
S1-15 detecção do SE3 ~ 200 ms 500 ms
saída do inversor for menor que o valor
durante rodar 5000
setado em S1-08
Seleciona o modo de auto ajuste
0: Auto ajuste dinâmico
(A1-02 = 2 ou 3)
0
1: Auto ajuste estático
~
(A1-02 = 2 ou 3)
Seleção do modo 2
2: Somente resistência dos terminais,
T1-01 de auto-ajuste 1
(estático)
Tuning Mode Sel F setting
(A1-02 = 0, 1, 2, ou 3)
=
3: Auto ajuste para a quantidade de
(0~3)
compensação On-Delay (modos vetorial 2
sem PG e vetorial com PG são
habilitados).
Potência nominal 0.00
T1-02 do motor Ajusta a potência nominal do motor em KW ~ 3.70 kW
Mtr Rated Power 650.00
Tensão nominal 0.0
200.0V
T1-03 do motor Ajusta a tensão nominal em volts (V). ~
AC*1
Rated Voltage 255.0
Corrente nominal 1.75
T1-04 do motor Ajusta a corrente nominal em ampéres (A). ~ 14.00 A
Rated Current 35.0
Frequência base 0.0
Ajusta a frequência base do motor em Hertz
T1-05 do motor ~ 60.0 Hz
(Hz).
Rated Frequency 120.0
Número de polos 2
T1-06 do motor Ajusta o número de polos do motor ~ 4
Number of Poles 48
Velocidade base 0
Ajusta a velocidade base do motor em 1450
T1-07 do motor ~
rotações por minuto (RPM). RPM
Rated Speed 24000
Número de pulsos Ajusta o número de pulsos por revolução 0
T1-08 do motor (PPR) para o encoder (gerador de pulsos) ~ 600 PPR
PG Pulses / Rev sendo utilizado sem o fator de multiplicação. 60000
Mostrado quando a corrente dem carga é
Ajuste de corrente setada quando T1-01 é igual a zero, e N9-37 0.00
4.50
T1-09 sem carga é igual a zero (valor inicial). O parâmetro N9- ~
(E2-03)
No-Load Current 37 determina esse o ajuste sem carga está 35.00
ativo ou não.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 61
Código de Falhas do Inversor
Display do
Descrição Causa
Operador Digital
Falha de Aceleração (detectado somente
Accelerate O motor não acelerou no tempo especificado
no auto-ajuste rotacional)
BB Comando de acionamento bloqueado, externo no terminal de
Bloqueio externo
Base Block circuito de controle.
CALL
Aguardando transmissão da comunicação
(piscando)
serial
Com Call
CALL
Erro de transmissão SI-B Os dados de controle não foram recebidos adequadamente
Serial Com Call
ao energizar o Drive.
CE
(piscando)
Erro de Comunicação Modbus Os dados não estavam sendo recebidos corretamente por
modbus Com
mais de dois segundos.
Err
CE
Memobus Com Erro de transmissão
Err
Falha de controle
Um limite de torque foi atingido por 3
Os parâmetros do motor não estão ajustados corretamente
CF segundos ou mais durante a
Out of desaceleração por rampa no controle
Um comando rodar é acionado quando o motor estava em
Control vetorial de malha aberta 1
inércia
Ocorreu um erro no cálculo do
Gerenciador de velocidade no controle
vetorial de malha aberta 2
O conector do operador digital não está conectado
corretamente
Falha 1 de comunicação do operador
CPF00
Falha do circuito de controle do Drive
COM- A comunicação entre o operador digital e o
ERR(OP&INV) Drive não foi estabelicida após.5 segundos
Falha da RAM externa da CPU
energizado.
O circuito de controle está danificado
O conector do operador digital não está conectado
corretamente
O circuito de controle está danificado
Falha 2 de comunicação do operador
CPF01 Falha de transmissão do operador digital
COM- Após iniciada a comunicação com o
ERR(OP&INV) operador digital, a comunicação foi Transmissão entre o inversor e o operador digital foi
perdida por 2 segundos ou mais. estabelecida uma vez após a alimentação, mas depois a
transmissão falhou por mais de 2 segundos
Falha na verificação do elemento periférico MPU com falha
(em-linha).
CPF02 -
Falha do circuito de Baseblock
BB Circuit Err Placa de controle do inversor com defeito
CPF03
Falha da EEPROM Placa de controle do inversor com defeito.
EEPROM Error
CPF04
Internal Falha no conversor A/D interno da CPU Placa de controle do inversor com defeito
A/D Err
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 62
Display do
Descrição Causa
Operador Digital
CPF05
External Falha no conversor A/D externo da CPU
A/D Err
O cartão opcional não foi conectado corretamente.
CPF06
Falha de conexão do cartão opcional O Drive ou o cartão opcional estão danificados
Option error
O cartão opcional não está instalado corretamente
CPF07
Falha da RAM do bloco ASIC
RAM-Err
CPF08
Falha de Watchdog
WAT-Err
O circuito de controle está danificado
CPF09
Falha de diagnóstico CPU-ASIC
CPU-Err
CPF10
Falha da versão do ASIC
ASIC-Err
CPF20 O cartão opcional não foi conectado corretamente
Falha no conversor A/D no cartão de
Option A/D
referência de velocidade analógica
error Falha no conversor A/D do cartão opcional
CPF21
Falha de auto-diagnóstico do cartão
Option CPU
opcional
down
CPF22
Falha do código do cartão opcional Falha do cartão de comunicação opcional.
Option Type Err
CPF23
Option DPRAM Falha na DPRAM do cartão opcional
Err
Desvio de Velocidade Excessivo
DEV A carga está muito pesada
(piscando) O desvio de velocidade é maior que o
Speed Deviation ajuste em F1-10 por um tempo maior que Os tempos de aceleração e desaceleração estão muito curtos
o ajuste de F1-11.
A carga está travada
DEV
Desvio excessivo de velocidade Os ajustes em F1-10 e F1-11 não estão apropriados para a
Speed Deviation
aplicação
Há algum erro nos dados inseridos no auto-ajuste
Há algum erro na relação entre a saída do motor e a corrente
Data nominal
Falha de Dados do Motor
Invalid
Há algum erro entre a corrente sem carga e a corrente
nominal de entrada do motor (quando o aut-ajuste de
resistência entre fases é executado no controle vetorial).
E-10 Erro de CPU do SI-F/G Falha de conexão do operador digital
SI-F/G
CPU down Falha de operação do cartão SI-F/G Falha do circuito de controle do Drive
Erro de comunicação do SI-F/G
E-15
Um erro de comunicação foi detectado
SI-F/G -
quando um comando rodar ou uma
Com Err
referência de velocidade foi enviado pelo
cartão opcional SI-F/G.
EF
Comandos de Avante e reverso acionados Ambos os comandos rodar avante e reverso são acionados
(piscando)
junto . simultaneamente por 500ms ou mais
External Fault
EF0 Falha Externa do Cartão de Comunicação
Houve uma condição de EF0 (F6-03 = 3) e uma entrada de
Opt Externa Opcional
falha externa foi acionada pelo cartão opcional.
Flt (não sendo SI-K2)
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 63
Display do
Descrição Causa
Operador Digital
EF03
(piscando) Falha externa (terminal 3)
Ext Fault S3
EF03
Falha externa (terminal 3)
Ext Fault S3
EF04
(piscando) Falha externa (terminal 4)
Ext Fault S4
EF04
Ext Fault Falha externa (terminal 4)
S4
EF05
(piscando) Falha externa (terminal 5)
Ext Fault S5
EF05
Falha externa (terminal 5) Um entrada de falha externa foi acionada na entrada digital
Ext Fault S5
multi-função
EF06
(piscando) Falha externa (terminal 6)
Ext Fault S6
EF06
Falha externa (terminal 6)
Ext Fault S6
EF07
(piscando) Falha externa (terminal 7)
Ext Fault S7
EF07
Falha externa (terminal 7)
Ext Fault S7
EF08
(piscando) Falha externa (terminal 8)
Ext Fault S8
EF08
Falha externa (terminal 8)
Ext Fault S8
EF09
(piscando) Falha externa (terminal 9)
Ext Fault S9
EF09
Ext Fault Falha externa (terminal 9)
S9 Um entrada de falha externa foi acionada na entrada digital
EF10 multi-função
(piscando) Falha externa (terminal 10)
Ext Fault S10
EF10
Ext Fault Falha externa (terminal 10)
S10
EF11
(piscando) Falha externa (terminal 11)
Ext Fault S11
EF11
Falha externa (terminal 11)
Ext Fault S11 Um entrada de falha externa foi acionada na entrada digital
EF12 multi-função
(piscando) Falha externa (terminal 12)
Ext Fault S12
EF12
Falha externa (terminal 12)
Ext Fault S12
ERR
Os dados internos da EEPROM não conferem ao inicializar o
EEPROM R/W Erro na escrita de EEPROM (ERR)
parâmetro.
Err
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 64
Display do
Descrição Causa
Operador Digital
Perda de realimentação de PID
FBL
Houve uma detecção de perda de
(piscando)
realimentação de PID (b5-12 = 2) e a
Feed-back Loss
realimentação de PID < nível de detecção
(b5-13) pelo tempo de (b5-14). Um entrada de falha externa foi acionada na entrada digital
Perda de realimentação de PID multi-função.
FBL Houve uma detecção de perda de
Feedback Loss realimentação de PID (b5-12 = 2) e a
realimentação de PID < nível de detecção
(b5-13) pelo tempo de (b5-14).
Falha de fuga à terra Baixa isolação do motor, cabos em curto, cabos danificados
e/ou DCCT danificado
GF
A corrente do circuito de terra excedeu
Ground Fault
aproximadamente 50% da corrente A corrente de saída de terra do inversor excedeu 50% da
nominal do Drive corrente nominal do inversor
A corrente excede a corrente nominal do Motor
O sinal da corrente detectada está no sentido contrário ao que
I-det. Circuit Falha de Detecção de Corrente
deveria estar.
Alguma das fases U/TI, V/T2, e W/T3 estão abertas.
Leak
Falha de Indutância de Vazamento O auto-ajuste não foi completado no tempo determinado.
Inductance
A saída do inversor tem fase aberta.
Fase aberta na saída
Cabos de saída rompidos.
LF Ocorreu uma perda de fase na saída do
Cabos do motor rompidos.
Output Pha Drive.
Loss
Os terminais estão mau conectados.
Esta falha é detectada quando L8-07 = 1
(habilitado)
O motor utilizado tem capacidade menor que 5% da
capacidade máxima do Drive
Minor Fault Alarme Alguma falha secundária ocorreu durante o auto-ajuste (xxx)
Falha de Velocidade do Motor
A referência de torque estava muito alta(100%) durante a
Motor Speed (detectado somente no auto-ajuste rota
aceleração (para controle vetorial em malha aberta somente).
cional)
O auto-ajuste não foi completado no tempo determinado
No-Load
Falha de Corrente sem Carga
Current O resultado do auto-ajuste está fora da escala para os
parâmetros ajustados
OC
Sobrecorrente (OC) A corrente de saída do inversor excedeu o nível OC.
Overcurrent
Sobretemperatura do dissipador
OH
A temperatura do dissipador do Drive
(piscando)
excede o ajuste de L8-02 ou 105°C Os ventiladores do Drive estão parados
Heat- sink
Over-temp
Ventilador interno parados
(18.5 kW ou maior)
OH
A temperatura do dissipador do transistor excedeu o valor
Heatsink Over Sobreaquecimento do dissipador (OH1)
permitido.
tmp
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 65
Display do
Descrição Causa
Operador Digital
Sobretemperatura do dissipador
OH
(OH1)
A temperatura do dissipador do Drive A temperatura ambiente está muito alta
Heatsnk
excede o ajuste de L8-02 ou 105°C
Overtemp
Há alguma fonte de calor próxima ao Drive
(Heat-sink
Ventilador interno parados
MAX Temp)
(18.5 kW ou maior)
Pré-alarme de sobreaquecimento do Drive
OH2
(piscando) Um sinal de alarme OH2 foi acionado em -
Over Heat 2 um terminal de entrada multi-função (S3
a S12).
Sobreaquecimento do Motor
OH3
(piscando)
“E” foi programado em H3-09 e o
Motor
termistor do motor excedeu o nível de
Over-heat 1
detecção do alarme.
Alarme de sobretemperatura do motor 1
OH3
Motor Sobre-temperatura do motor
O Drive irá parar ou continuar operando de
Overheat 1
acordo com L1-03
Alarme de sobretemperatura do
OH4 motor 1
Motor
Overheat 2 O Drive irá parar ou continuar operando de
acordo com L1-04
Sobrecarga do motor A carga está muito pesada.
OL1
Motor A função de sobrecarga do motor opera Os tempos de acele./desac. estão muito curtos
Overloaded baseada no valor da proteção térmica
eletrônica interna do Drive A tensão do padrão V/F está incorreta para a aplicação
Sobrecarga do Drive A corrente nominal do motor (E2-01) está incorreta.
OL2
Inv Over- A função de sobrecarga do motor opera A saída do inversor excedeu o nível de sobrecarga do motor.
loaded baseada no valor da proteção térmica
eletrônica interna do Drive A capacidade do Drive é muito pequena.
OL3 Sobretorque 1
(piscando)
Over-torque Corrente de saída do Drive > L6-02 pelo
Det 1 tempo ajustado em L6-03.
-
Detecção de sobretorque 1.
OL3
Overtorque
Corrente de saída do Drive > L6-02 por um
Det 1
tempo maior que L6-03
OL4 Sobretorque 2
(piscando)
Over-torque Corrente de saída do Drive > L6-05 pelo
Det 2 tempo ajustado em L6-06
-
Detecção de sobretorque 2
OL4
Overtorque
Corrente de saída do Drive > L6-05 por um
Det 2
tempo maior que L6-06.
Sobrecarga da HSB
OL7
A inércia da carga é muito alta
HSB-OL A frequência de saída permanece
constante por um tempo maior que n3-04
OPE01
Erro de ajuste de kVA (OPE01) Erro de ajuste de kVA.
kVA Selection
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 66
Display do
Descrição Causa
Operador Digital
OPE02
Ajuste de parâmetro fora da faixa (OPE02) Valor de parâmetro está fora de escala.
Limit
OPE03 Erro no ajuste de entrada multi-função Os ajustes de entrada de H1-01 até H1-06 não estão em
Terminal (OPE03) ordem ou, valores diferentes de “F” estão se sobrepondo.
OPE10 Os dados V/f são tais que a seguinte equação não é satisfeita:
Erro de ajuste de V/f (E1-04 até E1-10)
V/f E1-04 E1-06 > E1-07 E1-09
Quando um dos seguintes erros de ajuste ocorre:
Limite superior de freq. da portadora (C6-01) >5kHz e limite
OPE11
Erro de ajuste de parâmetro inferior de freq. da portadora (C6-02) < 5kHz.
FC/ On-Dly
Ganho proporcional de freq. da portadora (C6-03) > 6 e (C6-
01) < (C6-02).
Falha de conexão do operador digital
OPR
Oper Dis- Detectada quando o operador digital é -
connect removido, e o comando rodar é acionado
pelo operador digital (b1-02 = 0).
OS
(piscando) Excesso de velocidade (OS) A velocidade do motor excedeu seu nível máximo
Over-speed Det
Sobrevelocidade
Ocorrência de over-shooting ou under-shooting
OS A realimentação de velocidade do motor
A referência está muito alta
Overspeed Det (U1-05) excede o valor ajustado em F1-08
por um tempo maior que o
Os ajustes de F1-08 e F1-09 não estão adequados
ajustado em F1-09
Sobretensão no Link CC
OV
(piscando) A tensão no link CC excedeu o limite: A tensão de alimentação está muito alta.
DC Bus Overvolt 200-240 V: Aprox. 400 V
380-480 V: Aprox. 800 V
Sobretensão do barramento CC
O tempo de desaceleração está muito curto e a energia
OV
A tensão do barramento CC excedeu o regenerativa é muito alta
DC Bus
ponto limite:
Fuse Open
208-240Vca: o ponto é 410Vcc Alta tensão em R/L1, S/L2 e T/L3
480Vca: o ponto é 820Vcc
A tensão de corrente direta do circuito principal excedeu o
nível OV.
OV
Sobretensão (OV)
Overvoltage Nível de detecção:
Classe 230 V: Aprox. 400 V
Classe 460 V: Aprox. 800 V
Curto circuito ou fuga à terra ocorreu na saída do Drive (pode
ser causado po fases de saída em curto, motor em curto, etc).
Sobrecorrente.
Rotor travado, carga muito pesada, tempos de acele./desac.
OvC muito curtos
A corrente de saída do Drive excede o
Over Current
nível de detecção (aproximadamente
Contator chaveado na saída do Drive
200% da corrente de saída do Drive)
Motor especial ou motor com corrente nominal maior que a
corrente nominal do Drive
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 67
Display do
Descrição Causa
Operador Digital
Ocorreu uma falta de fase na alimentação
Perda de fase na entrada Ocorreu uma queda momentânea de energia
Houve uma perda de fase na entrada ou Fiação de entrada desconectada ou com mau contato
desbalanceamento muito grande na
PF
entrada (não considerando durante Variação de tensão excessiva na alimentação.
Input Pha Loss
regeneração).
Desbalanceamento entre as fases de entrada
Detectada quando
L8-05 = 1 (habilitado) A alimentação do inversor tem fase aberta.
Desequilíbrio na tensão de entrada
PG Desconetado
PGO
A fiação do PG está rompida
(piscando) Detectado quando os pulsos de encoder
PG Open (PG) não são recebidos quando há
Fiação do PG incorreta
frequência na saída.
Encoder desconectado
O encoder não está sendo alimentado
PGO
Detectado quando não são recebidos
PG Open A linha PG está rompida
pulsos do encoder (PG) quando há
frequência de saída.
O fusível do barramento CC queimou.
Os transistores de saída danificaram.
Fusível do barramento CC aberto
PUF
Main IBGT Curto-circuito do(s) transistor(es) de saída ou terminais.
Detectado se o fusível do barramento CC
Fuse Blown Verifique se há curto circuito entre os seguintes terminais:
está aberto
B1 ((+)3) - U/T1, V/T2, W/T3
(-) - U/T1, V/T2, W/T3
Sobreaquecimento da unidade de
resistência de frenagem
A temp. da unidade de resistência de frenagem excedeu o
RH
valor permitido (protege somente o tipo embutido)
DynBrk Resistor de frenagem dinâmica
O tempo de desaceleração está muito curto e a energia
Resistor
regenerativa é muito.alta.
A proteção do resistor montado no
dissipador é ativa quando L8-01 = 1.
Alarme de Ajuste da Corrente Nominal*
Rated FLA Alm A corrente nominal é muito alta.
* Visualizados depois que o auto-ajuste foi
completado.
Falha no transistor de frenagem
RR
Transistor de frenagem dinâmica
DynBrk Transistor de frenagem com defeito.
Transistr
Falha do transistor de frenagem interno ao
inversor.
Rated Slip Falha de Escorregamento Nominal -
Resistance Falha de Resistência Fase-a-Fase -
Os resultados do auto-ajuste excederam a faixa de ajuste,
Falha de Saturação do Motor(detectado
Saturation então foi adotado um ajuste temporário para o coeficiente de
somente no autoajuste rotacional).*
saturação do motor.
SC
Curto-circuito da carga (SC) A saída do inversor (carga) está curtocircuitada.
Short Circuit
A tecla STOP foi pressionada durante o auto-ajuste, e esse foi
STOP key Tecla STOP Pressionada
interrompido
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 68
Display do
Descrição Causa
Operador Digital
Falha de zero servo
SVE O limite de torque está muito baixo
Zero Servo
A posição do motor foi deslocada durante
Fault O torque da carga está muito alto
a operação de zero servo
UL3
(piscando)
Subtorque 1
Under- torq
Corrente de saída do Drive < L6-02 por um tempo maior que
Det 1
L6-03
UL3
Undertorq Detecção de subtorque 1
Det 1
UL4
(piscando)
Subtorque 2
Under-torq
Corrente de saída do Drive < L6-05 por um tempo maior que
Det 2
L6-06
UL4
Undertorq Detecção de subtorque 2
Det 2
As seguintes condições ocorreram quando o comando rodar
estava desacionado:
UV
A tensão do link CC ficou abaixo do valor ajustado em L2-05.
(piscando)
Suntensão no Link CC
DC Bus
A tensão do controle ficou abaixo do nível mínimo
Unde volt
Contator de detecção de tensão aberto na entrada
A tensão CC do circuito principal caiu abaixo do nível PUV.
UV
Perda de força momentânea A fonte do controle caiu abaixo do nível CUV.
Under Voltage
O contator de pré-carga abriu.
Tensão baixa no circuito CC principal durante o
Tensão baixa no circuito principal (PUV) funcionamento.
Subtensão no barramento CC Nível de detecção:
Classe 230 V:
208-240Vca: ponto de detecção de fábrica Aprox. 190 V ou menos
≤ 190Vcc Classe 460 V:
UV1
Aprox. 380 V ou menos
DC Bus
480Vca: ponto de detecção de fábrica ≤
Undervolt
380Vcc Ocorreu uma falta de fase na alimentação.
O ponto de detcção é ajustável em L2-05 Ocorreu uma queda momentânea de energia
Detectado quando a tensão no barramento Fiação de entrada desconectada ou com mau contato.
CC é ≤ L2-05
Variação de tensão excessiva na alimentação
Subtensão na alimentação do controle
UV2
Subtensão no circuito de controle
CTL PS Tensão baixa no circuito de controle durante o funcionamento.
enquanto rodando
Undervolt
Tensão baixa no circuito de controle(CUV)
UV3 Falha do circuito de pré-carga
MC O contator de pré-carga abriu durante o -
Answer back funcionamento do Drive
vfo A referência de torque excede 100%, e a corrente sem carga
Alarme de Ajuste da Curva V/f
V/f Over Setting excede 70% durante o auto-ajuste
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 69
Falhas exclusivas do L7 - 1
Display do
Função Operador Descrição Causa Provável Ação Corretiva
Digital
PRE o3-01 está ajustado para 1
Proteção de escrita Ajuste o3-02 para 1 para habilitar a escrita
Read READ para escrita quando essa está
do operador digital de parâmetros no operador.digital.
IMPOSSIBLE protegida (o3-02 =0)
O arquivo de leitura de dados
Repita o procedimento de leitura
IFE do Drive tem um tamanho
Leitura de dados Verifique o cabo do operador digital.dados
Read READ DATA diferente, indicando.
inapropriada corrompidos
ERROR A escrita de dados está
Substitua o operador digital
incorreta.
Falha na tentativa de escrita Ocorreu uma subtensão
RDE Status de escrita
Read de dados do Drive para a Repita a leitura
DATA ERROR inapropriada
EEPROM do operador. Digital Substitua o operador digital
Utilize o operador digital em um mesmo
Read _ _ _ tipo de Drive e de mesma versão de
software.
A capacidade do drive é
VAE
Capacidade do diferente do dado armazenado Utilize o operador digital em um Drive de
Copy INV. KVA
Drive diferente da capacidade do Drive mesma capacidade.
UNMATCH
original
O método de controle do Drive
CRE e o dado armazenado do
Método de controle Use a função copy para um mesmo tipo de
Copy CONTROL método de controle no
diferente metodo de controle
UNMATCH operador digital são
diferentes.
Um parâmetro escrito no Drive
CYE é diferente do dado
Copy Erro de cópia Repita o procedimento de cópia
COPY ERROR armazenado no operador
digital.
Após completada a função
CSE CÓPIA, o checksum de dados
Copy SUM CHECK Erro de checksum do Drive é diferente do Repita o procedimento de cópia
ERROR checksum do dado no
operador digital.
VYE
Os dados do operador digital Repita o procedimento de cópia e execute
Verify VERIFY Erro de verificação
e do Drive são diferentes. a verificação novamente.
ERROR
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Treinamento Básico Série
MITS-00X 002
ITS/XX
Excel e Ex800
VVVF Índice: 00 Pág: X 70
Falhas exclusivas do L7 - 2
Ajustes Incorretos
Display Descrição
OPE01 Erro de Ajuste da
O ajuste da capacidade do Drive não corresponde ao equipamento.
kVA Selection Capacidade do Drive
OPE02 Ajuste de Parâmetro O ajuste do parâmetro está fora da faixa permitida. Quando este erro é visualizado,
Limit Fora de Escala pressione a tecla ENTER para visualizar U1-34 (parâmetro da falha OPE).
Um dos seguintes ajustes foram setados em uma entrada digital multifunção (H1-
01 a H1-10):
Um mesmo ajuste foi feito para duas ou mais entradas multifunção.
An up or down command was selected independently. (They must be used
together.)
Erro de Seleção de Comando up/down (10 e 11) e Retenção das Rampas Acel/Decel (A) foram
OPE03
Entrada Digital selecionados ao mesmo tempo.
Terminal
Multifunção Busca de velocidade 1 (61, frequência máxima de saída) e busca de velocidade 2
(62, frequência ajustada) foram selecionadas ao mesmo tempo.
Comandos up/down (10 e 11) foram selecionados enquanto o controle PID (b5-01)
estava habilitado.
Referência de velocidade positiva e negativa foram ajustadas ao mesmo tempo.
O comando de parada de emergência NA e NF foi ajustado ao mesmo tempo.
OPE05
Erro de Seleção do Um cartão opcional foi programado como fonte da referência de freqüência (b1-01
Sequence
Comando Rodar = 3), mas o cartão opcional não foi conectado.
Select
OPE06
Erro de Seleção do Controle V/f com realimentação de encoder foi ajustado (A1-02 = 1), mas o cartão
PG Opt
Método de Controle de encoder não foi conectado.
Missing
O mesmo ajuste foi selecionado em uma entrada analógica e na função de PID
H3-09 = B e H6-01 = 1
OPE07 Erro de Seleção de
H3-09 = C e H6-01 = 2
Analog Entrada Analógica
b1-01 (seleção da referência) é ajustado para 4 (entrada de pulso) a
Selection Multi função
H6-01 (função da entrada de trem de pulso) está ajustado para um valor diferente
de 0 (referência de frequência).
Um ajuste foi feito para uma função que não está disponível no método de controle
atual.
Erro de Seleção de Exemplo: uma função somente disponível no controle vetorial de malha aberta foi
OPE08
Função selecionada no controle (V/f) escalar.
Quando este erro é visualizado, pressione a tecla ENTER para visualizar U1-34
(parâmetro da falha OPE).
Os seguintes ajustes foram feitos ao mesmo tempo:
Erro de Ajuste do b5-01 (seleção do controle PID) foi ajustado para um valor diferente de 0
OPE09 Con- b5-15 (nível para início da função sleep do PID) foi ajustado para um valor diferente
trole PID de 0
b1-03 (seleção do método de parada) foi ajustado para 2 ou 3.
Os parametros E1-04, E1-06, E1-07, e E1-09 não satisfazem as seguintes
OPE10 Erro de Ajuste de
condições:
V/f Ptrn Parâmetros da Curva
E1-04 (FMÁX) ≥ E1-06 (FA) > E1-07 (FB) ≥ E1-09 (FMÍN)
Settingf V/
E3-02 (FMÁX) ≥ E3-04 (FA) > E3-05 (FB) ≥ E3-07 (FMÍN)
Um dos seguintes erros de ajuste ocorreu:
C6-05 (ganho da frequência portadora) > 6, o limite inferior da frequência
OPE11
Erro de Ajuste de portadora (C6-04) > ganho da frequência portadora (C6-05)
Carr Freq/
Parâmetros Erro de limite inferior e superior em: C6-03 a 05
On-Delay
C6-01 é 0 e C6-02 é 2 para E.
C6-01 é 1 e C6-02 é 7 para E.
ERR Ocorreu um erro de verificação durante escrita na EEPROM.
Erro de Escrita na
EEPROM Tente desenergizar/energizar o Drive novamente
EEPROM
R/W Err Tente ajustar os parâmetros novamente.
Revisor: Willian Francez Aprovador:
Copyright © 2015 ThyssenKrupp Elevadores S.A
Proibida a reprodução, divulgação e utilização sem consentimento prévio da ThyssenKrupp Elevadores S.A
Você também pode gostar
- ATC - A.04.10 (Instalação RBI)Documento22 páginasATC - A.04.10 (Instalação RBI)Lucas AndradeAinda não há avaliações
- CTI - 182 Parametros Expert XXIDocumento2 páginasCTI - 182 Parametros Expert XXIDrteslaAinda não há avaliações
- Addtech MC 40Documento15 páginasAddtech MC 40ElenilzaSantosAinda não há avaliações
- Manual Leitura de Diagramas ElétricosDocumento36 páginasManual Leitura de Diagramas ElétricosFranciellyAinda não há avaliações
- Ajuste Do Freio para Máquinas 140vatDocumento2 páginasAjuste Do Freio para Máquinas 140vatPaulo FonsecaAinda não há avaliações
- Linha de Segurança Gen 2 ComfortDocumento1 páginaLinha de Segurança Gen 2 ComfortDouglas Da Silva RibeiroAinda não há avaliações
- 129 Maquinas de Tracao PTDocumento2 páginas129 Maquinas de Tracao PTAliRouyouAinda não há avaliações
- Manual Relogio TKEDocumento7 páginasManual Relogio TKEViniciusAinda não há avaliações
- CDI-00-yaskawa L1000Documento16 páginasCDI-00-yaskawa L1000Henrique MeloAinda não há avaliações
- MI - 002 Passar Cabos de TraçãoDocumento6 páginasMI - 002 Passar Cabos de TraçãoRenato FreitasAinda não há avaliações
- Addtech MCX Versão 1.2Documento16 páginasAddtech MCX Versão 1.2Nixon Erick100% (1)
- Ejercicios NumerosDocumento35 páginasEjercicios NumerosambarAinda não há avaliações
- Apostila Ifl 750 Ifl VVVF r01 PDFDocumento53 páginasApostila Ifl 750 Ifl VVVF r01 PDFaldjan_557541154Ainda não há avaliações
- Assim Deus Falou Aos HomensDocumento203 páginasAssim Deus Falou Aos HomensFelipe EspinolaAinda não há avaliações
- Addetech Eletrico MCX - VF 220V Rev 01 PDFDocumento19 páginasAddetech Eletrico MCX - VF 220V Rev 01 PDFCaroline Coelher100% (1)
- Repique TrincoDocumento4 páginasRepique TrincoJorge Evaristo100% (1)
- Manual MCX HD - Apresentação - Rev 1.0Documento44 páginasManual MCX HD - Apresentação - Rev 1.0DDavidd CCunhaaAinda não há avaliações
- Tabela Referencia Rápida Falhas 008938 V1Documento2 páginasTabela Referencia Rápida Falhas 008938 V1Thiago Ferraz Da Silva100% (1)
- (CdmsLife - Org) .Proteção de TransformadorDocumento153 páginas(CdmsLife - Org) .Proteção de TransformadorElves TiagoAinda não há avaliações
- 9.1 - Apostila Do Aluno - ADV-DP LCB2 RevDocumento29 páginas9.1 - Apostila Do Aluno - ADV-DP LCB2 RevMiura100% (1)
- Escadas e Esteiras Rolantes OtisDocumento10 páginasEscadas e Esteiras Rolantes OtisRodrigoAinda não há avaliações
- 014 ACBB CC - MSP 2 - O Sistema RototrolDocumento17 páginas014 ACBB CC - MSP 2 - O Sistema RototrolWalter Ariel Rodriguez GonzalezAinda não há avaliações
- Schindler Impulsomatic Mobile Manual Prático PDFDocumento120 páginasSchindler Impulsomatic Mobile Manual Prático PDFh6nvqr7xycAinda não há avaliações
- 3Z0006EL Manual Da MGRXDocumento14 páginas3Z0006EL Manual Da MGRXWalter Ariel Rodriguez GonzalezAinda não há avaliações
- 3Z0006JN-00 - Manual Do Dispositivo Pesador de Carga SerialDocumento8 páginas3Z0006JN-00 - Manual Do Dispositivo Pesador de Carga SerialDouglas SalazarAinda não há avaliações
- Comparativo Entre Nomenclaturas Da Thyssenkruppotisatlasschindl PDFDocumento4 páginasComparativo Entre Nomenclaturas Da Thyssenkruppotisatlasschindl PDFRuth Souza BritoAinda não há avaliações
- Fermator V1Documento4 páginasFermator V1Alberto100% (1)
- 3z.0006.Xh - Lista de Erros e Advertências Da MCPDocumento8 páginas3z.0006.Xh - Lista de Erros e Advertências Da MCPAllan AzevedoAinda não há avaliações
- 013 ACBB CC - MSP1 - Descrição GeralDocumento16 páginas013 ACBB CC - MSP1 - Descrição GeralWalter Ariel Rodriguez GonzalezAinda não há avaliações
- 3Z0006ZF-00 - Manual de Instalação Synergy OneDocumento25 páginas3Z0006ZF-00 - Manual de Instalação Synergy OnedouglasrufinorosalinoAinda não há avaliações
- Maquina Kone MR-12Documento25 páginasMaquina Kone MR-12André Bastos100% (5)
- Diagrama Eletrico CV NMT 16 Ortobras-1Documento12 páginasDiagrama Eletrico CV NMT 16 Ortobras-1Vinicius100% (1)
- OTIS Completo Do ExcelDocumento74 páginasOTIS Completo Do Excelluishenrimoreirasilva moreirasilvaAinda não há avaliações
- Comando BXDocumento6 páginasComando BXLUCIANO MeloAinda não há avaliações
- Manual Pesador de Carga PDFDocumento8 páginasManual Pesador de Carga PDFViniciusAinda não há avaliações
- Prova Freios de Pequeno PorteDocumento3 páginasProva Freios de Pequeno PorteAndre Louis GrangeonAinda não há avaliações
- ITS-1311203 - 3 Manual V3F-10 Rev03Documento72 páginasITS-1311203 - 3 Manual V3F-10 Rev03Flavio Brito100% (2)
- CMG PDFDocumento1 páginaCMG PDFAngelo TeixeiraAinda não há avaliações
- Kone TMS50e PortuguesDocumento64 páginasKone TMS50e PortuguesBeltran HéctorAinda não há avaliações
- Co 3Documento10 páginasCo 3DDavidd CCunhaaAinda não há avaliações
- Carnes e Produtos CárneosDocumento16 páginasCarnes e Produtos CárneosDanilo OzorioAinda não há avaliações
- Apresentação Pesador de Carga Serial DTEC-Ind1Documento31 páginasApresentação Pesador de Carga Serial DTEC-Ind1minuevacontraAinda não há avaliações
- 3Z0006JC - Ajuste Do Freio Máquina GLM-20, 25 e 30Documento7 páginas3Z0006JC - Ajuste Do Freio Máquina GLM-20, 25 e 30Douglas SalazarAinda não há avaliações
- Guiadobuscador Acre v1Documento35 páginasGuiadobuscador Acre v1Guilherme ValleAinda não há avaliações
- LCB2 CFW11 Flex Drive Com Etsc Baa21235jDocumento37 páginasLCB2 CFW11 Flex Drive Com Etsc Baa21235jErick de Souza0% (1)
- Todos Exames de FisicaDocumento74 páginasTodos Exames de FisicaSidónio Eusébio100% (2)
- Cambio LCB-I Por LCB-II-1Documento8 páginasCambio LCB-I Por LCB-II-1jaime flores zaballaAinda não há avaliações
- ProcedimentoparaTestedaUnidadeIGBT (1) 1Documento13 páginasProcedimentoparaTestedaUnidadeIGBT (1) 1Matheus ThomazAinda não há avaliações
- Apostila Tecnologias Infolev Aplicacoes Funcionamento Diagnósticos de Falhas e Solucoes R00-CompactadoDocumento38 páginasApostila Tecnologias Infolev Aplicacoes Funcionamento Diagnósticos de Falhas e Solucoes R00-CompactadoPedro Reis100% (1)
- Esq Psi-05 Com AddvoxDocumento5 páginasEsq Psi-05 Com Addvoxjose100% (1)
- MCP8 - Telas Do TLSDocumento1 páginaMCP8 - Telas Do TLSEdson Alessandro CaramiteAinda não há avaliações
- AG3 - Geografia - 3º Ano EF - 2021Documento5 páginasAG3 - Geografia - 3º Ano EF - 2021Brenno cartaxoAinda não há avaliações
- Mundo Real e o Mundo PercebidoDocumento20 páginasMundo Real e o Mundo PercebidoEduardo S. BigatonAinda não há avaliações
- IT 1207 - Melhoria MTBC ExcelDocumento35 páginasIT 1207 - Melhoria MTBC Excelthiago candido100% (1)
- Apostila Miconic LX FA-1Documento62 páginasApostila Miconic LX FA-1twiAinda não há avaliações
- J101 Como Fazer PDFDocumento40 páginasJ101 Como Fazer PDFJair SousaAinda não há avaliações
- Jornalismo Investigativo Uma Análise Do Programa Profissão RepórterDocumento66 páginasJornalismo Investigativo Uma Análise Do Programa Profissão RepórterTadeu GoulartAinda não há avaliações
- STK 2259Documento50 páginasSTK 2259TafarellOliveiraAinda não há avaliações
- Catálogo 2017 - New Parts ElevatorDocumento122 páginasCatálogo 2017 - New Parts ElevatorMarco AntonioAinda não há avaliações
- Back Mod 1 (1 A 7) - 1Documento10 páginasBack Mod 1 (1 A 7) - 1Yasmin Quintela100% (1)
- 3W.0503.FD Ac2 MCP3-1-1Documento13 páginas3W.0503.FD Ac2 MCP3-1-1ElenilzaSantosAinda não há avaliações
- Infolev Ifl 750Documento54 páginasInfolev Ifl 750Junior Braga100% (1)
- Smart Configuração e FalhasDocumento41 páginasSmart Configuração e FalhasRellim AugustoAinda não há avaliações
- Freio Duplo MeacDocumento15 páginasFreio Duplo MeacBruno Vanzella MoreiraAinda não há avaliações
- INV Porta CFW10-1 PDFDocumento1 páginaINV Porta CFW10-1 PDFAngelo TeixeiraAinda não há avaliações
- Inversor Yaskawa G5 Inversor Yaskawa L7Documento7 páginasInversor Yaskawa G5 Inversor Yaskawa L7Felipe BritoAinda não há avaliações
- Manual HTS Elevadores PDFDocumento50 páginasManual HTS Elevadores PDFAlan Alencar50% (2)
- xATS MS 11112A2 - 2 Ex800 VVVFDocumento93 páginasxATS MS 11112A2 - 2 Ex800 VVVFFlavio BritoAinda não há avaliações
- Aula - Gestão de RiscosDocumento76 páginasAula - Gestão de RiscosmoraesandressadriveAinda não há avaliações
- O Racionalismo CartesianoDocumento3 páginasO Racionalismo CartesianoisabelmouradAinda não há avaliações
- PDITS Chapada DiamantinaDocumento489 páginasPDITS Chapada DiamantinaRodrigo Araujo100% (1)
- Ma Lingua Portuguesa 8-Lowres+155Documento238 páginasMa Lingua Portuguesa 8-Lowres+155maurocadoshAinda não há avaliações
- 1 PBDocumento31 páginas1 PBmaianeAinda não há avaliações
- Histologia: Tecido ConjuntivoDocumento5 páginasHistologia: Tecido ConjuntivoCamilla PereiraAinda não há avaliações
- Como Saber o CaminhoDocumento2 páginasComo Saber o CaminhomauricioAinda não há avaliações
- Exercícios - Estrutura de DecisãoDocumento3 páginasExercícios - Estrutura de DecisãoDaniele VianaAinda não há avaliações
- Visões - de - Ciências - e - Sobre - Cientistas - Entre - Estudantes - Do - Ensino - MédioDocumento8 páginasVisões - de - Ciências - e - Sobre - Cientistas - Entre - Estudantes - Do - Ensino - MédioPedro JuniorAinda não há avaliações
- Reaproveitamento Do Óleo Vegetal para A Produção de Sabão Artesanal - 201135Documento2 páginasReaproveitamento Do Óleo Vegetal para A Produção de Sabão Artesanal - 201135biologiaufbaAinda não há avaliações
- MartaMega InterfacesDocumento24 páginasMartaMega InterfacesMarta MegaAinda não há avaliações
- NeurociênciasDocumento4 páginasNeurociênciasMarina TostesAinda não há avaliações
- Guia Objetivo de Antimicrobianos 2016Documento29 páginasGuia Objetivo de Antimicrobianos 2016Begnailson RibeiroAinda não há avaliações
- Catalogo Completo Bermo PDFDocumento260 páginasCatalogo Completo Bermo PDFgabao123Ainda não há avaliações
- Orçamento Centro de Tradições Gauchas Estancia Da Fronteira Palma SolaDocumento3 páginasOrçamento Centro de Tradições Gauchas Estancia Da Fronteira Palma SolaagilizadespachantesloAinda não há avaliações
- Portaria Inmetro Nº 341Documento23 páginasPortaria Inmetro Nº 341Mateus S.D.Ainda não há avaliações
- Demografia Federada 2006-2007Documento328 páginasDemografia Federada 2006-2007Direção Regional de Juventude e DesportoAinda não há avaliações
- Estilo e Som No AudiovidualDocumento268 páginasEstilo e Som No AudiovidualTasha BallardAinda não há avaliações
- Tegula Guia de SistemasDocumento16 páginasTegula Guia de Sistemaslfrn2004Ainda não há avaliações
- 12 - A Ceia Do SenhorDocumento7 páginas12 - A Ceia Do SenhorEverson CunhaAinda não há avaliações
- 46 51 Signos Chineses PDFDocumento6 páginas46 51 Signos Chineses PDFPatrícia TGAinda não há avaliações
- Article 232142 1 10 20210809Documento16 páginasArticle 232142 1 10 20210809Samantha TalitileneAinda não há avaliações