LISTA DE ERROS KUKA-pt
Enviado por
jonnesLISTA DE ERROS KUKA-pt
Enviado por
jonnesSOFTWARE
KR C...
Mensagens de sistema
KUKA System Software (KSS)
Situação: 17/10/2005 Versão: 01
Systemmeldungen 05.03.01 pt 1 de 322
e Copyright KUKA Roboter GmbH
Este documento ou extratos do mesmo não podem ser reproduzidos ou disponibilizados a terceiros sem autorização expressa do editor.
Outras funções de comando não descritas nesta documentação poderão ser postas em prática. No entanto, não está previsto qualquer tipo
de reclamação quanto a estas funções em caso de nova remessa ou de serviço.
Verificámos que o conteúdo do prospeto é compatível com o software e com o hardware descrito. Porém, não são de excluir exeções, de forma
a que não nos responsabilizamos pela total compatibilidade. Os dados contidos neste prospeto serão verificados regulamente e as correções
necessárias serão incluídas nas próximas edições.
Reservado o direito a alterações técnicas que não influenciem o funcionamento.
2 de 322 Systemmeldungen 05.03.01 pt
Índice
1 Mensagens de sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Systemmeldungen 05.03.01 pt 3 de 322
Mensagens de sistema
1 Mensagens de sistema
Este resumo em forma de tabela fornece uma visão geral sobre as mensagens de sistema
que podem ser visualizadas na janela de mensagens do painel de operação. Uma
mensagem de sistema é composta pelas seguintes informações parciais:
Grupo de mensagens
Hora da mensagem
Número da mensagem
Emissor da mensagem
Texto da mensagem
C... Hora Nº Emissor Mensagem
12:18:02 1342 KCP ERRO CAMPO DE TRABALHO
12:18:03 1376 KCP COMANDOS ATIVOS BLOQUEADOS
Grupo de mensagens
Por grupo de mensagens entende--se a categoria, à qual a mensagem de sistema pertence.
Ele é representado por um pequeno símbolo.
Mensagem de informação
Contém informações ou remete a uma ação de operação, um erro de programação
ou de operação. Uma mensagem de informação possui apenas um caráter
informativo e não interrompe a execução do programa.
Mensagem de estado
Esta sinaliza o estado do sistema. Uma mensagem de estado também possui
apenas um caráter informativo, porém sob determinadas condições pode
interromper um programa do usuário. No momento em que deixa de existir o estado
que a provocou (a causa da mensagem), a mensagem de estado é apagada
automaticamente.
Mensagem de confirmação
Aparece frequentemente após uma mensagem de estado (p.ex., “PARADA DE
EMERGÊNCIA”) e deve ser confirmada através de um softkey. Uma mensagem de
confirmação pode interromper um programa do usuário ou impedir o modo manual.
Ela indica uma falha na execução do programa.
Mensagem de diálogo
Esta deve ser respondida pelo operador através de um softkey. Uma mensagem
de diálogo pára um programa em execução. Após pressionar uma das opções de
softkey oferecida, ela é automaticamente apagada. Em seguida o programa
continua.
4 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Hora da mensagem
A hora da mensagem informa o hora no sistema, na qual a mensagem foi
gerada.
Número da mensagem
Com base do número da mensagem você pode rapidamente localizar, na
lista de mensagens de sistema, o respectivo efeito, a causa e as medidas
disponíveis.
Emissor da mensagem
Nesta coluna é visualizado o módulo responsável pela mensagem de
sistema.
Texto da mensagem
Neste local a mensagem de sistema existente é descrita detalhadamente.
Observe com atenção:
O modo mais simples de localizar uma mensagem de sistema é através do seu número de
mensagem. Para isso todas as mensagens estão organizadas em forma de tabela:
Número da mensagem Tipo da mensagem Texto da mensagem
1 PARADA DE EMERGÊNCIA
Causa Descreve a causa da mensagem de sistema existente.
Descreve o comportamento da unidade de comando
Efeito quando da ocorrência da respectiva mensagem de
sistema.
Solução Descreve a(s) medida(s) para a solução do problema.
As linhas de tabela são listadas somente se for necessário.
Marcadores de espaço, como por exemplo “< %1 >” são substituídos por um valor
correspondente quando da emissão da mensagem.
Systemmeldungen 05.03.01 pt 5 de 322
Mensagens de sistema
1 PARADA DE EMERGÊNCIA
Botão PARADA DE EMERGÊNCIA pressionado.
Causa Circuito de PARAGEM DE EMERGÊNCIA interrompido.
Parada de emergência disparada pelo programa.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Destravar botão PARADA DE EMERGÊNCIA.
Verificar o botão PARADA DE EMERGÊNCIA e o circuito de parada de
Solução
emergência.
Eliminar a falha notificada e confirmar.
2 Erro interno
Causa Teste interno do software KRC.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
3 LIMITE DE MENSAGENS ULTRAPASSADO
A memória de mensagens que contém as atuais mensagens existentes
Causa (mensagens de confirmação e de estado), está esgotada em determi-
nado limite.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar as falhas notificadas e confirmar.
4 MUDAR BATERIA <Número do módulo de potência>
Causa A tensão da bateria compensadora está muito baixa.
No próximo desligamento da unidade de comando, os dados do robô a
Efeito
serem salvos não poderão ser gravados por completo no disco rígido.
Solução Trocar a bateria.
6 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
5 FUNCAO <KCP ou CMR> ERRADA
Causa KCP defeituoso.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Trocar o KCP.
6 FALHA DE TRANSMISSÃO <KCP ou CMR>
Causa Falha de conexão para o KCP.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o cabo do KCP.
7 Carregador E/S não está pronto <Número do driver> <0>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
8 TEMPO DO SISTEMA INVALIDO
Após “TIME_HW_FAILURE” a hora do sistema torna--se inválida e foi
Causa
descrita com o valor inicial.
Efeito A hora do sistema foi inicializada com 01.01.93 00:00:00,00.
Solução Atualizar a hora do sistema por meio do formulário “syszeit”.
9 Temperatura excessiva MFC
Causa Temperatura excessiva MFC
Efeito Parada sobre a trajetória.
Verificar o ventilador no armário de comando.
Solução
Eventualmente trocar o. MFC.
Systemmeldungen 05.03.01 pt 7 de 322
Mensagens de sistema
10 ERRO ... NAS SAÍDAS DIGITAIS
Causa Curto--circuito nas saídas 1 a 8 ou curto--circuito nas saídas 9 a 16.
Efeito Stop do gerador.
Solução Eliminar o erro.
11 PROF.EMPILH. DE PROGR. DEM.GRANDE
Ocorre durante o processamento de programa ou de comando.
Causa O programa ou comando KRL não dispõe de memória temporária de ta-
refas suficiente para o processamento.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar a estrutura do programa e resetar o programa.
12 DEMASIADAS MENSAGENS
Causa Foram enviadas mensagens excessivas ciclicamente.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Uma partida a quente do ACR.
13 Erro circuito de segurança
Um canal falhou ou mais de um interruptor de homem morto foi pressio-
Causa
nado.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Eliminar a falha ou não pressionar mais de um interruptor de homem
Solução
morto.
8 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
14 SoftPLC: <Parâmetros>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Supervisionamento de potência tensão de circuito intermédio <Nú-
15 mero do KPS>
Causa Sobrecarga de tensão do circuito intermediário de um KPS.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir a carga.
16 Erro ao carregar o ficheiro O
Erro ao carregar/ler “ident_vx.o”: Memória ou arquivo inexistente.
Causa
A consulta é executada na função de gravar “w_ident_state”.
Efeito Salto para o final no programa de dados de carga.
Copiar o arquivo “ident_vx.o” para o diretório “/ir_spec/l_ident” ou aumen-
Solução
tar a memória alterando o valor de “VxWinRAM” no registro.
17 Foi encontrado hardware desconhecido
Durante o setup foi selecionado um tipo de unidade de comando incor-
Causa
reto (KRC1, KRC1A, KRC2) ou a configuração de hardware é inválida.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Repetir o setup ou alterar a configuração de hardware.
Confirmar bus de acionamento nº DSE<Número DSE> participante
18 nº <Número do participante IBS> desconhecido
Um participante desconhecido foi adicionado ao interbus e não pode ser
Causa
suportado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Remover participante desconhecido do bus de acionamento.
Systemmeldungen 05.03.01 pt 9 de 322
Mensagens de sistema
19 Falha de uma fase do motor <Número do eixo>
O módulo de potência ou a tensão do circuito intermediário estão descar-
Causa
regados.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Ligar os acionamentos.
Solução
Verificar o módulo de potência, DSE.
20 Paragem de emergência externa
Botão PARADA DE EMERGÊNCIA pressionado.
Causa
A parada de emergência foi disparada pelo software.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Eliminar a falha notificada e confirmar.
Solução
Verificar o botão PARADA DE EMERGÊNCIA.
21 Segundo cabo motor não ligado
O segundo cabo do motor não está conectado, ou não está conectado
corretamente. No cabo adicional encontram--se mais dois fios que estão
Causa
ligados ao robô. O sinal de realimentação é conduzido para o KPS X114
pino 7.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar o segundo cabo do motor e o sinal de realimentação no KPS
Solução
X114 pino 7.
22 Temperatura mainboard muito elevada
O ventilador do armário de comando falhou.
Causa
A temperatura ambiente está demasiado alta.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar o ventilador.
Solução Trocar o filtro do ventilador.
Abaixar a temperatura ambiente.
10 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
23 KCP protótipo
Causa Ainda existe um KCP da série anterior conectado.
Efeito Não existe a função watchdog no KCP.
Solução Substituir o KCP existente por uma unidade de série.
24 Folga muito grande <Número do eixo>
O desvio de regulagem ultrapassou um valor limite devido à folga exces-
Causa
siva.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware, etc.
Tempo de arrefecimento do freio <Número do eixo>;<Tempo de ar-
25 refecimento> segundos
Causa O freio do eixo especificado está demasiado quente.
Efeito Os acionamentos são travados durante o tempo de resfriamento.
Solução Aguardar o tempo de resfriamento do freio.
MÓDULO <Número do eixo> KSD <Corrente máxima da KSD> NE-
26 CESSÁRIO
A corrente máxima da unidade não coincide com a corrente máxima con-
Causa
figurada.
DEMASIADOS PARTICIPANTES NO BUS DE ACIONAMENTO DSE
27 <Número DSE>
Excesso de participantes no anel interbus causam um tamanho de pala-
Causa
vra IBS demasiado grande.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir o número de participantes ou o tamanho de palavra.
Systemmeldungen 05.03.01 pt 11 de 322
Mensagens de sistema
Bus de acionamento DSE <Número DSE> participante n.º <Número
28 do participante Interbus> não existe
Causa A configuração de interbus e a estrutura física não coincidem.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Ajustar a configuração de interbus de modo compatível com o hardware.
BUS DE ACIONAMENTO DSE <Número DSE> PARTICIPANTE N.º
29 <Número do participante Interbus> NÃO CONFIGURADO
Causa A configuração de interbus e a estrutura física não coincidem.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Ajustar a configuração de interbus de modo compatível com o hardware.
30 Configuração do bus de acionamento DSE 1 muito comprida
A configuração gera um tamanho de palavra IBS muito grande, devido
Causa
ao excesso de participantes do interbus.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar a configuração IBS.
31 Aviso temperatura <Número do acionamento>
Causa A temperatura é excedida no local especificado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Identificar a causa e eliminar a falha.
Erro POST: liberação de acionamentos durante a entrada em fun-
32 cionamento <Número do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
12 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Erro POST: lerro coletivo controle na tabela de parâmetros <Número
33 do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Erro POST: Codificador FPGA teste loopback erro <Número do acio-
34 namento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Erro POST: erro no módulo de potência FPGA <Número do aciona-
35 mento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
36 Erro POST: conversor A/D erro <Número do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
37 Erro POST: conversor A/D erro offset <Número do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
38 Erro POST: parâmetro <Número do acionamento> inválido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 13 de 322
Mensagens de sistema
39 Erro POST: erro de sistema <Número do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Erro: ultrapassagem do tempo conversor A/D <Número do aciona-
40 mento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
41 Ultrapassagem do tempo: comando a <Número do acionamento>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
42 Parâmetro A <Número do eixo> inválido
Causa O parâmetro especificado não é válido.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o parâmetro de modo correspondente.
Erro durante o ajuste de comutação: regulador ativo <Número do
43 eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
44 Conflito de versões firmware <Número do acionamento>
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a configuração.
14 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Erro durante o ajuste de comutação: falta de tensão <Número do
45 eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Aviso: distância da posição de ajuste demasiado grande <Número
46 do eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
47 Esforço não admissível do motor <Número do acionamento>
Causa O esforço do motor é demasiado elevado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Reduzir o esforço do motor por meio de medidas adequadas (menor
Solução
carga, redução da aceleração, etc.).
48 Erro de comutação <Número do eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
49 Comando inválido <Número do acionamento>
Causa Foi chamado um comando inválido.
Efeito Stop do gerador.
Solução Corrigir o comando.
Systemmeldungen 05.03.01 pt 15 de 322
Mensagens de sistema
IBS <...> master: Surgiu erro de bus. Localização de erro foi ini-
50 ciado.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
51 IBS <...> slave: erro de bus no circuito de slave
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
52 Erro POST: erro FPGA <Número do módulo de potência>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
53 Estado inesperado das saídas <Número do módulo de potência>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
54 Número de modelo errado <Número do módulo de potência>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
16 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
55 Inicialização da DSE
DSE será reinicializado com novos parâmetros.
Se esta mensagem continuar presente, isso indica que a inicialização
Causa
não pôde ser finalizada.
A mensagem não aparece no caso de Office = TRUE em “hw_inf.ini”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Prestar atenção quanto aos erros nos dados da máquina, principalmente
quanto aos erros de derivação do eixo e do módulo de potência.
Solução
Caso os dados da máquina tenham sido alterados, comparar com os
dados da máquina no CD e corrigir, se for o caso.
100 FALHA IMPULSO CODIF. <Número RDW>
Ao ligar a unidade de comando, o RDW não pôde ser inicializado.
Causa
Defeito no RDW, DSE ou no cabo de conexão.
Efeito Sem inicialização.
Verificar o cabo de conexão e as conexões de encaixe entre RDW e
Solução DSE.
Substituir RDW, DSE defeituosos, ou o cabo entre RDW e DSE.
101 FALHA CODIF. MUDANÇA DE SENTIDO <Número RDW>
O sistema base não recebeu a mensagem de resposta “DSEREADY”
Causa
após a inicialização do programa DSE.
Efeito Travamento de todos os comandos ativos.
Verificar se a DSE está bem encaixada.
Solução
Substituir a DSE.
Systemmeldungen 05.03.01 pt 17 de 322
Mensagens de sistema
102 FALHA CABO DO CODIF. <Número do eixo>
Defeito no cabo de codificador.
Conexão de encaixe solta.
Causa
Falta tensão de alimentação.
Codificador com defeito.
Frenagem dinâmica.
Efeito Saída “$ALARM_STOP” com nível de sinal 0.
Travamento de todos os comandos ativos.
Verificar o cabo do codificador.
Verificar as conexões de encaixe.
Solução
Verificar a tensão de alimentação.
Verificar o codificador e substituir, se for necessário.
103 CONJUNÇÃO CODIF. / AVARIA LÂMPADA <Número do eixo>
Causa DSE não recebeu nenhum avanço do sistema base para este eixo.
Frenagem dinâmica.
Efeito Travamento de todos os comandos ativos.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Verificar o perfeito contato na conexão de encaixe entre DSE e MFC,
bem como entre MFC e a placa mãe.
Solução
Se esta medida não trouxer nenhuma melhoria, então substituir DSE ou
MFC.
104 CODIF. SUJO <Número do eixo>
Mensagem do sistema base: O sistema base não ativou o temporizador
Causa watchdog para o supervisionamento da comunicação com a DSE, ou a
DSE não resetou o temporizador watchdog.
Frenagem dinâmica.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” apresenta nível de sinal 0.
Verificar a conexão de encaixe entre DSE e MFC, bem como entre MFC
e a placa mãe (mau contato).
Solução Se isso não trouxer nenhuma melhoria, então substituir DSE ou MFC.
Averiguar se o bus de acionamento ou o bus ISA na placa mãe está sob
interferência (CEM).
18 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
105 FALHA CODIF. TRANSM. VALOR ABSOLUTO <Número DSE>
Cabo ou conexão de encaixe danificada entre DSE e RDW.
Causa O cabo não está conectado, ou está mal conectado.
Falha na transmissão de dados entre DSE e RDW.
Frenagem dinâmica.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” apresenta nível de sinal 0.
Verificar a alimentação de tensão de DSE e RDW (LEDs).
Verificar o cabo (inclusive a blindagem) e conexões de encaixe.
Solução
Verificar a interface serial DSE -- RDW.
Verificar a conexão à massa do robô e do armário.
106 REALIZAR AJUSTE <Número do eixo>
Diferença de valor real da posição é demasiado grande após nova par-
tida, um ajuste da falha não é possível porque não foi executado nenhum
Causa deslocamento de recepção.
Foram carregados dados de correção errados.
Efeito Travamento de todos os comandos ativos.
Solução Efetuar um ajuste.
107 PARAGEM EMERGÊNCIA POR AJUSTE DE ROTATIVIDADE
Acionamento do softkey de ajuste de rotação.
Atribuição de valor $TURN = 1.
Causa
Ajustar um codificador, absoluto ou incremental, quando da instrução
$TURN.
Frenagem dinâmica.
Efeito Saída “$ALARM_STOP sinal 0.
Travamento de todos os comandos ativos.
Solução Acionar duas vezes a tecla Recall para sair do menu de ajuste.
Systemmeldungen 05.03.01 pt 19 de 322
Mensagens de sistema
108 STOP GERADOR ACTIVO
Caso “LAGNP” reconhecer o pedido de uma frenagem dinâmica (bit
Causa “GEN_STOP” ativado pelo processamento da mensagem), “LAGNP”
gera esta mensagem de estado.
A prorrogação da frenagem dinâmica até a imobilização do robô evita dife-
Efeito
rentes estados em “LAGNP” e “LAGHP”.
Quando o robô está imobilizado, esta mensagem é retirada sem ne-
Solução
nhuma mensagem subseqüente.
109 LIBERTAR COMPARADOR <Número>
Causa “Medição rápida” foi ativada.
Para a ativação da “Medição rápida” o sensor de medição precisa ser libe-
Efeito
rado.
Solução Liberar sensor de medição.
Perfil de andamento mais elevado não é possível com eixos adicio-
110 nais acoplados.
Causa Acoplamento de eixos adicionais em perfil de andamento mais elevado.
Solução Alterar a configuração de modo correspondente.
111 TEPRO INATIVO
O SBC não envia mais nenhum sinal de vida ao KRC.
Causa
(TEPRO = processo de tecnologia)
Efeito A interface SBC não pode ser operada.
Solução Reinicializar o programa SBC.
$TOOL inválido: supervisionamento do espaço de trabalho impos-
112 sível
”$TOOL” é inválido com o supervisionamento do espaço de trabalho
Causa
ativo.
Efeito Nenhum.
Solução Atribuir “$TOOL” ou desligar o supervisionamento do espaço de trabalho.
20 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
ESTOURO DA GAMA DE VALORES <Direção de deslocação> <Nú-
113 mero do eixo>
Limite excedido do valor real de um eixo sem--fim.
Causa Valor real > +/-- 90*10E15 incrementos ou --99999000 < $REVO_NUM <
999999000.
O movimento já foi parado:
Efeito -- em modo manual específico do eixo normal,
-- caso contrário, por meio de stop do gerador.
Solução Girar para trás ou novo ajuste do eixo correspondente.
114 Espaço de trabalho Nº <Número do espaço de trabalho> violado
TCP encontra--se em um espaço de trabalho com MODO “INSIDE--
Causa STOP” ou fora de um espaço de trabalho com MODO “OUTSIDE--
STOP”
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Desligar espaço de trabalho.
Solução Selecionar o item de menu “Desativar supervisionamento do espaço de
trabalho” e liberar em modo T1.
115 Libertar espaço de trabalho Nº <Número do espaço de trabalho>
TCP encontra--se em um espaço de trabalho com MODE “INSIDE--
Causa STOP” ou fora de um espaço de trabalho com MODE “OUTSIDE--
STOP”, e o supervisionamento do espaço de trabalho está desativado
Solução Liberar o respectivo espaço de trabalho.
116 COMANDO DE TIMEOUT DA DSE <PV--NR>
Causa A DSE não executou uma instrução.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware na zona DSE, MFC.
Systemmeldungen 05.03.01 pt 21 de 322
Mensagens de sistema
117 Supervisionamento de colisão eixo <Número do eixo>
O torque do motor não está mais na zona de supervisionamento especifi-
Causa
cada.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Verificar dados de carga, se necessário aumentar a zona de supervisio-
Solução
namento.
118 TEMPERATURA DO CORPO REFRIGERANTE <Número do eixo>
O interruptor térmico nos dissipadores de calor do servo estágio final si-
Causa naliza temperaturas demasiado elevadas nos transistores de estágio final
.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar a causa do sobreaquecimento (p. ex., reduzir a carga).
119 TEMPERATURA MOTOR <Número do eixo>
A temperatura do motor do eixo especificado está acima de 155 graus
Causa centígrados. (a sinalização é feita através do elemento PTC no enrola-
mento do motor.)
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Reduzir a carga mecânica.
Solução
Eliminar o erro, se necessário.
120 MOTOR BLOQUEADO <Número do eixo>
O valor nominal do torque fornecido pelo regulador do número de rota-
ções ultrapasse o valor nominal máximo do torque em mais de 30%.
Causa O desligamento ocorre no âmbito do supervisionamento “i*t” ao ser atin-
gido um valor “i*t” de aprox. 0,75 [(valor nominal do torque / valor nomi-
nal máximo do torque)*seg].
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Eliminar a causa da sobrecarga de torque (reduzir velocidade, acelera-
Solução
ção).
22 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
121 SOBRECORRENTE <Número do eixo>
O dispositivo de proteção do supervisionamento da corrente do circuito
Causa
intermediário disparou devido à corrente excedida.
Stop do gerador.
Efeito
Travamento dos comandos ativos.
Eliminar o erro.
Solução Resetar o erro através de uma tecla de confirmação do hardware “ACK”
no módulo DSE I.
122 FALHA DE TRAVÃO <Número do eixo>
O dispositivo de supervisionamento do cabo do freio notificou curto--cir-
Causa
cuito, sobrecarga ou interrupção.
Parada sobre a trajetória.
Efeito
Parada do processamento do programa.
Eliminar o erro.
Solução Resetar o erro no módulo DSE I através da tecla de confirmação do
hardware “ACK”.
123 QUEBRA TENSÃO <Número do eixo>
Causa Servo estágio final interno não está pronto.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Eliminar o erro.
Solução Resetar através da tecla de confirmação do hardware “ACK” no módulo
DSE I.
Systemmeldungen 05.03.01 pt 23 de 322
Mensagens de sistema
124 SOBRETENSÃO <Número do módulo de potência>
Tensão do circuito intermediário demasiado elevada.
A causa disso pode ser:
Causa -- resistência de lastro defeituosa
-- fusível de lastro
-- fonte de alimentação G1
-- rampa de frenagem muito íngreme, etc.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Eliminar o erro.
Solução Resetar através da tecla de confirmação do hardware “ACK” no painel de
operação frontal.
Supervisionamento i*i--t, carga de corrente do cabo do motor <Nú-
125 mero do eixo> passado <Tempo> s 100 %
Eixo sobrecarregado.
Causa O valor da corrente limite máx. admissível é predefinida nos dados da
máquina através de “$CURR_MON[]”.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
Solução Reduzir a carga.
126 Grandeza de regulação / erro de arrasto <Número do eixo>
Causa Erro de arrasto demasiado grande. O eixo não segue o valor nominal.
Stop do gerador.
Efeito Travamento dos comandos ativos.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Verificação dos dados da máquina $IN_POS_MA (janela de posiciona-
mento do eixo) e $FOL_ERR_MA (fator de supervisionamento de erros
de arrasto).
Verificar o conversor de corrente.
Controlar mecânica e motor.
Solução
Verificação dos parâmetros de regulagem e relações de transmissão do
eixo.
Verificação dos dados da máquina $COM_VAL_MI (limitação do nº de
rotações nominal do eixo) e $TL_COM_VAL (tempo de tolerância para a
limitação do nº de rotações nominal).
24 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
127 <Número de eixo> EIXO ADICIONAL ASSÍNCRONO
Causa Eixo adicional está ligado como eixo assíncrono.
FIM DE CURSO SOFTWARE DO EIXO ASSÍNCRONO <Direção de
128 deslocação> <Número do eixo>
Eixo assíncrono deslocou--se para o SOE positivo ou negativo.
Causa O fim de curso do software é verificado ciclicamente, quando o eixo está
ligado como eixo assíncrono.
Solução Liberar o respectivo eixo.
Supervisionamento i*i--t, carga de corrente do cabo do motor <Nú-
129 mero do eixo> passado <Tempo> s 95 %
Eixo sobrecarregado.
Causa O valor da corrente limite máx. admissível é predefinida nos dados da
máquina através de “$CURR_MON[]”.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
Solução Reduzir a carga.
130 K1 contato soldado <Número do módulo de potência>
Causa Contato K1 está soldado.
Frenagem sobre a rampa.
Efeito Travamento dos comandos ativos.
Energia não é desligada.
Solução Substituir contator, KPS.
Circuito intermédio circuito de carregamento com defeito <Número
131 do módulo de potência>
Causa Optoacoplador no KPS não indica fluxo de corrente.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Circuito intermediário não se deixa carregar.
Solução Substituir o respectivo KPS.
Systemmeldungen 05.03.01 pt 25 de 322
Mensagens de sistema
132 Freio com defeito <Número do eixo>
Desgaste do freio.
Causa
Freio defeituoso.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Eventualmente o eixo não poderá ser freado.
Solução Substituir o respectivo motor.
133 Velocidade real <Número do eixo> supervisionamento
Falha no circuito de regulagem:
-- Cabos de motor de dois eixos estão trocados.
Causa -- Erro na configuração dos eixos.
-- Módulo de potência com defeito.
-- Resolver desajustado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar os cabos dos motores.
Eliminar a falha no circuito de regulagem / configuração dos eixos.
Solução
Verificar o módulo de potência e substituir, se for necessário.
Em caso de Resolver desajustado, reajustar o robô.
134 DN CH <...> Fastwrite MacID errado projetado no ficheiro INI
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
135 DN CH <...> erro de módulo <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
26 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
136 DN CH <...> erro de slave <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
137 DN CH <...> erro de firmware
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
138 DN CH <...> erro de hardware
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
139 DN CH <...> erro de bus <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
140 DN CH <...> watchdog no fim
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
141 DN CH <...> erro de usuário <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 27 de 322
Mensagens de sistema
142 DN CH <...> modo de configuração ligado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
143 txt regulação <Número do eixo> ultrapassa valor <Valor I*I*t> %
Quando em um regulador de acionamento é ultrapassado o valor de
alerta para o supervisionamento Ixt, então o robô deve ser imobilizado.
Causa
Caso contrário, ao ser ultrapassado o valor máximo de 100 % o regula-
dor de acionamento desliga.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
144 Aviso de desvio master--slave <Número do eixo>
A variação de posição entre os acionamentos master e slave ultrapassa
Causa
o limite de alerta.
145 Atribuição master--slave errada <Número do eixo>
Causa A atribuição master -- slave não está correta.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir a atribuição.
146 Amplificador de eixo errado <Número do eixo>
Stop do gerador.
Efeito
Travamento dos comandos ativos.
Solução Corrigir.
28 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
ESPAÇO DE TRABALHO DO EIXO N.º <Número do espaço de traba-
147 lho> LIBERAR
O robô encontra--se dentro de um espaço de trabalho (Modo = #IN-
SIDE_STOP) ou fora de um espaço de trabalho (Modo = #OUT-
Causa
SIDE_STOP) e o supervisionamento do espaço de trabalho está desati-
vado.
Efeito O robô pára.
Solução Liberar o espaço de trabalho do eixo.
ESPAÇO DE TRABALHO DO EIXO N.º <Número do espaço de traba-
148 lho> VIOLADO
O robô encontra--se dentro de um espaço de trabalho (Modo = #IN-
Causa
SIDE_STOP) ou fora (Modo = #OUTSIDE_STOP).
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Desligar o espaço de trabalho do eixo ou desativar o supervisionamento
Solução
do espaço de trabalho em modo T1 e liberar o robô.
155 <Número de eixo> eixo adicional desacoplado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
200 ADAPTAÇÃO NÃO PREPARADA
Descarregar o módulo de potência, tensão do circuito intermediário.
Causa PARADA DE EMERGÊNCIA ativada.
Circuito de acionamento interrompido.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Ligar os acionamentos.
Solução Verificar o módulo de potência, DSE.
Verificar o circuito de acionamento.
Systemmeldungen 05.03.01 pt 29 de 322
Mensagens de sistema
201 COMUTADOR DE HOMEM MORTO
O interruptor de homem morto foi solto durante uma função ativa (movi-
Causa
mento de um eixo) no modo de operação T1 ou T2.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Pressionar o interruptor de homem morto.
Solução
Verificar a entrada $SAFETY_SW.
202 Reconfiguração E/S
Causa Reconfigurar E/A foi disparada a partir de BOF.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Aguardar o fim da reconfiguração.
203 LIBERTAR MOVIM. GERAL
Causa Sinal 0 na entrada $MOVE_ENABLE.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a entrada.
204 INTER. FINAL--COMP. FÍSICOS %1 %2 / +24V FALTAM
O interruptor de fim de curso do hardware no eixo especificado foi atin-
Causa
gido na direção informada.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Liberar o eixo no sentido contrário.
30 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
FIM DE CURSO SOFTW. <Direção de deslocação> <Número do
205 eixo>
O valor real do eixo especificado atingiu o valor do interruptor de fim de
Causa
curso do software.
Efeito Travamento de todos os comandos ativos.
Solução Liberar o eixo no sentido contrário.
Parâmetro servo eixo <Número do eixo> linha <Número de passo>
206 incorrecto
Causa Um parâmetro no arquivo servo não está correto.
Solução Corrigir o parâmetro.
207 PROTEGER O OPERADOR
A entrada $USER_SAF apresenta o estado de sinal 0. Modo de opera-
Causa
ção é AUTOMÁTICO ou EXTERNO.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Comutar para o modo de operação T1 ou T2, nestes modos de operação
é permitido o deslocamento com sinal 0.
Solução
Fechar grade de proteção.
Verificar a entrada.
208 Falha do circuito de segurança ESC
Causa Falha no cabeamento de periféricos (circuitos de segurança).
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar a falha diagnosticada e confirmar mensagem.
Systemmeldungen 05.03.01 pt 31 de 322
Mensagens de sistema
209 STOP PASSIVO <CMR ou UMP>
Causa Parada a partir de um aparelho de operação passivo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
210 TECLA DE STOP <UMP ou CMR>
A tecla de partida ou a tecla de direção foi acionada com a tecla de pa-
Causa
rada pressionada.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a tecla de parada.
Controlar lógica de segurança. Tempo de desativação do contator
211 ultrapassado durante a PARAGEM DE EMERGÊNCIA
O tempo máximo de desativação definido para um contator com PA-
Causa
RADA DE EMERGÊNCIA presente foi ultrapassado.
Solução Verificar hardware.
212 Erro ao escrever em PERCEPTRON
Efeito Parada sobre a trajetória.
213 Erro ao escrever em BOSCH.
Efeito Parada sobre a trajetória.
Solução Alterar programa.
32 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
214 Erro de acionamento <Número do eixo>
Causa Um eixo apresenta erro de acionamento.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a mecânica, a elétrica, etc.
215 Erro de acionamento <Número do eixo>
Causa Um erro de acionamento está presente no número de eixo especificado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a mecânica, a elétrica, o cabeamento, etc.
216 ERRO DE ACIONAMENTO <Número do eixo> Nº <Número do erro>
Causa Um erro de acionamento está presente.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Após a confirmação o robô pode prosseguir o movimento até a próxima
Solução mensagem.
Entre em contato com o serviço de assistência KUKA.
217 PARAGEM DE EMERGÊNCIA POR ACR (STOP DE EMERGÊNCIA)
Devido a um erro grave o software de sistema KRC disparou uma parada
Causa
de emergência.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar a falha notificada.
Systemmeldungen 05.03.01 pt 33 de 322
Mensagens de sistema
RESISTÊNCIA DE CARGA <Número do módulo de potência> FICOU
218 LIGADA DURANTE MUITO TEMPO
Causa A energia do eixo freado estava acima do limite.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar o módulo de potência da resistência de lastro e substituir, se for
Solução necessário.
Ajustar a rampa de frenagem menos íngreme.
TEMPERATURA DO ARMÁRIO MUITO ALTA <Número do módulo de
219 potência>
Causa A temperatura do armário de comando está inadmissivelmente alta.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar o funcionamento dos ventiladores no armário de comando.
Verificar se as aberturas de ventilação no armário estão livres, e se há
Solução circulação de ar suficiente.
Reduzir a temperatura ambiente.
Se for o caso, mudar o local de instalação.
ACCIONAMENTOS DESLIGADOS, CIRCUITO INTERMÉDIO AINDA
220 SOB TENSÃO !!!
O contator de acionamento desarma. A energia no circuito intermediário
Causa
ainda é suficiente para assegurar uma parada sobre a trajetória.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Verificar se há falhas no circuito de acionamento.
Solução
Religar os acionamentos.
Modo de serviço não permitido E<VW Posição da chave de segu-
221 rança>
Causa Fechamento E2 em modo de operação “AUTO”.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar o modo de operação.
34 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
ERRO DE PARIDADE NO MÓDULO DE POTÊNCIA <Número do
222 KPS>
Na leitura do registro do módulo de potência ocorreu mais de cinco ve-
Causa zes seguidas um erro de paridade. A interface do módulo de potência
está sob forte interferência ou o módulo de potência está com defeito.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar cabos.
Solução Verificar blindagem.
Substituir módulo de potência.
ERRO DE PARIDADE NO MÓDULO DE POTÊNCIA <Número do
223 eixo>
O cabo de energia do eixo está desconectado do módulo de potência, ou
Causa
está conectado de modo incorreto.
Efeito Travamento de todos os comandos ativos.
Solução Conectar o cabo de energia corretamente.
224 FALHA DE TENSÃO
Causa A alimentação de tensão da unidade de comando foi interrompida.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Restabelecer a alimentação de tensão.
225 CABO DE MOTOR <Número do eixo>
Causa O cabo do motor do número de eixo especificado está com defeito.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
Systemmeldungen 05.03.01 pt 35 de 322
Mensagens de sistema
ERRO DE SENSOR TEMPERATURA DISSIPADOR DE CALOR <Nú-
226 mero do eixo>
Causa Erro de sensor.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o sensor e substituir, se for necessário.
ERRO DE SENSOR TEMPERATURA ESPAÇO INTERIOR <Número
227 do eixo>
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
CONJUNTO DE PARÂMETROS DE ACIONAMENTO ERRADO <Nú-
228 mero do eixo>
Para o número de eixo informado foi especificado o conjunto de parâme-
Causa
tros de acionamento errado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar de modo correspondente.
229 ERRO DE SENSOR TEMPERATURA DO MOTOR <Número do eixo>
Foi notificado um erro para o sensor de temperatura do motor do eixo
Causa
especificado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
36 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
ERRO DE PARÂMETRO <Número do eixo> <Número do conjunto
230 de parâmetros>
Existe um erro de parâmetro para o número do eixo e número do con-
Causa
junto de parâmetros especificados.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
ERRO SINC. ENTRADA MÓDULO DE ACIONAMENTO <Número do
231 eixo>
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar o erro.
ERRO DE SINCRONIZAÇÃO MÓDULO DE ACIONAMENTO <Número
232 do eixo>
Erro de sincronização no módulo de acionamento para o número do eixo
Causa
especificado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
233 <Número do eixo> SEM TENSÃO DE POTÊNCIA
Causa O eixo especificado está sem tensão de potência.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
234 Erro de acionamento <Número do eixo>
Para o número do eixo especificado foi notificado um erro de aciona-
Causa
mento.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
Systemmeldungen 05.03.01 pt 37 de 322
Mensagens de sistema
235 ERRO DE ACIONAMENTO <Número do eixo>
Causa Erro de acionamento no número do eixo especificado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
236 ERRO DE ACIONAMENTO <Número do eixo>
Causa Erro de acionamento no número do eixo especificado.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
237 ERRO DE ACIONAMENTO <Número DSE>
Causa Erro de acionamento.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
238 ERRO DE ACIONAMENTO <Número do eixo>
Causa Erro de acionamento no número do eixo especificado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
38 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Parâmetros de servo <”normais” ou “de configuração”> <Número
239 do eixo> estão a ser carregados
Causa O carregamento dos parâmetros dos reguladores de acionamento.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Aguardar até que os parâmetros estejam carregados.
240 Desligar o armário
Os parâmetros dos reguladores de acionamento estão carregados e se-
Causa
rão válidos apenas na próxima inicialização.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Desligar o armário de comando.
Configuração file servo <Configuração dos dados de máquina> não
241 é adequada para a versão <”Software DSE” ou “Firmware”> de <in-
stalar “Software DSE” ou “Firmware”>
A configuração do arquivo servo contém parâmetros para o regulador de
Causa
acionamento que não são suportados pelo firmware.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Fazer um upgrade do firmware do regulador de acionamento ou dos ar-
Solução
quivos servo.
<Número do eixo> versão de firmware <Versão de firmware nos
242 conversores>
Causa Informação sobre a versão de firmware do respectivo eixo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Fazer um upgrade do firmware do regulador de acionamento ou dos ar-
Solução
quivos servo.
Systemmeldungen 05.03.01 pt 39 de 322
Mensagens de sistema
Software da DSE <Número DSE> não é adequada para o hardware
243 ou DSE com defeito
Causa Foi configurado o software errado para a DSE.
Frenagem sobre a rampa.
Efeito Travamento de todos os comandos ativos.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Verificar se o item “hw_inf.ini” é compatível com o hardware DSE.
Solução
Se for necessário, trocar a DSE.
244 <Número DSE> versão de software não está correto
O software DSE e o software do sistema base não são compatíveis para
Causa
funcionar juntos.
Frenagem sobre a rampa.
Efeito Travamento de todos os comandos ativos.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Imprimir o conteúdo da memória.
Solução
Reinstalar o software KRC.
245 Falha do bus de acionamento DSE <Número DSE>
Cabo de bus defeituoso.
Causa Módulo de bus defeituoso.
Driver de bus defeituoso.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Substituir elemento defeituoso.
40 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Bus servo alterado DSE <Número DSE>, memorização e salva-
246 guarda de dados impossível
A comunicação com o KPS falhou, por isso o buffering não pode ser ati-
Causa
vado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Restabelecer a comunicação com o KPS.
247 Falha do bus de acionamento para <Número do eixo>
Cabo de bus defeituoso.
Causa Módulo de bus defeituoso.
Driver de bus defeituoso.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Substituir elemento defeituoso.
248 Falha do bus de acionamento para <Número do KPS>
Causa Um erro do bus de acionamento está presente.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Eliminar a causa do erro.
249 Entrada $MOVE_ENABLE (1025) não permitida
No modo de operação Automático Externo, $MOVE_ENABLE não pode
Causa
estar projetado em $OUT[1025].
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Reconfigurar $MOVE_ENABLE.
Systemmeldungen 05.03.01 pt 41 de 322
Mensagens de sistema
250 Parâmetro servo <Número do eixo> incorrecto
Causa Parâmetro no arquivo servo está incorreto.
Efeito O parâmetro servo não tem efeito.
Solução Corrigir o parâmetro servo no arquivo.
251 <Variável> DUPLA ATRIB. SAÍDAS ADAPTAÇÃO
Causa Saídas de adaptador foram duplamente ocupadas.
Efeito Não há RC--Ready.
Solução Corrigir a atribuição de valor.
252 <Variável> ERRO DE DIREÇÃO E/S ADAPTAÇÃO <índex correto>
Causa Saída de adaptador foi duplamente ocupada.
Efeito Não há RC--Ready.
Solução Corrigir a data da máquina notificada.
253 <Número do eixo> ENCAMINHAMENTO CIRCUITO DE SINAIS
Uma interface do acionamento foi duplamente ocupada com a data da
máquina $IFACE_DRV[6] ou foi ativada uma interface inexistente.
Outras causas:
Causa
Foram registrados codificadores KTL em $IFACE_DRV[6] sem estar co-
nectados em interfaces APC, ou foram registrados eixos ADAR
$ADAR_AXIS, sem estar conectados em interfaces ADAR.
Efeito Não há RC--Ready.
Solução Corrigir os respectivos dados da máquina.
42 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
254 FICHEIRO DSE NÃO EXISTE <Nome do ficheiro>
O programa DSE, que está registrado em”HW_INF.INI”, não existe.
Um arquivo servo, que está registrado em “\R1\MADA\$MACHINE.DAT”,
Causa
não existe.
O arquivo está vazio ou não pôde ser aberto.
Efeito Travamento de todos os comandos ativos.
Verificar o item no HW_INF.INI ou “\R1\MADA\$MACHINE.DAT” e alte-
rar, se for necessário.
Solução
Verificar se o respectivo arquivo está presente no disco rígido (diretórios
C:\KRC\Roboter\DSE, bem como ..\R1\MADA).
255 <$Variável> VALOR NÃO PERMITIDO
O carregador de dados na máquina detectou que a variável especificada
foi inicializada incorretamente:
Causa
-- o valor limite foi ultrapassado.
-- não existe interrelação lógica entre os dados da máquina.
Efeito Não há RC--Ready.
Solução Corrigir a atribuição de valor.
256 Verificar os dados de máquina!
Na partida a frio foram carregados dados da máquina, dos quais não se
Causa
pode assegurar que sejam válidos para o robô conectado.
Efeito Não há RC--Ready.
Solução Copiar dados da máquina corretos para o disco rígido.
Systemmeldungen 05.03.01 pt 43 de 322
Mensagens de sistema
257 ERRO DADOS UTILIZADOR
O carregador de dados do usuário detectou que foi inicializada uma va-
riável com um valor incorreto:
Causa
-- o valor limite foi ultrapassado.
-- não existe interrelação lógica entre os dados.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir a atribuição de valor da variável especificada.
258 ERRO DADOS OPCIONAIS
O carregador de dados opcionais detectou que foi inicializada uma variá-
vel com um valor incorreto:
Causa
-- o valor limite foi ultrapassado.
-- não existe interrelação lógica entre os dados.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir a atribuição de valor da variável especificada.
259 <”/” ou “/R1”> CARGA DADOS MÁQUINA INTERROMPIDA
A quantidade de erros detectados pelo carregador de dados da máquina
Causa
ultrapassa a capacidade da memória de mensagens.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Processar as mensagens de erro especificadas.
44 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
260 CARGA DADOS UTILIZADOR INTERROMPIDA
A quantidade de erros detectados pelo carregador de dados do usuário
ultrapassa a capacidade da memória de mensagens:
-- o valor limite foi ultrapassado
Causa -- não existe interrelação lógica entre os dados da máquina
-- durante “POWER ON”
-- após a edição dos dados do usuário
-- após a leitura dos dados do usuário
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir as atribuições de valor das variáveis especificadas.
261 CARGA DADOS OPCIONAIS INTERROMPIDA
A quantidade de erros detectados pelo carregador de dados opcionais da
Causa
máquina ultrapassa a capacidade da memória de mensagens.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Processar as mensagens de erro especificadas.
262 <Caminho> ERRO DADOS MAQUINA
O carregador de dados da máquina detectou uma variável com um valor
inadmissível:
Causa
-- o valor limite foi ultrapassado.
-- não existe interrelação lógica entre os dados.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir a atribuição de valor das variáveis especificadas.
Systemmeldungen 05.03.01 pt 45 de 322
Mensagens de sistema
263 ERRO DADOS CORRECÇÃO
O carregador de dados de correção detectou uma variável com um valor
inadmissível:
Causa
-- o valor limite foi ultrapassado.
-- não existe interrelação lógica entre os dados.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir a atribuição de valor das variáveis especificadas.
264 <Caminho> CARGA DADOS CORREÇÃO INTERROMPIDA
A quantidade de erros detectados pelo carregador de dados de correção
Causa
ultrapassa a capacidade da memória de mensagens.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Não há RC--Ready.
Solução Corrigir a atribuição de valor das variáveis especificadas.
265 FICHEIRO RDW <Nome do programa> NÃO EXISTE
Causa O programa RDW registrado em RD_HWINF.INI não existe.
Efeito Travamento de todos os comandos ativos.
Solução Registrar corretamente o programa RDW no arquivo RD_HWINF.INI.
SOBRETEMPERATURA RESISTÊNCIA DE CARGA <Número do mó-
266 dulo de potência>
A temperatura da respectiva resistência de lastro está muito quente.
Causa P. ex.: No programa de movimento são efetuadas acelerações e frena-
gens, em curtos intervalos de tempo.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Inserir tempos de espera no programa de movimento.
Solução
Reduzir as acelerações e frenagens.
46 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
WATCHDOG MÓDULO DE POTÊNCIA <Número do módulo de po-
267 tência>
O watchdog do módulo de potência foi desativado.
Causa
(o disparo através da DSE ocorre no intervalo de 0,125 ms)
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar a DSE.
Solução
Verificar o módulo de potência.
268 ERRO NO TESTE DE MEMÓRIA DA DSE <Número DSE>
Causa O teste de memória da DSE em DP--RAM falhou.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Substituir DSE ou MFC.
269 DSE <Número DSE> INEXISTENTE
Não está presente o bit na MFC, que indica se uma DSE existe, apesar
Causa
de haver eixos encaixados na DSE.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar a DSE.
Solução
Verificar o MFC.
CONFIGURAÇÃO DO MÓDULO DE POTÊNCIA <Número do eixo>
270 ERRADA
Causa $PMCHANNEL duplamente ocupado ou canal incorreto.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
O carregador de dados da máquina é interrompido.
Solução Corrigir $PMCHANNEL.
Systemmeldungen 05.03.01 pt 47 de 322
Mensagens de sistema
Nº de robô <Número de série do robô (RDW)> não é igual ao fi-
271 cheiro de calibração <Número do ficheiro de calibração>
O arquivo de calibração não é compatível com o número de série do
Causa
robô.
Solução Instalar o arquivo de calibração correto.
272 Nº de robô não foi programado.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
273 Existem vários ficheiros de calibração
Causa Existem vários arquivos de calibração.
Solução Atribuir o arquivo de calibração correto.
274 Verificar nº de robot
Causa Não existem arquivos de calibração.
Solução Atribuir o arquivo de calibração.
275 Configurar nº de robot -- programar nome de robot.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
48 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
276 Dados de máquina não correspondem ao tipo de robot.
Os dados da máquina carregados na unidade de comando não corres-
Causa
pondem ao tipo de robô.
O robô não pode ser movimentado!
Atenção!
Como os dados da máquina não correspondem ao tipo de robô, este pode
Efeito ser danificado em decorrência de sobrecarga ao ser movimentado.
Se apesar disso o robô for operado com dados da máquina incorretos, ces-
sam todos os direitos à garantia do fabricante!
Solução Carregar os dados da máquina corretos.
277 Reposicionamento automático
$MOT_STOP_OPT = TRUE. O robô não se encontra na trajetória pro-
gramada. Em EXTERN, o usuário definiu (via BOF) $MOT_STOP (flag
Causa indicador que o robô não está na trajetória) como FALSE, de modo que o
robô segue para a trajetória automaticamente em velocidade de pro-
cesso.
Efeito Apenas um aviso que o robô se movimenta na trajetória em EXTERN.
Solução A mensagem é apagada automaticamente, tão logo SAK seja atingida.
278 Erro da Protecção K1
Causa O contato no contator de acionamento K1 está colado.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Trocar o módulo de potência.
Comutador de realimentação demasiado longo em <Número do
279 KPS> durante o carregamento
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
Systemmeldungen 05.03.01 pt 49 de 322
Mensagens de sistema
280 Excesso de tensão <Número do KPS> durante o carregamento
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar hardware.
281 Verificar acumulador <Número do KPS>
A bateria não é mais carregada corretamente.
Causa
A bateria é muito velha ou está com defeito.
Eventualmente perda do ajuste.
Efeito Partida a frio.
Comandos ativos travados.
Solução Trocar a bateria.
282 Baixa tensão <Número do KPS> durante o carregamento
Mensagem vem diretamente do KPS.
Causa
O circuito intermediário não pôde ser carregado.
Frenagem dinâmica.
Efeito
Comandos ativos travados.
Verificar as tensões de alimentação do KPS quanto a falhas e interrup-
Solução ções (especialmente a rede trifásica).
Caso for necessário, substituir o KPS.
283 Erro do travão <Número do KPS> canal <Canal de frenagem>
Causa Ocorreu um erro do freio.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware correspondente.
50 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Tensão do acumulador em <Número do KPS> abaixo de<Nível da
284 tensão> durante o último buffering
A tensão da bateria estava muito baixa para manter o buffer do armário
durante o último desligamento.
Causa
A bateria não é mais carregada corretamente.
A bateria é muito velha ou está com defeito.
Eventualmente perda do ajuste.
Efeito Partida a frio.
Comandos ativos travados.
Solução Trocar a bateria.
285 Configuração de RIO modificada: necessário reinicializar!
É necessária uma reinicialização para que a alteração de configuração
Causa
RIO torne--se válida.
Solução Executar reinicialização.
286 Atenção: Ventilador do PC abaixo da velocidade nominal
Causa A velocidade do ventilador do PC caiu abaixo do nº de rotações nominal.
Efeito Os componentes podem sobreaquecer.
Solução Verificar o ventilador do PC e substituir, se for necessário.
287 Erro do ventilador do PC
Causa O ventilador do PC está defeituoso.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Substituir o ventilador do PC.
Systemmeldungen 05.03.01 pt 51 de 322
Mensagens de sistema
288 Sobretemperatura resistência de carga <Número do KPS>
A resistência de lastro tornou--se muito quente, devido às acelerações e
Causa
frenagens demasiado freqüentes no programa de movimento.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Reduzir a aceleração.
Solução
Inserir tempos de espera.
289 Sobretemperatura ventilador <Número do módulo de potência>
Causa Um dos ventiladores no armário está com defeito.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Substituir o ventilador defeituoso.
FECHAR PORTA DO ARMÁRIO DE COMANDO -- CASO CONTRÁRIO
290 PERDA DE GARANTIA
Causa A porta do armário de comando ficou aberta durante mais de 30 minutos.
Efeito Risco de penetração de sujeira.
Solução Fechar a porta do armário de comando.
291 PORTA DO ARMÁRIO DE COMANDO ABERTA
Causa A porta do armário de comando está aberta.
Solução Fechar a porta.
INTERLIGAÇÃO E/S: ATRIBUIÇÃO DUPLA SAÍDA <Número da
292 saída>
Causa A saída especificada está ocupada múltiplas vezes.
Efeito Travamento de todos os comandos ativos.
Solução Alterar o programa de forma correspondente.
52 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
INTERLIGAÇÃO E/S: NÃO PODE SER CONFIGURADA MAIS QUE
293 <Número lado esquerdo> INTERLIGAÇÃO
Causa Foram configuradas mais interligações do que aquelas informadas.
Efeito Travamento de todos os comandos ativos.
Solução Reduzir a quantidade de interligações E/S de modo correspondente.
294 <Saída/entrada> PARÂMETRO FORA DA SUA ÁREA <máx. E/S>
Causa O parâmetro especificado está fora da área.
Efeito Travamento de todos os comandos ativos.
Solução Alterar o parâmetro de forma correspondente.
INTERLIGAÇÃO E/S: SAÍDA <Número da saída> É UMA SAÍDA DE
295 SISTEMA
Causa A saída especificada é uma saída de sistema.
Efeito Travamento de todos os comandos ativos.
Solução Alterar o programa de forma correspondente.
300 MUDANCA MODO DE OPERAR
Causa O seletor de modos de operação está numa posição inválida.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Colocar o seletor de modos de operação numa posição válida.
Movimento de medição interrompido -- é concluído como movi-
301 mento de teste
A tecla de partida ou de segurança foi solta durante a determinação dos
Causa
dados de carga.
Efeito O movimento de medição foi considerado como movimento de teste.
Solução O movimento de medição deve ser reinicializado.
Systemmeldungen 05.03.01 pt 53 de 322
Mensagens de sistema
302 <Nome da instrução> ATIVO
Causa O comando OBJH é executado.
Efeito Nenhum.
Solução Aguardar até que OBJH esteja novamente liberado.
303 LIMITAÇÃO <Nome do sinal>
Causa O valor para a respectiva saída analógica está fora da área normalizada.
O valor da respectiva saída analógica é limitado no valor máximo ou mí-
Efeito
nimo.
A mensagem permanece presente até que valor da respectiva saída
Solução analógica esteja dentro da área normalizada, e portanto, uma limitação
não seja mais necessária.
304 ENTRADA EM SERVIÇO
Causa O menu de entrada em serviço foi selecionado.
Efeito Nenhum processamento do programa é possível.
Solução Sair do menu de entrada em serviço com a tecla RECALL.
305 Análise completa ativa
Causa O compilador executa uma análise completa.
Solução Aguardar até que a análise completa seja concluída.
306 SELECCAO ACTIVA
Uma nova seleção exige um cancelamento prévio ou finalização do pro-
Causa
cesso de vinculação.
Efeito Nenhum.
Solução Aguardar até que o processo de vinculação seja concluído.
54 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
307 Erro na análise completa -- ficheiros ERR existem
Causa Detectou--se erros na análise completa e foram criados arquivos Error.
Efeito Arquivos com erros não são executáveis.
Solução Alterar programas. Favor observar os avisos nos arquivos Error.
Modo de paletização: Movimentar eixo <Número do eixo> <Direção
308 de deslocação> até à posição
No modo de paletização ($PAL_MODE = TRUE) o eixo 4 ou 5 não está
Causa
na posição esperada, i. é., eixo 4 = 0 grau e eixo 5 = 90 graus.
Efeito Nenhum.
Solução Deslocar o eixo na direção especificada.
309 Seleção de passo : necessário movimento SAK em T1/T2
Causa Foi executada uma seleção de passo em um programa defeituoso.
Efeito O programa não é executado.
É necessário executar um movimento SAK para que o robô volte para a
trajetória programada.
Cuidado perigo de colisão!
No movimento SAK o robô se desloca em uma trajetória não progra-
Solução
mada.
Verificar previamente o Override manual e prestar atenção para não par-
tir em velocidade demasiado elevada.
Ajustar o modo de operação T1 ou T2 e acionar a tecla de partida.
310 Falta liberação de acionamento (externo)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 55 de 322
Mensagens de sistema
ERRO INTERNO (arquivo: <Nome do ficheiro>, linha: <Número da
313 linha>, valor: <Valor de retorno>)
Causa Ver 1574 (erro de sistema)
Efeito Ver 1574 (erro de sistema)
Solução Ver 1574 (erro de sistema)
314 Erro de bateria do codificador <Eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
315 Avaria do ventilador do armário
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Arquivo <Nome do ficheiro> deve estar codificado para sistema
316 ROBOCOASTER
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
317 Erro RoboCoaster. Não é possível selecionar o programa
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Arquivo <Nome do ficheiro> não pode estar codificado para
318 sistema Não--RobôCoaster
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
56 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
319 Aguardando sincronização do relógio
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
320 Eixos são simulados <Bitmask of simulated axes>
Causa O valor da variável $Simulated_Axis é diferente de zero.
Efeito Os eixos simulados não são deslocados durante a execução do programa.
Solução A simulação pode ser desligada através do ajuste de $Simulated_Axis = 0.
321 MDR: MONITORIZAÇÃO DO TEMPO EM <Tarefa>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
322 Módulo de freio individual <Número do eixo> não existe
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
323 DSE--IBS--C<C32 ou C33> necessário
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
324 Versão de firmware KSD <Número do eixo> errada
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 57 de 322
Mensagens de sistema
325 Desativação segura de eixo individual <Número do eixo> ativa
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
326 Erro de comunicação com CAN--RDW <Número do eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
327 Deslocação de memória ativa!
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
328 KCP: erro de conexão <TIMEOUT ou DATA_ERROR>
Solução Nenhum.
Arquivo de cenário não existe. Sistema de controle de colisões não
330 está ativo
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Número máximo de robôs ultrapassado (<Número máximo de
331 robôs>). Sistema de controle de colisões desligado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
58 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Robô <Nome do robô> desconhecido. Excluído pelo sistema de
332 controle de colisões
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Erro de carregamento arquivo de cenário. Sistema de controle de
333 colisões desligado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Robô <Nome do robô> perda de ajuste. É excluído pelo sistema de
334 controle de colisões
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Pausa de movimento devido a interrupt de <Nome/IP dos
335 causadores>
Quando no Interrupt de uma unidade de comando dependente (através
de uma atribuição LK()) foi executado o BRAKE ou um movimento, a
Causa
unidade de comando independente é parada durante o tempo no qual o
BRAKE atua.
O movimento pára até a unidade de comando dependente sair do pro-
Efeito
grama de Interrupt.
336 Pacote de cooperação de movimento não instalado
Uma função de cooperação de movimento foi iniciada, porém o pacote
Causa
de software não está instalado.
Solução Favor instalar o pacote de cooperação de movimento.
337 Curto--circuito circuito intermédio <Número do módulo de potência>
Causa KPS precisa fornecer uma corrente muito elevada.
Efeito O KPS é desligado para autoproteção.
Systemmeldungen 05.03.01 pt 59 de 322
Mensagens de sistema
Corrente de pico demasiado elevada <Número do módulo de
338 potência>
Causa KPS precisa fornecer uma corrente de pico muito elevada.
Efeito O KPS é desligado para autoproteção.
Solução Reprogramar a trajetória do robô, deslocar mais lentamente.
Corrente efetiva demasiado elevada <Número do módulo de
339 potência>
Causa KPS precisa fornecer uma corrente efetiva muito elevada.
Efeito O KPS é desligado para autoproteção.
Solução Reprogramar a trajetória do robô, deslocar mais lentamente.
340 Falha de uma fase de rede <Número do módulo de potência>
Causa Uma fase da rede trifásica falhou.
Efeito O KPS não consegue mais fornecer a potência requerida.
Solução Verificação de mau contato, verificação de cabo quebrado.
Ventilador defeituoso. Substituir módulo <Número do eixo, Número
341 do KPS> para evitar parada.
O ventilador no conversor de uma unidade de comando Cobra está com
Causa
defeito.
Efeito O resfriamento do conversor não é mais suficiente.
Solução Verificar a livre rotação do ventilador, troca do ventilador.
342 Desvio posição absoluta eixo DSE -- RDW <Número do eixo>
O valor para a posição absoluta, calculado na DSE, diverge do valor na
Causa
RDW em mais de 1/4 de rotação do Resolver.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
60 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Erro <Código de erro interno> ao ler arquivo de configuração
343 <Nome do ficheiro>
Para um eixo com força regulada ocorreu um erro durante a leitura do
arquivo de configuração no diretório Mada.
Código de erro:
Causa
1: Não foi possível abrir o arquivo.
2: Falta um item.
3: Dados inconsistentes.
Efeito A regulagem de força não é ativada.
Eliminar o erro no arquivo de configuração.
Solução
Desligar explicitamente a regulagem de força ($LOOP_TYPE <> 6).
344 Sem operação multiplex para canal DSE <Número de canal>
Modo força ativado, mas a RDW não possui cartão de inserção para
Causa
operação multiplex.
Efeito O modo força não é ativado.
Inserir cartão RDW.
Solução
Desativar explicitamente o modo força.
345 <Nome do status> <Parâmetro opcional> <Parâmetro opcional>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Slaves não estão prontos (antes de INTERPOLAÇÃO) <Nome/IP dos
346 causadores>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Slaves não estão prontos (após frenagem remota) <Nome/IP dos
347 causadores>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 61 de 322
Mensagens de sistema
348 Master não está pronto <Nome/IP dos causadores>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
349 Faltam slaves de tempo <Nome/IP dos causadores>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
350 Status temporizador: <Master/Slave>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
351 Status temporizador: <Master/Slave> -- não sincronizado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
352 Status temporizador: <Master/Slave> -- sem impulso MASTER
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
353 Status temporizador: estado inválido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
62 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Master espera por arranque de interpolação das slaves <Nome/IP
354 dos causadores>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Conflito de versões com módulo externo: versão <Versão do mó-
355 dulo> com versão <Versão necessária>
A versão do módulo externo não é compatível com a versão suportada
Causa
pelo sistema base.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
O módulo externo deve ser instalado com a versão requisitada ou o mó-
Solução
dulo externo não pode ser carregado.
356 Defeito do cabo de codificador ext. posinput <Número do eixo>
Cabo do codificador de entrada da posição externa está com defeito.
Conexão de encaixe solta.
Causa
Falta tensão de alimentação.
Codificador com defeito.
Frenagem dinâmica.
Efeito Saída $ALARM_STOP com nível de sinal 0.
Travamento de todos os comandos ativos.
Verificar o cabo do codificador.
Verificar as conexões de encaixe.
Solução
Verificar a tensão de alimentação.
Verificar o codificador e substituir, se for necessário.
Systemmeldungen 05.03.01 pt 63 de 322
Mensagens de sistema
357 Foi detectada dependência geométrica mútua
A máquina local comporta--se simultaneamente como master e slave em
Causa
relação a uma máquina remota.
Efeito Possibilidade de movimentos imprevisíveis.
Solução Alterar o programa para evitar a dependência circular.
Amplitude de regulação regulador de força <Número do eixo> n.º
358 <Tipo do erro>
O sinal do sensor de força não é adequado para o movimento.
Tipo de erro Nº 1: A força real se altera e a posição permanece con-
stante.
Tipo de erro Nº 2: A posição se altera e a força real permanece con-
Causa stante.
Tipo de erro Nº 3: A pinça abre mais do que a posição correspondente a
FORCE_LIM.
Estes supervisionamentos são ativos apenas durante a regulagem de
força!
Frenagem dinâmica.
Efeito Comandos ativos travados.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Verificar o sensor de força.
Solução Verificar o cabo do sensor de força.
Verificar o cartão de inserção RDW.
359 Falta liberação de acionamento <Número do módulo de potência>
KPSi da unidade de comando Cobra não indica nenhuma liberação de
Causa
acionamento.
Efeito O robô pára.
Solução Eliminar o erro no KPSi.
64 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
360 Status temporizador: erro de inicialização
A sincronização do temporizador, exigida pela cooperação de movimen-
Causa tos bem como pelo sistema de controle de colisões, não pôde ser iniciali-
zada corretamente.
Efeito Cooperação de movimentos não permitida.
Verificar as conexões da sincronização do temporizador e reinicializar a
Solução
unidade de comando.
Foram descobertos vários “masters” na rede de sincronização dos
361 temporizadores
Duas ou mais unidades de comando na rede de sincronização dos tem-
Causa
porizadores foram configuradas como “master”.
A unidade de comando causadora do problema é forçada a passar para
Efeito
um estado “slave”.
Configurar uma unidade de comando na rede de temporizadores como
Solução
“master”.
362 Confirmar canal de frenagem não aberto <Número do eixo>
Causa Um freio deste eixo está aberto ou o eixo não está mais sob regulagem.
Efeito Nenhum.
Comandar todos os eixos juntos em um canal de frenagem ou utilizar
Solução
unidade de comando de freio individual.
363 Posição máxima master--slave ultrapassada <Número do eixo>
A posição máxima admissível do slave em incrementos (8000000) foi
Causa
ultrapassada.
Devido aos fatores de escalonação (Float) ocorrem erros de cálculo rela-
Efeito
tivos à velocidade real, erro de arrasto e variação de posição.
Adequar a zona de trabalho, de forma que fique dentro de +-- 8000000
Solução
incrementos.
Systemmeldungen 05.03.01 pt 65 de 322
Mensagens de sistema
364 Modo de operação inválida (?)
Causa Foi detectado um modo de operação inválido.
Efeito Acionamentos travados.
Solução Trocar KCP.
365 Erro ao carregar <Nome do módulo>
Ocorreu um erro grave ao carregar um objeto predefinido (dados compi-
Causa
lados são sobrescritos).
Efeito Os dados da máquina são inconsistentes.
366 Sincronização com <machine list> não é possível
Foi feita uma tentativa de estabelecer uma sincronização de programa
Causa ou de movimento. Mas não foi possível criar um canal de comunicação
com a respectiva unidade de comando.
A sincronização não é possível enquanto não for estabelecida uma cone-
Efeito
xão.
Verificar a conexão correta do cabo de rede e se os respectivos endere-
Solução
ços IP estão configurados corretamente.
66 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Falta acumulador DSE <Número DSE> KPS <Número do KPS>.
367 Salvar os ajustes antes de desligar.
Três causas possíveis:
Falta prontidão do tampão de memória, p. ex., a bateria não está conec-
tada ou está conectada com os pólos invertidos.
Causa Não existe uma opção DC--USV--Modul_15 para cada KPS, mas o supervi-
sionamento de bateria em $OPTION.DAT está ativado por
$EXT_ACCU_MON=TRUE.
Nenhuma DSE--IBS--C33 está instalada.
Caso a bateria não esteja conectada ou esteja conectada com os pólos
Efeito invertidos, pode ocorrer uma perda do ajuste ou de dados em caso de
desligamento ou queda de energia.
Antes de desligar, salvar o ajuste para evitar a sua perda. Se o robô for
movimentado antes de desligar, o ajuste deve ser salvo novamente.
Caso a opção DC--USV--Modul_15 esteja presente, verificar a conexão
da bateria.
Caso vários KPS estejam conectados à unidade de comando e
$EXT_ACCU_MON=TRUE, mas não há um DC--USV--Modul_15 conec-
Solução tado para cada KPS, então é necessário que no KPS sem supervisioa-
mento de bateria, a entrada X114/pino 6 seja ligada em 24V, pois caso
contrário a entrada não conectada causará a emissão desta mensagem.
Se nenhum DC--USV--Modul_15 estiver presente, colocar o valor
$EXT_ACCU_MON em FALSE.
Se nenhuma DSE--IBS--C33 estiver presente, substituir a DSE por uma
DSE--IBS--C33 ou colocar o valor $EXT_ACCU_MON em FALSE.
Acumulador defeituoso DSE <Número DSE> KPS <Número do
368 KPS>. Salvar os ajustes antes de desligar.
Causa A bateria não é suficiente para manter um tampão de memória confiável.
Em caso de desligamento ou queda de energia pode ocorrer uma perda
Efeito
do ajuste ou de dados.
Instalar novas baterias. Em caso de várias baterias e apenas uma opção
de hardware DC--USV15, a KUKA recomenda trocar todas as baterias
(portanto, trocar também as não supervisionadas).
Solução
Antes de desligar é preciso salvar o ajuste, para evitar a sua perda. Se o
robô for movimentado antes de desligar, o ajuste deve ser salvo nova-
mente.
Systemmeldungen 05.03.01 pt 67 de 322
Mensagens de sistema
369 Tipo de execução do programa comutação ainda não ativa!
Na comutação do tipo de execução do programa, de “#GO/#PSTEP”
para “#xSTEP”, é necessário que ocorra uma seleção de passo implícita
para o atual passo principal de execução, para cancelar um eventual
avanço planejado e poder continuar em modo Step.
Esta seleção de passo não é possível, se execução principal ainda esti-
Causa
ver em um subprograma, porém o interpretador (avanço) já saiu do
mesmo.
Neste caso o movimento continua em “#GO/#PSTEP” até o final do sub-
programa, e a comutação para “#xSTEP” torna--se efetiva somente de-
pois de concluído o processamento do subprograma.
Apesar da comutação de tipo de execução do programa para “#xSTEP”,
Efeito
o robô continua a funcionar em “#GO” até sair do subprograma.
Solução A mensagem desaparece tão logo a comutação torne--se efetiva.
Falha de uma fase de rede DSE <Número DSE> KPS <Número do
370 KPS>
Falta uma fase da alimentação de tensão do KPS. Isso pode ser o caso
Causa já antes da conexão ao armário.
Também falta a respectiva ligação no armário.
Se o problema não for eliminado, o robô pára após aprox. um minuto. É
Efeito
contado apenas o tempo no qual o robô realmente se move.
Assegurar a alimentação de tensão de todas as três fases. Verificar a
Solução ligação necessária no armário: X110/pino2 deve estar ligado em 24V e
X110/pino3 deve estar ligado no aterramento.
372 Erro geral KSD <Número do eixo>
O KSD do respectivo eixo indica um estado de erro geral. Informações
precisas sobre este estado de erro do KSD são fornecidas pelas mensa-
gens subseqüentes.
Se a mensagem é gerada sem mensagens subseqüentes, isto significa
que o erro no KSD esteve presente por tão pouco tempo, que a DSE não
pôde ler o número do erro no KSD, antes de o erro desaparecer nova-
Causa mente. Neste caso é necessário realizar a leitura da memória de erros no
respectivo KSD. Para isso é preciso abrir a ferramenta DSERDW e ex-
portar os locais de código do respectivo KSD para um arquivo de proto-
colo.
Informações mais precisas sobre o histórico de erros são fornecidas pe-
los locais de código 162, 163 e 164, o local de código 161 contém o erro
atual.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Contatar a equipe de assistência técnica KUKA.
68 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
373 Reconfiguração MDR iniciada, espere por favor
Causa Foi enviado um comando de recarregar MDR via BOF.
Parada sobre a trajetória.
Efeito
Comandos ativos travados.
O estado desaparece sozinho após a conclusão bem sucedida da recon-
Solução
figuração.
374 Defeito de hardware DSE n.º <Número DSE> (<Tipo do erro>)
Causa Foi detectado um defeito de hardware no cartão DSE.
Efeito O sistema é parado por motivos de segurança.
Solução Substituir a DSE.
375 Aquecimento ativo
O robô não está na temperatura operacional.
”$WARMUP_RED_VEL” é TRUE.
Causa
O passo PTP é executado e ao menos uma corrente do motor é maior
que “$WARMUP_CURR_LIMIT”.
Efeito A velocidade do robô é reduzida.
376 Força máxima ultrapassada <Eixo>
Após a ativação da regulagem de força “($Force[Eixo] > FORCE_LIM)”,
Causa o sinal do sensor de força é maior que “FORCE_MAX + UPPER_LI-
MIT_TOL”.
Frenagem dinâmica.
Efeito Comandos ativos travados.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Verificar e, se necessário, corrigir o valor do sensor de força
“$Force_act[Eixo]” com o auxílio da função de menu “Exibir -- Variável --
Individual”.
Solução
Verificar o sensor de força e o cabo.
Verificar o registro Trace do grupo de teste “Regulagem de força”, se o
regulador não está com sobreoscilação demasiado forte.
Systemmeldungen 05.03.01 pt 69 de 322
Mensagens de sistema
Configuração de mensagens errada: <Ficheiro de configuração>
381 Linha: <Linha com falha>
No arquivo “ext_conf.ini” foi configurada uma mensagem inexistente.
Causa No arquivo “ext_conf.ini” foi configurada uma mensagem de aviso.
No arquivo “ext_conf.ini” foi configurada uma mensagem de estado.
Efeito Comandos ativos travados.
Alterar de modo correspondente o arquivo “ext_conf.ini” e executar uma
Solução
partida a frio da unidade de comando.
1000 MEMORIA DO UTILIZADOR DESTRUIDA ...
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1001 FALHA INTERNA (DADOS DA MENSAGEM NÃO DEFINIDOS)
Causa Interna; os dados da mensagem não foram definidos corretamente.
1002 Novo arranque da unidade de comando após falha de tensão
A unidade de comando é religada.
Causa
A tensão de alimentação está presente novamente.
1003 EXCEDIDO NÍVEL < IP, PCP >
Sobrecarga no tempo de cálculo da CPU.
Causa
Cíclico.
Frenagem dinâmica.
Efeito Saída “$ALARM_STOP” com nível de sinal “0”.
Travamento de todos os comandos ativos.
Elevar o ciclo base.
Solução Elevar o ciclo de interpolação ou o ciclo de ajuste da posição (depen-
dendo do parâmetro notificado).
70 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1004 Controlador CAN <...> defeituoso
Causa O controlador CAN está com defeito.
Efeito O sistema de bus CAN não funciona.
Solução Verificar o controlador.
1005 NÃO HÁ CAPACIDADE DE MEMÓRIA NO SISTEMA
A memória do sistema está muito pequena para executar os comandos
Causa
“SHOW VAR” ou “SET INFO”.
Efeito O comando não é executado.
Salvar os programas que não são necessários em suporte de dados,
Solução
para liberar capacidade de memória.
1006 NÃO HÁ CAPACIDADE DE MEMÓRIA DO UTILIZADOR
Causa Capacidade de memória insuficiente para copiar objetos.
Efeito O comando não é executado.
Solução Apagar objetos não necessários, para liberar capacidade de memória.
1007 CANAL <Nome do canal> NÃO UTILIZAVEL
Causa O canal selecionado não pode ser utilizado.
Efeito O comando não é processado.
Solução Liberar canal em outro local.
1008 Arranque em frio da unidade de comando
A unidade de comando foi inicializada pela primeira vez (não é uma reini-
Causa
cialização após queda de tensão).
Efeito Nenhum.
Systemmeldungen 05.03.01 pt 71 de 322
Mensagens de sistema
Conversão d. pontos impossível sem modelo com precisão
1009 absoluta.
Não é possível efetuar a conversão sem modelo, quando $ABS_ACCUR
Causa
= FALSE e $ABS_CONVERT = TRUE.
As coordenadas de ponto não podem ser convertidas para o modelo de
robô com precisão absoluta .
Efeito Importante:
Após uma conversão de ponto é necessário definir novamente
$ABS_CONVERT como FALSE!
FALHA INTERNA <Número do erro de sistema> (<Task--ID>,
1010 <Status>)
Causa Teste interno do software KRC.
RC--READY foi retirada no processamento e uma partida a quente foi
Efeito
acionada.
Solução Confirmar mensagem.
Erro de sintaxe ao ler o ficheiro <Nome do ficheiro> na linha
1011 <Conteúdo da linha>
Erro de sintaxe na interpretação do arquivo de parâmetros (robô de pre-
Causa
cisão absoluta).
Efeito O comando não é processado.
Solução Carregar o arquivo, reinicializar a unidade de comando.
FALHA GERAL: <Número do erro> <Função> <Informação
1012 adicional>
Resposta desconhecida de uma função no objeto durante o processa-
Causa
mento de comando.
Efeito Nenhum.
Solução Favor informar o seu serviço de assistência ao cliente KUKA.
72 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1013 Ficheiro <Nome do ficheiro> não encontrado
O arquivo de parâmetros para robô de precisão absoluta não foi encon-
Causa
trado.
Efeito O comando não é processado.
Carregar o arquivo.
Solução
Reinicializar a unidade de comando.
1014 FALHA DE COMP. DESCON.: <Categoria de erros>
Causa O software do compilador detectou um erro.
Efeito Nenhum.
Solução Favor contatar o seu serviço de assistência ao cliente KUKA.
1015 ERRO DE OBJECTO: <Localização>
Causa Erro interno em OBJH.
Efeito Nenhum.
Solução Favor contatar o seu serviço de assistência ao cliente KUKA.
1016 INTER. FINAL--COMP. FÍSICOS / +24V FALTAM
O supervisionamento de adaptador detectou que uma entrada de soma
Causa
foi ativada para um interruptor de fim de curso do hardware.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Liberar o robô.
Confirmar mensagem.
Solução ATENÇÃO!
A liberação requer um cuidado especial. Não há travamentos específicos
de eixo ativados.
Systemmeldungen 05.03.01 pt 73 de 322
Mensagens de sistema
Robot com precisão absoluta. Conversão d.pontos só possível em
1017 modo T1
Causa $ABS_CONVERT = TRUE, porém sem modo de operação T1.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Definir a variável “$ABS_CONVERT” no arquivo “$CUSTOM.DAT” como
Solução FALSE ou selecionar modo T1.
Confirmar mensagem.
1018 Erro ao ler o ficheiro IDF
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1019 Modo de paletização não é possível com este tipo de robô
Quando $ROBROOT A ou B < > 0, a paletização não é possível.
Causa A paletização com robôs só é possível em caso de montagem no chão
ou no teto.
Efeito Stop do gerador.
Solução Introduzir $ROBROOT corretamente ou definir $PAL_MODE = FALSE.
1020 FALHA INTERNA <Número do erro> (<Task--ID>, <Return--Status>)
Causa Erro interno de software.
Favor contatar o seu serviço de assistência ao cliente KUKA compe-
Solução
tente.
1021 <Nome de objeto> FALHA INTERNA NO ACESSO
Causa Ocorreu um erro interno durante o acesso a um objeto.
Efeito A ação não é executada corretamente.
74 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1022 CONEXÃO <Aparelho de operação> -- ACR INTERROMPIDA
A conexão do aparelho de operação ativo à unidade de comando KRC
Causa
foi interrompida durante a execução de um movimento em modo teste.
Efeito Frenagem dinâmica.
Solução Restabelecer a conexão.
1023 LIMITE AMORTECEDOR DE ENTRADA
Causa O tampão de recepção está cheio.
Efeito A unidade de comando não aceita mais nenhum telegrama.
Ler telegrama com CREAD.
Solução
Aumentar o número de tampões de entrada no arquivo SERIAL.INI.
1024 Erro ao ler o ficheiro INI
Causa O arquivo INI lido está danificado.
Efeito Travamento de todos os comandos.
Solução Corrigir o arquivo INI de modo correspondente.
1025 ERRO DE CONFIGURACÃO DO CARREGADOR E/S <Nome do driver>
Causa Erro no arquivo “IOSYS.INI” (diretório “...\KRC\ROBOTER\INIT”).
Efeito O aplicativo pertencente a este driver não funciona mais.
Solução Verificar o arquivo “IOSYS.INI” e alterar de modo correspondente.
1026 ERRO DE LEITURA PORT ** NAS ENTRADAS DIGITAIS
Causa Erro no hardware de E/S.
Efeito Parada sobre a trajetória.
Solução Verificar os respectivos componentes E/S.
Systemmeldungen 05.03.01 pt 75 de 322
Mensagens de sistema
1027 ERRO DE ESCRITA PORT ** NAS SAÍDAS DIGITAIS
Causa Erro no hardware de E/S.
Efeito Parada sobre a trajetória.
Solução Verificar o respectivo hardware de E/S.
1028 ERRO DE REARRANQUE E/S <Nome do bus/driver>
Causa Erro de bus de campo continua presente.
Efeito As entradas e saídas de bus não estão disponíveis.
Solução Eliminar o erro no hardware do bus de campo.
SEN: <Dados do sensor1> <Dados do sensor2> <Dados do
1029 sensor3>
Causa Mensagem de aviso de um sensor que não requer uma parada.
SEN: <Dados do sensor1> <Dados do sensor2> <Dados do
1030 sensor3>
Causa Erro de sensor que exige um frenagem sobre a rampa.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Específica em função do sensor.
SEN: <Dados do sensor1> <Dados do sensor2> <Dados do
1031 sensor3>
Causa Erro de sensor que exige um stop do gerador.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Específica em função do sensor.
76 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
SEN: <Dados do sensor1> <Dados do sensor2> <Dados do
1032 sensor3>
Causa Erro de sensor que exige uma parada sobre a trajetória.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Específica em função do sensor.
1033 Erro ao ler, carregador: <Número do driver> <0>
Efeito Parada sobre a trajetória.
1034 Erro ao escrever, carregador: <Número do driver> <0>
Efeito Parada sobre a trajetória.
1035 Movimento sem singularidades: erro de orientação máx.
Causa Foi atingido o erro de orientação máximo.
Efeito Parada sobre a trajetória.
Alterar a trajetória de forma correspondente.
Solução Alterar o erro de orientação predefinido no frame $SINGUL_ERR_JOG
(para modo manual) ou $SINGUL_ERR_PRO (para modo de programa).
Controlar lógica de segurança. Tempo de reação do contator
1036 ultrapassado na PARAGEM DE EMERGÊNCIA
Causa O tempo definido para o contator desarmar foi ultrapassado.
Efeito Travamento de todos os comandos ativos.
Solução Controlar lógica de segurança.
Systemmeldungen 05.03.01 pt 77 de 322
Mensagens de sistema
1037 PARAGEM DE EMERGÊNCIA interna premida
Causa Foi disparada PARADA DE EMERGÊNCIA interna.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
1038 Modo de serviço não permitido
Causa A tecla “Partida para trás” foi acionada em modo AUT ou EXT.
Modo de operação não permitido.
Efeito
É permitido apenas T1 ou T2.
Solução Mudar para modo de operação T1 ou T2.
1039 Movimento para trás não é possível: registo já executado
Causa Os movimentos registrados já foram executados.
Efeito A trajetória não pode ser percorrida para trás.
Solução Mover para frente com a tecla de partida.
1040 Movimento para trás não possível: não existe registo
No sentido para frente não foi percorrido e registrado nenhum ponto, ou
Causa
o registro foi removido.
Efeito Não pode percorrer a trajetória para trás.
Solução Mover para frente com a tecla de partida.
1041 SoftPLC: <Parâmetro de texto variável>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
78 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1042 Quit K1 contacto soldado <Número do módulo de potência>
Causa Mensagem após “Contato K1 soldado <Número KPS>”.
Solução Confirmar mensagem.
1043 Quit circuito intermédio <Número do módulo de potência>
Mensagem após “Circuito intermédio circuito de carregamento com de-
Causa
feito <Número do KPS>”.
Solução Confirmar mensagem.
1044 Quit freio com defeito <Número do eixo>
Mensagem após “Freio com defeito <Eixo>”.
Causa Desgaste do freio.
Freio defeituoso.
Confirmar mensagem.
Solução
Substituir o respectivo motor.
1045 Simulação do robô
Causa A variável $SERVO_SIM está definida como TRUE.
Efeito Os programas são executados sem movimento do robô.
Para encerrar a simulação do robô, definir a variável $SERVO_SIM
Solução
como FALSE.
1046 Ativar saídas bloqueado em AUT/EXT.
A variável “$BLK_IO_AUT” está definida como TRUE.
Causa
Houve uma tentativa de definir as saídas manualmente.
Efeito Nenhum.
Solução A variável “$BLK_IO_AUT” está definida como FALSE.
Systemmeldungen 05.03.01 pt 79 de 322
Mensagens de sistema
1047 Simulação do robô só é possível em modo de teste.
Causa A simulação do robô não é possível nos modos “#AUT” ou “#EXT”.
Efeito Travamento de todos os comandos ativos.
Solução Mudar o modo de operação.
Confirmar supervisionamento de potência tensão do circuito inter-
1048 médio <Número do KPS>
Mensagem após “Supervisionamento de potência tensão de circuito in-
Causa
termédio KPS ...”.
Parada sobre a trajetória.
Efeito
Travamento dos comandos ativos.
Solução Confirmar mensagem.
Profibus Master está no estado AUTOCLEAR. Executar o comando
1049 Reset
Erro de bus no profibus.
Causa Está definida a opção AUTOCLEAR.
É necessário resetar o bus.
Aviso que é necessário resetar o bus, porque o bus não reinicializa auto-
Efeito
maticamente (a respectiva opção não está definida).
Solução Eliminar o erro de bus e efetuar o RESET através do menu.
1050 PROFIBUS: ERRO NO CIRCUITO MASTER <> <>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1051 PROFIBUS: ERRO NO CIRCUITO SLAVE
Solução Eliminar o erro no circuito slave.
80 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1052 KCP: ERRO CAN--BUS
Causa Erro de transmissão no CAN--Bus tarefa UMP.
Efeito Parada sobre a trajetória.
Solução Confirmar mensagem.
Redução de velocidade ponto <Nome do ponto> <dummy> em <Re-
1053 dução em %>.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1054 DN CH <...> muitos erros de módulo <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1055 Trace Puffer vazio, iniciar interpretação para trás
Registro vazio ao mover para trás.
Causa
Comutação para método SCAN.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar bus de acionamento nº DSE<Número DSE> participante
1056 nº <Número do participante IBS> desconhecido
Mensagem subseqüente à mensagem de estado “Bus de acionamento
Causa Nº DSE: <Número DSE> Nº participante: <Participante IBS> desconhe-
cido”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 81 de 322
Mensagens de sistema
1057 Confirmar falha de uma fase do motor <Número do eixo>
Causa A tensão da bateria compensadora está muito baixa.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Trocar a bateria.
Solução
Confirmar mensagem.
1058 Movimento BCO: Premir Start--Plus
Houve uma tentativa de efetuar um movimento SAK com a tecla de par-
Causa
tida para trás (--).
Efeito O robô não inicia.
Utilizar a tecla de partida (+).
Solução No arquivo BACKWARD.INI introduzir o seguinte: Implícita_AÇÕES=
TRUE.
1059 Subrotina terminada: Salto de movimentos
Durante o movimento para trás o interpretador encontrou um subpro-
Causa
grama já completamente processado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
$BWDSTART não está na FOLD. Não se encontrou informação da
1060 Base ou Tool
Mover para trás com o método SCAN: como primeira instrução em uma
pasta de movimento deve estar programada uma atribuição
Causa
$BWDSTART. a partir desta linha todas as instruções são executadas
até o movimento, antes de ocorrer o movimento para trás.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Corrigir o programa ou inserir em BACKWARD.INI a seguinte linha:
BACKWARDSTART = FALSE.
Solução
Neste caso, a troca de BASE e TOOL durante o movimento para trás
não são considerados!
82 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1061 PARADA EMERGÊNCIA rápida com rampas frenagem fixas
Na PARADA DE EMERGÊNCIA com modelo dinâmico é utilizada uma
Causa estratégia com rampas de frenagem fixas definidas, devido à frenagem
nitidamente mais rápida.
Na PARADA DE EMERGÊNCIA a frenagem é mais rápida do que na
Efeito
estratégia baseada no modelo dinâmico.
Verificar os limites de torque para PARADA DE EMERGÊNCIA.
Solução
Verificar dados de carga.
1062 Conf. segundo cabo motor não ligado
Mensagem subseqüente à mensagem de estado: “Segundo cabo motor
Causa
não conectado.”
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Conf.: sobretemperatura resistência de carga <Número do módulo
1063 de potência>
Mensagem subseqüente à mensagem de estado: “Sobretemperatura
Causa
resistência de carga <...>”
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1064 Conf.: sobretemperatura ventilador <Número do módulo de potência>
Mensagem subseqüente à mensagem de estado: “Sobretemperatura
Causa
ventilador <...>”
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 83 de 322
Mensagens de sistema
1065 Conf.: temperatura mainboard muito elevada
Mensagem subseqüente à mensagem de estado: “Temperatura main-
Causa
board muito elevada <...>”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1066 Temperatura mainboard atingiu limite de aviso
Ventilador do armário de comando demasiado alto.
Causa
A temperatura ambiente está demasiado alta.
Verificar o ventilador.
Solução
Trocar o filtro do ventilador.
1067 Supervisionamento temperatura mainboard não disponível
Ventilador do armário de comando demasiado alto.
Causa A mainboard não fornece suporte a nenhum supervisionamento de tem-
peratura.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Desligar o supervisionamento de temperatura.
Solução
Trocar a mainboard.
1068 INTERBUS: Watchdog tempo ultrapassado!
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
84 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1069 Confirmar patinagem muito grande <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Patinagem muito
Causa
grande <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1070 CONFIRMAR: tempo de arrefecimento dos freios <Eixo>
Mensagem subsequente da mensagem de estado.”Tempo de arrefeci-
Causa
mento do freio <Tempo de resfriamento>”.
Solução Confirmar mensagem.
1072 TORQUE DE PARADA FREIO <Número do eixo> ULTRAPASSADO
O torque do freio no eixo não é suficiente para manter o braço do robô
Causa
constantemente num ponto aleatório do espaço.
Efeito Parada do interpretador.
Verificar dados de carga.
Solução Reduzir a carga.
Confirmar mensagem.
1073 TORQUE NOMINAL DO REDUTOR <Número do eixo>
Causa O torque do redutor permitido foi ultrapassado.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Saída “$Alarm_STOP” vai para o nível 0.
Verificar dados de carga.
Se necessário reduzir a carga.
Solução Reduzir a aceleração programada.
Reduzir a aceleração programada.
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 85 de 322
Mensagens de sistema
1074 TORQUE NOMINAL DO MOTOR <Número do eixo>
O torque permitido do motor foi ultrapassado (depende dos dados dinâ-
Causa
micos $DYN_DAT(), cíclicos).
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Saída “$Alarm_STOP” vai para o nível 0.
Verificar dados de carga.
Se necessário reduzir a carga.
Solução Reduzir a aceleração programada.
Reduzir a aceleração programada.
Confirmar mensagem.
1075 ENERGIA CINÉTICA MÁXIMA <Número do eixo>
Causa A energia cinética permitida para o caso de colisão foi ultrapassada.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Saída “$Alarm_STOP” vai para o nível 0.
Verificar dados de carga.
Reduzir a carga, se for necessário.
Solução
Reduzir a aceleração programada.
Confirmar mensagem.
CONFIRMAR: NECESSÁRIO MÓDULO <Número do eixo> KSD
1076 <Corrente máxima da KSD>
Mensagem subseqüente à mensagem de estado “Módulo <...> KSD--
Causa
<...> necessário”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
86 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
CONFIRMAR: DEMASIADOS PARTICIPANTES NO BUS DE ACIONA-
1077 MENTO DSE <Número DSE>
Mensagem subseqüente à mensagem de estado “Demasiados partici-
Causa
pantes no bus de acionamento DSE <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar: bus de acionamento DSE <Número DSE> participante
1078 n.º <Número do participante Interbus> não existe
Mensagem subseqüente à mensagem de estado “Bus de acionamento
Causa
DSE <...> Participante <...> inexistente”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar: bus de acionamento DSE <Número DSE> participante
1079 n.º <Número do participante Interbus> não existe
Mensagem subseqüente à mensagem de estado: “Bus de acionamento
Causa
DSE <...> Participante Nº <...> não configurado”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
CONFIRMAR: CONFIGURAÇÃO DO BUS DE ACIONAMENTO DSE
1080 <Número DSE> MUITO COMPRIDA
Mensagem subseqüente à mensagem de estado: “Configuração do bus
Causa
de acionamento DSE <...> muito comprida”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 87 de 322
Mensagens de sistema
1081 Confirmar: aviso temperatura <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Aviso de temperatura
Causa
<...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: liberação de acionamento durante entrada em
1082 funcionamento <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Liberação
Causa
de acionamento durante entrada em funcionamento <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: erro global de controle na tabela de parâme-
1083 tros <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Erro cole-
Causa
tivo controle na tabela de parâmetros <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: codificador FPGA teste loopback erro <Nú-
1084 mero do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Codifica-
Causa
dor FPGA teste loopback erro <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
88 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Confirmar erro POST: erro no módulo de potência FPGA <Número
1085 do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro no módulo de
Causa
potência FPGA <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: conversor A/D erro <Número do aciona-
1086 mento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Conversor
Causa
A/D erro <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: conversor A/D erro offset <Número do acio-
1087 namento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Conversor
Causa
A/D erro Offset <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro POST: parâmetro não válido <Número do aciona-
1088 mento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Parâme-
Causa
tro <...> inválido “.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 89 de 322
Mensagens de sistema
1089 Confirmar erro POST: erro de sistema <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Erro de
Causa
sistema <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro: ultrapassagem do tempo conversor A/D <Número
1090 do acionamento>
Mensagem subseqüente à mensagem de estado: “Erro POST: Ultrapas-
Causa
sagem do tempo conversor A/D <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar ultrapassagem do tempo: comando a <Número do acio-
1091 namento>
Mensagem subseqüente à mensagem de estado: “Ultrapassagem do
Causa
tempo: Comando para <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1092 Confirmar parâmetro não válido A <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Parâmetro <...> invá-
Causa
lido”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
90 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Confirmar erro durante ajuste de comutação: regulador ativo <Nú-
1093 mero do eixo>
Mensagem subseqüente à mensagem de estado: “Erro durante o ajuste
Causa
de comutação: Regulador ativo <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1094 Confirmar conflito de versões firmware <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Conflito de versões de
Causa
firmware <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro durante o ajuste de comutação: sem tensão <Nú-
1095 mero do eixo>
Mensagem subseqüente à mensagem de estado: “Erro durante o ajuste
Causa
de comutação: Sem tensão <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar aviso: distância da posição de ajuste muito grande <Nú-
1096 mero do eixo>
Mensagem subseqüente à mensagem de estado: “Aviso: Distância da
Causa
posição de ajuste muito grande <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 91 de 322
Mensagens de sistema
Confirmar número de modelo não válido <Número do aciona-
1097 mento>
Mensagem subseqüente à mensagem de estado: “Esforço não admissí-
Causa
vel do motor <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1098 Confirmar erro de comutação <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Erro de comuta-
Causa
ção<...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1099 Confirmar comando não válido <Número do acionamento>
Mensagem subseqüente à mensagem de estado: “Comando não válido
Causa
<...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1100 PARAGEM <Número do eixo>
O eixo foi movimentado a partir da posição de imobilidade, dependendo
dos dados da máquina:
Causa
-- “$FOL_ERR_MA” (valor limite do erro de arrasto) e
-- “$TL_FOL_ERR” (tempo de tolerância valor limite do erro de arrasto).
Frenagem dinâmica.
Efeito Saída “$ALARM_STOP” apresenta nível de sinal 0.
Travamento de todos os comandos ativos.
Aumentar o valor limite do erro de arrasto.
Prolongar o tempo de tolerância valor limite do erro de arrasto.
Solução
Verificar o estágio final do freio motor.
Confirmar mensagem.
92 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1101 VALOR NOM. ATRIBUI ACELER. <Número do eixo>
A aceleração nominal foi excedida; dependendo dos dados da máquina:
Causa -- “$ACC_ACT_MA” (valor limite aceleração nominal) e
-- “$TL_ACC” (tempo de tolerância aceleração nominal).
Parada sobre a trajetória.
Efeito Saída “$ALARM_STOP” apresenta nível de sinal 0.
Travamento de todos os comandos ativos.
Verificar o programa quanto às passagens Alpha5.
Prolongar o tempo de tolerância aceleração nominal.
Solução Reduzir a amplificação da regulagem de posição.
Verificar o estágio final.
Confirmar mensagem.
1102 VALOR NOM. ATRIB. DE VELOC. <Número do eixo>
A velocidade permitida foi excedida; dependendo dos dados da máquina:
Causa
-- “$VEL_ACT_MA” (valor limite velocidade nominal) e
-- “$TL_VEL” (tempo de tolerância velocidade nominal).
Parada sobre a trajetória.
Efeito Saída “$ALARM_STOP” apresenta nível de sinal 0.
Travamento de todos os comandos ativos.
Prolongar o tempo de tolerância valor velocidade nominal.
Solução Verificar o estágio final.
Confirmar mensagem.
1103 FALTA TRANSMISSÃO DE DADOS DE TEPRO
Causa O SBC envia dados cíclicos atrasados (TEPRO = processo tecnológico).
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Reinicializar o programa SBC.
Solução Eliminar erros no programa SBC.
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 93 de 322
Mensagens de sistema
1104 Confirmar valor de regulação <Número do eixo>
Mensagem subseqüente à mensagem de estado “Valor de regulação
<Número do eixo>”.
Erro de arrasto demasiado grande. O eixo não segue o valor nominal.
Causa
Se a mensagem de confirmação vier sem uma mensagem de estado
anterior, isto significa que o supervisionamento de erro de arraste atuou
no sistema base.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” apresenta nível de sinal 0.
Confirmar mensagem.
Verificação dos dados da máquina:
-- $IN_POS_MA (janela de posicionamento do eixo),
-- $FOL_ERR_MA (fator de supervisionamento de erros de arrasto ) bem
como
Solução -- $VEL_DSE_MA (supervisionamento de velocidade).
Verificar o conversor de corrente.
Controlar mecânica e motor.
Verificação dos parâmetros de regulagem e relações de transmissão do
eixo.
1105 VIGILÂNCIA DE POSICIONAMENTO <Número do eixo>
A janela de posicionamento “$IN_POS_MA” não foi alcançada dentro do
Causa
tempo de posicionamento ajustado “$TIME_POS”.
Stop do gerador.
Travamento de todos os comandos ativos.
Efeito
Após a confirmação da mensagem vale para o eixo: “Posição alcan-
çada”.
Aumentar o valor para a janela de posicionamento “$IN_POS_MA”.
Aumentar o valor para o tempo de posicionamento “$TIME_POS”.
Executar a compensação da deriva.
Solução
Verificar a amplificação do circuito de regulagem.
Verificar a mecânica.
Confirmar mensagem.
1106 AINDA SEM PROGRAMAÇÃO DO PESO DA FERRAMENTA.
Durante o ajuste EMT foi efetuado um movimento de teste para uma fer-
Causa
ramenta, cujo peso ainda não foi “programado”.
Solução ”Programar” o peso da ferramenta.
94 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
O shunt do supervisionamento do espaço de trabalho só é possível
1107 no modo T1.
No modo de operação T2, AUT ou EXT houve uma tentativa de alterar o
Causa
valor da variável “$WBOXDISABLE”.
Solução Mudar para o modo de operação T1.
1108 Erro durante o Stop gerador <Número do eixo>
Causa O valor real não diminui, apesar de a rampa de frenagem ser predefinida.
Stop do gerador.
Efeito Saída “$ALARM_STOP” apresenta nível de sinal 0.
Travamento de todos os comandos ativos.
Verificar o módulo do circuito de medição.
Solução
Verificar o codificador do valor de ajuste.
1109 TRANSMISSÃO DE DADOS PARA TEPRO POSSUI FALHAS
Causa O SBC busca dados cíclicos atrasados (TEPRO = processo tecnológico).
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Reinicializar o programa SBC.
Solução
Confirmar mensagem.
1110 Deslocamento de recepção para <Eixo> realizada
No deslocamento de recepção foi detectado o sensor do ponto de comu-
Causa
tação.
1111 DERIVA EXECUTADA
Causa Deriva foi concluída.
Systemmeldungen 05.03.01 pt 95 de 322
Mensagens de sistema
1112 Realizar deslocamento de recepção <Número do eixo>
O deslocamento de recepção não foi executado.
Causa
Arquivo “$ROBCOR.DAT” não existe.
Efeito Travamento de todos os comandos ativos.
Solução Favor contatar o seu serviço de assistência ao cliente KUKA.
1113 DESLOC. DE RECEPÇÃO NÃO PERMITIDO <Número do eixo>
O eixo não estava ajustado no instante do comando “Deslocamento de
recepção”.
Causa
Último tipo de ajuste antes foi ajuste de falha (com o comando “ADJUST
SENSOR”).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Ajustar o eixo por meio de UEA ou comparador.
Solução Sair do menu com Recall.
Confirmar mensagem.
1114 SEQUÊNCIA DE AJUSTE NÃO PERMITIDA
A seqüência de ajuste predefinida não foi cumprida (dependente dos da-
Causa
dos da máquina “$SEQ_CAL”).
Solução Efetuar o ajuste cumprindo a seqüência prescrita.
1115 Parâmetros servo não memorizados!
O parâmetro servo não foi enviado à DSE (na descrição da estrutura
Causa
$SERVOPARA).
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Descrever corretamente a estrutura”$SERVOPARA”.
96 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1116 AJUSTE DE SENSOR NÃO PERMITIDO <Número do eixo>
O eixo selecionado para o ajuste de falha possui um codificador incre-
Causa
mental ou absoluto.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Ajustar o eixo por meio de UEA ou comparador.
1117 DADOS ACÍCLICOS DE TEPRO NÃO LIBERADOS
Uma Samafora impede o acesso a dados acíclicos (TEPRO = processo
Causa
tecnológico).
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Solução Eliminar erros no programa SBC.
1118 DADOS CÍCLICOS DE TEPRO NÃO LIBERADOS
Uma Samafora impede o acesso a dados cíclicos (TEPRO = processo
Causa
tecnológico).
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Solução Eliminar erros no programa SBC.
1119 TIPO DE DADOS DE TEPRO INCORRECTO
Causa O SBC envia dados errados em ciclos (TEPRO = processo tecnológico).
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Solução Eliminar erros no programa SBC.
Systemmeldungen 05.03.01 pt 97 de 322
Mensagens de sistema
1120 INDICAÇÃO INCOMPLETA
Causa A interface para o SBC ainda não está inicializada.
Efeito Nenhum.
Solução Inicializar a interface para SBC.
1121 TRANSMISSÃO DE DADOS
Causa SBC pára intercâmbio de dados devido a erros.
Frenagem sobre a rampa.
Efeito
Interrupção da interface SBC.
Solução Eliminar erros no programa SBC.
1122 SAÍDA ANÁLOGA : REDUÇÃO DO ATRASO
A memória interna para a funcionalidade de saída analógica “Delay” dis-
Causa
ponibilizada não é suficiente para o valor de atraso programado.
O “Delay” programado será automaticamente reduzido do modo corres-
Efeito
pondente.
Solução Programar um valor menor para o “Delay”.
1123 POSICIONAM. APROX. IMPOSSÍVEL
Aproximação não é possível devido ao tempo de cálculo
Causa
(Ao atingir o critério de aproximação em IPO)
Efeito Nenhum.
Programar valor para “$ADVANCE” > 0.
Solução
Desligar simulação de eixo.
98 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1124 POS. DE ARRANQUE INCORRECTA
O ajuste EMT não se inicia antes da colagem, e sim depois..
Causa O cabo do ajuste EMT encontra--se por trás do”Deslocamento de recep-
ção” ou “Ajuste de falha”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Levar os eixos a serem ajustados para a posição de partida correta.
Solução Se for o caso, cabos inseridos de forma errada para o ajuste EMT devem
ser desconectados.
1125 FALHA COMPARADOR MED. KTL
Causa Tecla exibe o símbolo zero.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar a conexão de rosca na tecla.
Solução Verificar a conexão EMT no robô.
Controlar o módulo A3/DSE.
1126 INSTRUÇÃO DE STOP IGNORADA
O eixo não pára dentro de uma determinada faixa de tempo após uma
Causa
instrução para parar.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Repetir a medição.
Solução
Confirmar mensagem.
1127 AJUSTE EXECUTADO <Número do eixo>
Houve a tentativa de ajustar novamente um eixo já ajustado anterior-
Causa
mente.
Efeito Frenagem sobre a rampa.
Solução Cancelar com RECALL.
Systemmeldungen 05.03.01 pt 99 de 322
Mensagens de sistema
1128 Stop, sobreposição não é possível
A sobreposição não é possível devido ao planejamento da trajetória ou
Causa
por motivos de tempo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Reduzir a velocidade no passo e/ou, se for o caso, na aceleração até
Solução
que a sobreposição seja possível.
1129 Demasiadas instruções ASYPTP
Causa Ocorre no processamento do programa em comandos ASYPTP.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir o número de comandos ASYPTP em sequência.
1130 CONFIRMAR TEMPERATURA DO MOTOR <Número do eixo>
A temperatura do motor no eixo especificado na mensagem estava muito
Causa
alta.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1131 Confirmar supervisionamento de colisão eixo <Número do eixo>
Causa O torque do motor não está na zona de supervisionamento especificada.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Verificar dados de carga.
Solução Aumentar a janela de tolerância.
Confirmar mensagem.
100 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1132 REFPV DETERMINA EIXO <Número do eixo>
Esta mensagem é emitida depois que os pontos de referência para os
Causa
eixos individuais foram calculados.
Efeito Nenhum.
1133 Torque do redutor eixo ultrapassado <Número do eixo>
As causas para esta mensagem podem ser várias, p. ex.:
O torque do redutor calculado é maior que o torque do redutor máx. per-
mitido.
A corrente nominal do regulador do número de rotações da DSE é in-
Causa compatível com a corrente nominal do sistema base.
A posição do robô programada não pode ser alcançada.
O codificador de posição da RDW está com defeito.
Utilização de dados de carga errados ou colisão.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Reprogramar os pontos para reduzir o torque.
Solução Verificar o codificador de posição/RDW e substituir, se for necessário.
Verificar os dados de carga e corrigir, se for necessário.
1134 Confirmar falha 6SC620 <Número do eixo>
Falha ou erro no módulo de conversão ou processador do Simodrive
Causa
6SC620 confirmado.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 101 de 322
Mensagens de sistema
1135 Velocidade modo torque ultrapassado <Número do eixo>
Causa A velocidade permitida no modo torque foi ultrapassada.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir a velocidade de modo correspondente.
1136 CONF. TEMP. DO DISSIPADOR DE CALOR <Número do eixo>
Causa Temperatura do dissipador de calor demasiado alta.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1137 EXCEDIDO CURSO CALIBR. UEA
Entalhe não encontrado.
Causa
A posição do eixo antes da partida não estava antes do entalhe.
Efeito Frenagem sobre a rampa.
Deslocar para a posição de ajuste (ver manual de operação).
Solução Verificar UEA.
Verificar o entalhe de medição no eixo.
1138 STOP GERADOR
Quando com a PARADA DE EMERGÊNCIA ativa ocorre uma falha, que
Causa permite apenas um stop do gerador, essa mensagem é emitida adicional-
mente.
Efeito Stop do gerador.
Solução Confirmar mensagem.
102 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1139 SYNACT NÃO EXECUTAVEL <Número de passo>
A programação de ações sincronizadas com as variáveis “$M_TIME” ou
“$M_TIME_APO” leva a esta mensagem em caso de continuação do
Causa
programa após frenagem sobre a rampa, rampa de PARADA DE
EMERGÊNCIA na trajetória ou frenagem dinâmica.
1140 MUDANÇA DE PASSO COM STOP
Em caso de uma frenagem dinâmica ou parada na trajetória durante uma
mudança de passo,não é possível efetuar o cálculo de “$POS_RET” e
Causa da hora do sistema.
”$POS_RET” e a hora do sistema são determinados pelo início de um
novo passo.
Frenagem sobre a rampa.
Efeito
Parada do processamento do programa.
Alterar a ação de operação, de modo que a parada não ocorra ao
Solução
mesmo tempo que a mudança de passo.
1141 TTS NÃO EXISTE
O eixo X do sistema de coordenadas da ferramenta e a tangente da tra-
Causa jetória correm paralelamente.
(TTS = triedro acoplado à ferramenta que acompanha a trajetória)
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Reprogramar o movimento.
Solução
Executar uma correção de ponto.
1142 DEFLEXÃO NO PONTO DE DESTINO
Causa Um ponto de precisão fixo foi atingido com deflexão.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o valor “SCALE_IN”.
Systemmeldungen 05.03.01 pt 103 de 322
Mensagens de sistema
1143 DESLOCAM. PONTO REFER. INVÁLIDO
O ajuste através da memorização do deslocamento do ponto de referên-
Causa
cia não é possível, pois este não é válido em “$ROBCOR.DAT”.
1144 FORMA DO ENTALHE NÃO PERMITIDA
Causa O entalhe de ajuste no ajuste UEA não é um entalhe em “V” ou “U”.
Frenagem sobre a rampa.
Efeito O movimento de ajuste é interrompido.
Travamento de todos os comandos ativos.
Limpar UEA.
Solução
Substituir o entalhe UEA.
STOP devido à ultrapassagem da gama de valores <Direção de des-
1145 locação> <Número do eixo>
Causa Limite excedido do valor real de um eixo sem--fim.
Efeito Stop do gerador.
Solução Reajuste do respectivo eixo.
1146 CONFIRMAR MOTOR BLOQUEADO <Número do eixo>
Causa Uma DSE notificou um supervisionamento “ I * t “.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
104 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1147 REALIZAR PRIMEIRO AJUSTE <Número do eixo>
Houve uma tentativa de realizar um deslocamento de recepção para um
Causa
eixo, para o qual ainda não foi executado um primeiro ajuste.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Executar o primeiro ajuste para o eixo correspondente (ajuste com com-
Solução
parador ou UEA).
PARTE D.ACOPLAMENTO D.EIXO NÃO PERMITIDO <Número do
1148 eixo>
Houve uma tentativa de executar um “ajuste de falha ampliado” para um
Causa eixo, sendo que os eixos a serem acoplados não estavam em posição no
momento de transferência de dados.
Frenagem sobre a rampa.
Efeito Travamento de todos os comandos ativos.
A função”ajuste de falha ampliado” não é executada.
Colocar os eixos a serem acoplados na mesma posição, tal como na
Solução
transferência de dados.
1149 MOVIMENTO D.AJUSTE NÃO PERMITIDO <Número do eixo>
Houve uma tentativa de executar um “ajuste de falha” ou o eixo não está
Causa
equipado com um codificador KTL e DSE.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Cancelar com “RECALL”, ou ajustar com UEA/COMPARADOR.
1150 TRANSFERÊNCIA DE DADOS NÃO PERMITIDA <Número do eixo>
Houve uma tentativa de executar um deslocamento de recepção para um
Causa
eixo que não está equipado com um codificador KTL e DSE.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Cancelar com RECALL.
Systemmeldungen 05.03.01 pt 105 de 322
Mensagens de sistema
1151 REALIZAR TRANSFERÊNCIA DE DADOS <Número do eixo>
Houve uma tentativa de realizar um ajuste de falha para um eixo, para o
Causa
qual ainda não foi executado um deslocamento de recepção.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Realizar o deslocamento de recepção para o eixo correspondente.
1152 TRANSFERÊNCIA DE DADOS REALIZADA <Número do eixo>
Causa O deslocamento de recepção foi realizado corretamente.
Efeito Nenhum.
1153 DEFLEXÃO NO PONTO DE ARRANQUE
Um movimento PTP deverá ser executado com um valor de correção do
Causa
sensor.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução O offset do sensor deve ser removido antes de executar um passo PTP.
1154 ERRO SBC : <watchd.,transf.,corr>
Causa Erro durante a comunicação entre SBC e KRC32.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware e o software da SBC.
106 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1155 APROXIMAÇÃO NÃO PERMITIDA DEVIDO A SOBRECARGA
A zona de sobreposição não é suficientemente grande. Os torques per-
mitidos foram ultrapassados.
Causa
Para a execução do passo de sobreposição a velocidade tem de ser re-
duzida já no passo anterior.
Efeito Interpretador.
Aumentar o comprimento do passo individual através da redução do raio
de aproximação no atual ponto de destino do passo de movimento ou, se
Solução houve uma aproximação do ponto de início, através da redução deste
raio de aproximação.
Reduzir a velocidade e a aceleração do passo anterior.
Erro <Número de erro> no planeamento do trajecto PTP, ev. sem
1156 aproximação
Erro interno no planejamento do passo de aproximação.
Causa Para a execução do passo de aproximação a velocidade tem de ser re-
duzida já no passo anterior.
Dependendo do número do erro, eventualmente não será feita a aproxi-
Efeito mação. É realizada uma “parada exata”.
Se apesar disso for efetuada a aproximação, não há outros efeitos.
Alterar os dados de perfil de modo correspondente (velocidade, acelera-
ção, raio de aproximação).
Solução
Se necessário entrar em contato com a KUKA, para efetuar uma afina-
ção dos algoritmos numéricos.
SOBRECARGA ESTÁTICA EM <Número do eixo> DO TORQUE DO
1157 REDUTOR <Valor em %>
O torque do redutor máx. permitido no eixo identificado é ultrapassado
Causa
estaticamente no valor % indicado.
Efeito Parada do interpretador.
Verificar dados de carga:
-- Massa
Solução
-- Centro de gravidade
-- Momentos de inércia
Systemmeldungen 05.03.01 pt 107 de 322
Mensagens de sistema
SOBRECARGA ESTÁTICA EM %2 DO TORQUE DO MOTOR
1158 <Número do eixo> <Valor em %>
O torque do motor máx. permitido no eixo identificado é ultrapassado
Causa
estaticamente no valor % indicado.
Efeito Parada do interpretador.
Verificar dados de carga:
-- Massa
Solução
-- Centro de gravidade
-- Momentos de inércia
ERRO INTERNO NO PLANEAMENTO DA TRAJECTÓRIA PTP
1159 <Número>
Causa Erro no planejamento do perfil de movimento PTP.
Efeito Parada do interpretador.
Modificar os dados de perfil (fator de arredondamento, velocidade, acele-
Solução
ração).
1160 TRACE: TEMPO DE GRAVAÇÃO MUITO EXTENSO
O tempo de gravação configurado em “TRACE.DEF” é muito longo.
Causa
Não há espaço de memória disponível suficiente para a gravação.
Efeito TRACE não será gravado.
Reduzir de modo correspondente o tempo de gravação de TRACE.
Solução
Reduzir a quantidade de canais a serem gravados.
1161 Confirmar supervisionamento da velocidade real <Número do eixo>
Mensagem subseqüente à mensagem de estado “Velocidade real <Eixo>
Causa
Supervisionamento”.
Solução Confirmar mensagem.
1162 Comando do freio individual para eixos adicionais não está ativado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
108 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1163 Acoplamento de eixos não é possível (--> atribuição canal DSE/PM)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1164 Processo de acoplamento ativo
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1165 Erro ao acoplar
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1166 Erro ao desacoplar
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1167 <Número do eixo> eixo adicional desacoplado, AJOG não permitido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1168 <Número do eixo> eixo adicional desacoplado, MOVE não permitido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 109 de 322
Mensagens de sistema
1169 <Número do eixo> eixo adicional desacoplado, AJUSTE não permitido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1170 Instrução ASYPTP contém eixo(s) adicional(is) desacoplado(s)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1171 Valor para $ASYNC_AXIS contém eixos adicionais desacoplados
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1172 Valor não pode ser alterado enquanto o programa estiver selecionado
Causa O valor não pode ser alterado com o programa selecionado.
Solução Cancelar programa.
1173 Conf.: Aviso de desvio master--slave <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Aviso de desvio mas-
Causa
ter--slave <...>”.
Efeito Nenhum.
Solução Confirmar mensagem.
110 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1174 Conf.: aviso de desvio master--slave <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Alarme de desvio
Causa
master--slave <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1175 Conf.: desvio master--slave <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Desvio crítico master--
Causa
slave <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1176 Conf.: desvio velocidade master--slave <Número do eixo>
Mensagem subseqüente à mensagem de estado: “Desvio velocidade
Causa
master--slave <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1177 IBS <...> master: falha de periferia número de participantes <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1178 IBS <...> master: erro de bus número de participante <...> (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 111 de 322
Mensagens de sistema
1179 IBS <...> master: erro de bus (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
IBS <...> master: erro de configuração número de participante <...>
1180 (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1181 IBS <...> master: erro de configuração (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1182 IBS <...> master: erro ao abrir ficheiro <...>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1183 IBS <...> master: bit <...> é o bit OK master local
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1184 IBS <...> master: o watchdog terminou
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
112 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
IBS <...>: Foram projetados demasidados bytes de entrada na IO-
1185 SYS.INI
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
IBS <...>: Foram projetados demasiados bytes de saída na IO-
1186 SYS.INI
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1187 IBS <...>: Bus ainda está ativo, não é possível fazer novo arranque
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1188 IBS <...> master: erro ao ligar o segmento <...> (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1189 IBS <...> master: erro ao desligar segmento <...> (<>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
IBS <...> slave: Não é possível ativar a parte de slave da placa de
1190 conexão
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 113 de 322
Mensagens de sistema
1191 <> <> <>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
INTERLIGAÇÃO E/S: SAÍDA <Número da saída> PROTEGIDA
1192 CONTRA A ESCRITA
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir a interligação.
INTERLIGAÇÃO E/S: SAÍDA <Número da saída> PROTEGIDA CON-
1193 TRA A ESCRITA NO MÓDULO <Nome do módulo> FRASE <Número
de passo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1194 Trace Puffer vazio, iniciar interpretação para trás
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1200 CONF. EMERGÊNCIA
Causa Mensagem subseqüente à mensagem de estado “EMERGÊNCIA”.
Efeito Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1201 CONF. SUBSTIT. DE BATERIA <Número do módulo de potência>
Causa A bateria foi substituída.
Solução Confirmar a mensagem por meio do softkey »Quitt«.
114 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1202 CONF. FALHA DE IMPULSO <Número RDW>
Mensagem subseqüente à mensagem de estado “RDW <Número do
Causa
eixo> não inicializa.”
Solução Confirmar mensagem.
1203 CONF. FALHA CODIF. MUDANÇA DE DIRECÇÃO <Número DSE>
Mensagem subseqüente à mensagem de estado “FALHA CODIF. MU-
DANÇA DE SENTIDO <Número DSE>”
Causa
O sistema base não recebeu a mensagem de resposta DSEREADY
após a inicialização do programa DSE.
Efeito Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução Verificar se a DSE está bem encaixada.
Substituir a DSE.
1204 CONF. DEFEITO CABO DO CODIF. <Número do eixo>
Mensagem subseqüente à mensagem de estado “FALHA CABO DO CO-
Causa
DIF.”.
Parada sobre a trajetória.
Efeito Saída “$ALARM_STOP” sinal 0.
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 115 de 322
Mensagens de sistema
1205 CONF. CONJ. DE CODIF./ FALHA DE LÂMPADA <Número do eixo>
Mensagem subseqüente à mensagem de estado “CONJUNÇÃO CODIF.
Causa / AVARIA LÂMPADA <Número do eixo>”.
DSE não recebeu nenhum avanço do sistema base para este eixo.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” apresenta nível de sinal 0.
Confirmar mensagem.
Verificar a conexão de encaixe entre DSE e MFC, bem como entre MFC
Solução
e a placa mãe (mau contato).
Se isso não trouxer nenhuma melhoria, então substituir DSE ou MFC.
1206 CONF. CODIFICADOR SUJO <Número do eixo>
Mensagem subseqüente à mensagem de estado “CODIF. SUJO <Nú-
mero do eixo>”.
Causa Mensagem do sistema base:
O sistema base não ativou o temporizador watchdog para o supervisio-
namento da comunicação com a DSE, ou a DSE não resetou o tempori-
zador watchdog.
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” apresenta nível de sinal 0.
Confirmar mensagem.
Verificar o perfeito contato na conexão de encaixe entre DSE e MFC,
bem como entre MFC e a placa mãe (mau contato).
Solução
Se isso não trouxer nenhuma melhoria, então substituir DSE ou MFC.
Averiguar se o bus de acionamento ou o bus ISA na placa mãe está sob
interferência (CEM).
116 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
CONFIRMAR ERRO DE TRANSMISSÃO VALOR ABSOLUTO /
1207 TRANSMISSÃO <Número DSE> DSE -- RDW
Mensagem subseqüente à mensagem de estado “FALHA CODIF.
TRANSM. VALOR ABSOLUTO <Número DSE>. DSE--RDW”.
Causa Cabo ou conexão de encaixe danificada entre DSE e RDW.
O cabo não está conectado, ou está mal conectado.
Falha na transmissão de dados entre DSE e RDW.
Frenagem dinâmica.
Efeito Travamento de todos os comandos ativos.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Confirmar mensagem.
Verificar a alimentação de tensão de DSE e RDW (LEDs).
Solução Verificar o cabo (blindagem!) e conexões de encaixe.
Verificar a interface serial DSE -- RDW.
Verificar a conexão à massa do robô e do armário.
1208 CONF. REALIZAR AJUSTE <Número do eixo>
Causa Mensagem subseqüente à mensagem de estado “Realizar ajuste”.
Efeito Travamento de todos os comandos ativos.
Efetuar um ajuste.
Solução
Confirmar mensagem.
1209 CONF. LIBERTAÇÃO GERAL DE REGULAD.
Causa Entrada “$SERVO_RDY” tinha sinal 0.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 117 de 322
Mensagens de sistema
1210 CONF. LIBERTAÇÃO GERAL DE MOVIMENTO
Causa Entrada “$MOVE_ENABLE” tinha sinal 0.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
STOP devido ao interruptor de fim de curso <Direção de deslo-
1211 cação> <Número do eixo>
Um valor nominal do interruptor de fim de curso do software foi ultrapas-
Causa
sado.
Efeito Stop do gerador.
Confirmar mensagem.
Solução
Deslocar o robô na direção contrária.
1212 CONF. PROTECÇÃO OPERADOR
No modo de operação AUTOMÁTICO ou EXTERNO, a entrada do adap-
Causa
tador “$USER_SAF” tinha o estado de sinal “0”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1213 CONF. STOP PASSIVO <CMR ou UMP>
Causa Disparado por uma parada passiva.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
118 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1214 FALHA DE TENSÃO
A tensão de alimentação para o armário de comando foi desligada.
Causa
Queda de tensão na rede de alimentação.
Parada sobre a trajetória.
Buffering dos dados de ajuste.
Efeito
Salvar dados em HDD.
Travamento de todos os comandos ativos.
Caso não tenha ocorrido um desligamento manual ou queda da alimenta-
Solução
ção de tensão, verificar a tensão da rede.
1215 <Nome da instrução> <Ação>
Causa Execução do comando OBJH concluída.
CONF. ERRO DE ACIONAMENTO <Número do eixo> Nº <Número do
1216 erro>
Mensagem subseqüente à mensagem de estado”Erro de acionamento
Causa
<Número do eixo> Nº <...>”.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução Após a confirmação o robô pode prosseguir o movimento até a próxima
mensagem.
1217 CONF. SBX -- ENTRADA UMP ENCAIX.
Causa Safetybox notifica erro na entrada do sinal “UMP encaixada”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 119 de 322
Mensagens de sistema
1218 QUIT SBX -- PHG ORTSF.EING.
Causa Safetybox notifica erro na seção de entrada da entrada fixa local.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1219 CONF. SBX -- UMP ENCAIXADA
Na análise via software do sinal “UMP encaixada” foi detectado, que am-
Causa bos os canais (interface MPC e Safetybox) possuem um estado dife-
rente.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1220 CONF. PARAGEM EMERG. POR AJUSTE DE CODIFICADOR
Causa Acionamento do softkey de ajuste de rotação.
Parada sobre a trajetória.
Efeito Travamento de todos os comandos ativos.
Saída “$ALARM_STOP” recebe sinal 0.
Solução Pressionar duas vezes a tecla Recall.
CONFIRMAR MÓDULO DE POTÊNCIA <Número do eixo> MAL LI-
1221 GADO OU NÃO LIGADO
Mensagem subseqüente à mensagem de estado “Módulo de potência do
Causa
eixo <Número do eixo> está mal / não encaixado”.
Solução Confirmar mensagem.
120 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1222 CONFIRMAR FALHA DO FREIO <Número do eixo>
Mensagem subseqüente à mensagem de estado “Falha do freio <Nú-
Causa
mero do eixo>”.
Solução Confirmar mensagem.
1223 CONFIRMAR BAIXA TENSÃO <Número do módulo de potência>
Mensagem subseqüente à mensagem de estado “QUEBRA TENSÃO
Causa
<Módulo de potência>”.
Solução Confirmar mensagem.
1224 CONFIRMAR SOBRETENSÃO <Número do módulo de potência>
Mensagem subseqüente à mensagem de estado “SOBRETENSÃO <Mó-
Causa
dulo de potência>”.
Solução Confirmar mensagem.
1225 CONFIRMAR SOBRECORRENTE <Número do eixo>
Mensagem subseqüente à mensagem de estado “Sobretensão <Número
Causa
do eixo>”.
Solução Confirmar mensagem.
1226 CONFIRMAR FECHO E<2 ou 7> FECHADO
Mensagem subseqüente à mensagem de estado “E <Fecho 2 ou 7.>
Causa
fechamento fechado”.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 121 de 322
Mensagens de sistema
1227 CONFIRMAR FECHO E<2 ou 7> ABERTO
Mensagem subseqüente à mensagem de estado “E <Fecho 2 ou 7.>
Causa
fechamento aberto”.
Solução Confirmar mensagem.
CONFIRMAR RESISTÊNCIA DE CARGA <Número do eixo> MUITO
1228 TEMPO LIGADO
Causa A energia do eixo freado estava acima do limite.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar o módulo de potência da resistência de lastro e substituir, se for
necessário.
Solução
Ajustar a rampa de frenagem menos íngreme.
Confirmar mensagem.
CONFIRMAR WATCHDOG MÓDULO DE POTÊNCIA <Número do
1229 módulo de potência>
Watchdog do módulo de potência foi desativado (o disparo através da
Causa
DSE ocorre no intervalo de 0,125 ms)
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Verificar a DSE.
Solução Verificar o módulo de potência.
Confirmar mensagem.
CONFIRMAR SOBRETEMPERATURA RESISTÊNCIA DE CARGA
1230 <Número do módulo de potência>
Mensagem subseqüente à mensagem “Sobretemperatura resistência de
Causa
carga ...”.
Solução Confirmar mensagem.
122 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
CONFIRMAR SOBRETEMPERATURA ARMÁRIO <Número do
1231 módulo de potência>
Mensagem subseqüente à mensagem de estado “Temperatura do armá-
Causa
rio muito alta”.
Solução Confirmar mensagem.
1232 CONFIRMAR CABO DE MOTOR <Número do eixo>
Causa Mensagem subseqüente à mensagem de estado “CABO DO MOTOR”.
Solução Confirmar mensagem.
CONF. ERRO DE SENSOR TEMPERATURA DISSIPADOR DE CALOR
1233 <Número do eixo>
Mensagem subseqüente à mensagem de estado “ERRO DE SENSOR
Causa
TEMPERATURA DISSIPADOR DE CALOR”.
Solução Confirmar mensagem.
CONF. ERRO DE SENSOR TEMPERATURA ESPAÇO INTERIOR
1234 <Número do eixo>
Mensagem subseqüente à mensagem de estado “ERRO DE SENSOR
Causa
TEMPERATURA ESPAÇO INTERIOR”.
Solução Confirmar mensagem.
CONF. CONJUNTO DE PARÂMETROS DE ACIONAMENTO ERRADO
1235 <Número do eixo>
Mensagem subseqüente à mensagem de estado “CONJUNTO DE
Causa
PARÂMETROS DE ACIONAMENTO ERRADO”.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 123 de 322
Mensagens de sistema
CONF. ERRO DE SENSOR TEMPERATURA DE MOTOR <Número do
1236 eixo>
Mensagem subseqüente à mensagem de estado “ERRO NO SENSOR
Causa
DE TEMPERATURA DO MOTOR”.
Solução Confirmar mensagem.
CONF. ERRO DE PARÂMETRO <Número do eixo> <Número do con-
1237 junto de parâmetros>
Mensagem subseqüente à mensagem de estado “ERRO DE PARÂME-
Causa
TRO”.
Solução Confirmar mensagem.
CONF. ERRO SINC. ENTRADA MÓDULO DE ACIONAMENTO
1238 <Número do eixo>
Mensagem subseqüente à mensagem de estado “ERRO SINCRONI-
Causa
ZAÇÃO. ENTRADA DO MÓDULO DE ACIONAMENTO”.
Solução Confirmar mensagem.
CONF. ERRO SINCRONIZAÇÃO MÓDULO DE ACIONAMENTO
1239 <Número do eixo>
Mensagem subseqüente à mensagem de estado “ERRO SINCRONI-
Causa
ZAÇÃO MÓDULO DE ACIONAMENTO”.
Solução Confirmar mensagem.
1240 CONF. <Número do eixo> SEM TENSÃO DE POTÊNCIA
Mensagem subseqüente à mensagem de estado “... SEM TENSÃO DE
Causa
POTÊNCIA”.
Solução Confirmar mensagem.
124 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Quit supervisionamento i*i--t, carga de corrente do cabo do motor
1241 <Número do eixo> passado <Tempo> s 100 %
Mensagem subseqüente à mensagem de estado “SUPERVISIONA-
Causa
MENTO I*I--T, CARGA DE CORRENTE DO CABO DO MOTOR ...”.
Solução Confirmar mensagem.
Quit supervisionamento i*i--t, carga de corrente do cabo do motor
1242 <Número do eixo> passado <Tempo> s 95 %
Mensagem subseqüente à mensagem de estado “Supervisionamento
Causa
i*i--t, carga de corrente do cabo do motor ...”. 95 %”.
Solução Confirmar mensagem.
Linha <Número da linha> em <Nome do módulo> muito comprida.
1243 Linha foi cortada
Uma linha de programa muito longa foi cortada, para evitar a perda do
Causa
conteúdo do programa restante.
Efeito A linha é cortada. O arquivo de programa é mantido.
Solução Corrigir a linha danificada, em modo perito, de forma correspondente.
Parâmetros de servo <”normais” ou “de configuração”> <Número
1244 do eixo> carregamento bem sucedido
Causa Processo de leitura dos parâmetros concluído com sucesso.
Efeito Nenhum.
Solução Confirmar mensagem.
1245 Quit Falha do bus de acionamento DSE <Número DSE>
Mensagem subseqüente à mensagem de estado “Falha do bus de acio-
Causa
namento DSE ...
Efeito O bus de acionamento funciona novamente.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 125 de 322
Mensagens de sistema
Quit Servo bus alterado DSE <Número DSE>, memorização e salva-
1246 guarda de dados impossível
Quit Servo bus alterado DSE ..., memorização e salvaguarda de dados
Causa
impossível.
Solução Confirmar mensagem.
1247 Quit falha do bus de acionamento para <Número do eixo>
Mensagem subseqüente à mensagem de estado “Falha do bus de acio-
Causa
namento para ...
Solução Confirmar mensagem.
1248 Quit falha do bus de acionamento para <Número do KPS>
Mensagem subseqüente à mensagem de estado “Falha do bus de acio-
Causa
namento para ...
Solução Confirmar mensagem.
Confirmar interruptor de realimentação demasiado longo em
1249 <Número do KPS> durante o carregamento
Mensagem subseqüente à mensagem de estado “Comutador de reali-
Causa
mentação demasiado longo em ... durante o carregamento”.
Solução Confirmar mensagem.
1250 Confirmar alta tensão <Número do KPS> durante o carregamento
Mensagem subseqüente à mensagem de estado “Excesso de tensão
Causa
<...> durante o carregamento”.
Stop do gerador.
Efeito
Travamento dos comandos ativos.
Solução Confirmar mensagem.
126 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1251 Confirmar acumulador <Número do KPS>
Mensagem subseqüente à mensagem de estado “Verificar acumulador
Causa
<...>”.
Efeito Nenhum.
Solução Confirmar mensagem.
Confirmar baixa voltagem <Número do KPS> durante o
1252 carregamento
Mensagem subseqüente à mensagem de estado “Baixa tensão <...> du-
Causa
rante o carregamento”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Confirmar erro de travagem <Número do KPS> canal <Canal de
1253 frenagem>
Mensagem subseqüente à mensagem de estado “Erro do travão
Causa
<...>”.canal <...>”.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1254 Confirmar erro do ventilador do PC
Mensagem subseqüente à mensagem de estado “Erro do ventilador do
Causa
PC”.
Efeito Nenhum.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 127 de 322
Mensagens de sistema
Confirmar Ixt servo drive <Número do eixo> excedeu o valor <Valor
1255 I*I*t> %
Mensagem subseqüente à mensagem de estado “Ixt servo drive <Nú-
Causa
mero do eixo> excedeu o valor <especificação de valor>%”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1256 CONFIRMAR FECHAR PORTA DO ARMÁRIO DE COMANDO
Mensagem subseqüente à mensagem de estado “Fechar porta do armá-
Causa
rio de comando”.
Efeito Nenhum.
Solução Confirmar mensagem.
1257 CONFIRMAR: erro POST: erro FPGA <Número do acionamento>
Mensagem subseqüente à mensagem de estado “Erro Post: Erro FPGA
Causa
<Módulo de potência>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
CONFIRMAR: estado inesperado das saídas <Número do módulo
1258 de potência>
Mensagem subseqüente à mensagem de estado “Estado inesperado das
Causa
saídas <...>”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
128 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
CONFIRMAR: número de modelo errado <Número do módulo de
1259 potência>
Mensagem subseqüente à mensagem de estado “Número de modelo
Causa
errado”.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1300 ERRO DE PARIDADE
Causa Ajuste errado de paridade.
Verificar o ajuste de paridade na unidade de comando e no aparelho de
Solução
operação (PC) e corrigir.
1301 ERRO DE PROCEDIMENTO
Erro de transmissão no procedimento LSV2, que não foi detectado pelo
Causa
supervisionamento de paridade.
Repetir transmissão.
Solução Aumentar o contador de repetição de procedimento.
Verificar o cabo.
1302 CANAL NÃO COMUNICADO
Causa Tempo de supervisionamento de procedimento esgotado.
Solução Aumentar o tempo de supervisionamento de procedimento.
1303 EXCESSO SCC
A taxa Baud está ajustada muito alta (SCC = Serial Communication Con-
Causa
troller).
Solução Reduzir a taxa Baud.
Systemmeldungen 05.03.01 pt 129 de 322
Mensagens de sistema
1304 REFERÊNCIA EIXO <Número do eixo> INVÁLIDA
Causa Um eixo não incremental deve ser referenciado.
Efeito O eixo selecionado não é referenciado.
Solução Ajustar o eixo.
1305 POS. COMUTAÇÃO CMR INVÁLIDA
Foram iniciados processos de transmissão em excesso.
Causa
Podem ser iniciados no máximo 4 processos de transmissão.
Aguardar até que um processo seja concluído.
Solução
Interromper um processo em andamento.
1306 SISTEMA NÃO PREPARADO PARA A OPERAR
O cabo de conexão está com defeito ou não está encaixado.
Causa
Dispositivo (p. ex., impressora) está desligado ou com defeito.
Solução Verificar o cabo de conexão e o dispositivo.
1307 ERRO DE FORMATO
Causa Erro de hardware da interface na I--CPU.
Em caso de repetidas ocorrências do erro, trocar o módulo (interface--
Solução
CPU).
1308 CANAL NÃO PERMITIDO NO COMANDO
Causa O comando não suporta canais.
Efeito O comando não é executado.
Solução Nenhuma.
130 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1309 OBJECTO AUSENTE
Causa Os objetos que não estão presentes na KRC, não podem ser ativados.
Efeito O comando não é executado.
Solução Selecionar o objeto correto.
1310 DEMASIADOS OBJECTOS SELECCIONADOS
Foram selecionados objetos em excesso.
Causa
Número permitido de objetos selecionados: aprox. 150
Efeito O comando não é executado.
Solução Reduzir o número de objetos para o número máximo permitido.
1311 <Nome de objeto> CÓPIA INCORRECTA <Número de passo>
Causa Foram verificados erros na análise da linha.
Efeito Erro Token no objeto.
Solução Corrigir o objeto de modo correspondente.
1312 <Nome de objeto> OCUPADO
O objeto já está ocupado e por isso não pode mais ser processado.
Causa Não é possível vincular o módulo, pois no mínimo um objeto deste mó-
dulo está ocupado.
Efeito O comando não é executado.
Solução Nenhuma.
1313 INDICACÕES ERRADAS
Causa As especificações de fonte e destino em “COPY” não são compatíveis.
Efeito O comando não é executado.
Solução Indicar fonte e destino corretamente.
Systemmeldungen 05.03.01 pt 131 de 322
Mensagens de sistema
1314 INDICAÇÕES NÃO PERMITIDAS
Extensão incompatível.
Causa Foi utilizada a instrução “COPY *.*”.
A instrução “COPY *.*” é permitida apenas em um diretório.
Efeito O comando não é processado.
Solução Indicar a extensão correta.
1315 <Nome do módulo> NÃO E UM MODULO
Causa O nome especificado refere--se a um diretório.
Efeito O comando não é processado.
Solução Utilizar nome de módulo.
1316 Dados de andamento não permitidos com trigger na UP
Em um subprograma é definido um trigger que eventualmente só comuta
no programa principal.
Causa
Caso na atribuição do trigger sejam utilizados dados de andamento, no
momento da comutação estes são inválidos.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução Utilizar variáveis globais.
Confirmar mensagem.
1317 Os ficheiros de sistema não podem ser apagados!
Causa Houve uma tentativa de apagar um arquivo de sistema.
132 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1318 DESCRIÇÃO DO OBJECTO NÃO AVALIAVEL
Durante “COPY” externo foi recebida uma informação de módulo não
Causa
interpretável.
Efeito O comando não é processado.
Solução Verificar o software da interface.
1319 <Nome de objeto> INCORRIGÍVEL
Foi especificada uma extensão errada em objetos.
Causa
Em objetos é permitida apenas a extensão “DAT”.
Efeito O comando não é executado.
Selecionar lista de dados.
Solução
Colocar o comutador INIT na I--CPU na pos. 3.
1320 EXTENSÃO NÃO PERMITIDA
Em uma instrução foi especificada uma extensão de modo não permitido
Causa
(p. ex., “analyse otto.src”).
Efeito O comando não é processado.
Solução Corrigir a instrução de modo correspondente.
1321 <Caminho> NÃO E UMA DIRETORIA
O comando contém um subdiretório.
Causa A especificação de um subdiretório, p.ex. “dir /R1/otto/abc”, não é permi-
tida.
Efeito O comando não é processado.
Solução Corrigir o comando de modo correspondente.
1322 <Módulo> SEM LINK
Causa ”UNLINK” para um objeto que não é um programa.
Efeito O comando não é processado.
Solução Nenhuma.
Systemmeldungen 05.03.01 pt 133 de 322
Mensagens de sistema
1323 INDICAÇÃO <Caminho> NÃO PERMITIDA
Causa Foi especificado um caminho, nome de módulo ou extensão errada.
Efeito O comando não é processado.
Solução Corrigir o comando de modo correspondente.
1324 <Objeto> INEXISTENTE
Causa Um objeto inexistente foi ativado.
Efeito O comando não é processado.
Corrigir o comando de modo correspondente.
Solução
Criar o objeto.
1325 <Objeto> NÃO ELABORÁVEL
Causa Um objeto já ocupado foi ativado.
Efeito O comando não é processado.
Solução Liberar a atribuição (/R1/CONFIG.DAT).
1326 <Objeto> : <Número de erros> erro durante a análise
Na análise total foi detectada a quantidade de erros informada no objeto
Causa
indicado.
Efeito O comando não é processado.
Solução Corrigir os erros.
1327 <Módulo> ERRO NO LINK
Causa Durante a vinculação do módulo indicado foi detectado um ou mais erros.
Efeito O comando não é executado.
Solução Corrigir o/s erro/s com base na lista de erros.
134 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1328 OBJECTO NÃO CORRECTO
Causa O objeto não está correto para o cálculo TTS.
Efeito Nenhum.
Solução Corrigir o objeto de modo correspondente.
1329 ACESSO IMPOSSÍVEL A VARIAVEL IMPORTADA
Causa O caminho de busca não foi ampliado para a lista de dados externa.
Efeito O comando não é processado.
Solução Ampliar o caminho de busca de modo correspondente.
1330 OBJECTOS DE ORIGEM E DE DESTINO IDÊNTICOS
Causa As especificações de fonte e destino descrevem o mesmo objeto.
Efeito O comando não é processado.
Solução Alterar o objeto de destino.
1331 <Módulo> INCORRETO
Causa Na vinculação foi selecionado um módulo incorreto.
Efeito O comando não é executado.
Solução Eliminar o erro no módulo indicado.
1332 RESET NECESS. DEVIDO A SELEC. DE PASSO
Causa Seleção de passo em um programa Interrupt.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Executar um Reset.
1333 <Objeto> NÃO PODE SER APAGADO
Causa Este objeto não pode ser apagado, pois está protegido contra gravação.
Efeito O comando não é executado.
Solução Nenhuma.
Systemmeldungen 05.03.01 pt 135 de 322
Mensagens de sistema
1334 MAIS DE 16 INTERRUPÇÕES DEFINIDAS
Foram definidos mais de 16 Interrupts. A instrução do programa “INTER-
Causa
RUPT ON” não pode ligar mais do que 16 Interrupts definidos .
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir o número de Interrupts ativos.
1335 <Módulo> SELECCIONADO
O programa não pode ser integrado; o módulo está com “RUN” selecio-
Causa
nado .
Efeito O comando não é executado.
Solução Cancelar a execução do programa (CANCEL).
1336 COR SÓ EM LISTAS DE DADOS
Foi utilizado o comando “COR” em uma lista de dados não selecionada.
Causa
O comando “COR” é permitido apenas em listas de dados.
Efeito O comando não é processado.
Solução Selecionar a respectiva lista de dados.
1337 INDICACÕES DEMASIADO COMPLEXAS
Causa Copiar de um canal para outro. Isso não é permitido em SWP1.
Efeito O comando não é processado.
1338 PASSO NÃO CORRIGÍVEL
Os cálculos TTS ou BASE não podem ser executados.
Causa
TTS = triedro acoplado à ferramenta que acompanha a trajetória
Efeito Nenhum.
MENSAGEM EXTERNA DESCONHECIDA <Número de mensagem
1339 externo>
Uma mensagem externa (p. ex.,da Interface--CPU, PSX) não pôde ser
Causa
convertida em uma mensagem RCX.
Solução Confirmar mensagem.
136 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1340 SISTEMA DE REFERÊNCIA NÃO PERMITIDO
O sistema de referência para movimentação manual para esta cinemá-
tica não é permitido.
Causa
A consulta é executada quando são acionadas as teclas Iniciar e teclas
direcionais.
Solução Comutar o sistema de referência (TRANSSYS).
1341 DEFINIÇÃO INCOMPLETA DO SISTEMA DE REF.
No mínimo um Frame, necessário para o cálculo da matriz de referência,
Causa
ainda não foi atribuído.
Solução Executar a atribuição de forma correspondente.
1342 ERRO CAMPO DE TRABALHO
Causa O limite do campo de trabalho foi ultrapassado.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1343 ACTIVAÇÃO SYNC() NÃO PROGRAMADA !
Em IRSTOPMESS o usuário não reagiu à $Power--Fail com a chamada
Causa da função SYNC() .
A consulta é realizada em caso de uma queda de tensão.
Efeito Nenhum.
Solução Corrigir o programa do usuário de modo correspondente.
Systemmeldungen 05.03.01 pt 137 de 322
Mensagens de sistema
1344 SISTEMA DE ROBÔ NÃO EXISTENTE
Não foi ativado um sistema de robôs nos dados da máquina (Comando:
Causa $HOME = ’/R2’).
A consulta é feita no processamento de comandos e de programas.
No processamento de comandos:--comando não é processado.
Efeito No processamento de programas:--frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar de forma correspondente os dados da máquina.
Solução
Confirmar mensagem.
1345 MUDAR SENTIDO DE REFERÊNCIA <Número do eixo>
No referenciamento dos eixos individuais foi acionada a tecla direcional
Causa
errada, dependendo da data da máquina “$DIR_CAL”.
Efeito O eixo não pode ser referenciado neste sentido.
Solução Referenciar no outro sentido.
1346 SEQUÊNCIA DE REFERÊNCIA NÃO PERMITIDA
A sequência de referência não foi cumprida; dependendo da data da má-
Causa
quina “$SEQ_CAL”.
Efeito O eixo não pode ser referenciado.
Solução Cumprir a sequência de referência.
1347 SISTEMA DO ROBÔ NÃO SINCRONIZADO
Seleção de um programa com robô não ajustado.
Causa Inicialização de um programa com robô não ajustado.
A consulta é feita no processamento de comandos e de programas.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Ajustar o robô.
Solução
Confirmar mensagem.
138 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1348 <Número do eixo> EIXO SINCRONIZADO
No referenciamento dos eixos individuais pretendia--se referenciar nova-
Causa
mente um eixo já referenciado.
Efeito O eixo não é referenciado.
Solução Selecionar o próximo eixo ainda não referenciado.
1349 ROBÔ SINCRONIZADO
Todos os eixos estão ajustados.
Causa A consulta se os eixos estão ajustados é realizada durante o processo
de ajuste.
Sincronizar o robô.
Efeito
Consulta: cíclica.
Se os eixos devem ser reajustados, é necessário executar um desajuste
Solução
prévio.
1350 SAK ATINGIDA
Trajetória programada alcançada.
Causa Após reposicionamento ($POS_RET, $AXIS_RET, $POS_FOR,
$AXIS_FOR, etc.).
Sinalização de que o SAK foi executado.
Efeito Em seguida a execução do programa pode iniciar a partir da posição
atingida.
1351 INTERRUPÇÃO DA COMPENSAÇÃO DE DERIVA
A compensação de deriva foi interrompida por uma parada (acionamento
Causa
da tecla Stop, mensagem com disparo de parada).
A compensação de deriva falhou.
Efeito
Frenagem dinâmica.
Solução Repetir a compensação de deriva.
Systemmeldungen 05.03.01 pt 139 de 322
Mensagens de sistema
1352 <Número do eixo> EIXO BLOQUEADO
Houve uma tentativa de mover um eixo no sentido bloqueado (bloqueado
Causa
pelo interruptor de fim de curso do software).
Efeito O comando não é processado.
Solução Liberar o eixo no outro sentido.
1353 COMBINAÇÃO DE TECLAS NÃO PERMITIDA <KCP>
Causa No KCP foram pressionadas várias teclas ao mesmo tempo.
Efeito A operação do KCP é interrompida momentaneamente.
Solução Soltar as teclas no KCP.
1354 Múltiplas teclas pressionadas <UMP>
Causa No KCP foram pressionadas várias teclas ao mesmo tempo.
Efeito A operação do KCP é interrompida momentaneamente.
Solução Soltar as teclas no KCP.
1355 COMUTADOR DE HOMEM MORTO NECESSÁRIO
O comutador de homem morto não foi pressionado.
No KCP foram pressionadas várias teclas ao mesmo tempo. No modo de
Causa operação T1 ou T2, ao acionar as teclas de partida (para frente [+] e
para trás [--]) ou uma tecla direcional, é necessário pressionar adicional-
mente um dos comutadores de homem morto no lado traseiro do KCP.
Efeito O comando não é processado.
Solução Pressionar o comutador de homem morto.
140 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1356 Tecla de arranque necessária
A execução do comando exige a tecla de partida.
Causa
O comando “Partida” foi introduzido como texto.
Efeito O robô fica parado.
Pressionar a tecla de partida.
Solução
Em caso de computador externo: Verificar a identificação da tarefa.
1357 RESET NECESSÁRIO
RUN está no estado de finalização de um processo.
Causa A consulta é feita em caso do processamento de um comando e de um
programa.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Resetar o programa com RESET.
Solução No processamento de programa é necessário que a mensagem seja
confirmada.
1358 SELECÇÃO NECESSÁRIA
A tecla de partida foi pressionada, apesar de não haver nenhum pro-
grama selecionado.
Causa
”RUN” sem a especificação do caminho e nenhum programa selecio-
nado.
Efeito O comando não é processado.
Solução Selecionar programa.
1359 TTS NÃO DETECTÁVEL
Cancelamento durante a busca do ponto de direção da trajetória.
Causa
TTS = triedro acoplado à ferramenta que acompanha a trajetória
Efeito Nenhum.
Systemmeldungen 05.03.01 pt 141 de 322
Mensagens de sistema
1360 SELECÇÃO NÃO PERMITIDA
Causa O passo não existe no programa.
Efeito O comando não é processado.
Solução Selecionar o número correto do passo.
1361 STOP POR COMUTAÇÃO NA ORIGEM
Durante o acionamento de uma tecla direcional ou execução foi alterado
Causa
o ajuste Home.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1362 STOP POR MUDANÇA DE MODO DE OPERAÇÃO
O modo de operação foi alterado.
Causa Em uma mudança de modo de operação, todos os processos ativos são
paralisados.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1363 CONSOLA BLOQUEADA
O comando não pode ser executado, visto que os ajustes no KCP não
cumprem as condições.
Causa Para CMR e KCP local fixo é necessário o modo de operação “AUT”.
Para KCP sem local fixo é necessário o modo de operação “T1” ou “T2”.
Para computador central é necessário o modo de operação “EXT”.
Efeito O comando não é executado.
Solução Criar condições ativas.
142 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1364 Parâmetros OUT não permitidos.
Em caso de Trigger com chamada de subprograma é transferido o parâ-
Causa
metro de referência.
Corrigir o programa.
Solução
Confirmar mensagem.
1365 Trigger da path não permitido com PTP.
Trigger da path não permitido com PTP.
Causa
Trigger da path não são permitidos com PTP.
Efeito Travamento de todos os comandos ativos.
Corrigir o programa.
Solução Confirmar mensagem.
Reinicializar o programa.
1366 Indicação cartesiana do ponto de destino náo é possível.
Foi programado um movimento PTP com especificação cartesiana do
ponto de destino.
Causa Em robôs de 5 eixos ($DEF_A4FIX = TRUE) e modo de paletização des-
ativado ($PALMODE = FALSE) podem ser executados apenas movimen-
tos PTP com ponto de destino específico do eixo.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Corrigir o programa.
Solução
Confirmar mensagem.
1367 Estado ACTIVO necessário
O comando introduzido pode ser emitido somente pelo aparelho de ope-
Causa
ração ativo (modo de operação T1, T2, AUT).
Efeito O comando não é executado.
Solução Ativar o aparelho de operação.
Systemmeldungen 05.03.01 pt 143 de 322
Mensagens de sistema
1368 <Aparelho de operação> EM ESTADO ATIVO
Causa O aparelho de operação indicado está ativo.
Efeito O comando não é executado.
Solução Desativar o aparelho de operação indicado
1369 ACTIVO SOMENTE PERMITIDO EM <Modo de operação>
O modo de operação ajustado está errado.
Para CMR e KCP local fixo é necessário o modo de operação “AUT”.
Causa Em caso de KCP sem local fixo é necessário o modo de operação “T1”
ou “T2”.
Em caso de computadores centrais é necessário o modo de operação
“EXT”.
Efeito O comando não é executado.
Solução Ajustar o modo de operação correto.
1370 STOP PASSIVO
Parada a partir de um aparelho passivo. Esta mensagem é indicada so-
Causa
mente quando um processo ativo é parado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução AVISO:
Esta mensagem só pode ser confirmada pelo disparador, mesmo no es-
tado passivo.
1371 ACTIVAR STOP POR MODO PASSIVO
O aparelho de operação foi desativado durante o acionamento da tecla
Causa de partida ou tecla direcional em modo de operação T1, T2 ou no movi-
mento SAK.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Ativar o aparelho de operação.
Solução
Confirmar mensagem.
144 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1372 PROCESSO ATIVADO
Houve uma tentativa de iniciar um comando ativo durante um processo
Causa ativo.
A consulta é feita durante o processamento do comando e do programa.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Aguardar a conclusão do processamento.
Parar o processamento ativo.
Solução
No processamento de programa é necessário que a mensagem seja
confirmada.
1373 PROCESSO OCUPADO
O programa já está selecionado.
Causa
A consulta é feita durante o processamento do comando e do programa.
No processamento de comando: O comando não é executado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Cancelar o programa já selecionado.
Solução No processamento de programa é necessário que a mensagem seja
confirmada.
1374 PROCESSO BLOQUEADO
Todos os programas selecionados possuem o tipo de execução do pro-
Causa
grama “BLOCKED” ou um processo não bloqueado está concluído.
Efeito O comando não é executado.
Solução Alterar o tipo de execução do programa.
Systemmeldungen 05.03.01 pt 145 de 322
Mensagens de sistema
1375 COMANDO NÃO PERMITIDO
Causa O comando não é permitido ou é desconhecido.
Efeito Nenhum.
Solução Introduzir o comando correto.
1376 COMANDOS ATIVOS BLOQUEADOS
Está ativa uma mensagem que promove o travamento de dos comandos
Causa
ativos.
Efeito O comando não é executado.
Solução Confirmar as mensagens presentes na janela de mensagens.
1377 EXECUÇÃO DE COMANDOS NÃO LIBERTADOS
Causa Um comando anterior ainda está sendo processado.
Efeito O comando não é executado.
Cancelar o comando.
Solução
Aguardar até a conclusão do comando anterior.
1378 COMANDO NÃO ESTÁ EM ELABORAÇÃO
Causa O comando a ser cancelado já foi processado.
Efeito Nenhum.
1379 COMANDO INTERROMPIDO
O comando foi cancelado.
Causa Durante a edição o núcleo do Editor selecionou Cancelamento no painel,
antes da chamada do respectivo comando (ERASE, GET, FIND).
146 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1380 FUNDO OCUPADO POR <aparelho de operação>
O fundo está ocupado de modo exclusivo por um outro aparelho de ope-
Causa
ração.
Efeito O fundo não pode ser ocupado de modo exclusivo.
Anular a ocupação exclusiva do aparelho indicado.
Solução
Completar os dados no arquivo “$OPTION.DAT”.
1381 FUNDO OCUPADO
Causa Um comando já está sendo processado no fundo.
Efeito O comando não é processado.
Cancelar o comando.
Solução
Aguardar até que o comando atual esteja processado.
1382 INTERRUPÇÃO
Causa ”BREAK” foi repetido.
Efeito Nenhum.
1383 ... NÃO E TRANSFERÊNCIA DE MEMÓRIA
Ao gravar um bloco de dados (um arquivo recebido pela unidade de co-
mando ou um arquivo temporário disponibilizado pelo servidor) verifi-
Causa
cou--se que não há mais espaço suficiente na mídia de gravação (disco
rígido).
Efeito O arquivo atual que está sendo processado é apagado.
Solução Liberar espaço na mídia de gravação (apagar arquivos desnecessários).
1384 PARÂMETRO NÃO AVALIADO
Em um programa já selecionado foi executado um comando RUN com
Causa
parâmetros.
Efeito Os parâmetros não são mais avaliados.
Solução Cancelar o programa e selecionar novamente.
Systemmeldungen 05.03.01 pt 147 de 322
Mensagens de sistema
1385 ERRO DE PROTOCOLO
Erro no software de protocolo do aparelho de operação ou do aparelho
Causa
de emissão.
Efeito O comando é interrompido.
Solução Verificar o software de protocolo.
1386 Interrupt--UP: máx. 10 argumentos admissíveis
Causa Foram especificados mais de 10 argumentos.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir o número de argumentos para o número máximo permitido.
1387 VARIÁVEL DEMASIADO GRANDE
A variável especificada em “SHOW VAR” ou “SET INFO” é muito com-
Causa
plexa ou muito grande (p. ex., o campo é maior que a imagem na tela).
Efeito O comando não é processado.
Solução Dividir a solicitação em várias seções.
<Nome> variável protegida contra a escrita no módulo <Nome do
1388 ficheiro> frase <Número de passo>
Houve a tentativa de descrever uma variável protegida contra gravação
Causa
em um módulo de programa.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
1389 FALTA OPÇÃO <Nome da opção>
Causa A opção não foi registrada.
Efeito O comando não é processado.
Solução Registrar a opção.
148 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1390 ÂNGULO CIRCULAR NÃO CONSIDERADO
Efeito Nenhum.
1391 ACESSO A COMPONENTE NÃO PERMITIDO
Acesso não permitido a um componente do trace de avanço inicial e
Causa
avanço principal (p. ex., SHOW VAR $PRO_TRACE[5].NAME[2]).
Frenagem sobre a rampa.
Efeito
O comando não é executado.
1392 PROTEÇÃO DE ESCRITA POR ESTADO DO PROCESSO
Acesso de escrita a uma variável “$” em estado de processo não permi-
Causa
tido (ativo, inativo, RC--Ready).
Efeito O comando não é processado.
Solução Ajustar um estado de processo permitido.
1393 PROTEÇÃO DE ESCRITA POR ESTADO DA CONSOLA
Houve uma tentativa de escrever em uma variável “$” com um aparelho
Causa
de operação com ajuste de estado errado.
Efeito O comando não é processado.
Solução Definir o estado do aparelho de operação como”ativo”.
1394 PROTECÇÃO DE LEITURA POR ESTADO DO PROCESSO
Leitura de uma variável “$” em estado de processo não permitido (ativo,
Causa
inativo, RC--Ready).
Efeito O comando não é processado.
Solução Ajustar um estado de processo permitido.
Systemmeldungen 05.03.01 pt 149 de 322
Mensagens de sistema
1395 PROTECÇÃO DE LEITURA POR ESTADO DA CONSOLA
Houve uma tentativa de ler uma variável “$” com um aparelho de opera-
Causa
ção com ajuste de estado errado.
Efeito O comando não é processado.
Solução Definir o estado do aparelho de operação como”ativo”.
1396 PROGRAMA SEM LINK
Causa Seleção de um programa não vinculado.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Vincular programa.
Solução AVISO:
No processamento de programa é necessário que a mensagem seja
confirmada.
1397 Memória necessária para a lista de parâmetros muito grande
Os parâmetros de transferência do programa exigem muito espaço de
Causa
memória.
Efeito Stop do gerador.
Confirmar mensagem.
Solução Corrigir o parâmetro de modo correspondente.
Selecionar novamente o programa.
1398 CONTROLAR SELECTOR CMR
Na seleção ou inicialização a partir de outro aparelho de operação, o se-
Causa
letor no CMR não se encontra na posição “RUN”.
Efeito O comando não é processado.
Solução Colocar o seletor no CMR na posição “RUN”.
150 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1399 AVISO NÃO CONFIRMÁVEL
Causa Confirmação de uma mensagem de estado.
Efeito O comando não é executado.
Solução Nenhuma. Preste atenção na mensagem.
1400 AVISO INEXISTENTE
Causa Tentativa de confirmação textual de uma mensagem inexistente.
Efeito Não é possível executar o comando.
Solução Nenhuma.
ESTRUTURA DE CONTROLO PASSO SEGUINTE <número do
1401 passo>
Causa Seleção em uma estrutura de controle.
Frenagem sobre a rampa.
Efeito Travamento de todos os comandos ativos.
Saída da estrutura de controle com o reconhecimento do Fim.
Solução Confirmar mensagem.
1402 SELECCIONA ENTRADA EM SERVIÇO
Foi introduzido um comando que só é permitido no modo de entrada em
Causa
serviço.
Efeito O comando não é executado.
Selecionar o modo de entrada em serviço
Solução
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 151 de 322
Mensagens de sistema
1403 INTERRUPÇÃO INSTRUÇÃO DE INTERROMPER
Instrução de movimento em um programa de Interrupt que é processado
após uma parada por erro.
Causa
No módulo de Interrupt -- que é chamado após a parada por erro -- não
pode haver instruções de movimento.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Reprogramar o módulo de Interrupt de modo correspondente.
Solução
Confirmar mensagem.
1404 Instruções de edição novamente permitidas
Você está no modo “Editar sem seleção de passo implícita” e recebeu
Causa
uma liberação do editor após a conclusão do passo de movimento atual.
Efeito É possível editar novamente.
1405 <Nome do objeto> NÃO PODE SER ESCRITO
Causa O objeto está protegido contra gravação.
Efeito O comando não é processado.
Solução Verificar o estado do objeto, p. ex., separar ou cancelar o objeto.
1406 FALHA NA INDIC. DE LOCALIZAÇÃO
Causa Erro na especificação do caminho (p. ex., /R5).
Efeito O comando não é processado.
Solução Verificar e corrigir a especificação do caminho.
152 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1407 Editor bloqueado, terminar o passo de movimento
Você tentou editar um programa, porém está no modo “Editar sem sele-
Causa ção de passo implícita”. O programa ainda está em um passo de movi-
mento.
Efeito Não é possível editar.
Pressionar novamente a tecla de partida, até aparecer de novo a mensa-
Solução gem “Comandos do editor novamente permitidos”. Em seguida pode--se
editar novamente.
1408 ERRO DE COMPIL. DE LINHA OU DE COMP.
Causa A mensagem é apagada logo depois.
Efeito Nenhum.
1409 Trigger não permitido em Interrupt ou *.SUB
Causa O trigger foi programado em Interrupt ou em um módulo SUB.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Corrigir o programa.
Solução
Confirmar mensagem.
1410 Linha de programa não criada
Causa A linha de programa selecionada não existe.
Systemmeldungen 05.03.01 pt 153 de 322
Mensagens de sistema
1411 Seleção de passo fora do tampão: Arranque seguinte apaga tampão
Causa A seleção de passo está fora do registro.
Ao acionar a tecla de partida, a memória para a deslocação para trás é
Efeito
apagada.
Antes de acionar a tecla de partida, executar uma nova seleção de passo
Solução dentro da memória.
Depois disso é possível continuar o movimento para trás.
1412 ACEL. DO EIXO NÃO PROGRAMADA <Número do eixo>
Causa Não foi atribuído um valor à data do programa “$ACC_AXIS”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1413 VELOC. DO EIXO NÃO PROGRAMADA <Número do eixo>
Não foi atribuído um valor à data do programa “$VEL_AXIS”. O erro
Causa
ocorre quando existe uma instrução de movimento antes da pasta INI.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1414 ACELER. DE LOCAL. NÃO PROGRAMADA
Causa Não foi atribuído um valor à data do programa “$ACC.CP”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
154 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1415 ACELER. DE VELOC. NÃO PROGRAMADA
Causa Não foi atribuído um valor à data do programa “$VEL.CP”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1416 ACELER. DE ORIENT. NÃO PROGRAMADA
Não foi atribuído um valor às datas do programa “$ACC.ORI1” e
Causa
“$ACC.ORI2”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1417 VELOC. DE ORIENT. NÃO PROGRAMADA
Não foi atribuído um valor às datas do programa “$VEL.ORI1” e
Causa
“$VEL.ORI2”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 155 de 322
Mensagens de sistema
1418 <X, Y, Z, A, B, C> BASE NÃO PROGRAMADA
Não foi atribuído um valor à data do programa “$BASE”.
-- em um programa de usuário
Causa -- após a neutralização dos dados fonte para um comando cartesiano.
A consulta é realizada em movimentos cartesianos.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
No processamento de comando: atribuir um valor a “$BASE”.
No processamento de programa: alterar o programa de forma correspon-
Solução
dente.
Confirmar mensagem.
1419 <X, Y, Z, A, B, C> TOOL NÃO PROGRAMADA
Não foi atribuído um valor à data do programa “$TOOL”.
-- em um programa de usuário
Causa -- após a neutralização dos dados fonte para um comando cartesiano.
A consulta é realizada em movimentos cartesianos.
No processamento de comando: Travamento de todos os comandos ati-
vos.
Efeito
No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
No processamento de comando: atribuir um valor a “$TOOL”.
No processamento de programa: alterar o programa de forma correspon-
Solução
dente.
Confirmar mensagem.
1420 POS. APROX. NÃO PROGRAMADA <Critério de aproximação>
Às datas de programa “$APO.VEL”, “$APO.ROB”, “$APO.DIS” e/ou
Causa
“$APO.ORI” não foi atribuído nenhum valor.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
156 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1421 <Objeto> : <Número do erro> erro durante a análise
O erro de análise devido a um tipo de dado desconhecido pode ocorrer
Causa em tipos de dados globais autodefinidos e ENUM’s.
Em consequência disso a BOF deve promover um segundo download.
Quando causado por tipos globais, o segundo download do arquivo pode
Efeito
eliminar o erro.
A BOF filtra o número do erro e dispara o segundo download do arquivo
Solução
em questão.
1422 <Variável> VALOR INVÁLIDO
Acesso de leitura a uma variável que não foi inicializada e não possui um
valor válido, p.ex., a leitura de “$POS_INT” fora de um programa de in-
Causa terrupção.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
1423 EXCESSO
O valor não pode ser aceito pelo tipo de dado especificado, p.ex., atribui-
Causa ção do valor numérico >255 ao tipo de dado “char”.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar a mensagem durante o processamento do programa.
Systemmeldungen 05.03.01 pt 157 de 322
Mensagens de sistema
1424 SOBRECARGA DE PROGRAMA
O nível de encadeamento para subprogramas e funções foi ultrapas-
Causa sado. Ocorre também quando subprogramas se chamam mutuamente
em um loop sem fim.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1425 INSTRUÇÃO NÃO PERMITIDA
Instrução de programa que não é permitida como comando;
Causa Instrução de programa que só é permitida em um programa de Interrupt.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar a mensagem durante o processamento do programa.
1426 CARGA DE SELECÇÃO DEM. GRANDE
Causa O nível de encadeamento das variáveis foi excedido.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar a variável de modo correspondente.
Solução
Confirmar mensagem.
158 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1427 $OUT_C(N) NÃO É PERMITIDO EM PROGRAMAS DE INTERRUPT
Causa $OUT_C(N) foi utilizado em um programa de Interrupt.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de Interrupt de modo correspondente.
Solução
Confirmar mensagem.
1428 VALOR DE FUNÇÃO NÃO DEFINIDO
Causa No módulo de função falta a instrução RETURN.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Inserir a instrução RETURN.
1429 CADEIA DE CARACTERES DEMASIADO LONGA
Em uma atribuição de valores a campos, a cadeia de caracteres possui
mais caracteres que o campo existente.
Causa Exemplo:CHAR c[3]
c[]=”abcde”
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução Exemplo:CHAR c[3]
c[]=”abc”--confirmar mensagem.
Systemmeldungen 05.03.01 pt 159 de 322
Mensagens de sistema
1430 <Interrupt> não definido.
Um Interrupt ou trigger não definido foi manipulado.
Causa
A consulta é feita no processamento do comando e do programa.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Declarar o Interrupt.
Solução
Confirmar mensagem.
1431 ESCOLHA NÃO É POSSÍVEL
Causa Não é possível selecionar o editor.
Verificar se o arquivo existe (p .ex., se um objeto deve ser aberto em
Solução
modo de visualização) ou está munido com o atributo”hidden”.
1432 QUANTIDADE MAX. DE INTERRUP. DEFINIDAS
Foram definidos mais de 32 Interrupts.
Causa Não é permitido definir mais de 32 Interrupts
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
160 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1433 QUANTIDADE MAX. DE INTERRUP. ACTIVADAS
Foram ativadas mais de 8 Interrupts.
Causa Não é permitido ativar mais de 8 Interrupts.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1434 DESTINO NÃO ALCANÇADO
Na seleção de passo em um passo CIRC ângulo circular, o contorno não
Causa pôde ser determinado. Na partida é executado um LIN sobre o ponto de
destino programado.
Efeito O próximo movimento também será um movimento SAK.
Solução Nenhuma.
1435 LEITURA NÃO AUTORIZADA
Foi lida uma variável “$” que não é permitida para o tipo de interpretador
Causa selecionado.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
No processamento de programa é necessário que a mensagem seja
Solução
confirmada.
1436 DISQUETE PROTEGIDA EM ESCRITA
Causa O disquete está protegido contra gravação.
Efeito Disquete não permite gravação.
Solução Remover a proteção contra gravação.
Systemmeldungen 05.03.01 pt 161 de 322
Mensagens de sistema
1437 RETORNO À POSIÇÃO
No retorno de um programa de Interrupt o SAK não foi alcançado.
Causa Antes de terminar o programa de Interrupt é necessário o reposiciona-
mento na posição de interrupção, p. ex., com LIN $POS_RET.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1438 APARELHO DE ARQUIVAR NÃO ESTAR PRONTO:
Causa Falta disquete ou drive de disquete com defeito
Efeito Não é possível arquivar no disquete.
Inserir disquete no drive.
Solução
Verificar o drive de disquete.
1439 <Nome da variável> ARGUMENTO NÃO PERMITIDO
Ao menos um argumento não é permitido na função; p. ex., SQRT (valor
Causa negativo).
A consulta é feita na interpretação de funções C.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
162 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1440 IDENTIFICAÇÃO DA MAILBOX NÃO PERMITIDA
Causa Na função C “MBX_REC” foi especificado um “MBX_ID” errado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1441 PRIORIDADE DE INTERR. NÃO PERMITIDA
Causa A prioridade de Interrupt é maior que 128 ou menor que 1.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Alterar o programa de forma correspondente.
SEQUÊNCIA DE INSTR. IMPOSSÍVEL COM POS. APROX.(Módulo
1442 <Nome do módulo>, frase <Movimento número de passo>)
Entre dois passos de movimento, que devem passar por uma aproxima-
Causa
ção, está programado “DRIFT”, “$TOOL” ou “$FILTER”.
Efeito Para os passos de movimento não haverá aproximação.
Solução Alterar o programa de forma correspondente.
1443 MOV. ARRANQUE NÃO PERMITIDO
O primeiro passo de movimento no programa é relativo.
Causa O primeiro passo de movimento no programa não está totalmente pro-
gramado, p. ex., PTP [33.33].
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 163 de 322
Mensagens de sistema
1444 ÍNDICE DE CAMPO NÃO PERMITIDO
Acesso a um elemento de campo inexistente.
Exemplo:
Causa INT Hugo[3,3]
Hugo[7,3]=9
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
1445 POSIÇÃO DO ROBÔ NÃO PERMITIDA
Após o reposicionamento com LIN o estado do ângulo não coincide mais
Causa
com o estado do passo programado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Executar o reposicionamento com PTP.
1446 ATRIBUIÇÃO DE VALOR NÃO PERMITIDA
Atribuição de valor não permitida com variáveis predefinidas, p. ex.,.
$SPEED.ORI1 <= 0.0 ou > $SPEED_MA.ORI1. Ou $Base bem como
Causa $Tool, atribuídos para a cinemática, não são permitidos.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
164 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
PONTO IMPOSSIVEL DE ALCANCAR FIN. SOFT. <Direção de deslo-
1447 cação><Número do eixo>
O ponto de destino não pode ser atingido devido ao interruptor de fim de
Causa curso do software.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
1448 <Nome> NÃO ESTA EVIDENTE
O nome da impressão do conteúdo da memória especificado continha
Causa símbolos genéricos. Devido à expansão destes símbolos genéricos re-
sultam vários nomes de arquivo válidos. Porém isso não é permitido.
Efeito A transmissão de dados não é efetuada.
Solução Informar um nome inequívoco.
1449 <$variável> VARIAVEL PROTEGIDA EM ESCRITA
Acesso de gravação a uma variável protegida contra gravação, p.ex.,
Causa “$POS_ACT”.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
1450 TRANSFORMAÇÃO NÃO PREVISTA
$BASE ou $TOOL foi atribuído, apesar de nenhuma transformação estar
Causa prevista.
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 165 de 322
Mensagens de sistema
1451 DIVISÃO POR 0
Um valor deve ser dividido por “0”.
Causa
A consulta é feita no processamento de comandos e de programas.
No processamento de comando: O comando não é processado.
Efeito No processamento de programa: Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
Corrigir o programa.
Solução
Confirmar mensagem.
1452 Andamento para trás não ativado
Causa Movimento para trás está desativado ($VW_BACKWARD = FALSE).
O comando Movimento para trás é rejeitado ao pressionar a tecla “Par-
Efeito
tida para trás”.
Solução Definir a variável “$VW_BACKWARD” como TRUE.
1454 ARRANQUE DA CONTINUAÇÃO IMPOSSÍVEL
Causa BSTEP.
Efeito Nenhum.
1455 NÃO PERMITIDO NESTE MODO DE EDIÇÃO
Foi introduzido um comando modificador do objeto no modo Protocolo do
Editor.
Causa No modo de correção de dados houve uma tentativa de apagar ou copiar
um bloco de passos, ou de apagar um passo formado por apenas uma
linha.
Efeito A ação tentada não é executada.
Solução Editar no modo de edição completo.
166 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1456 Ponto de arranque igual ao ponto de destino
Causa A distância do ponto de início até o ponto de destino é muito reduzida.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
Reprogramar o ponto de início ou o ponto de destino.
Solução
Confirmar mensagem.
1457 Ponto de arranque igual ao ponto auxiliar
Causa A distância do ponto de início até o ponto auxiliar é muito reduzida.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
Reprogramar o ponto de início ou o ponto auxiliar.
Solução
Confirmar mensagem.
1458 Ponto auxiliar igual ao ponto de destino
Causa A distância do ponto auxiliar até o ponto de destino é muito reduzida.
Frenagem sobre a rampa.
Efeito
Travamento dos comandos ativos.
Reprogramar o ponto de destino ou o ponto auxiliar.
Solução
Confirmar mensagem.
1459 Não é possível voltar atrás: SP executado
Houve uma tentativa de executar um movimento para trás, o qual está
situado dentro de um subprograma (SP) já executado.
Causa
Neste SP não é possível executar uma comutação para frente. Por isso,
o movimento para trás também é bloqueado.
Efeito O comando não é executado.
Solução Mover para frente.
Systemmeldungen 05.03.01 pt 167 de 322
Mensagens de sistema
1460 Apagar o registo: já não é possível voltar atrás
Foi feita uma edição ou seleção de passo,que causa o apagamento do
Causa
registro.
Efeito Mover para trás não é possível:
Solução Mover para frente.
1462 ERRO DE SINTAXE NO COMANDO
Causa O comando tem um erro de sintaxe.
Efeito O comando não é executado.
Solução Corrigir o comando.
1463 OBJECTO NÃO PREPARADO
Causa O programa não pode ser processado pelo editor.
Efeito O comando não é executado.
Solução Abrir o programa com “Editar”.
1464 $OUT_C(N) NÃO É PERMITIDO NO PROGRAMA SUBMIT
Causa $OUT_C(N) foi utilizado em um programa Submit.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar o programa Submit.
1465 SÓ 8 $OUT_C(N) ATRIBUIÇÕES PERMITIDAS POR MOVIMENTO
Causa Foram utilizadas mais de 8 $OUT_C(N) atribuições.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar programa.
168 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1466 CONFIRMAR: atribuição de dados ao SINAL errado
A atribuição de saída de um sinal não está situada totalmente em um
Causa objeto de dados ( OUTB, OUTW ou OUTDW em iosys.ini), com atribui-
ção de SINAL e opção $DATA_INTEGRITY=TRUE.
Efeito O SINAL não é gravado.
A SINAL deve estar situada em um objeto de dados de comprimento cor-
Solução
respondente.
1467 Atenção! Pode estar programada a velocidade máxima
Causa Mudança do modo de operação T2 ou AUT.
Efeito Comandos atuais travados.
Solução Confirmar mensagem.
1468 TECLA NÃO ATRIBUÍDA
Pressionar uma tecla softkey ou tecla de função não atribuída, dentro da
Causa
operação conduzida.
Efeito Nenhum.
Entrada em HW_INF.INI para DSE <Número DSE>:<Entrada em
1469 hw_inf.ini> ignorada. <Ficheiro carregado> carregado
O reconhecimento automático de servo--hardware descobriu um item em
Causa HW_INF.INI que não se aplica para o tipo DSE ou para a situação do
arquivo DSE no HD. O código DSE será carregado de outra fonte.
Efeito Informação para o usuário!
Alterar os itens em HW_INF.INI ou copiar os arquivos DSE para o res-
Solução
pectivo diretório.
Systemmeldungen 05.03.01 pt 169 de 322
Mensagens de sistema
Tipo de unidade de comando não pode ser identificado. Ficheiro
1470 padrão <Ficheiro padrão DSE> carregado em DSE <Número DSE>
O reconhecimento automático de servo--hardware pôde detectar o tipo
de DSE, mas não conseguiu identificar com precisão o tipo de unidade
Causa de comando.
Por isso será carregado KRC2 por padrão.
Eventualmente pode ocorrer que seja carregado um arquivo DSE incor-
Efeito
reto, e por isso a unidade de comando não funciona.
Em HW_INF.INI deve ser inserido “Automático” ou diretamente o arquivo
Solução
DSE.
1472 TECLA NÃO AUTORIZADA
Na operação em modo Texto foi pressionada uma tecla não permitida
Causa
(p.ex., uma softkey).
Efeito A entrada não é processada.
1474 MUDANÇA DE DIRECÇÃO IMPOSSÍVEL
Causa No processamento de comando
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem
1477 NÃO HA TRATAM. PRINCIPAL
Foi selecionada a imagem principal de execução, porém o passo princi-
Causa
pal de execução ainda não foi interpretado.
Efeito Nenhum.
Solução Iniciar o programa.
170 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1478 NÃO HA TRATAM. DE ANTECIP.
Foi selecionada uma imagem de avanço, porém sem um programa em
Causa
estado STOP ou FIM.
Efeito Nenhum.
Solução Iniciar o programa.
1481 NÃO HÁ ACESSO A DADOS DE TEMPO DE CICLO
Acesso a uma área de dados inválida ou inexistente em OWS LZD atra-
Causa
vés da tabela de hierarquia (caminho de busca).
Efeito Nenhum.
Solução Ajustar o caminho de busca para o ambiente atual do interpretador.
1482 VOLUME DEM. PEQUENO
O supervisionamento do volume aplicado foi ativado. Foi aplicado cola
insuficiente.
Causa
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware de colagem, eventualmente limpar.
1483 VOLUME DEM. GRANDE
O supervisionamento do volume aplicado foi ativado. Foi aplicado cola
em excesso.
Causa
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware de colagem, eventualmente limpar.
Systemmeldungen 05.03.01 pt 171 de 322
Mensagens de sistema
1484 FALHA DE PRESSÃO NA JUNÇÃO
A pressão de saída da cola é supervisionada continuamente pelo PLC
durante a dosagem. Ocorreu um desvio do valor da pressão para fora da
faixa de tolerância permitida.
Causa Eventualmente há bolhas de ar no duto de cola ou o bico de saída está
entupido.
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware de colagem, eventualmente limpar.
1485 FILTRO DE ÓLEO SUJO
O filtro de óleo hidráulico está sujo, de forma que a pressão hidráulica é
insuficiente.
Causa
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Limpar ou trocar o filtro de óleo.
1486 TEMPERATURA DE ÓLEO DEMASIADO ALTA
A temperatura máxima permitida do óleo foi excedida.
Causa A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Aguardar até que o óleo hidráulico tenha esfriado.
Solução
Se este estado ocorrer com freqüência, verificar a unidade hidráulica.
172 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1487 PRESSÃO DE AR DE TODA A INSTALAÇÃO
A alimentação de ar não possui a pressão necessária para as válvulas
pneumáticas.
Causa
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Assegurar um fornecimento de ar com pressão suficiente.
1488 FALHA DE VACUO
O vácuo está ausente ou muito reduzido.
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Causa
Na aplicação “Colar discos”, estes são mantidos e comandados por meio
de vácuo. Na falta de vácuo o disco não pode ser mantido em posição
depois de centralizado.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar a bomba de vácuo.
1489 ERRO DE CENTRAGEM
A peça não está corretamente posicionada ou fixada.
Eventualmente há um erro no dispositivo de introdução ou o dispositivo
Causa de fixação da peça está com defeito.
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Verificar o dispositivo de introdução e o dispositivo de fixação.
Solução
Verificar a posição da peça.
Systemmeldungen 05.03.01 pt 173 de 322
Mensagens de sistema
1490 ERRO CONTROLO DE PEÇA
Um componente soltou--se do dispositivo de fixação ou está danificado.
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Causa Na aplicação “Colar discos”, o bico de cola é pressionado sobre o disco.
Se esta pressão falta durante a colagem, o disco soltou--se do dispositivo
de fixação ou eventualmente está danificado.
Neste caso, o movimento do robô deve ser parado imediatamente e a
aplicação de cola deve ser interrompida!
Stop do gerador.
Efeito Travamento de todos os comandos ativos.
Parada de emergência.
Solução Verificar o componente.
1491 PROGR. APROX. LOCAL./PTP NÃO EXECUTÁVEL
No passo CP, a distância de deslocamento de um eixo é maior que 180
graus.
Causa Mudança de estado no passo CP.
O interruptor de fim de curso do software foi atingido em movimento
de”trajeto mais curto”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Redução do passo CP.
Solução Introdução de um ponto intermediário.
Confirmar mensagem.
1492 DEFINIÇÃO DE CANAL COM PROTOCOLOS INCOMPATIVEIS
Causa Protocolo PG ajustado, e a declaração de canal não está em SER1.
Solução Alterar o protocolamento da declaração de canal.
1493 CANAL JA OCUPADO PARA BOLSA PROGRAM.
Houve uma tentativa de acessar um canal que já foi parametrizado para
Causa
o acoplamento PLC.
Reparametrizar o canal.
Solução
Em seguida fechar o canal e abrir novamente.
174 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1495 TEMPO CONTROLO DE CARGA
O tempo máximo para o enchimento do reservatório dosador com cola
foi excedido.
A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
Causa de colagem).
O tempo para o abastecimento do reservatório dosador com cola é su-
pervisionado pelo PLC.
Se nesta operação é ultrapassado um tempo mínimo, existe um erro no
hardware de colagem.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Verificar o hardware de colagem.
1496 NÍVEL DE JUNÇÃO
O tambor de cola está vazio
Causa A consulta é realizada a partir do programa aplicativo do PCL (tecnologia
de colagem).
Efeito Nenhum.
Solução Disponibilizar um novo tambor de cola ou comutar para um tambor cheio.
1497 TODAS AS FUNÇÕES ANALÓGICAS OCUPADAS
Causa Foram ativadas mais de 2 saídas analógicas cíclicas.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Introduzir ANOUT OFF ou anular a instrução.
1498 <Nome do sinal> NENHUMA SAIDA ANALOGICA
Acesso a um sinal de saída analógica inexistente ou índice de sinal in-
Causa
correto.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
Systemmeldungen 05.03.01 pt 175 de 322
Mensagens de sistema
1499 SAÍDA ANALÓGICA JÁ OCUPADA
Uma saída analógica para a emissão cíclica analógica é ocupada pela
segunda vez no programa, p. ex.:
-- SIGNAL SIG1 $ANOUT[1]
Causa
-- SIGNAL SIG2 $ANOUT[1]
-- ANOUT ON SIG1 = ....
-- ANOUT ON SIG2 = ....
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Desligar a emissão analógica cíclica: ANOUT OFF SIGNALNAME.
VARIÁVEL SYNACT INVÁLIDA <Nome da variável> <Número do
1504 passo>
Na comparação lógica das atribuições de valores no supervisionamento
Causa cíclico Synact ocorre um erro ao acessar uma variável, p. ex., uma variá-
vel protegida contra gravação.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Correção de dados ou do programa.
Solução
Confirmar mensagem.
1505 COMBINAÇÃO DE VARIAVEIS NÃO PERMITIDA <Número do passo>
Em uma instrução Synact são combinadas entre si variáveis para passos
Causa individuais e passos de aproximação, na comparação lógica e atribuição
de valores.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Programar a instrução Synact de outro modo.
Solução
Confirmar mensagem.
176 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1506 PARÂMETROS LOCALIZAÇÃO CIRCULAR NÃO PERMITIDOS
A distância entre o ponto de início e/ou o ponto auxiliar e/ou o ponto de
Causa destino é muito reduzida, ou todos os pontos estão situados em uma
reta. A construção do círculo não é possível.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Programar corretamente o ponto auxiliar ou o ponto de destino.
Solução
Confirmar mensagem.
1507 NÍVEL SISTEMA HIDRÁULICO
O nível do óleo na unidade hidráulica está abaixo do limite.
Causa
A consulta é feita no processamento do programa PLC.
Efeito Nenhum.
Reabastecer o óleo hidráulico e verificar a estanqueidade da unidade
Solução
hidráulica.
1508 NÃO HÁ OBJECTOS
Não há nenhum objeto que corresponde aos critérios de busca especifi-
Causa
cados no comando DIR.
Efeito Nenhum.
Solução Verificar os dados e o modo de escrever no comando DIR.
1509 TIPO DE OPERAÇÃO DE PROGRAMA NÃO PERMITIDA
Causa O tipo de execução do programa selecionado não é permitido.
Efeito Nenhum.
Solução Alterar o tipo de execução do programa.
Systemmeldungen 05.03.01 pt 177 de 322
Mensagens de sistema
ERRO NA ENTRADA DO FORMATO NO. <Número do formato er-
1510 rado>
Inconsistência de formato e parâmetro informados, ou indicação de for-
mato incorreto em instrução CWRITE.
Causa
A consulta é feita no processamento do programa em S_INT função
CWRITE.
Efeito Parada do processamento do programa.
Solução Programar a indicação de formato correta.
1511 DIREITO DE ACESSO INCORRECTO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
GAMA DE VALORES PARA <Indicação do caminho> <Número do
1513 eixo> EXCEDIDO
Causa Palavra de 32 Bit é excedida.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar o programa de forma correspondente.
1514 INSERIR A PRÓXIMA DISQUETE
Causa Solicitação para inserir o próximo disquete.
Solução Inserir o disquete no drive de disquete.
1515 <Objeto >COPIA(S) RECUSADA(S)
O objeto de sistema foi transferido através de uma interface, na qual a
Causa opção”--S” não está definida.
”--S” é a identificação para o comando download.
Efeito O objeto não é transferido.
Solução Definir a opção “--S”.
178 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1516 SISTEMA DE REFERÊNCIA NÃO PROGRAMADO
Causa ”$BASE” não está ou está programado de forma incompleta.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Programar “$BASE” corretamente.
1517 PERCURSO SAK NECESSÁRIO NO ZP
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Executar um movimento SAK até o próximo ponto de destino.
1518 PARÂMETROS INICIAIS INCORRECTOS
Foi transferido um parâmetro inicial ou nenhum parâmetro para uma fun-
Causa
ção C predefinida.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Chamar a função C com parâmetro.
1519 CONTROLO ROTURA DE CABO SENSOR DE PRESSÃO
O fluxo mínimo de corrente do cabo de entrada analógica para medição
de pressão ficou abaixo do o valor limite (interface 4 -- 20 mA).
Mögliche Ursachen für die Unterschreitung des Mindeststromflußes:
Causa -- cabo de conexão solto (conector).
-- ruptura de um fio.
-- defeito na fonte de corrente.
-- sensor com defeito.
Efeito Frenagem sobre a rampa.
Verificar os cabos e conexões (conectores).
Solução Verificar a fonte de corrente.
Verificar o sensor.
Systemmeldungen 05.03.01 pt 179 de 322
Mensagens de sistema
1520 CONTROLO ROTURA DE CABO VALOR ATUAL DE VOLUME
O fluxo mínimo de corrente do cabo de entrada analógica para medição
de pressão ficou abaixo do o valor limite (interface 4 -- 20 mA).
Possíveis causas para que o valor mínimo do fluxo de corrente esteja
Causa abaixo do limite:
-- cabo de conexão solto (conector).
-- ruptura de um fio.
-- defeito na fonte de corrente.
-- sensor com defeito.
Efeito Frenagem sobre a rampa.
Verificar os cabos e conexões (conectores).
Solução Verificar a fonte de corrente.
Verificar o sensor.
1521 MUDANÇA DE SEGMENTO FALHA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1522 O EIXO SELECCIONADO NÃO PODE SER AJUSTADO
Causa O eixo selecionado a ser ajustado está inativo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Ajustar somente o eixo ativo.
1523 COMBINAÇÃO EXTP/EXTFCTP INCORRECTA
Causa Foi utilizada uma instrução EXTP ou EXTFCTP no programa.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Apagar a instrução EXTP ou EXTFCTP no programa.
180 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1524 Número máx. de Trigger activos
Causa Foi programado um excesso de triggers em um passo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Reduzir a quantidade de triggers ativos no programa.
1525 Valor para a prioridade de Trigger não permitido
Causa Foi introduzido um valor não permitido para a prioridade de trigger.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o valor.
1526 Número máx. de Trigger (50) definido
Causa Foi definido o número máximo de triggers.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar programa.
1527 AJUSTE DE SENSOR INVÁLIDO
Causa Não foi executado um movimento de transferência para o eixo.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Realizar o movimento de transferência para o eixo correspondente.
Systemmeldungen 05.03.01 pt 181 de 322
Mensagens de sistema
1528 TRAVÕES ABERTOS DURANTE A SELECÇÃO DE AJUSTE
Causa Da ação de deslocamento anterior ainda resta um freio aberto.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Aguardar até que todos os freios sejam fechados a liberação de regula-
Solução
dores esteja bloqueada.
1529 MUDANÇA DE SEGMENTO BEM SUCEDIDA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1530 VELOCIDADE REDUZIDA DURANTE DESLOCAM. DE RECEPÇÃO
A velocidade predefinida pelo usuário em “$RED_JUS_UEB” para o mo-
vimento de transferência é maior que a velocidade máxima possível para
Causa detecção do sensor.
A unidade de comando reduz a velocidade automaticamente, de forma
que o sensor ainda possa ser reconhecido.
Reduzir nos dados da máquina a velocidade permitida para desloca-
Solução
mento manual, de modo correspondente.
1531 NÃO É MODO T1 AJUSTE IMPOSSÍVEL
Causa O modo de operação da unidade de comando não é T1.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Ajustar o modo de operação em T1.
Solução Efetuar novamente o ajuste.
Confirmar mensagem.
182 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1532 CIRC EXECUTADO COMO LIN !
Causa Um movimento CIRC deve ser executado como um movimento SAK.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Após a partida o movimento CIRC é executado como LIN.
1533 Linha de programa foi corrigida
Causa Um aviso de que a linha de programa foi corrigida.
1534 SOMA INCORRECTA DE CONTROLO DADOS DE CORREC.
Causa Os dados de correção foram alterados.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Executar um movimento de transferência/referenciamento.
Solução
Arquivar os dados de correção.
1535 ATRASO INCORRETO <Número do passo>
Um Delay negativo na instrução Synact não foi utilizado em combinação
Causa com um dos 4 triggers de posição variável (M_SC_F, M_SC_B,
M_SCAPO_F, M_SCAPO_B).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar a condição lógica da instrução Synact.
Systemmeldungen 05.03.01 pt 183 de 322
Mensagens de sistema
1536 PARÂMETRO DE CAMPO NÃO PERMITIDO
Parâmetro de campo indefinido ou campo inteiro “call--by--value” na lista
Causa
de parâmetros atuais quando da chamada de função.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Não utilizar parâmetros de campo indefinidos e transferir campos inteiros
Solução
como parâmetros atuais somente por “call--by--reference”.
1537 STOP POR CARGA DE NOVOS DADOS DO UTILIZADOR
Durante o tempo em que um processo está ativo é chamado o arquivo
“$CUSTOM.DAT”.
Causa
Ao editar “$CUSTOM.DAT” não pode haver nenhum processo ativo, visto
que devido ao carregador o sistema está sob plena carga.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem;
Solução
Não editar “$CUSTOM.DAT” enquanto “Processo ativo”.
1538 Valor ‘DISTANCE’ não permitido
Causa O valor para “DISTANCE” não é permitido.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Introduzir o valor admissível.
1539 Valor ‘DELAY’não permitido
Causa O valor para “DELAY” não é permitido.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Introduzir o valor admissível.
184 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1540 COMPLEXIDADE D.INTERRUPÇÃO ULTRAPASSADA
A nível de unidade de comando e a nível de robô foram utilizadas ao
Causa todo mais de 16 variáveis “lentas” nas expressões lógicas das instruções
INTERRUPT DECL.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Utilizar menos variáveis predefinidas. Eventualmente agrupar expressões
Solução
lógicas com CYCFLAGS.
1541 DADOS DE MÁQUINA INCORRECTOS
Causa Os dados da máquina ainda não foram verificados.
Efeito Nenhum.
Copiar os dados da máquina corretos do arquivo de dados opcionais
Solução
para a unidade de comando.
1542 Erro em ‘UPCALL’ Token
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
1543 TODAS AS ENTRADAS ANALÓGICAS CÍCLICAS OCUPADAS
Causa Uma terceira entrada analógica cíclica foi ligada no programa.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Desligar uma entrada analógica cíclica.
1544 ENTRADA DIGITAL OCUPADA
Causa Uma entrada digital é ligada ciclicamente pela segunda vez no programa.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Desligar previamente a entrada digital cíclica.
Systemmeldungen 05.03.01 pt 185 de 322
Mensagens de sistema
1545 TODAS AS SAIDAS DE IMPULSO OCUPADAS
Causa Foram ativadas mais de 16 saídas de impulso.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Alterar o programa de forma correspondente.
1546 DURAÇÃO DE IMPULSO NÃO PERMITIDA
Foi introduzido um valor para a duração do impulso que está situado fora
da faixa permitida.
Causa
A faixa permitida para a duração do impulso compreende de 0,05 até
3049.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Programar os valores dentro da faixa permitida.
1547 VARIÁVEL DE DESTINO NÃO É DO TIPO REAL
Tipo de dado incorreto para uma variável de destino ou formato incorreto
Causa
em uma instrução CREAD ou SREAD.
Corrigir a instrução CREAD ou SREAD:
Solução -- alterar a indicação de formato ou
-- utilizar uma variável do tipo REAL.
1548 <Nome do programa indicado> NOVA SELEÇÃO IMPOSSIVEL
O programa que precisa ser vinculado para a nova seleção, causa um
Causa
erro de vinculação.
Efeito Travamento de todos os comandos ativos.
Eliminar o erro com base nos erros de vinculação contidos na lista de
Solução
erros.
186 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1549 HANDLE NÃO PERMITIDO
Causa Em CWRITE ou CREAD foi programado um HANDLE inválido.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Criar um HANDLE válido.
1550 NÃO EXISTEM MAIS DADOS/VARIÁVEIS
Em SREAD/CREAD não há nenhum texto para leitura ou não há ne-
Causa
nhuma variável para colocar os valores.
1552 CANAL JÁ ABERTO
Causa Houve a tentativa de abrir novamente um canal já aberto anteriormente.
1553 ABERTURA/FECHO CANAL NÃO PERMITIDO
Houve a tentativa de abrir um canal SINEC H1 por iniciativa do operador,
Causa por meio do comando OPEN, ou de fechar por meio do comando
CLOSE.
Efeito Nenhum.
Nenhuma; os canais SINEC--H1 são abertos e fechados automatica-
Solução
mente.
1554 VARIÁVEL DE PARÂMETROS TIPO INCORRECTO
Causa A variável de parâmetro para o canal é do tipo incorreto.
Efeito Nenhum.
Solução Corrigir a declaração CHANNEL para o canal.
Systemmeldungen 05.03.01 pt 187 de 322
Mensagens de sistema
1555 PARÂMETRO DE CANAL INCORRECTO OU INCOMPLETO
Pelo menos um parâmetro de canal está incorreto ou não foi inicializado
Causa
nas variáveis de parâmetro em “$CUSTOM.DAT”.
Efeito Nenhum.
Solução Corrigir ou inicializar a variável de parâmetro.
1556 CANAL BUS SINEC L2 NÃO ABERTO
Houve a tentativa de abrir uma conexão SINEC L2, sem uma abertura
Causa
prévia do canal de bus SINEC L2.
Efeito Nenhum.
Solução Abrir o canal de bus SINEC L2.
1557 CANAL SATURADO
Causa O canal já está ocupado com o número máximo de tarefas permitidas.
Efeito Nenhum.
Solução Aguardar até que pelo menos uma tarefa seja concluída.
1558 ABRIR/FECHAR CANAL NECESSÁRIO
Os parâmetros de canal utilizados na ocupação do canal não coincidem
Causa
com os atuais parâmetros de canal.
Efeito Nenhum.
Solução Fechar o canal antes de ocupar o mesmo.
188 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1559 INDICAR CANAL NÃO PERMITIDO
Houve a tentativa de enviar uma comando produtivo através do canal de
bus SINEC L2.
Causa
Houve a tentativa de emitir o protocolo ou a memória de mensagens
para uma terceira estação, através do canal SINEC H1.
Efeito Nenhum.
Solução Nenhuma.
1560 CANAL JÁ FECHADO
Houve a tentativa de fechar novamente um canal já fechado anterior-
Causa
mente.
Efeito Nenhum.
Solução Cancelar o comando.
1561 CANAIS DE COMUNIC. SINEC L2 NÃO ESTÃO FECHADOS
Houve a tentativa de fechar o canal de bus SINEC L2, sem fechar antes
Causa
todos os canais de comunicação SINEC L2.
Efeito Nenhum.
Solução Fechar todos os canais de comunicação SINEC L2.
1562 <SINEC L2 SINEC H1> CARTÃO INEXISTENTE
Houve a tentativa de acessar um canal =SINEC L2 ou SINEC H1 sem
Causa
que o respectivo módulo esteja inserido.
Efeito Nenhum.
Solução Inserir o respectivo módulo.
Systemmeldungen 05.03.01 pt 189 de 322
Mensagens de sistema
1564 CAMPO DE VALORES EXCEDIDO
O tempo de espera na instrução “WAIT_SEC” -- expresso em ciclos bá-
Causa
sicos -- supera a faixa Long, ou seja, é maior que 2147483647.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Introduzir tempos de espera menores.
1565 SINEC L2--ERRO DE PREVISÃO
A abertura ou fechamento de um canal SINEC L2 é recusado devido a
Causa
um erro de previsão detectado pelo módulo SINEC L2.
Verificar e corrigir o parâmetro de canal (p. ex. velocidade de transmis-
Solução
são em Baud).
1566 SINEC L2--ERRO DE TRANSMISSÃO <Número do erro Sinec L2--M>
A transmissão de dados através de SINEC L2 não é possível devido a
Causa
um erro detectado pelo módulo SINEC L2.
Efeito Nenhum.
Solução Verificar o trajeto de transmissão e eliminar o erro.
1567 NÃO HÁ COMUNICAÇÃO COM O CARTÃO SINEC L2
Causa Falha de comunicação de IFC para o módulo SINEC L2.
Efeito Nenhum.
Executar uma partida a quente.
Solução Se a falha continuar ocorrendo, efetuar uma troca de módulos (IFC com
módulo SINEC L2).
1568 CANAL OCUPADO COM A MAX. QUANT. DE PROCESSOS
Causa Um número excessivo de processos passa pela interface serial
Solução Aguardar até que um processo seja concluído.
190 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1569 MODIF. PARÂMETROS NÃO PERMITIDA, CANAL OCUPADO
Houve a tentativa de ocupar um canal já ocupado, com parâmetros dife-
Causa
rentes dos atuais.
Corrigir de modo correspondente os dados utilizados para o canal, ou
Solução
fechar o canal e abrir novamente com os respectivos parâmetros.
1570 VALOR DE PARÂMETRO NÃO PERMITIDO
Causa O valor máximo de um parâmetro de canal foi excedido.
Solução Corrigir o parâmetro de canal.
1571 VELOC. DE TRANSM. EM BAUD ULTRAPASSADA
Ultrapassou o limite de velocidade de transmissão em BAUD nos dois
Causa
canais (o limite é 19.200 Baud).
Solução Corrigir a taxa Baud.
1572 CONTROLO TEMPO DE PROTOCOLO
Causa O tempo de protocolo ajustado foi ultrapassado.
Verificar se a conexão física com o periférico ainda existe.
Solução Aumentar o valor para o controle de tempo de modo correspondente,
caso este seja muito baixo.
1573 ERRO DE SINTAXE IFC
Em uma tentativa de abrir ou fechar um canal ocorreu um erro de sintaxe
Causa na interface da CPU, referente à instrução gerada pela unidade de co-
mando.
Solução Fechar e abrir novamente o canal.
Systemmeldungen 05.03.01 pt 191 de 322
Mensagens de sistema
1574 ERRO DE SISTEMA <Número do erro> <Causador> DA KRC
Ocorreu um erro de sistema KRC.
Causa O erro correu no sistema base e não pode ser confirmado.
Travamento de uma tarefa de sistema.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Iniciar arquivamento.
Enviar todos os arquivos de protocolo para o setor de desenvolvimento.
Descrever a ação de operação.
Solução
Reinicializar a unidade de comando KRC.
Após a reinicialização enviar C:\KRC\Bin\vxworks.debug, caso disponí-
vel, para o setor de desenvolvimento.
1576 ALTERAÇÃO DE BASE NÃO PERMITIDA
Causa Houve a tentativa de alterar a BASE durante a operação Conveyor.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o programa de modo correspondente.
1577 <Nome> JA EXISTENTE
O componente SVB não pode ser criado no editor, se já existir um com-
Causa
ponente SKL com o mesmo nome, e vice--versa.
Solução Renomear o componente.
1578 <Valor> NÃO PERMITIDO
Causa Introdução de um valor não permitido.
Solução Introduzir o valor admissível.
192 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1579 ERRO SISTEMA APS
Causa No APS foi detectado um erro interno do APS.
Solução Consultar o APS, provavelmente é necessária uma reinicialização.
1580 TECHFKT $TECH [<parâmetros 1--3>]. FCT NÃO PERMITIDA
Os parâmetros de função programados em $TECH[i].FKT i=1..3 não cor-
respondem à definição da função.
Causa
Os parâmetros de função são verificados pelo interpretador no avanço
inicial.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Correção dos parâmetros de função.
1581 MODO TECH NÃO PERMITIDO
Para a classe de tecnologia “VEL” foi programado o modo “CYCLE”.
Causa A consulta é efetuado no interpretador quando da alteração de “CLASS”
ou “MODE”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o programa.
1582 ATRIBUIÇÃO CINEMÁTICA NÃO PERMITIDA
Com a função EK foi atribuída uma cinemática adicional inexistente à
Causa
variável de sistema “$BASE”.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o programa.
Systemmeldungen 05.03.01 pt 193 de 322
Mensagens de sistema
1583 <SER_1> ERRO DE COMPR. DE BLOCO
Causa O bloco de dados recebido é muito longo.
Adaptar o espaço de compensação do equipamento de arquivo ao es-
Solução
paço interno da unidade de comando ou mais pequeno.
1584 ESTRUT. PROGRAMA INVÁLIDA PARA RESUME
No processamento de RESUME o indicador de avanço remeteu ao nível
no qual o Interrupt foi declarado.
Causa RESUME pode ser utilizado somente com a técnica de subprograma.
O Interrupt não pode ser ativado no mesmo nível no qual foi declarado o
Interrupt.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Resetar o programa.
Solução Alterar o programa de forma correspondente.
No processamento de RESUME é necessário que $ADVANCE=0.
1585 VALOR APROX. PARÂMETROS DEM. GRANDE
No passo CIRC o valor do parâmetro CA (ângulo total) foi programado
Causa
demasiado grande.
Solução Corrigir de modo correspondente o valor do parâmetro CA.
1586 ERRO SINEC AP/TF <SINEC AP/TF--código de erro>
Ver “Funções Tecnológicas SINEC AP, Parte B” em processamento de
Causa
comandos
Solução Ver “Funções Tecnológicas SINEC AP, Parte B”.
194 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1587 REFERÊNCIA APLICAÇÃO PERDIDA (FILESERVER)
A referência de aplicação para o servidor de arquivos foi interrompida ou
Causa
removida.
Solução Verificar o trajeto de transmissão entre ACR e o servidor de arquivos.
1588 INDIC. LOCALIZ. INVÁLIDA
Causa Na copia de SINEC H1 da indicação de localização foi usado um “joker”.
Solução Copiar apenas objeto individual.
1589 FECHAR CANAL ** INVAL.,CANAL ATIVO
Causa O respectivo canal não pode ser fechado durante a transmissão.
Solução Aguardar a conclusão da transmissão ou interromper a transmissão.
1590 ENUM. NÃO COMPATÍVEL EM $CONFIG
Um SET INFO é processado em uma variável ENUM de uma lista de
dados de usuário.
Causa
A extensão do caminho de busca foi alterada.
Sem acesso à informação de tipo ENUM.
Registrar a declaração ENUM e a declaração de variável no arquivo
Solução
“$CONFIG.DAT”.
1591 MÍNIMO DEVE SER INFERIOR AO MÁXIMO
Causa Foi declarado um mínimo que está acima do valor máximo.
Stop do gerador.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o valor.
Systemmeldungen 05.03.01 pt 195 de 322
Mensagens de sistema
1594 VALOR TECH_MAX ULTRAPASSADO
O número do gerador de funções programado é maior que o número má-
Causa ximo de geradores de funções previsto nos dados de máquina específi-
cos do robô (TECH_MAX).
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Corrigir o programa.
ADAP. ACEL. DEP. DE CARGA IMPOSSÍVEL PARA PTP <Número de
1595 passo>
O cálculo de simulação do modelo dinâmico integrado ultrapassa os va-
lores limite predefinidos de torque contínuo da transmissão.
Causa A consulta é efetuada em cada preparação PTP interligada com adapta-
ção de aceleração dependente de carga.
Ver também Informação do operador.
Efeito Nenhum efeito.
Caso admissível, elevação dos torques contínuos da transmissão máxi-
Solução mos permitidos.
Redução do limite de otimização “$OPTEXCLUDE”.
1596 AJUSTE DE TAQUIMETRO POSSÍVEL SÓ PARA UM EIXO
Houve uma tentativa de executar um ajuste de taquímetro da DSE simul-
Causa tâneo para vários eixos.
A consulta é efetuada na atribuição de valor para”$PROG_EEPOT”.
Efeito A atribuição de valor não é efetuada.
Solução Executar o ajuste de taquímetro apenas para um eixo.
1597 NÃO EIXO DSE
Tentativa de executar um ajuste de taquímetro para um eixo que não
Causa está no módulo do circuito de medição da DSE.
A consulta é efetuada na atribuição de valor para”$TACH_CHANGE”.
Efeito A atribuição de valor não é efetuada.
Solução Executar o ajuste de taquímetro apenas para eixos DSE.
196 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1598 LOAD NÃO PROGRAMADO
Com a adaptação de aceleração ligada, a carga do robô não está total-
Causa
mente programada.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Programar “$LOAD” corretamente.
1599 EIXO NÃO SELECCIONADO
Houve uma tentativa de executar um ajuste de taquímetro, apesar de
Causa não haver nenhum eixo selecionado.
A consulta é efetuada na atribuição de valor para”$TACH_CHANGE”.
Efeito A atribuição de valor não é efetuada.
Solução Primeiro selecionar um eixo, para então executar o ajuste de taquímetro.
1600 CONTROL : <Número DEVCONTROL>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
NÃO EXISTE COINCIDÊNCIA DE PASSOS, MOVIMENTAR PRIMEIRO
1601 EM SINGLE--STEP
Nenhum movimento SAK em uma troca de modo de operação após
Causa
AUTO.
Solução Executar primeiro um SINGLE--STEP.
NECESSÁRIO MOVIMENTO DE COINCIDÊNCIA DE PASSOS EM
1602 SINGLE--STEP
Solução É necessário executar um movimento SAK em single--step.
Systemmeldungen 05.03.01 pt 197 de 322
Mensagens de sistema
1603 GRADEAMENTO DE PROTECÇÃO ABERTO
Solução Fechar grade de proteção.
1604 ERRO NA DEFINIÇÃO DO TRACE
Causa O trace foi configurado incorretamente no arquivo”TRACE.DEF”.
Solução Corrigir “TRACE.DEF”.
1605 ERRO AO LER TRACE.DEF
Ao iniciar uma gravação trace não foi possível ler o arquivo “TRA-
Causa
CE.DEF”.
Efeito O trace não é efetuado.
Disponibilizar “TRACE.DEF”.
Solução
Inicializar ou verificar o servidor FTP.
1606 INTERBUS: ERRO NO BUS <Segmento, posição>
Causa Erro ou falha na transmissão de dados no interbus.
A transmissão de dados no interbus é interrompida.
Efeito
As saídas são resetadas.
Solução Localização de erros com CMD (ferramenta de diagnóstico Phönix).
1607 INTERBUS: ERRO NO BUS <Segmento, posição>
Causa Falha no módulo de bus especificado.
Efeito As saídas são resetadas.
Eliminar a falha no módulo de bus especificado.
Solução
Diagnóstico com o software CMD (Phönix).
198 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
NÃO É PERMITIDO ATRIBUIR UM VALOR DE FUNÇÃO A $CYC-
1608 FLAG
O valor de retorno de uma função BOOL foi atribuído diretamente a um
Causa
$CYCFLAG.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
NÃO É PERMITIDO ATRIBUIR VALORES DE EXECUÇÃO A $CYC-
1609 FLAG
Causa Dados de tempo de execução locais foram atribuídos a um $CYCFLAG.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa (utilizar apenas variáveis globais!).
Solução
Confirmar mensagem.
1610 Erro no ficheiro de configuração
Causa O arquivo de configuração contém erros.
Solução Corrigir o arquivo de configuração.
1611 MAC--ID já está a ser utilizado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1612 ERRO NO TASKSTART
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 199 de 322
Mensagens de sistema
1613 Erro no allocate device <Mac--ID>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1614 Erro no scan device...
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
1615 ‘PRIO’ 40--80 bloqueadas
Foi utilizada uma prioridade bloqueada entre 40 e 80 para um comando
Causa de trigger. Esta faixa está reservada para a atribuição de prioridade in-
terna.
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Alterar programa.
Solução
Confirmar mensagem.
1616 ARRANQUE BLOQUEADO <String>
Causa A partida foi bloqueada durante a inserção de um passo em PROKOR.
Efeito A partida não pode ser executada.
Solução Concluir o processo de inserção.
1617 Interbus: Erro de bus no circuito Slave
Causa Erro de bus no anel da unidade de comando de nível superior (PLC....).
Efeito A interface externa do automático é desativada.
Solução Eliminar o erro de bus no anel de nível superior.
200 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
1618 Ativação permitida apenas no programa de interpretação do robô
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
1619 Instrução externa <Nome da função externa> não carregada
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
<String para tipo de dados dos elementos> campo de retorno muito
1620 pequeno, número de elementos = <Número de elementos>
Frenagem sobre a rampa.
Efeito
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
2000 O NOVO PASSO NÃO E UMA DECLARAÇÃO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2001 ESPERA--SE UM SINAL BINÁRIO DE SAÍDA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 201 de 322
Mensagens de sistema
2002 INICIALIZAÇÃO INCORRECTA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2003 VALOR DE INICIALIZAÇÃO ERRADO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2004 ESPERA--SE ’DEFDAT’
A primeira linha de um arquivo DAT deve iniciar com a palavra--chave
Causa
“DEFDAT”.
Efeito O respectivo arquivo SRC não pode ser executado.
Solução Alterar o arquivo DAT.
2005 VARIÁVEL NÃO INICIALIZADA
Causa Uma variável não foi inicializada.
Efeito O programa não pode ser executado.
Solução Inicializar a variável.
2006 ESPERA--SE ’CA’
Causa A palavra--chave foi esquecida ou introduzida de modo incorreto.
Efeito O programa não pode ser compilado.
Solução Corrigir o programa.
202 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2007 ESPERA--SE ’DEF’ OU ’DEFFCT’
A palavra--chave “DEF” ou “DEFFCT” foi esquecida ou introduzida de
Causa
modo incorreto.
Efeito O programa não pode ser compilado.
Solução Corrigir o programa.
2008 PASSO NÃO DEVE SER MODIFICADO
Causa Foi executada uma seleção de passo não permitida.
Efeito A seleção de passo não é efetuada.
Solução Selecionar outro passo.
2009 MODIF. DE NOME SP/FUNC. GERAL NÃO AUTORIZADA
Causa Modificação de nome não permitida.
Solução Anular a modificação de nome.
2010 NÃO É PERMITIDO MODIFICAR O NOME DE UMA LISTA
Causa Houve uma tentativa de modificar o nome de uma lista de dados.
Efeito A alteração é rejeitada.
Solução Manter o nome antigo.
2011 TIPOS DIFERENTES EM MODIF. DO VALOR INICIAL
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 203 de 322
Mensagens de sistema
2012 NÃO É POSSÍVEL ESTABELECER LINK COM SRC
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2013 NÃO É PERMITIDO MODIFICAR O NOME DA VARIÁVEL
Causa Alteração não permitida do nome da variável.
Solução Anular a modificação.
2014 NÃO É PERMITIDO MODIFICAR O NOME DO ÍNDICE
Causa Alteração não permitida do índice.
Solução Anular a modificação.
2015 NÃO EXISTE SUBPROGRAMA DE SISTEMA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2016 NÃO EXISTE FUNÇÃO DE SISTEMA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
204 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2017 ERRO DE SINTAXE NA INDICAÇÃO DE LOCALIZ. P_
A sintaxe da especificação do caminho está incorreta.
Exemplo:
DEFDAT PROG_1 PUBLIC
Causa
DECL INT Otto = 1
ENDDATDEF P()
IMPORT INT Otto_2 IS R1/PROG_1..Otto
END
Efeito O programa não pode ser executado.
Corrigir a especificação do caminho.
Exemplo:
DEFDAT PROG_1 PUBLIC
DECL INT Otto = 1
Solução
ENDDAT
DEF P()
IMPORT INT Otto_2 IS /R1/PROG_1..Otto
END
SUBPROGR. EXTERNO EM CONCORDÂNCIA, MAS NÂO UTILI-
2018 ZADO
Causa Um subprograma foi declarado externamente, mas não é utilizado.
Solução Corrigir o programa de modo correspondente.
2019 ESPERA--SE UM SUBPROGR. EXTERNO, FUNÇÃO PRESENTE
Um subprograma foi declarado como externo. Entretanto, foi encontrada
uma função com o mesmo nome.
Exemplo:
DEFFCT INT Test(x:IN)
Causa
INT x
...
ENDFCTDEF P()
EXT Test(INT:IN)
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Test(x:IN)
INT x
Solução ...
END
DEF P()
EXT Test(INT:IN)
END
Systemmeldungen 05.03.01 pt 205 de 322
Mensagens de sistema
2020 Espera--se função externa, subprograma encontrado
Uma função foi declarada como externa. Entretanto, foi encontrado um
subprograma com o mesmo nome.
Exemplo:
DEF Test(x:IN)
Causa
INT x
...
ENDDEF P()
EXTFCT INT Test(INT:IN)
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEFFCT INT Test(x:IN)
Solução INT x
...
ENDFCTDEF P()
EXTFCT INT Test(INT:IN)
END
2021 A LISTA DE DADOS NÃO É DO TIPO ’PUBLIC’
As variáveis globais de arquivos DAT só podem ser utilizadas em arqui-
vos SRC com outro nome, quando o arquivo DAT foi declarado como
“PUBLIC”.
Exemplo:
DEFDAT P1
Causa
DECL GLOBAL INT a = 1
ENDAT
DEF P2()
a=2
END
Efeito O programa não pode ser executado.
Inserir a palavra--chave “PUBLIC” no cabeçalho do arquivo DAT. Even-
tualmente será necessário visualizar o cabeçalho através do menu
“CONFIGURAR --> FERRAMENTAS --> EDITOR --> LINHA DEF”.
Exemplo:
DEFDAT P1 PUBLIC
Solução DECL GLOBAL INT a = 1
ENDAT
DEF P2()
a=2
END
206 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2022 A variável de importação não declarada na lista de dados
Com a instrução IMPORT remete--se a uma variável que não existe na
Causa
citada lista de dados citada.
Efeito O programa não pode ser executado.
Verificar o nome.
Solução Verificar o caminho.
Declarar a variável.
2023 A variável de importação na lista de dados não está declarada.
Com a instrução IMPORT remete--se a uma variável que não existe na
Causa
citada lista de dados citada.
Efeito O programa não pode ser executado.
Verificar o nome.
Solução Verificar o caminho.
Declarar a variável.
2024 CONFLITO DE TIPO/DIMENS. NA IMPORT. DE VARIÁVEL
O tipo de dados e/ou a dimensão da variável de importação e da variável
da lista de dados, usada como referência, não coincidem.
Exemplo:
DEFDAT PROG_1 PUBLIC
Causa
DECL INT Hugo[2,2]
Hugo[2,2]=1
ENDDATDEF P()
IMPORT INT Hugo2IS /R1/PROG_1 .. Hugo
END
Efeito O programa não pode ser executado.
Verificar o tipo e a dimensão da variável de importação.
Exemplo:
DEFDAT PROG_1 PUBLIC
Solução DECL INT Hugo[2,2]
Hugo[2,2]=1
ENDDATDEF P()
IMPORT INT Hugo2[2,2]IS /R1/PROG_1..Hugo
END
Systemmeldungen 05.03.01 pt 207 de 322
Mensagens de sistema
2025 A declaração externa é diferente da declaração de SP/função
Causa A concordância externa não corresponde à declaração SP/função.
Efeito O programa não pode ser executado.
Solução Verificar a concordância externa.
2026 A concordância externa é diferente da declaração SP/função
Causa A concordância externa não corresponde à declaração SP/função.
Efeito O programa não pode ser executado.
Solução Verificar a concordância externa.
2027 INTERFACE DE IMPORTAÇÃO INCORRECTA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2028 PARÂMETROS DE EXT[FCT] E DEF[FCT] SÃO INCOMPATIVEIS
Os parâmetros especificados na instrução EXT não correspondem à
aqueles da concordância de subprograma.
Exemplo:
Causa DEF Test(x:IN)
INT x
ENDDEF P()
EXT Test()
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Test(x:IN)
Solução
INT x
ENDDEF P()
EXT Test(INT:IN)
END
208 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2029 ERRO DE SINTAXE NO MÓDULO
Causa Existe um erro de sintaxe no módulo.
Efeito O programa não pode ser executado.
Solução Verificar o código do programa no módulo.
2030 MÓDULO OCUPADO POR OUTRO PROCESSO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2031 MÓDULO NÃO EXISTENTE
Um módulo necessário não pode ser localizado, p. ex., porque ele não
foi declarado ou não foi declarado como global.
Exemplo:
DEFDAT P PUBLIC
Causa DECL CONST INT Hugo = 1
ENDDAT
DEF Up()
IMPORT INT Hugo
END
Efeito O programa não pode ser executado.
Verificar as especificações de caminho e nomes de módulo.
Declarar o módulo ou declarar como global.
Exemplo:
DEFDAT P PUBLIC
Solução DECL GLOBALCONST INT Hugo = 1
ENDDAT
DEF Up()
IMPORT INT Hugo
END
Systemmeldungen 05.03.01 pt 209 de 322
Mensagens de sistema
2032 COMANDO NÃO PERMITIDO
Causa O comando não é permitido.
Solução Alterar o comando de modo correspondente.
2033 ESPERA--SE FIM DE PASSO OU COMENTÁRIO
A sintaxe não foi mantida corretamente ou um comentário foi inserido
Causa
sem o caractere”;” na frente.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2034 INSERIR DIANTE DO PRIMEIRO PASSO NÃO AUTORIZADO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2035 NÚMERO DE PASSO INVÁLIDO
Causa O número do passo não é válido.
Solução Corrigir o número do passo de modo correspondente.
2036 DEPOIS DE ’ENDDAT’ SY É PERMITIDO COMENTÁRIO
Causa Após “ENDDAT” foi inserido um código de programação não permitido.
Efeito O programa não pode ser executado.
Remover o código de programa após “ENDDAT” ou retirar do comentá-
Solução
rio.
210 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2037 PASSO NÃO PERMITIDO OU DESCONHECIDO
O compilador não consegue processar a linha do programa.
P. ex., atribuição de duas constantes Enum: #Otto=#Emil ou inserir o
Causa código de programa no arquivo DAT.
A causa também pode ser um erro de escrita.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2038 DECLARAÇÃO NÃO ESTÁ NA SECÇÃO DECLARAÇÃO
Causa Uma declaração está fora da seção de declaração.
Efeito O programa não pode ser executado.
Solução Mover a declaração para dentro da seção de declaração.
2039 INSTRUÇÃO NÃO ESTÁ NA SECÇÃO INSTRUÇÃO
Causa Uma instrução está fora da seção de instrução.
Efeito O programa não pode ser executado.
Solução Mover a instrução para dentro da seção de instrução.
2040 VALOR INICIAL NÃO ESTÁ NA SECÇÃO INICIAL
Causa O valor inicial não está na seção inicial.
Solução Corrigir de modo correspondente.
2041 ERRO EM ’DEFDAT’, INSERÇÃO NÃO REALIZADA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 211 de 322
Mensagens de sistema
2042 “DEFDAT” NÃO AUTORIZADA
Causa ”DEFDAT” foi inserido em local não permitido.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2043 ERRO EM ’DEF’/’DEFFCT’ GLOBAL
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2044 “DEF”/“DEFFCT” NÃO PERMITIDO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2045 “END”/“ENDFCT”/“ENDDAT” NÃO PERMITIDO AQUI
“END”, “ENDFCT” ou a palavra--chave “ENDDAT” foi inserida em local
Causa
não permitido ou a sintaxe não foi mantida corretamente.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2046 “EXT”/“EXTFCT”/“IMPORT” NÃO PERMITIDO AQUI
Uma instrução “EXT”, “EXTFCT” ou “IMPORT” encontra--se em local não
Causa
permitido.
Efeito O programa não pode ser executado.
Solução Alterar programa.
212 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2047 OBJECTO AUSENTE
Causa Perguntou--se por um objeto que não existe.
Efeito O objeto não pode ser visualizado.
Solução Corrigir ou inserir novamente o nome do objeto.
2048 ERRO NA ENTRADA DA LISTA DE DADOS
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2049 VALOR INICIAL NÃO PERMITIDO AQUI
Causa O valor inicial não é permitido neste local.
Solução Alterar o programa de forma correspondente.
2050 String constante não permitida como parâmetro OUT.
Causa Uma constante String foi utilizada como parâmetro OUT.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2051 O NOME NA PRIM. LINHA DEVE SER IGUAL AO DO MOD.
O nome na primeira linha do programa não corresponde ao nome do mó-
Causa
dulo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 213 de 322
Mensagens de sistema
2052 NOME DE CAMPO NÃO PERMITIDO AQUI
Causa Um nome de campo foi utilizado em um local não permitido.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2053 VALOR INICIAL DO ÍNDICE INDICADO JÁ EXISTE
Causa O valor do índice já foi inicializado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2054 ESPERA--SE “=”
Causa O caractere “=” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2055 Espera--se constante de valor real.
Causa A constante utilizada não é do tipo Real.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2056 ESPERA--SE “{”
Causa O caractere “{” está ausente ou em local errado na linha do programa.
Efeito O programa não pode ser executado.
Solução Alterar programa.
214 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2057 Depois da vírgula só é permitida a gama de valores 0--7
Causa A gama de valores foi ultrapassada.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2058 NOME DA CONST. NÃO PERT. AO TIPO DE VARIÁVEL
Solução Alterar o programa de forma correspondente.
2059 CONSTANTE CADEIA DE CARACTERES DEMASIADO LONGA
A constante de cadeia de caracteres atribuída à respectiva variável é
muito longa.
Causa Exemplo:
STRUC Otto CHAR a
DECL Otto Hugo = {a “abcde”}
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
STRUC Otto CHAR a
DECL Otto Hugo = {a “a”}
2060 ÌNDICE DE CAMPO INDICADO NÃO PERMITIDO AQUI
Causa O índice de campo especificado não é permitido neste local.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
Systemmeldungen 05.03.01 pt 215 de 322
Mensagens de sistema
2061 COMP. NO MESMO SISTEMA INIC. VÁRIAS VEZES
Causa Cada componente pode estar contido uma única vez em cada sistema.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2062 POSSÍVEL PERDA DE INFORM. NA TRANSFORMAÇÃO DE TIPO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2063 ESPERA--SE UMA CONSTANTE INTEIRA, REAL OU CARACTER
Falta a especificação de um valor de número inteiro ou real, ou de uma
constante de caractere.
Causa Exemplo:
STRUC Otto INT a, REAL b
DECL Otto Hugo = { a , b}
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
STRUC Otto INT a, REAL b
DECL Otto Hugo = { a 1, b 2.2}
2064 ESPERA--SE UMA CONSTANTE INTEIRA OU CARACTER
Espera--se um caractere individual (não uma cadeia de caracteres) ou
Causa
uma constante de número inteiro.
Efeito O programa não pode ser executado.
Solução Alterar programa.
216 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2065 ESPERA--SE ’TRUE’ OU ’FALSE’
Causa Apenas “TRUE” ou “FALSE” são permitidos como atribuição.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2066 TIPO DE CTE. ENUM DIFERENTE DE TIPO DE VARIÁVEL ENUM
Causa Uma constante ENUM foi atribuída a uma variável ENUM de outro tipo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2067 INDICAÇÃO DE COMPONENTE DE CAMPO MULTIDIMENSIONAL
Causa A especificação de componente de campo é multidimensional.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2068 FALTA ÍNDICE DE CAMPO
Causa Falta o índice de campo.
Solução Alterar o programa de forma correspondente.
2069 A COMPONENTE NÃO É UM CAMPO
Solução Alterar o programa de forma correspondente.
Systemmeldungen 05.03.01 pt 217 de 322
Mensagens de sistema
2070 ESPERA--SE “#” OU NOME DE TIPO ENUM.
O caractere “#” foi esquecido ou foi utilizado um nome de tipo ENUM não
declarado.
Exemplo:
Causa
ENUM Emma e1,e2,e3
STRUC Hugo Emma a
DECL Hugo RealHugo = {a e1}
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução ENUM Emma e1,e2,e3
STRUC Hugo Emma a
DECL Hugo RealHugo = {a #e1}
2071 ESPERA--SE NOME DE TIPO DE ESTRUTURA
Solução Alterar o programa de forma correspondente.
2072 NOME DE TIPO NÃO ADEQUADO AO CONTEXTO
Solução Alterar o programa de forma correspondente.
2073 COMPONENTE NÃO PERTENCE A “FRAME” NEM A “POS”
Solução Alterar o programa de forma correspondente.
2074 ESPERAM--SE ÍNDICES CRESCENTES
Na primeira especificação de índice na linha de programa foi inserido um
valor maior do que na segunda.
Causa
Exemplo:
SIGNAL $DIGIN1 $IN[20] TO $IN[10]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
SIGNAL $DIGIN1 $IN[10] TO $IN[20]
218 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2075 NÚMERO DEMAS. PEQUENO
Causa O valor numérico é pequeno demais.
Solução Alterar o programa de forma correspondente.
2076 ESPERA--SE “IS”
A palavra--chave “IS” está ausente ou em local errado.
Exemplo:
DEFDAT PROG_1 PUBLIC
Causa DECL INT Otto = 1
ENDDAT
DEF P()
IMPORT INT Otto_2 /R1/PROG_1 .. Otto
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEFDAT PROG_1 PUBLIC
Solução DECL INT Otto = 1
ENDDAT
DEF P()
IMPORT INT Otto_2 IS /R1/PROG_1..Otto
END
2077 AGUARDA UMA CONSTANTE INTEIRA
Causa A constante não é de número inteiro.
Solução Alterar o programa de forma correspondente.
2078 ESPERAM--SE NOMES IDÊNTICOS DE SINAIS PRE--DEFINIDOS
Não foram especificadas apenas entradas ou saídas,de modo uniforme.
Causa Exemplo:
SIGNAL $DIGIN1 $OUT[20] TO $IN[29]
Efeito O programa não pode ser executado.
Alterar o programa de forma correspondente.
Solução Exemplo:
SIGNAL $DIGIN1 $IN[20] TO $IN[29]
Systemmeldungen 05.03.01 pt 219 de 322
Mensagens de sistema
2079 TIPO DE COMPONENTE DESCONHECIDO
Causa O tipo de componente não é conhecido.
Solução Alterar o programa de forma correspondente.
2080 VARIÁVEL DE PROTOCOLO DECLARADA IMPLICITAMENTE
Causa A variável de protocolo foi declarada implicitamente.
Solução Alterar o programa de forma correspondente.
2081 ESPERA--SE ’POS’, ’FRAME’, OU ’AXIS’
Solução Alterar o programa de forma correspondente.
2082 ESPERA--SE VARIÁVEL DE TIPO ESTRUTURA
Solução Alterar o programa de forma correspondente.
2083 ESPERA--SE SINAL PRÉ--DEFINIDO
É esperado um nome de sinal predefinido no sistema, porém foi encon-
trado um nome desconhecido.
Causa
Exemplo:
SIGNAL $DIGIN1 $xyz[20] TO $IN[29]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
SIGNAL $DIGIN1 $IN[20] TO $IN[29]
2084 ESPERA--SE NOME DE CANAL PRÉ--DEFINIDO
São permitidos apenas os nomes de interface predefinidos “SER_1” ou
Causa
“SER_2”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
220 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2085 ESPERA--SE “[”
Causa O caractere “[” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2086 FALTA LIMITE DE CAMPO
O limite de campo não foi especificado.
Causa Exemplo:
REAL vb[]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
REAL vb[4]
2087 ESPERA--SE “,”
Causa O caractere “,” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2088 ÍNDICE DE SINAIS DEMASIADO GRANDE
O índice de sinais situa--se fora das entradas ou saídas disponíveis.
Causa Exemplo:
SIGNAL $DIGIN1 $IN[200] TO $IN[5000]
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 221 de 322
Mensagens de sistema
2089 ESPERA--SE “..”
A seqüência de caracteres especificada “..” foi esquecida ou está em
local errado.
Causa
Exemplo:
IMPORT INT Otto_2 IS /R1/PROG_1 Otto
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
IMPORT INT Otto_2 IS /R1/PROG_1..Otto
2090 ESPERA--SE CAMPO DE CARACTERES UNIDIMENSIONAL
Solução Alterar o programa de forma correspondente.
2091 ESPERA--SE “IN” OU “OUT”
Na declaração de subprograma ou de função esqueceu--se de identificar
os parâmetros transferidos como “IN” ou”OUT”, ou existe um erro de es-
crita
Parâmetros IN: “Call byValue”.
Somente um valor é transferido, o valor da variável não pode ser alte-
rado pelo subprograma ou pela função.
Causa Parâmetros OUT: “Call by Reference”.
É transferida a posição de memória da variável, que portanto pode ser
descrita pelo subprograma ou pela função.
Exemplo:
DEF Prog(X:IN, Y:xx, Z:OUT)
INT X,Y,Z
...
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DEF Prog(X:IN, Y:OUT, Z:OUT)
INT X,Y,Z
...
222 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2092 ERRO DE SINTAXE NA DEFINIÇÃO DE CAMPO
A definição do campo não corresponde à sintaxe.
Exemplo:
Causa
DEF Hb(a[9]:IN)
INT a[]
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
DEF Hb(a[]:IN)
INT a[]
2093 ESPERA--SE UM NÚMERO INTEIRO POS. , “]” OU “,”
Não foi especificado um número inteiro positivo, a gama de valores foi
ultrapassada, ou os caracteres “]”ou “,” foram esquecidos. Ocorre na
maioria das vezes em concordâncias de índice.
Causa
Exemplo:
DECL CHAR Otto[--3]
Efeito O programa não pode ser executado.
Alterar programa.
Solução
Exemplo:
DECL CHAR Otto[3]
2094 SÃO PERMITIDAS NO MAX. TRÊS DIMENSÕES
O número máximo de três dimensões permitidas foi ultrapassado na de-
claração de campo.
Causa
Exemplo:
DECL INT Hugo[3,2,7,6]
Efeito O programa não pode ser executado.
Alterar programa.
Solução
Exemplo:
DECL INT Hugo[3,2,7]
Systemmeldungen 05.03.01 pt 223 de 322
Mensagens de sistema
2095 INDIC. RELAT. CAMINHO P_NÃO COMBINA COM AJUSTE HOME
Solução Alterar o programa de forma correspondente.
2096 ESPERA--SE “]” OU “,”
Um dos caracteres “]” ou “,” está ausente ou está em local errado.
Causa
Ocorre na maioria das vezes em declarações de campo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2097 VARIÁVEL TIPO ESTRUTURA NÃO AUTORIZADA
Causa Neste local não é permitida uma variável estrutural.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2098 VARIÁVEL NÃO DECLARADA NA LISTA DE DADOS
Solução Alterar o programa de forma correspondente.
2099 ÍNDICE DE CAMPO EXCEDE LIMITES DE CAMPO
O índice de campo especificado é maior que o limite de campo decla-
Causa
rado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2100 ESPERA--SE UM NUMERO INTEIRO POSITIVO
Só é permitido,exclusivamente, a especificação de um número positivo,
p. ex., na especificação do tamanho do campo.
Causa
Exemplo:
CHAR Hugo[0]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
CHAR Hugo[7]
224 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2101 INDICE DE CAMPO INCOMPATÍVEL COM AS DIM. DO CAMPO
Solução Alterar o programa de forma correspondente.
2102 LIMITE DE CAMPO DEMAS. GRANDE
Solução Alterar o programa de forma correspondente.
2103 NÃO EXISTE VARIÁVEL COM ESSE NOME
Causa Foi especificado um nome de variável inexistente.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2104 ESPEC. DO PARÂMETRO NA LISTA DE REG. NÃO PERMITIDA
Solução Alterar o programa de forma correspondente.
2105 O TIPO DE PARÂMETRO LOCAL ESTÁ DEF. LOCALMENTE
Solução Alterar o programa de forma correspondente.
2106 NÃO É PERMITIDO APAGAR O PASSO
Causa Houve uma tentativa não permitida de apagar um passo.
2108 ERRO TOKEN NO CÓDIGO I
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 225 de 322
Mensagens de sistema
2109 FALTA FIM DE PASSO CORRESPONDENTE
Causa Uma parte do programa não foi finalizada com a palavra--chave “END”.
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DEF Up()
...
END
2110 FIM DE CONTROLO DE ESTRUTURA INCORRECTO
Uma estrutura de controle é finalizada com uma palavra--chave incorreta,
Causa
p.ex., “LOOP” com “ENDWHILE”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2111 SUBPROGRAMA/FUNÇÃO MAL FINALIZADO
Foi utilizada uma palavra--chave final incorreta, p.ex., “END” no lugar de
“ENDFCT” ou vice--versa.
Exemplo:
Causa
DEFFCT REAL Ida(x1:IN)
...
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DEFFCT REAL Ida(x1:IN)
...
ENDFCT
226 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2112 IDENTIFICADOR NÃO DECLARADO
No subprograma ou função não foi atribuído o tipo de dados ao identifi-
Causa
cador, que é o nome do parâmetro de transferência.
Efeito O programa não pode ser executado.
Alterar o programa de forma correspondente.
Exemplo:
Solução DEF Prog(a:IN)
REAL a
...
2113 A VARIÁVEL DE PROTOC. DEVE SER DO TIPO ESTRUTURA
Causa A variável do protocolo não é do tipo estrutural.
Solução Alterar o programa de forma correspondente.
2114 NÃO HÁ INDICAÇÃO CORRECTA DE TIPO
Em uma declaração é utilizado um tipo de dado, cuja concordância é in-
correta.
Causa Exemplo:
ENUM Otto #Ottomotor
DECL Otto Otto1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
ENUM Otto Ottomotor
DECL Otto Otto1
2115 TIPO DE COMPONENTE NÃO DEF. OU INCORRECT. DEFINIDO
Foi inserido um tipo de componente que não foi ou foi declarado incorre-
tamente.
Causa Exemplo:
Enum Otto#Ottomotor
STRUC Willi Ottoa
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
Enum Otto Ottomotor
STRUC Willi Ottoa
Systemmeldungen 05.03.01 pt 227 de 322
Mensagens de sistema
2116 TIPO DE PARÂMETRO DEFINIDO LOCALMENTE
Solução Alterar o programa de forma correspondente.
2117 PASSO ENDDAT NÃO PRESENTE
Causa No final de um arquivo DAT falta a palavra--chave ENDDAT.
Efeito O respectivo arquivo SRC não pode ser executado.
Solução Alterar programa.
2118 TRANSFORMAÇÃO DE TIPO PARA VALOR INICIAL IMPOSSÍVEL
Solução Alterar o programa de forma correspondente.
2119 LUGAR DE COMPIL. INCOMP. COM LUGAR DE CHAMADA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2120 OBJ. DEVE SER DECL. NA LISTA DADOS OU IMPLICITAMENTE
Causa O objetivo não esta na lista de dados nem foi declarado implicitamente.
Solução Alterar o programa de forma correspondente.
2121 DIMENSÃO INCORRECTA
A dimensão do campo especificada não corresponde à dimensão decla-
rada.
Causa Exemplo:
DECL INT f[3]
f[4,3]=1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
DECL INT f[3]
f[2]=1
228 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2122 NOME NÃO DECLARADO COMO CAMPO
A variável foi especificada com índice, mas não está declarada como
campo.
Causa Exemplo:
INT Hugo
Hugo[3]=7
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
INT Hugo
Hugo=7
2123 NOME NÃO DECLARADO COMO FUNÇÃO
Um suposto valor de função é atribuído a uma variável. Na maioria das
vezes a suposta função esta definida como subprograma.
Exemplo:
INT i
Causa i=Prog()
...
DEF Prog()
...
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INT i
Solução i=Prog()
...
DEFFCT INT Prog()
...
ENDFCT
2124 VARIÁVEL NÃO DECLARADA NA LISTA DE DADOS
Causa É requisitada uma variável que deve estar declarada no arquivo DAT.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 229 de 322
Mensagens de sistema
2125 A COMPONENTE NÃO PERTENCE AO TIPO
É utilizado um componente que não consta na declaração de tipo de da-
dos.
Exemplo:
Causa
STRUC Otto INT a, REAL b
DECL Otto Emma
Emma.ccc=1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução STRUC Otto INT a, REAL b
DECL Otto Emma
Emma.a=1
2126 NAO É TIPO DE ESTRUTURA DE DADOS
A variável não possui nenhum tipo de dado estrutural.
Exemplo:
Causa
INT Hugo
Hugo.a=1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
INT Hugo
Hugo=1
2127 FALTA DECLARAÇÃO PARA PARÂMETRO FORMAL
Causa Um parâmetro formal não foi declarado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
230 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2128 ESPECIFICAR MAIS PARÂMETROS CORRENTES QUE FORMAIS
Na chamada de subprograma ou de função foram especificados mais
parâmetros atuais do que parâmetros formais na declaração de subpro-
grama ou de função.
Exemplo:
Causa Up(3,5,9)
...
DEF Up(a:IN,b:IN)
INT a,b
...
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Up(3,5)
Solução ...
DEF Up(a:IN,b:IN)
INT a,b
...
2129 PARÂMETRO FORMAL NÃO DEFINIDO
Não foi atribuído um tipo de dado aos parâmetros formais no subpro-
grama ou função.
Exemplo:
INT i
Causa i=1
Hb(i)
...
DEF Hb(a:IN)
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INT i
i=1
Solução Hb(i)
...
DEF Hb(a:IN)
INT a
...
END
Systemmeldungen 05.03.01 pt 231 de 322
Mensagens de sistema
2130 CONCLUSÃO APÓS INSTRUÇÃO DE REGRESSO NÃO PERM.
A conclusão após “RETURN” não é permitida.
Exemplo:
Causa DEF Up()
...
RETURN (1)
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DEF Up()
...
RETURN
END
2131 FALTA CONCLUSÃO APÓS A INSTRUÇÃO DE REGRESSO
Em uma função espera--se um valor de retorno após uma instrução RE-
TURN.
Exemplo:
Causa DEFFCT INT Otto()
INT a
...
RETURN
ENDFCT
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEFFCT INT Otto()
Solução INT a
...
RETURN(a)
ENDFCT
2132 NÃO SÃO AUTORIZADAS INTERFACES
Solução Alterar o programa de forma correspondente.
232 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2133 TIPO DEVE SER “POS”, “FRAME” OU “AXIS”
Solução Alterar o programa de forma correspondente.
2134 O OBJECTO NÃO TEM TIPO VÁLIDO
Solução Alterar o programa de forma correspondente.
2135 NOME NÃO DECLARADO COMO SP
É chamado um subprograma que não existe,p. ex., a partir de uma de-
Causa claração de Interrupt ou de trigger.
É chamada uma função como subprograma.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2136 SP LOCAL NÃO AUTORIZADO EM COMANDOS DE PROCESSO
Solução Alterar o programa de forma correspondente.
2137 NOME NÃO DECLARADO COMO VARIÁVEL SIMPLES
Não se trata de uma variável simples, que é descrita corretamente ape-
nas pelo seu nome, ou trata--se de uma variável que está sendo utilizada
no contexto errado.
No lugar do nome de uma variável simples foi utilizado, p, ex., o nome de
um subprograma, ou então trata--se de uma variável de campo que foi
utilizada sem índice.
Causa Exemplo 1:
DEF hhh()
hhh=1
END
Exemplo 2:
INT Hugo[3]
Hugo=1
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 233 de 322
Mensagens de sistema
2138 NENHUM NOME PARA UMA CONSTANTE DESTE TIPO
Foi especificado um nome de constante que não existe ou não é compa-
tível com o tipo de dado.
Exemplo:
Causa
ENUM cores azul, amarelo, vermelho
DECL cores Cor individual
Cor individual=#alaranjado
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução ENUM cores azul, amarelo, vermelho, alaranjado
DECL cores Cor individual
Cor individual=#alaranjado
2139 O TIPO PRÉ--DEFINIDO NÃO É UM TIPO DE DADOS ENUM.
Houve a tentativa de atribuir uma constante ENUM a uma variável que
não é uma variável ENUM.
Exemplo:
Causa
INT i
ENUM Erna e1,e2,e3
i=#e1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução ENUM Erna e1,e2,e3
DECL Erna RealErna
RealErna=#e1
2140 NENHUM TIPO DE DADOS ENUM. PRÉ--DEFINIDO
Solução Alterar o programa de forma correspondente.
234 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2141 INDEXAÇÃO OU [] NÃO AUTORIZADA
Um nome que não foi declarado como campo, foi munido de um índice
ou de parênteses retos.
Exemplo:
Causa
STRUC Otto INT a, REAL b
DECL Otto Hugo = { a 1, b 2.2}
Hugo.a[3]=7
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução STRUC Otto INT a, REAL b
DECL Otto Hugo = { a 1, b 2.2}
Hugo.a=7
2142 ESPERA--SE INDEXAÇÃO OU []
Um nome de variável de campo foi utilizado sem parênteses retos ou
Causa
especificação de índice.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2143 FIM DE ESTRUTURA DE CONTROLO AQUI INCORRECTO
A sintaxe para estruturas de controle foi violada.
Exemplo:
FOR i=1 TO 6
Causa ...
ELSE
...
ENDFOR
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução FOR i=1 TO 6
...
ENDFOR
Systemmeldungen 05.03.01 pt 235 de 322
Mensagens de sistema
2144 FALTA “ENDLOOP”
O loop “LOOP” não é finalizado através de “ENDLOOP”.
Exemplo:
Causa DEF Prog()
LOOP
...
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Prog()
Solução LOOP
...
ENDLOOP
END
2145 FALTA “ENDWHILE”
O loop “WHILE” não foi finalizado com “ENDWHILE”.
Exemplo:
DEF Prog()
Causa INT i
i=1
WHILE i<100
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Prog()
INT i
Solução i=1
WHILE i<100
...
ENDWHILE
END
236 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2146 FALTA “ENDFOR”
O loop “FOR” não foi finalizado com “ENDFOR”.
Exemplo:
DEF Prog()
Causa INT i
i=1
FOR i=1 TO 6
...
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Prog()
INT i
Solução i=1
FOR i=1 TO 6
...
ENDFOR
END
2147 FALTA “UNTIL”
O loop “REPEAT” não foi finalizado com “UNTIL”.
Exemplo:
DEF Prog()
Causa INT i
i=1
REPEAT
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Prog()
INT i
Solução i=1
REPEAT
i=i+1
UNTIL i>100
END
Systemmeldungen 05.03.01 pt 237 de 322
Mensagens de sistema
2148 FALTA “ENDIF”
Causa O loop “IF” não foi finalizado com “ENDIF”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2149 FALTA “ENDSWITCH”
Causa A instrução “SWITCH” não foi finalizada com “ENDSWITCH”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2150 “SWITCH” NÃO CONTÉM “CASE”
Causa A estrutura “SWITCH” não contém nenhum ramo “CASE”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2151 A “SWITCH” NÃO SE SEGUE “CASE”
Causa A estrutura “SWITCH” não contém nenhum ramo “CASE”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2152 “CASE”/“DEFAULT” APÓS “DEFAULT”
Causa O ramo “DEFAULT” contém uma palavra--chave “CASE” ou “DEFAULT”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
238 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2153 “EXIT” NÃO ESTÁ NO TRONCO DO LOOP
Causa A palavra--chave “EXIT” está fora de um loop.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2154 Nome não declarado como canal
Causa O nome não foi declarado como canal.
Solução Alterar o programa de forma correspondente.
2155 NOME NÃO DECLARADO COMO MARCA
Há uma tentativa de saltar com a instrução “GOTO” para uma marca que
Causa
não está definida.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2156 DESTINO DO SALTO NÃO DECLARADO LOCALMENTE
O destino do salto não foi declarado localmente, mas eventualmente está
na área não local.
Exemplo:
DEF Prog()
Marca:
Causa END
DEF Prog2()
GOTO Marca
END
No exemplo, ambos os programas estão situados no mesmo arquivo
SRC.
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Prog2()
Solução ...
Marca:
...
GOTO Marca
END
Systemmeldungen 05.03.01 pt 239 de 322
Mensagens de sistema
2157 DESTINO DO SALTO NÃO DECLARADO GLOBALMENTE
Solução Alterar o programa de forma correspondente.
2158 SALTO PARA UMA MARCA NÃO PERMITIDO
A marca encontra--se em uma estrutura de programa, p. ex., em uma
Causa
ramificação “SWITCH”, para a qual não é possível saltar.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2159 PARA ESTA MARCA EXISTE UM SALTO ERRADO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2160 ESPERA--SE ’THEN’
A instrução “IF” foi especificada de modo incompleto, falta a palavra--
chave “THEN”.
Sintaxe:
Causa
IF Expressão boleanaTHEN
Instruções
ENDIF
Efeito O programa não pode ser executado.
Solução Alterar programa.
2161 ESPERA--SE ’DO’
Na instrução de INTERRUPT ou de TRIGGER foi esquecida a palavra--
chave “DO”.
Sintaxe:
Causa INTERRUPT DECL PrioridadeWHEN CondiçãoDO Nome do subpro-
grama
TRIGGER WHEN DISTANCE = Ponto de comutaçãoDELAY = TempoDO
InstruçãoPRIO = Prioridade
Efeito O programa não pode ser executado.
Solução Alterar programa.
240 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2162 CARACTER INDICADO INCORRECTO
Foi introduzido um caractere que não faz sentido neste local.
Causa Exemplo:
$OUT[2b]=TRUE
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
$OUT[2]=TRUE
2163 NUMERO DEMASIADO GRANDE
Foi atribuído um número a uma variável, que ultrapassa a gama de valo-
Causa
res.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2164 FALTA “/” NA LOCALIZ. P_
Causa O caractere “/” foi esquecido.
Solução Inserir “/”
2165 SÍMBOLO GENÉRICO NÃO PERMIT.
Causa Foi utilizado um “joker” não permitido.
Efeito O programa não pode ser executado.
Solução Corrigir o programa de modo correspondente.
2166 NÃO É NOME DE OBJECTO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 241 de 322
Mensagens de sistema
2167 NOME DEMASIADO LONGO
Causa O nome especificado contém caracteres em excesso.
Solução Reduzir a número de caracteres.
2168 EXTENSÃO NÃO PERMITIDA
Causa A extensão especificada não é permitida.
Solução Utilizar uma extensão válida e permitida.
2169 LOCALIZ. INCORRECTA
Causa O caminho especificado não está correto.
Efeito A ação não é executada.
Solução Corrigir a especificação do caminho.
2170 CARACTER ’ESPAÇO’ NÃO PERMITIDO
Foram inseridos um ou mais caracteres de espaço, o que não é permi-
Causa
tido.
Solução Remover os caracteres de espaço.
2171 EXTENSÃO NÃO AUTORIZADA
Causa Foi especificada uma extensão que não é permitida neste local.
Solução Remover a extensão.
2172 CANAL--HANDLE ESPERADO
Causa É esperado um canal Handle.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
242 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2173 ESPERA--SE INDICAÇÃO DE LOCALIZ. ABSOLUTA
Causa O caminho especificado não está correto.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2174 ESPERA--SE “TO”
Causa Falta a palavra--chave “TO”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2175 ESPERA--SE NOME DE UTILIZADOR, SISTEMA OU NO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2176 ESPERA--SE “OBJ”, “NODE”, “USER”, “PERI”
Efeito O programa não pode ser executado.
Solução Alterar programa.
2177 ESPERA--SE “NODE”, “USER”, “PERI”
Efeito O programa não pode ser executado.
Solução Alterar programa.
2178 FALTA VALOR
Causa Não houve especificação de valor.
Solução Especificar valor.
Systemmeldungen 05.03.01 pt 243 de 322
Mensagens de sistema
2179 DEVE SEGUIR--SE “NODE”
Efeito O programa não pode ser executado.
Solução Alterar programa.
2180 CONST com várias variáveis não permitido
Causa Na declaração de constante estão especificadas várias variáveis.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2181 DEVE SEGUIR--SE “DEV”
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2182 AGUARDA UMA CONSTANTE OU VARIÁVEL
Falta a especificação de uma constante ou de uma variável.
Causa Exemplo:
ANOUT ON Fio = .5 * Fator + 1.0 DELAY =
Efeito O programa não pode ser executado.
Solução Alterar programa.
2183 OPÇÃO DEFINIDA DUAS VEZES
Causa Uma opção foi duplamente especificada.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2184 OPÇÃO ESPERADA DEPOIS DO SINAL MENOS
Causa Falta a opção depois do sinal Menos.
Efeito O programa não pode ser executado.
Solução Alterar programa.
244 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2185 AGUARDA UM NÚMERO DE PASSO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2186 NÚMERO DE PASSO DEVE SER POSITIVO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2187 É esperada uma cadeia de caracteres
Causa Na linha de programa é esperada uma cadeia de caracteres.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2188 É esperada uma cadeia de caracteres
Causa Na linha de programa é esperada uma cadeia de caracteres.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2189 NÚMERO DE PASSO INICIAL > NÚMERO DE PASSO FINAL
Causa O número do passo inicial é maior que o número do passo final.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2190 DEVE SEGUIR--SE NOME DO ATRIBUTO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 245 de 322
Mensagens de sistema
2191 DEVE SEGUIR--SE CONSTANTE PARA A CHAVE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2192 FALTA EXTENSÃO
Causa A extensão não foi especificada.
Solução Alterar o programa de forma correspondente.
2193 EXTENSÃO OU “.*” NÃO AUTORIZADA
Causa Foi especificada uma extensão ou o “joker” “.*”.
Solução Alterar o programa de forma correspondente.
2194 AGUARDA ’WHEN’
Na declaração de Interrupt ou de trigger foi esquecida a palavra--chave
Causa
WHEN.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2195 AGUARDA UM NOME DE CANAL
Causa Falta o nome do canal.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2196 ESPERA--SE LOCAL. ABS. DEPOIS DE NOME DE SIST./CANAL
Causa Não tem nenhum caminho absoluto após o nome do dispositivo / canal.
Efeito O programa não pode ser executado.
Solução Alterar programa.
246 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2197 ESPERA--SE “INFO”
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2198 ESPERA--SE “MESSAGE”
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2199 AGUARDA UMA CONSTANTE INTEIRA
Causa É esperada uma constante de número inteiro.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2200 ESPERA--SE Ki: 1<=I<=12
Efeito O programa não pode ser executado.
Solução Alterar programa.
2201 ESPERA--SE “+” OU “--”
Efeito O programa não pode ser executado.
Solução Alterar programa.
2202 ESPERA--SE “VAR”
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 247 de 322
Mensagens de sistema
2203 COMO OPÇÃO SOMENTE “I”, “B”, “H”, “V” PERMITIDO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2204 ERRO NO FIM DO PASSO
Causa O fim do passo contém erros.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2205 ESPERA--SE “SEC”, “FOR” OU “CLOCK”
Uma das palavras--chave “SEC”, “FOR” ou “CLOCK” falta ou está em
Causa
uma posição incorreta.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2206 FALTA NOME DO CANAL
Causa Não houve especificação do nome do canal.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2207 Nome não declarado como canal
Causa O nome não foi declarado como canal.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2208 DEVE SEGUIR--SE “DEL”
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
248 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2209 NECESSID. MEMÓRIA PARA VARIÁVEL DINAM. DEMAS. GRANDE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2210 ESPERA--SE “,”
Causa O caractere “,” está ausente ou está em uma posição incorreta.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2211 SIMB. NÃO É INÍCIO DE UMA IMPRESSÃO/ ATRIB. DE VALOR
Efeito O programa não pode ser executado.
Solução Alterar o programa
2212 MARCA NÃO DEFINIDA LOCALMENTE
Efeito O programa não pode ser executado.
Solução Alterar programa.
2213 STRUCE/ENUM não declarado na STRUC global
Efeito O programa não pode ser executado.
Solução Alterar programa.
2214 CAMPO CONTEM DEMAS. ELEMENTOS
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 249 de 322
Mensagens de sistema
2215 TIPO DEMAS. GRANDE
Efeito O programa não pode ser executado.
Solução Alterar programa.
2216 A ENTRADA NA TABELA DE SIMBOLOS NÃO E UMA MARCA
Efeito O programa não pode ser executado.
Solução Alterar programa.
2217 “USER”, “ACCESS” OU “COMMENT” ESPERADO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2218 PROFUNDIDADE DE EMPILHAM. DEM. GRANDE
Foram utilizadas estruturas de controle em excesso (p. ex.,.instruções IF
Causa
ou WHILE) dentro das mesmas estruturas de controle.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2219 ESPERA--SE OPERANDO OU EXPRESSÃO
Não foi especificado um operando ou uma expressão, ou então foi espe-
cificado um caractere que não pode ser interpretado como operando ou
Causa expressão.
Exemplo:
$OUT[*]=TRUE
Efeito O programa não pode ser executado.
Alterar o programa de forma correspondente.
Solução Exemplo:
$OUT[3]=TRUE
250 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2220 ESPERA--SE “)”
Causa O caractere “)” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2221 ESPERA--SE O NOME DA VARIÁVEL DE LOOP
Causa Falta o nome da variável de loop.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2222 TIPO DE IMPRESSÃO NÃO É IGUAL STAT_T
Causa O tipo de dado da impressão deve ser “STAT_T”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2223 TIPO DE IMPESSÃO NÃO É IGUAL INT,REAL,CHAR,BOOL,ENUM
O tipo de dado da impressão deve ser INT, REAL, CHAR, BOOL ou
Causa
ENUM.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2224 ESPERA--SE UMA CONSTANTE
Na linha de programa falta a especificação de uma constante, p. ex.,
Causa
após a palavra--chave “CASE”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 251 de 322
Mensagens de sistema
2225 ESPERA--SE UMA CONSTANTE NUMÉRICA INTEIRA POSITIVA
Causa É requisitada uma constante numérica inteira positiva.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2226 SÍMBOLO NÃO PERMITIDO
Causa Neste local não é permitido um sinal prévio.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2227 OPERANDO ESQUERDO DIFERENTE DE INT, REAL
Causa O operando esquerdo não possui o tipo de dado “INT” ou “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2228 OPERANDO DIREITO DIFERENTE DE INT, REAL
Causa O operando direito não possui o tipo de dado “INT” ou “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2229 AO DOIS OPERANDOS SÃO DIFERENTES DE INT, REAL
Causa Ambos os operandos não possuem o tipo de dado “INT” ou “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2230 OPERANDO ESQUERDO DIFERENTE DE INT, CHAR
Causa O operando esquerdo não possui o tipo de dado “INT” ou “CHAR”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
252 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2231 OPERANDO DIREITO DIFERENTE DE INT, CHAR
Causa O operando direito não possui o tipo de dado “INT” ou “CHAR”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2232 OS DOIS OPERANDOS SÃO DIFERENTES DE INT, CHAR
Causa Ambos os operandos não possuem o tipo de dado “INT” ou “CHAR”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2233 OPERANDO ESQUERDO NÃO É BOOLEANO
Causa O operando esquerdo não possui o tipo de dado “BOOL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2234 OPERANDO DIREITO NÃO É BOOLEANO
Causa O operando direito não possui o tipo de dado “BOOL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2235 OS DOIS OPERANDOS NÃO SÃO BOOLEANOS
Causa Ambos os operandos não possuem o tipo de dado “BOOL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 253 de 322
Mensagens de sistema
2236 OPERANDO ESQ. DIF. DE INT, REAL, CHAR, ENUM
O operando esquerdo não possui o tipo de dado “INT”, “REAL”, “CHAR”
Causa
ou “ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2237 OPERANDO DIREITO DIF. DE INT, REAL, CHAR, ENUM
O tipo de dado do operando direito não é “INT”, “REAL”, “CHAR” ou
“ENUM”.
Exemplo:
Causa INT i
i=7
IF i<TRUETHEN
...
ENDIF
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INT i
Solução i=7
IF i<10THEN
...
ENDIF
2238 OS DOIS OPER. DIFERENTES DE INT, REAL, CHAR, ENUM
O tipo de dado de ambos os operandos não é “INT”, “REAL”, “CHAR” ou
Causa
“ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2239 Tipos de operandos não são comparáveis
Os tipos de operandos especificados possuem tipos de dados diferentes
Causa
e não são comparáveis.
Efeito O programa não pode ser executado.
Solução Alterar programa.
254 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2240 OPERANDO ESQ. DIF. DE INT, REAL, BOOL, CHAR, ENUM
O tipo de dado do operando esquerdo não é “INT”, “REAL”, “BOOL”,
Causa
“CHAR” ou “ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2241 OPERANDO DIR. DIF. DE INT, REAL, BOOL, CHAR, ENUM
O tipo de dado do operando direito não é “INT”, “REAL”, “BOOL”,
Causa
“CHAR” ou “ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2242 OPERANDOS DIF. DE INT, REAL, BOOL, CHAR, ENUM
O tipo de dado dos operandos não é “INT”, “REAL”, “BOOL”, “CHAR” ou
Causa
“ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2243 Os tipos de operandos não são comparáveis
Os operandos possuem tipos de dados diferentes e não são compará-
veis.
Exemplo:
Causa
IF $IN[3]==1THEN
...
ENDIF
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução IF $IN[3]==TRUETHEN
...
ENDIF
Systemmeldungen 05.03.01 pt 255 de 322
Mensagens de sistema
2244 OPERANDO ESQUERDO DIFERENTE DE POS, FRAME
Causa O tipo de dado do operando esquerdo não é “POS” ou “FRAME”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2245 OPERANDO DIREITO DIFERENTE DE POS, FRAME
Causa O tipo de dado do operando direito não é “POS” ou “FRAME”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2246 OPERANDOS DIFERENTES DE POS, FRAME
Causa O tipo de dado dos operandos não é “POS” ou “FRAME”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2247 AMBOS LADOS DE ATRIB. DE VALOR INCOMPATIVEIS
Os tipos de dado dos objetos em ambos os lados do sinal de igualdade
são incompatíveis.
Causa
Exemplo:
$OUT[3]=1
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
$OUT[3]=TRUE
2248 EXPRESSÃO DIFERENTE DE INT, REAL
Causa É esperada uma expressão com o tipo de dado “INT” ou “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
256 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2249 EXPRESSÃO DIFERENTE DE INT
É esperada uma expressão com o tipo de dado “INT”.
Exemplo:
Causa INT i
FOR i=1.3TO 7
...
ENDFOR
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução INT i
FOR i=1TO 7
...
ENDFOR
2250 EXPRESSÃO DIFERENTE DE BOOL
Causa É esperada uma expressão com o tipo de dado “BOOL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2251 EXPRESSÃO DIFERENTE DE POS, FRAME
Causa É esperada uma expressão com o tipo de dado “POS” ou “FRAME”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2252 EXPRESSÃO DIFERENTE DE POS, FRAME, AXIS
É esperada uma expressão com o tipo de dado “POS”, “FRAME” ou
Causa
“AXIS”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
Systemmeldungen 05.03.01 pt 257 de 322
Mensagens de sistema
2253 ESPERA--SE UNA VARIÁVEL OU ELEMENTO DE CAMPO
No local onde é esperada uma variável ou elemento de campo, encon-
tra--se uma expressão não permitida.
Causa
Exemplo:
ANOUT ON Fio = .5 * 1
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
ANOUT ON Fio = .5 * RFator; sendo que “RFator” representa uma variá-
vel REAL do respectivo arquivo DAT.
2254 SELECÇÃO AQUI NÃO AUTORIZADA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2255 EXPRESSÃO DIFERENTE DE CHAR, INT, ENUM
É esperada uma expressão com o tipo de dado “CHAR”, “INT” ou
Causa
“ENUM”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2256 OPERANDO DIFERENTE DE INT, REAL
Causa É esperado um operando com o tipo de dado “INT” ou “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2257 OPERANDO DIFERENTE DE INT, CHAR
Causa É esperado um operando com o tipo de dado “INT” ou “CHAR”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
258 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2258 OPERANDO DIFERENTE DE BOOL
Causa É esperado um operando com o tipo de dado “BOOL”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2259 OPERANDO ESQUERDO: CAMPO OU LOCALIZ. NÃO PERMITIDO
O operando esquerdo não pode ser um campo ou um caminho.
Exemplo:
Causa INT x[9]
x[2]=13
IF x[]== 7 THEN
...
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução INT x[9]
x[2]=13
IF x[2]== 7 THEN
...
2260 OPERANDO DIREITO: CAMPO NÃO PERMITIDO
O operando direito não pode ser um campo.
Exemplo:
Causa INT x[9]
x[2]=13
IF 7 ==x[]THEN
...
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução INT x[9]
x[2]=13
IF 7== x[2]THEN
...
Systemmeldungen 05.03.01 pt 259 de 322
Mensagens de sistema
2261 OPERANDO DIREITO: CAMPO NÃO PERM. COM DIMENSÃO > 1
Causa A dimensão do operando direito não pode ser maior que 1.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2262 CAMPO COMO OPERANDO NÃO AUTORIZADO
Causa Aqui não é permitido ter um campo como operando.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2263 TIPO DE VARIÁVEL DE LOOP DIFERENTE DE INT
Para a variável de loop é permitido apenas o tipo de dado “INTEGER”.
Exemplo:
Causa DECLREALi
FOR i = 1 TO 5
...
ENDFOR
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DECL INTi
FOR i = 1 TO 5
...
ENDFOR
2264 TIPO D.EXPRESSÃO NÃO CORRESPONDE A “MODUS_T”
Causa O tipo de dado da expressão deve ser “MODUS_T”.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2265 ESPERA VÍRGULA OU “)”
Causa Falta a vírgula ou “)”, ou estes estão situados no local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
260 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2266 TIPO COMPONENTE INCOMPATÍVEL COM O TIPO VALOR INICIAL
Efeito O programa não pode ser executado.
Solução Alterar programa.
2267 LADO ESQUERDO: CAMPO NÃO AUTORIZADO
No lado esquerdo da expressão não pode haver um campo, mas even-
tualmente pode ser especificado um elemento de campo.
Causa
Exemplo:
$OUT[ ]=TRUE
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
$OUT[3]=TRUE
2268 LADO DIREITO: CAMPO NÃO AUTORIZADO
No lado direito da expressão não pode haver um campo, mas eventual-
mente pode ser especificado um elemento de campo.
Causa
Exemplo:
$OUT[3 ]=$IN[]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
$OUT[3]=$IN[5]
2269 DIR. CONST. DE CAD. DE CARACT. DIR.=>INDEXAÇÃO ESQ.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2270 TIPO DA ESQUERDA INCOMPATÍVEL COM TIPO DA DIREITA
Causa Os tipos de dados do operando esquerdo e direito são incompatíveis.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 261 de 322
Mensagens de sistema
2271 PEDE--SE FIM DE LOCALIZAÇÃO (CAMPO!)
Efeito O programa não pode ser executado.
Solução Alterar programa.
2272 FIM DE LOCALIZAÇÃO NÃO PERMITIDO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2273 CAMPO NÃO PERMITIDO
Causa Neste local não pode ser especificado um campo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2274 Tipo de parâmetro atual/formal incompatível
Os parâmetros na chamada de subprograma ou de função não são com-
patíveis com a declaração de subprograma ou de função.
Exemplo:
BOOLb
Causa b=TRUE
up(b)
...
DEF up(var:IN)
INTvar
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INTb
b=4
Solução
up(b)
...
DEF up(var:IN)
INT var
END
262 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2275 Tipo de parâmetro atual/formal incompatível
Os parâmetros na chamada de subprograma ou de função não são com-
patíveis com a declaração de subprograma ou de função.
Exemplo:
BOOLb
Causa b=TRUE
up(b)
...
DEF up(var:IN)
INTvar
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INTb
b=4
Solução up(b)
...
DEF up(var:IN)
INT var
END
2276 DIMENSÃO NÃO CONCORDA
Efeito O programa não pode ser executado.
Solução Alterar programa.
2277 DIMENSÃO D.CAMPO SUPERIOR A 1 NÃO PERMITIDO AQUI
Efeito O programa não pode ser executado.
Solução Alterar programa.
2278 VAL. DE RETORNO: CONST. DE CADEIA DE CAMPO NÃO PERM.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 263 de 322
Mensagens de sistema
2279 TIPO DE VAL. DE RETORNO INCOMP. COM O TIPO DE FUNÇÃO
O valor de retorno da função não corresponde ao tipo de função.
Exemplo:
DEFFCT BOOLalf()
Causa REALHugo
Hugo=1
RETURN(Hugo)
ENDFCT
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEFFCT REALalf()
Solução REAL Hugo
Hugo=1
RETURN(Hugo)
ENDFCT
2280 OPER. DIR. :PARENT. PROIB., POIS IMPRES. DE CAMINHO
Causa O operando direito não pode ficar entre parênteses.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2281 PARENT. SOBRE EXPRES. DE LOCALIZ. PROIBIDOS
Causa Expressões de caminho não podem ficar entre parênteses.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2282 PRIMEIRA CONST. INCOMPATÍVEL COM ESTA CONST.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
264 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2283 TIPO DE CONST. INCOMPAT. COM O TIPO DE IMPRES. EM SWIT
Efeito O programa não pode ser executado.
Solução Alterar programa.
2284 SELECÇÃO DE CAMPOS COMO UNIDADE NÃO PERMITIDA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2285 ESPERA--SE NOME DE COMPONENTE
Não foi especificado um nome de componente, p. ex.,. no sistema de
uma estrutura.
Causa Exemplo:
STRUC Otto INT a, REAL b
DECL Otto Hugo ={ 1, b 2.2}
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
STRUC Otto INT a, REAL b
DECL Otto Hugo = { a1, b 2.2}
2286 COMPONENTE COM DUPLA DEFINIÇÃO
Um nome de componente foi especificado duas vezes, p. ex.,. no sis-
tema de uma estrutura.
Causa
Exemplo:
STRUC Otto INT a, REAL b
DECL Otto Hugo = {a 1, b 2.2, a 4}
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
STRUC Otto INT a, REAL b
DECL Otto Hugo = { a 1, b 2.2}
Systemmeldungen 05.03.01 pt 265 de 322
Mensagens de sistema
2287 ESPERA--SE “,” OU “}”
Causa Um dos caracteres “,” ou “}” está ausente ou está em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2288 ESPERA--SE “]”
O caractere “]” está ausente ou em local errado.
Causa Exemplo:
SIGNAL Hugo $OUT[2
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
SIGNAL Hugo $OUT[2]
2289 ZONA INDICADA DE FORMA INCORRECTA
Efeito O programa não pode ser executado.
Solução Alterar programa.
2290 ESPERA--SE UMA CONSTANTE
Causa É esperada a especificação de uma constante.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2291 ESPERA--SE UM NOME DE TIPO DE DADO DE ESTRUTURA
Efeito O programa não pode ser executado.
Solução Alterar programa.
266 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2292 NÃO É NOME DE TIPO DE DADOS: PROIB. NOVA DEF.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2293 COMPONENTE NÃO DECLARADA COMO CAMPO
Causa O componente não foi combinado como campo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2294 ESPERA--SE “#”
Causa O caractere “#” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2295 COMPONENTES DE CAMPO NÃO PODEM SER INDEXADAS
Causa Houve uma tentativa de indexar um componente de campo.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2296 NENHUM NOME DE CONSTANTE DO TIPO
Causa O nome da constante não é compatível com o tipo de dado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 267 de 322
Mensagens de sistema
2297 COMP. DECLARADA COMO CAMPO: ESPERA--SE INDEXAÇÃO
No caso deste componente trata--se de um campo, para uma atribuição
Causa
inequívoca é necessária uma indexação.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2298 TIPO DE SISTEMA (POS) INCOMPATÍVEL COM O CONTEXTO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2299 TIPO DE CONSTANTE ESPERADO DESCONHECIDO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2300 NÃO É NOME DE TIPO DE DADOS DE ENUM.
Causa É esperado um nome de tipo de dado de enumeração.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2301 NÃO É UM COMPONENTE DE EIXO
Causa É esperado um componente com o tipo de dado “AXIS”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
268 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2302 NÃO É UM COMPONENTE DE FRAME
Causa É esperado um componente com o tipo de dado “FRAME”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2303 NÃO É UM COMPONENTE DE POS
Causa É esperado um componente com o tipo de dado “POS”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2304 FIM DE LISTA DE PARÂMETROS INCORRECTO
A lista de parâmetros não foi finalizada corretamente.
Exemplo:
DEF Up(x:IN)
INT x
END
Causa
DEF Prog()
INT Var
Var= 1
Up(Var; )
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF Up(x:IN)
INT x
END
Solução
DEF Prog()
INT Var
Var= 1
Up(Var)
END
Systemmeldungen 05.03.01 pt 269 de 322
Mensagens de sistema
2305 ESPERA--SE NOME DE UM SUBPROGRAMA
Causa É esperado o nome de um subprograma.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2306 LOCALIZ. RELATIVA NÃO PERMITIDA
Efeito O programa não pode ser executado.
Solução Alterar programa.
2307 ESPERA SINAL DE ENTRADA ANALÓGICA
Causa É esperado um sinal de entrada analógica.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2308 ESPERA ENTRADA DIGITAL
Causa É esperada uma entrada digital.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2309 ESPERA--SE “(”
Causa O caractere “(” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
270 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2310 ENTRADA DIGITAL NÃO PERMITIDA AQUI
Causa Neste local não é permitida uma entrada digital.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2311 TIPO DE PARÂMETRO FORMAL INCORRECTO
Causa O tipo de parâmetro formal é inválido.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2312 PROGRAMA NÃO DISPONÍVEL
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2313 NÃO HÁ ERRO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2314 NENHUMA ESPECIFICAÇÃO DE NOME DE OBJECTO
Causa Nenhum nome de objeto foi especificado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 271 de 322
Mensagens de sistema
2315 NOME DE OBJECTO DEMASIADO LONGO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2316 O NOME DO OBJECTO NÃO DEVE CONTER NENHUM “.”
Efeito O programa não pode ser executado.
Solução Alterar programa.
2317 O NO. HIERÁRQUICO NÃO SE ENCONTRA NA LOCAL. DE BUSCA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2318 OS PARÂMETROS DEVEM ESTAR DECLARADOS NO MÓDULO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2319 ESPERA--SE “ON”, “OFF”, “ENABLE”, “DISABLE”, “DECL”
Falta uma das palavras--chave “ON”, “OFF”, “ENABLE”, “DISABLE” ou
“DECL”, ou a mesma está em local errado.
Causa
Exemplo:
INTERRUPT
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
INTERRUPT ON
272 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2320 O NOME DO SINAL NÃO DEVE SER MODIFICADO
Causa O nome do sinal foi alterado, o que não é permitido.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2321 O SINAL PRÉ--DEFINIDO NÃO DEVE SER MODIFICADO
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
2322 OS TIPOS DE SINAL ANTIGO/NOVO SÃO DIFERENTES
Efeito O programa não pode ser executado.
Solução Alterar programa.
2323 O TIPO DE SINAL NÃO DEVE SER MODIFICADO
Efeito O programa não pode ser executado.
Solução Alterar programa.
2324 DECLARAÇÃO DUPLA
Causa O nome utilizado já foi atribuído a outro objeto.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2325 TIPO DESCONHECIDO
Em uma declaração foi utilizado um tipo de dado, que não havia sido
Causa
previamente combinado ou que não é conhecido localmente.
Efeito O programa não pode ser executado.
Solução Alterar programa.
Systemmeldungen 05.03.01 pt 273 de 322
Mensagens de sistema
2326 ESPERA--SE UM NOME
Na expressão falta a especificação de um nome ou a especificação não
corresponde às regras, como uma seqüência de algarismos pura em
Causa nome da variável.
Exemplo:
BOOL
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
BOOL Hugo
2327 ESPERA--SE UM TIPO
É esperada a especificação de um tipo de dado.
Exemplo:
Causa DEFFCT Ida(x1:IN)
...
ENDFCT
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução DEFFCT REALIda(x1:IN)
...
ENDFCT
2328 ESPERA--SE “:”
Causa O caractere “:” está ausente ou em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
274 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2329 COMBINAÇÃO INTERDITA DE SINAIS ANALÓGICOS
Efeito O programa não pode ser executado.
Solução Alterar programa.
2330 ESPERA--SE NOME DE UM SINAL
Falta o nome de um sinal na linha de programa.
Causa Exemplo:
ANOUT OFF
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
ANOUT OFF $ANOUT[2]
2331 ESPERA SINAL DE SAÍDA ANALÓGICA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2332 ELEM. DE CAMPO/VARIÁVEL NÃO É DO TIPO REAL
Na linha de programa é esperado um elemento de campo ou uma variá-
Causa
vel do tipo de dado “REAL”.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2333 ESPERA--SE “*”
O caractere “*” está ausente ou em local errado.
Causa Exemplo:
ANOUT ON Fio = .5 Valor
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
ANOUT ON Fio = .5 *Valor
Systemmeldungen 05.03.01 pt 275 de 322
Mensagens de sistema
2334 ESPERA--SE UMA CONST. REAL, VAR. OU ELEM. DE CAMPO
É requisitada uma constante real, variável ou elemento de campo.
Causa Exemplo:
ANOUT ON Fio = .5 * Fator + 1
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
ANOUT ON Fio = .5 * Fator + 1.0
2335 SINAL COMBINADO MAIOR QUE 32 BIT
Podem ser combinadas no máximo 32 entradas ou saídas em um sinal.
Exemplo:
Causa
SIGNAL $DIGIN1 $IN[200] TO $IN[232]
(corresponde a 33 entradas)
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
SIGNAL $DIGIN1 $IN[200] TO $IN[231]
2336 ESPERA--SE “ON” OU “OFF”
Na linha de programa falta a palavra--chave “ON” ou “OFF”.
Causa Exemplo:
ANOUT $ANOUT[2]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
ANOUT OFF$ANOUT[2]
276 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2337 LIMITES DE CAMPO EM ESPECIF. DE PARÂM. NÃO AUTORIZ.
Em uma especificação de parâmetro foram inseridos limites de campo.
Exemplo:
Causa
DEF Hb(a[]:IN)
INT a[5]
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
DEF Hb(a[]:IN)
INT a[]
2338 NO PARAM. DE ESPECIF., LIMITE DE CAMPO NÃO AUTORIZ.
Em uma especificação de parâmetro foram inseridos limites de campo.
Exemplo:
Causa
DEF Hb(a[]:IN)
INT a[5]
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
Solução
DEF Hb(a[]:IN)
INT a[]
2339 APRENDIZAGEM PARA TIPO NÃO PERMITIDO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2340 COMPILAR NOVAMENTE O PASSO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 277 de 322
Mensagens de sistema
2341 ESPERA--SE CONSTANTE INTEIRA DIFERENTE DE 0
Falta a especificação de uma constante de número inteiro diferente de 0.
Exemplo:
INT i
Causa i=1
FOR i=1 TO 7 STEP
...
ENDFOR
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
INT i
Solução i=1
FOR i=1 TO 7 STEP2
...
ENDFOR
2342 NOME COM COMPR. SUPERIOR A 24 CARACTERES
Causa O nome não pode ser formado por mais de 24 caracteres.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2343 PROCEDIMENTO GLOBAL NÃO PRESENTE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2344 Espera--se ’DISTANCE’ ou “PATH”
Uma das palavras--chave “DISTANCE” ou “PATH” falta ou está em local
Causa
errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
278 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2345 ESPERA--SE “DELAY”
Causa A palavra--chave “DELAY” foi esquecida ou está em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2346 ESPERA--SE “PRIO”
Causa A palavra--chave “PRIO” foi esquecida ou está em local errado.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2347 Valor para PRIO não permitido
O valor especificado para a prioridade está fora da gama permitida.
Causa Exemplo:
INTERRUPT ON 522
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
INTERRUPT ON 22
2348 ’DISTANCE’ permitido só 1 ou 0
Ao ponto de comutação “DISTANCE” podem ser atribuídos exclusiva-
Causa
mente os valores 1 ou 0.
Efeito O programa não pode ser executado.
Solução Alterar o programa de forma correspondente.
Systemmeldungen 05.03.01 pt 279 de 322
Mensagens de sistema
2349 Atribuição à constante não permitida
Houve uma tentativa de atribuir um valor a uma constante.
Exemplo:
Causa
DAT--File: DECL CONST INT Lasse
SRC--File: Lasse = 5
Efeito O programa não pode ser executado.
Alterar programa.
Solução Exemplo:
DAT--File: DECL CONST INT Lasse = 5
Utilização de dados referentes a tempos de execução do programa
2350 principal não permitida
Em um subprograma não podem ser utilizadas as variáveis de tempo de
execução do programa principal, mesmo quando ambos os programas
foram combinados em um arquivo SRC.
Exemplo:
DEF P()
Causa INT x
x=1
END
DEF P2()
x=2
END
Efeito O programa não pode ser executado.
Alterar programa.
Exemplo:
DEF P()
INT x
x=1
Solução END
DEF P2()
INT x
x=2
END
280 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2351 Utilização de dados referentes ao tempo de execução não permitida
Os dados de tempo de execução não podem ser utilizados.
Exemplo:
DEF P()
Causa DECL INT xxx
xxx = 1
INTERRUPT DECL 10 WHEN TRUE DO Up(xxx)
...
END
Efeito O programa não pode ser executado.
No lugar de variáveis de tempo de execução, utilizar variáveis permanen-
tes de um arquivo DAT.
Exemplo:
DEFDAT P
Solução DECL INT xxx = 1
ENDDATDEF P()
INTERRUPT DECL 10 WHEN TRUE DO Up(xxx)
...
END
2352 $OUT_C(n) aqui não admissível
$OUT_C[n] não pode ser utilizado nas declarações de Trigger ou de In-
Causa
terrupt, ou no lado direito de um atribuição.
Efeito O programa não pode ser executado.
Solução Alterar programa.
2353 Sinal OUT_C composto não permitido
Efeito O programa não pode ser executado.
Solução Alterar programa.
2354 Não foi encontrado endspline apropriado
Causa Não foi encontrado um Endspline apropriado para Spline.
Efeito A sintaxe do programa não está correta.
Solução Alterar o programa de forma correspondente.
Systemmeldungen 05.03.01 pt 281 de 322
Mensagens de sistema
2355 Instrução no spline block não permitida
Causa Uma instrução proibida foi utilizada em um Splineblock.
Efeito Erro de sintaxe programa.
Solução Alterar o programa de forma correspondente.
2356 Opção Tool/Base não está correta
Causa A opção TB de instrução LIN_REL não foi programada corretamente.
Efeito É emitido um aviso relativo ao erro de sintaxe do programa.
Solução Alterar o programa de forma correspondente.
2357 Erro de sintaxe na opção WITH
Causa Na opção WITH foi detectado um erro de sintaxe.
Efeito A sintaxe do programa não está correta.
Solução Alterar o programa de forma correspondente.
2358 Opção WITH proibida fora de spline
Causa Foi programada uma opção WITH fora de um Splineblock.
Efeito Erro de sintaxe no módulo
Solução Alterar o programa de forma correspondente.
2359 Este KRL statement não pode ser usado dentro de um spline
Causa Em um splineblock foi encontrado um KRL statement não permitido.
Efeito Erro de sintaxe no módulo
Solução Alterar o programa de forma correspondente.
282 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2360 Parâmetros de aproximação não permitidos no spline
Foram programados parâmetros de aproximação dentro de um spline-
Causa
block.
Efeito Erro de sintaxe no módulo
Solução Alterar o programa de forma correspondente.
2361 Não é possível importar para variáveis globais
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Todos os componentes de variáveis / tipo GLOBAL têm de ser
2362 GLOBAL
Tipo GLOBAL ou variável GLOBAL possui componentes que não são
Causa
GLOBAL.
Efeito Erro no programa devido a tabelas de símbolos incorretas.
2700 <Nome de objeto> Passo não existente
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2701 ENTRADA PASSO <Nome do objeto> DEMAS. LONGA
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
ENTR. DE PASSO <Nome do objeto> DEMAS. LONGA OU FINALIZ.
2702 INCORR.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 283 de 322
Mensagens de sistema
2703 CAMPO <Nome do objeto> CONTEM DEMASIADOS ELEMENTOS
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2704 <Nome do objeto> NÃO TEM MEMORIA DINAMICA LIVRE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2705 <Nome do objeto> NÃO PODE SER FORMATADO
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2706 DESCOMPILAR <Nome do objeto> IMPOSSIVEL
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2707 <Nome de objeto> Passo não existente
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2708 PROFUNDIDADE DE EMPILHAM. <Nome do objeto> DEM. GRANDE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
284 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2709 <Nome do objeto> EXTENSAO DA LISTA DE LINKS IMPOSS.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2710 <Nome do objeto> DEMASIADOS SUBPROGRAMAS LOCAIS
Efeito O programa não pode ser executado.
Solução Alterar programa.
2711 <Nome do objeto> ALCANCOU DIMENSÃO MAXIMA
Quando um componente atingiu o tamanho máximo (65536 Bytes), então
Causa aparece um aviso, p. ex., “SRC ATINGIU O TAMANHO MÁXIMO E NÃO
PODE SER ATRIBUÍDO”.
Solução Reduzir o tamanho de modo correspondente.
2712 <Nome do objeto> FALTA MEMORIA: ABERTURA IMPOSSIVEL
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2713 <Nome do objeto> NAO HA MEMORIA FISICA LIVRE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2714 <Nome do objeto> NAO HA MEMORIA VIRTUAL LIVRE
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 285 de 322
Mensagens de sistema
2800 ERRO DE COMPILAÇÃO INTERNO <Nome do objeto>
Causa Ocorreu um erro no compilador.
Efeito O programa não pode ser executado.
Reinicializar a unidade de comando.
Solução
Eventualmente alterar programa.
<Nome do objeto> ERRO NA GESTÃO DE MEMORIA <Número do
2801 erro>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2803 ERRO INDEFINIDO DE SINTAXE
Causa Ocorreu um erro de sintaxe desconhecido:
Efeito O programa não pode ser executado.
Solução Alterar programa.
ERRO INTERNO (arquivo: <Nome do arquivo>, linha: <Número da
2804 linha>, valor: <Valor de retorno>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
ERRO INTERNO (arquivo: <Nome do arquivo>, linha: <Número da
2805 linha>, valor: <Valor de retorno>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2806 A área de travamento <Nome ws> foi liberada manualmente
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
286 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Surgiu um deadlock. Os programas encontram--se nesse estado
2807 <WorkspaceName> <RemoteProgram>’ (<RemoteKrc>)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
O travamento <Nome ws> foi realizado na ordem errada. Deadlock
2808 possível.
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2809 A zona de travamento <Nome ws> não existe <Nome KRC>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2810 Esta zona de travamento não está definida
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2811 Não é possível conectar a <Nome KRC>. Verificar a conexão
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2812 A área de travamento <ws name> não pode ser liberada
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 287 de 322
Mensagens de sistema
A zona de travamento <Nome ws> não está bloqueada por um
2813 outro programa
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
A área de trabalho <ws name> pertence momentaneamente a outro
2814 programa
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2815 A zona de trabalho foi modificada. O programa deve ser atualizado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2816 Erro de sistema interno mutual exclusion
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2817 Confirmar erro de bateria do codificador <Eixo>
Causa Ocorreu uma falha de bateria no codificador do eixo indicado.
Solução Trocar a bateria.
2818 Confirmar avaria do ventilador do armário
Causa O ventilador no armário falhou.
Efeito Sobreaquecimento do hardware no armário.
Solução Verificar o ventilador e substituir, se for necessário.
288 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2819 Confirmação seleção de passo no subprograma já está ativa
Este aviso aparece somente quando LINE_SEL_LOCAL_SUB está em
Causa
processo.ini TRUE.
Confirmação seleção de passo no subprograma durante <#BSTEP /
2820 Interrupt> não é permitida
Esta mensagem aparece, quando no arquivo “progress.ini”
LINE_SEL_LOCAL_SUB é definido como TRUE.
Causa O usuário tentou selecionar a instrução de uma subrotina local, que não
se encontra no Caller Stack, enquanto era executado o programa modo
# BSTEP ou um Interrupt.Isto não é permitido.
Alterar o programa de forma correspondente.
Solução
Confirmar mensagem.
2821 $ORI_TYPE definido implicitamente com #VAR
$IPO_MODE está em f #TCP (TCP externo) e $ORI_TYPE em #JOINT.
Causa Esta combinação não é possível.
Esta mensagem é emitida somente nos modos de operação T1 e T2.
Efeito $ORI_TYPE é ajustado implicitamente em #VAR.
Ajustar $IPO_MODE em #BASE ou $ORI_TYPE em #VAR ou #CON-
Solução
STANT.
Aproximação #ORI_TYPE=#VAR/#CONSTANT para
2822 $ORI_TYPE=#JOINT não é possível
Ângulo de eixo inconsistente na aproximação CP--CP de
$ORI_TYPE=#VAR ou #CONSTANT após $ORI_TYPE=#JOINT. Isso
Causa
ocorre quando, durante o movimento não--OriJoint CP, um dos ângulos
de eixo manual gira muito forte (ver também a mensagem n.º 1491).
Efeito É realizada uma “parada exata”.
Evitar uma rotação muito forte do ângulo de eixo manual durante um mo-
Solução
vimento não--OriJoint.
Systemmeldungen 05.03.01 pt 289 de 322
Mensagens de sistema
A zona de trabalho solicitada não é gerida pelo gerenciador de
2823 zonas de trabalho selecionado
Causa O gestor configurado para a zona de trabalho não está correto.
Efeito ENTERSPACE falhou. O programa precisa ser cancelado.
Solução Deve ser registrado o gestor correto para a zona de trabalho .
A zona de trabalho ’<WorkspaceName>’ foi liberada manualmente
2824 numa unidade de comando remota (<KrcName>)
A zona de trabalho foi liberada manualmente através de uma unidade de
Causa
comando remota.
Efeito A zona de trabalho foi liberada e o próximo solicitante recebe a mesma.
Um programa submit não pode executar instruções referentes ao
2825 Workspace Sharing
Uma instrução da zona de trabalho foi executada no interpretador Sub-
Causa mit.
Isto não é permitido.
A instrução da zona de trabalho precisa ser removida do programa Sub-
Solução
mit.
Os programas locais possuem demasiadas zonas de trabalho. Com
2826 “Release All’ as zonas de trabalho são novamente liberadas
Excessivas zonas de trabalho foram tomadas por esta unidade de co-
Causa
mando. O máximo permitido é 32 zonas de trabalho.
Efeito Esta zona de trabalho não pode ser atribuída à unidade de comando.
Solução O usuário deve liberar zonas de trabalho não utilizadas.
O gerenciador de zonas de trabalho foi configurado por forma a ser
2827 gerenciado por um gerenciador remoto
Várias unidades de comando estão registradas como gerenciador (admi-
Causa
nistrador) desta zona de trabalho.
Efeito É permitido apenas um gerenciador para uma zona de trabalho.
É preciso configurar um gerenciador inequívoco para a zona de trabalho
Solução
dentro da célula.
290 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
O novo proprietário (<Nome krc>) da zona de trabalho ’<Work-
2828 spacename>’ não é acessível. Erro de conexão à rede.
A atribuição de zona de trabalho não pôde ser executada, pois o novo
Causa
proprietário da zona de trabalho não estava acessível.
O proprietário da zona de trabalho vai aguardar junto à zona de trabalho,
Efeito
visto que ele não recebe a mensagem de que a zona está liberada.
Solução Verificar a conexão de rede.
OriJoint não é possível. Configuração dos pontos de início e de
2829 destino é diferente
Em um movimento OriJoint, a “configuração tipo cotovelo” (eixo 2/3) do
ponto de destino do movimento é diferente daquela do ponto de início.
Causa
Isto significaria que o ponto de destino não é atingido com a orientação
programada.
Efeito O movimento não pode ser executado com $ORI_TYPE=#JOINT.
Ajustar $ORI_TYPE=#VAR ou #CONSTANT.
Solução
Alterar a orientação do ponto de destino.
2830 Movimentos PTP para frames em movimento não são permitidos
Não são permitidos movimentos PTP em relação a frames em movi-
Causa
mento.
Aprendizagem do ponto de destino em relação a um frame fixo, como
Solução
WORLD, ou execução como um movimento cartesiano (p. ex., LIN).
2832 O nome da zona de trabalho já existe. Introduza um nome diferente
Causa O nome da zona de trabalho já existe.
O nome não pode ser utilizado.
Solução
Escolha um outro nome inequívoco.
A zona de trabalho está a ser atualmente usada e não pode ser re-
2833 definida
A zona de trabalho está em processamento -- a definição não pode ser
Efeito
alterada.
Não pode haver consultas para esta zona de trabalho, antes de a defini-
Solução
ção da zona de trabalho ser alterada.
Systemmeldungen 05.03.01 pt 291 de 322
Mensagens de sistema
2834 Seleção de passo na função local não é permitida
Causa Houve um tentativa de seleção de passo em uma função local.
Efeito A seleção de passo não é efetuada.
Solução Chamar a função local no programa principal.
2835 Aceleração cartesiana máx. ultrapassada
A aceleração cartesiana máxima foi ultrapassada.
Causa ($ACC_CAR_STOP=TRUE) e $ACC_CAR_ACT ultrapassam
$ACC_CAR_LIMIT.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de forma correspondente, para permanecer dentro da
aceleração permitida.
Solução Alternativamente pode--se aumentar o valor para a aceleração
($ACC_CAR_LIMIT) ou desativar o supervisionamento da aceleração
($ACC_CAR_ACT=FALSE).
Fracassou informação de outros controladores de célula da alter-
2836 ação dos dados (<System variable name>).
Um problema interno de manuseio de mensagens impede que sejam
Causa enviados dados de alteração às outras unidades de comando dentro da
célula.
As outras unidades de comando dentro da célula não podem reagir de
Efeito
modo correspondente.
Solução Fazer um reboot da respectiva unidade de comando do robô.
2837 Sistema RoboCoaster. Download não permitido
No estado ROBOCOASTER foi feita uma tentativa de carregar dados da
Causa
máquina, apesar de estes já estarem disponíveis e completos.
2838 Parada de rampa provocada por <Machine name / IP address>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
292 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
PARADA DE EMERGÊNICA provocada por <Machine name / IP ad-
2839 dress>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2840 Modo manual interligado não pode ser iniciado
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Arranque remoto não admissível por <Machine name / IP address>
2841 (não é master)
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2842 Conexão ao robô <IP address> perdida
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Conflito de versões (<Message version number>) na mensagem de
2843 <IP address>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2844 Não é possível manter a sincronização de movimento
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 293 de 322
Mensagens de sistema
$FILTRO conflito: local=<Local machine $FILTER>; sistema interli-
2845 gado=<Remote machine $FILTER>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2846 $Eixo simulado : valor inválido
Causa Valor não permitido para “$Simulated_Axis”.
Efeito O valor não permitido foi rejeitado e o valor previsto é utilizado.
”$Simulated_Axis” é uma bitmask, baseada no número de eixos.
Solução O valor para”$Simulated_Axis” não pode ser negativo e deve ser igual ou
menor que 0x0FFF.
2847 ATRIBUIÇÃO BE NÃO PERMITIDA
Causa A instrução BE não foi utilizada corretamente em uma instrução $BASE.
Efeito Parada do interpretador e parada do robô.
Solução Correção da instrução $BASE=EB(...).
2848 MDR: nome de dispositivo não conhecido
Foi utilizado um nome de dispositivo que não consta na lista de dispositi-
Causa
vos.
Efeito Parada do interpretador e parada do robô.
Solução Utilização do nome correto.
2849 MDR: DISPOSITIVO NÃO DO TIPO <Tipo de dispositivo correto>
Causa O dispositivo não é do tipo correto.
Efeito Parada do interpretador e parada do robô.
Solução Utilização de um dispositivo do tipo correto.
294 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2850 MDR: ESTADO DO DISPOSITIVO NÃO ATIVO
Foi chamado um comando MDR / BE , sendo que o estado do dispositivo
Causa
não era ACTIVE.
Efeito Parada do interpretador e parada do robô.
Solução Definir o estado do dispositivo como ACTIVE.
2851 MDR: MOTION DRIVER BASE FOI MODIFICADA
Causa Um movimento relativo a uma base em movimento foi interrompido.
Efeito Parada do robô.
Solução Utilização de uma outra base.
MDR: PTP NÃO PERMITIDO SE A MOTION DRIVER BASE ESTIVER
2852 ATIVA
Foi programado um movimento PTP, enquanto a Motion Driver Base es-
Causa
tava ativa.
Efeito Parada do interpretador e parada do robô.
Solução Remover o movimento PTP.
2853 MDR: MUDANÇA DE ESTADO NÃO PERMITIDA
Causa A mudança de estado com “MD_SETSTATE()” não é permitida.
Efeito Parada do interpretador e parada do robô.
Permitido é:
Solução INITIALIZED <--> ACTIVE quano o estado INITIALIZED não é possível,
ocorreu uma falha prévia durante a inicialização.
Systemmeldungen 05.03.01 pt 295 de 322
Mensagens de sistema
2854 MDR: MOTION DRIVER DEVOLVE ERRO <Número do erro>
Causa A chamada do Motion Driver gerou uma mensagem de erro.
Efeito Parada do interpretador e parada do robô
2855 Módulo de freio individual <Número do eixo> nicht konfiguriert
O módulo de freio individual com o número de eixo especificado não está
Causa
configurado.
Efeito O freio é comandado por um outro canal ou nem é comandado.
Configurar o módulo de freio individual, ou alterar os dados da máquina
Solução
de forma correspondente.
2856 MDR: MUDAR FILTRO NÃO PERMITIDO
Causa Mudança do filtro enquanto MDR Base está ativa.
Efeito Parada do interpretador e parada do robô
Solução Nenhuma alteração do filtro enquanto MDR Base está ativa.
2857 Sistema restabelecido a partir do modo hibernate
Causa O sistema foi recuperado após uma falha da alimentação de energia.
Efeito Não aplicável.
Solução Não aplicável.
2858 Confirmação stop devido a erro de bus de campo
Causa Confirmação de uma parada devido a um erro de bus de campo.
Efeito Anula novamente Travar comandos e Acionamentos Deslig.
296 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Confirmação erro de comunicação com CAN--RDW <Número do
2859 eixo>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2860 Confirmação VIOLAÇÃO SAFETY FLAG
Diferentes estados de segurança na unidade manual de programação
Causa
(KCP) e no driver.
Efeito O KCP é reinicializado.
Solução Confirmar mensagem de erro.
2861 KCPDRV: ERRO WATCHDOG
Erro de CAN--Bus, sobrecarga de CAN--Bus e Timeout da mensagem
Causa
Alive.
Efeito O KCP é reinicializado.
Solução Confirmar mensagem.
2862 KCPDRV: Erro KCP controlador de mensagens durante a iniciação
Causa Não é possível inicializar o controlador CAN.
Efeito A comunicação com o CAN--Bus apresenta falhas.
Solução Confirmar a mensagem, verificar os cabos de conexão do KCP.
2863 KCPDRV: Código de erro <> não conhecido
Causa O driver KCP gerou uma mensagem de erro desconhecida.
Solução Favor contatar o serviço de supore técnico da empresa KUKA.
Systemmeldungen 05.03.01 pt 297 de 322
Mensagens de sistema
Instruções SYNCCMD são simuladas (<Unidades de comando
2864 simuladas>).
Foi ativada a simulação global dos comandos SYNCCMD para as unida-
des de comando especificadas. Por princípio, as unidades de comando
Causa
simuladas não são consideradas para os pontos de sincronização de
programa e movimentos sincronizados no tempo.
Os comandos SYNCCMD locais atuam sempre de tal modo, como se a
Efeito respectiva unidade de comando tivesse atingido o ponto de sicnroniza-
ção em primeiro lugar.
Solução Desativação no dialogo “Cell Map Simulation”.
Número máx. de solicitações da zona de trabalho entre duas
2865 instruções de movimento
Entre duas instruções de movimento estão contidas excessivas solicita-
Causa
ções da zona de trabalho.
Efeito O programa é interrompido.
Alterar o programa de forma correspondente. Reduzir a quantidade de
Solução
solicitações.
As solicitações da zona de trabalho não podem ser executadas por
2866 um trigger
Causa Foi emitida uma solicitação da zona de trabalho com Trigger.
Efeito A instrução não é executada.
Solução Alterar o programa de forma correspondente.
MDR: Movimento no interrupt não é possível se a base MDR estiver
2867 ativa
Foi executado um movimento no Interrupt enquanto a base MDR estava
Causa
ativa
Efeito O robô pára.
Solução Alterar o programa de forma correspondente.
298 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
PTP ponto de destino na singularidade <designação da
2868 singularidade>
O ponto de destino cartesiano de um movimento PTP está na singulari-
Causa dade. Por isso a respectiva posição de eixo não pode ser determinada
(normalmente é ajustada implicitamente em 0 grau).
Se o comutador STOP_AT_PTP_SINGULARITY estiver em TRUE, este
Efeito movimento não pode ser executado, exceto em T1 e MSTEP.
Em MSTEP é emitida apenas uma mensagem de aviso (sem reação).
Deslocar para o ponto com MSTEP em T1 e alterar a posição de destino
Solução
de tal modo, que esta não esteja mais na singularidade.
2869 Seleção de passo falhou, robô: <RemoteRoboter>
A seleção de passo na unidade de comando remota falhou. O programa
Causa foi selecionado errado ou não foi selecionado, ou os programas não são
idênticos.
Efeito A seleção de passo não é executada.
Solução Selecionar o programa correto.
2870 DSE -- boot concluído
Causa O processo de Boot do DSE foi concluído.
2871 Solicitação da zona de trabalho para ’<ws_name>’ falhou
A solicitação de zona de trabalho através do programa KRL falhou.
Causa Para isso pode haver diferentes causas (erro de conexão, zona de traba-
lho inexistente, etc.)
Efeito A execução do programa é parada.
Confirmar mensagem.
Solução
Pressionar a tecla de partida para iniciar uma nova solicitação.
2873 LTC: Inicialização falhou (motivo: <Motivo>)
Causa A tarefa LTC não foi inicializada corretamente.
Efeito A tarefa LTC não coleta nem envia dados para o cliente Windows.
Copiar o arquivo “LTC_Para.ini” para o diretório “\INIT”.
Solução Configurar o robô no mínimo com 6 eixos.
Ativar o modelo dinâmico.
Systemmeldungen 05.03.01 pt 299 de 322
Mensagens de sistema
2874 Falta número skip <Número skip em falta>
Causa O interpretador segue para um caractere Endskip não definido.
Efeito Indicação do erro de programa.
Solução Corrigir o programa de modo correspondente.
2875 Falta número endskip no fim<Número skip em falta>
Um endereço de salto não termina com o número Endskip correspon-
Causa
dente no final do programa.
Efeito Indicação do erro de programa.
Solução Corrigir o programa de modo correspondente.
MDR: ORI_TYPE JOINT NÃO PERMITIDO SE MDR BASE ESTIVER
2876 ATIVA
Ori_Type JOINT está programado e uma MDR Base ($BASE=EB(...))
Causa
está ativa. Isto não é permitido.
Efeito O robô é parado.
Solução Utilizar outros Ori_Type.
2877 Skip statements interligados não são permitidos
Causa Existem Skip Statements interligados no programa.
Alterar o programa de forma correspondente. Para isso consultar a docu-
Solução
mentação.
2878 Skip n.º ’<Número skip>’ já está a ser usado
Causa Ese número Skip já está sendo utilizado.
Solução Utilização de um outro número.
300 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2879 <Formato de ficheiro>: Registo <Recordname> não existe
Causa O registro não existe ou não foi encontrado.
Efeito O comando não é executado.
Solução Criar ou carregar um registro.
2880 <Formato de ficheiro>: Registo <Recordname> já está a ser usado
Causa O registro está sendo utilizado neste instante em um outro comando.
Efeito O comando não é executado.
Solução Aguardar a conclusão do outro comando.
2881 <Formato de ficheiro>: Configuração inválida para <Recordname>
Formato do arquivo de configuração não permitido.
Causa
Excesso de variáveis configuradas para o registro.
Efeito O registro não pode iniciado.
Verificar a configuração.
Solução
Reduzir o número de variáveis para o registro.
2882 <Formato de ficheiro>: não há memória livre para <Recordname>
Causa Excesso de registros na memória RAM.
Efeito O comando não é executado.
Solução Remover alguns registros.
<Formato de ficheiro>: Arquivo <Nome do ficheiro> não pode ser
2883 aberto
Processo de leitura: Arquivo inexistente.
Causa Processo de escrita: Arquivo ou mídia de gravação protegidos contra
gravação ou falta de espaço na memória.
Efeito O comando não é executado.
Processo de leitura: Criar o arquivo.
Solução Processo de escrita: Remover a proteção contra gravação ou aumentar
o espaço de memória apagando arquivos desnecessários.
Systemmeldungen 05.03.01 pt 301 de 322
Mensagens de sistema
2884 <Formato de ficheiro>: Registo <Recordname> existe
Causa Já existe um registro com este nome.
Efeito O comando não é executado.
Solução Apagar o arquivo existente.
2885 <Formato de ficheiro>: Formato de arquivo <Recordname> inválido
Causa O formato de arquivo é inválido.
Efeito O comando não é executado.
Solução Corrigir o formato de arquivo de modo correspondente.
2886 <Formato de ficheiro>: Instrução desconhecida
O String da instrução não está correto.
Causa
O comando não é conhecido.
Efeito O robô é parado.
Solução Utilizar a sintaxe de instrução correta.
<Formato de ficheiro>: Tarefa para <Recordname> não pode ser
2887 iniciada
Causa Há um excesso de instruções EMS ativas em diferentes tarefas.
Efeito O comando não é executado.
Solução Aguardar a conclusão de um outro comando.
2888 <Formato de ficheiro>: Número máx. de registos simultâneos
Dependendo do driver, o número de registros simultâneos pode ser res-
Causa
trito, sendo que é possível apenas um registro por vez.
Efeito O registro não é iniciado.
Solução Aguardar a conclusão de um outro registro.
302 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
<Formato de ficheiro>: Mudança de <Variável> não permitida
2889 durante o registo de <Recordname>
Dependendo do driver EMS, durante um registro não é permitida a alte-
Causa
ração de variáveis do sistema ($tool, $base, $ipo_mode e outras).
Efeito O registro é parado.
Solução Não alterar variáveis de sistema durante um registro.
2890 <Formato de ficheiro>: Erro desconhecido
Causa Ocorreu um erro desconhecido no driver EMI.
Efeito O robô é parado.
Solução Entrar em contato com o fabricante do driver.
<Formato de ficheiro>: Erro durante a iniciação do registo
2891 <Recordname>
Causa Ocorreu um erro durane a inicialização do registro.
Efeito O registro não é iniciado.
Solução Entrar em contato com o serviço de assistência da firma KUKA.
2892 <Formato de ficheiro>: Erro durante o registo de <Recordname>
Causa Durante o registro ocorreu um erro específico do driver.
Efeito O registro é parado.
Solução Entrar em contato com o serviço de assistência KUKA.
<Formato de ficheiro>: Erro durante a restauração de variáveis para
2893 o registo <Recordname>
Causa Erro no sistema E/S.
Efeito O robô é parado.
Solução Verificar o sistema E/S.
Systemmeldungen 05.03.01 pt 303 de 322
Mensagens de sistema
<Formato de ficheiro>: Posição atual e posição de início
2894 <Recordname> não são idênticas
Causa O robô se encontra em uma posição errada.
Efeito O robô é parado.
Solução Deslocar o robô até a posição de partida para o registro.
<Formato de ficheiro>: Variável <Variável> e valor em <Recordname>
2895 são diferentes
Valor incorreto para uma variável de sistema, tipicamente $tool, $base,
Causa
$ipo_mode ...
Efeito O robô é parado.
Solução Definir um valor correto para a variável de sistema.
<Formato de ficheiro>: Erro durante a execução do movimento
2896 <Recordname>
Causa Durante a execução do movimento ocorreu um erro específico do driver.
Efeito O registro é parado.
Solução Entrar em contato com o serviço de assistência KUKA.
<Formato de ficheiro>: Tempo de registo máx. para <Recordname>
2897 ultrapassado
Causa Falta um comando Stop ou duração muito longa do movimento.
Efeito Registro imprestável.
Chamada do comando Stop antes de atingir a duração máxima possível
Solução
do registro.
2898 <Formato de ficheiro>: Registo <Recordname> é removido
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
304 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Início bloqueado (unidade de comando: <Unidade de comando>,
2899 motivo: <Motivo>)
Robôs cooperantes:
Causa A partida está bloqueada, porque um dos robôs integrados no conjunto
não cumnpre uma pré--condição (Mais detalhes ver parâmetro Causa).
A partida não é executada até que que o estado defeituoso no respectivo
Efeito
robô seja eliminado.
Solução Eliminar a causa da partida bloqueada na respectiva unidade de comando.
2900 Não há mais memória virtual
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2901 Não há mais memória física
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2902 <Nome de objeto> foi aumentado. Módulo está pronto
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2903 <Nome de objeto> atingiu o limite máx. Necessário cancelar
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
<Nome de objeto> não pode ser aumentado. Já não há memória
2904 virtual
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 305 de 322
Mensagens de sistema
2905 Não foi encontrado endspline apropriado
Causa KS incompleto. Spline sem Endspline.
<Formato de ficheiro>: Erro durante o carregamento de
2906 <Recordname>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
<Formato de ficheiro>: Erro durante o salvamento de
2907 <Recordname>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
<Formato de ficheiro>: Erro durante o início do movimento
2908 <Recordname>
A posição de partida não está correta.
Causa
Não é possível escrever a variável inicial.
Efeito O movimento não é executado.
Verificar o arquivo de registro.
Solução
Verificar o sistema E/S.
<Formato de ficheiro>: Instrução não é possível para
2909 <Recordname>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
MDR: Movimento SAK não é permitido se a base MDR estiver
2910 inválida
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
306 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2911 MDR: Base MDR em movimento não é permitida
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2912 Iminente colisão com robô <Nome do robô>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Sistema de controle de colisões: ferramenta desconhecida <Nome
2913 da ferramenta>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Sistema de controle de colisões: destino desconhecido <Nome do
2914 local de destino>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Sistema de controle de colisões conflito de versões com robô
2915 <Nome do robô>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Cooperação de programa conflito de versões (<Message version
2916 number>) na mensagem de <IP address>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
Systemmeldungen 05.03.01 pt 307 de 322
Mensagens de sistema
2917 Não é possível nova atribuição base LK() em interrupt
Em um programa de Interrupt não é permitido executar uma atribuição
Base com “LK()”, quando a respectiva máquina independente especifi-
Causa
cada no parâmetro IP de “LK()”, já não está atribuída como Base através
de “LK()” no movimento interrompido pelo Interrupt.
Efeito O programa é interrompido.
Alterar de modo correspondente o programa de Interrupt (remover as
Solução
atribuições de Base).
2918 Interpretação para trás para robôs cooperantes não é possível
A variável $SpreadAction possui um valor >1, e o Trace Buffer está vazio
Causa
para mover para trás.
Um movimento para trás em modo Scan não é possível para uma partida
Efeito
configurada em conjunto integrado.
Solução Definir a variável $SpeadAction=0.
Temporizador local não sincronizado durante a cooperação de
2921 movimento
O temporizador local deve estar sincronizado com o temporizador remoto
Causa
durante uma cooperação de movimento conjunto.
Efeito A execução do programa é parada.
Certificar--se que a sincronização dos temporizadores foi instalado e está
Solução
funcionando corretamente.
2922 Temporizador em <Name or IP of remote machine> não sincronizado.
O temporizador local deve estar sincronizado com o temporizador remoto
Causa
durante uma cooperação de movimento conjunto.
Efeito A execução do programa é parada.
Certificar--se que a sincronização dos temporizadores foi instalado e está
Solução
funcionando corretamente.
308 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2923 Instrução no spline block não permitida
Causa Instrução não permitida dentro de um bloco Spline...Endspline.
Efeito Sintaxe incorreta no programa.
2924 Opção Tool/Base da instrução não está correta
A opção Tool / Base da instrução lin_rel não foi programada correta-
Causa
mente.
Efeito A sintaxe do programa não está correta.
Confirmar curto--circuito circuito intermédio <Número do módulo
2925 de potência>
Causa O KPS precisa fornecer uma corrente muito elevada.
Efeito O KPS é desligado para autoproteção.
Confirmar corrente de pico <Número do módulo de potência>
2926 muito elevada
Causa O KPS precisa fornecer uma corrente de pico muito elevada.
Efeito O KPS é desligado para autoproteção.
Solução Reprogramar a trajetória do robô. Deslocamento mais lento.
Confirmar corrente efetiva <Número do módulo de potência> dema-
2927 siado elevada
Causa O KPS precisa fornecer uma corrente efetiva muito elevada.
Efeito O KPS é desligado para autoproteção.
Solução Reprogramar a trajetória do robô. Deslocamento mais lento.
Confirmar falha de uma fase de rede <Número do módulo de
2928 potência>
Causa Uma fase da rede trifásica está com defeito.
Efeito O KPS não consegue fornecer a potência requerida.
Solução Verificação se há mau contato. Verificação se há cabo quebrado.
Systemmeldungen 05.03.01 pt 309 de 322
Mensagens de sistema
Confirmar defeito de ventilador. Substituir módulo <Número do
2929 eixo> para evitar parada.
O ventilador no conversor de uma unidade de comando Cobra está com
Causa
defeito.
Efeito O resfriamento do conversor não é mais suficiente.
Solução Verificação se o ventilador gira livremente. Substituição do ventilador.
2930 Não é possível estabelecer a ligação à máquina local
Causa O programa local solicitou uma ligação à unidade de comando local.
Efeito A execução do programa é parada.
Alterar o programa de modo correspondente, para que não seja requisita
Solução
uma ligação à unidade de comando local.
Cooperação de programa não instalada. Não é possível executar a
2931 instrução.
Uma instrução para a cooperação de programas não pode ser execu-
Causa tada, porque o programa Cooperating Robots não está instalado ou não
está configurado corretamente.
Efeito A instrução não é executada.
Instalar ou configurar o programa Cooperating Robots, ou remover do
Solução
programa KRL as instruções relativas à cooperação de programas.
Uma ou várias unidades de controle são simuladas em modo au-
2932 tomático.
Foi ativada a simulação global dos comandos SYNCCMD para uma ou
Causa várias unidades de comando. O modo de operação foi comutado de
T1/T2 para AUT/EXT.
Os comandos SYNCCMD locais atuam sempre de tal modo, como se a
Efeito respectiva unidade de comando tivesse atingido o ponto de sicnroniza-
ção em primeiro lugar.
Solução Desativação no dialogo “Cell Map Simulation”.
Confirmar desvio posição absoluta DSE -- RDW eixo <Número do
2933 eixo>
Mensagem subseqüente à mensagem de estado “Desvio posição abso-
Causa
luta DSE -- RDW eixo %1”.
Solução Confirmar mensagem.
310 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Não pode ligar a <Master name or IP address> sem uma KCP
2934 comum
São permitidas ligações apenas entre unidades de comando que utilizam
Causa
um KCP comum.
Efeito A execução do programa é parada.
Configurar o KCP comum de tal modo, que tanto a máquina indepen-
Solução
dente como a máquina dependente utilizem o mesmo KCP comum.
Sem KCP comum as ações não podem ser ligadas a <Controller
2935 name or IP address>
Houve uma tentativa de interligar ações com outras unidades de co-
Causa
mando, que não são comandadas pelo mesmo KCP comum utilizado.
Efeito A execução não é possível.
Configurar as duas unidades de comando de tal forma que ambas utili-
Solução
zem o mesmo KCP comum.
2936 $CP_STATMON: ângulo de eixo errado
Causa Um ângulo de eixo atingido é diferente do ângulo de eixo programado.
Após a seleção de passo dentro de uma série de pontos CP pode ocor-
rer que um ângulo de eixo diferente daquele programado tenha como
conseqüência uma inversão completa do manípulo do robô (risco de da-
nificação de cabos de alimentação instalados).
Efeito
Da mesma forma, no passo seguine pode ser atingido o interruptor de
fim de curso do software. Em um passo PTP a seguir existe o perigo de
que a trajetória de deslocamento seja totalmente alterada em relação à
trajetória original.
Reprogramar este ponto de parada exata.
Solução
Eventualmente repetir o movimento SAK com outros ângulos de eixo.
2937 $$CP_STATMON: aproximação não é possível
Devido ao ajuste do supervisionamento de configuração CP, o programa
Causa detectou que um ou mais ângulos de eixo programados não coincidem-
com os atuais ângulos de eixo.
O programa não pode efetuar uma aproximação neste ponto e deslo-
Efeito
ca--se para o ponto de parada exata.
Solução Se for o caso, programar novamente o ponto de parada exata.
Systemmeldungen 05.03.01 pt 311 de 322
Mensagens de sistema
2938 Foi encontrada lista sinc. Inconsistente
A lista de unidades de comando que participam da sincronização não é
Causa
consistente entre as unidades de comando.
Efeito A execução do programa é parada.
Assegurar que a lista de unidades de comando que participam da sincro-
Solução
nização seja igual em todas as unidades de comando.
Master LK (<Master Name oder IP--Adresse>) falta na lista de
2939 sincronização
Foi programado um movimento sincronizado no tempo, no qual o LK()
Causa
Master não participa.
Efeito Parada na trajetória.
Solução Programar LK() Master sincronizado no tempo.
2940 Número máximo de flags cíclicos ativados em simultâneo. Máx. 32
Causa O número de Zykflags 32 ativadas foi ultrapassado.
No processamento de comando:
O comando não é processado.
Efeito No processamento de programa:
Frenagem sobre a rampa.
Travamento de todos os comandos ativos.
2941 IBGN fim ’<Número IBGN> falta
Causa Foi programado um início “IBGN”sem o respectivo fim “IBGN”.
Efeito A execução não é possível.
Solução Alterar o programa de forma correspondente.
2942 IBGN não podem estar interligados
Causa As instruções “IBGN” foram programadas de modo interligado.
Efeito A execução não é possível.
Solução Alterar o programa de forma correspondente.
312 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2944 IBGN ’<Número IBGN>’ já está a ser usado
Causa Dupla utilização de um número IBGN.
Efeito A execução não é possível.
Solução Alterar o programa de forma correspondente.
Ultrapassagem do tempo para a desativação da regulação da força
2945 <Número de eixo>
A regulagem de força dentro da DSE não desliga dentro do tempo prede-
Causa finido.
Uma possível causa pode ser a falta de um sinal de sensor.
Efeito Stop do gerador.
Solução Verificar o hardware (DSE, RDW e sensor de força).
Confirmar defeito do cabo de codificador ext. posinput <Número do
2946 eixo>
Mensagem subseqüente à mensagem de estado “Defeito do cabo do
Causa codificador ext. posinput”.
Cíclico.
Parada sobre a trajetória.
Efeito Saída $ALARM_STOP sinal 0.
Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
2947 MDR: IPO_MODE TCP não permitido
Causa IPO_MODE TCP foi ajustado com “MDR--Base” ativa.
Efeito O robô pára.
Solução Não ajustar IPO_MODE TCP com “MDR--Base” ativa.
Systemmeldungen 05.03.01 pt 313 de 322
Mensagens de sistema
Confirmar amplitude de regulação regulador de força <Número do
2948 eixo> n.º <Tipo do erro>
Esta é a mensagem subseqüente à mensagem: “Amplitude de regulação
regulador de força”.
O sinal do sensor de força não é adequado para o movimento.
Tipo de erro Nº 1: A força real se altera e a posição permanece con-
stante.
Causa Tipo de erro Nº 2: A posição se altera e a força real permanece con-
stante.
Tipo de erro Nº 3: A pinça abre mais do que a posição correspondente a
FORCE_LIM.
Estes supervisionamentos são ativos apenas durante a regulagem de
força!
Frenagem dinâmica.
Efeito Comandos ativos travados.
Saída “ALARM_STOP” apresenta nível de sinal 0.
Confirmar mensagem.
Verificar o sensor de força.
Verificar o cabo do sensor de força.
Solução
Verificar o cartão de inserção RDW.
Nota:
Supervisionamentos são ativos apenas durante a regulagem de força.
Movimento sincronizado no tempo requer o mesmo tipo de
2949 execução do programa
Pelo menos duas das unidades de comando estão comutadas em dife-
Causa
rentes tipos de execução do programa.
O movimento de parada na trajetória é rejeitado pelo interpretador e
Efeito
após a confirmação da mensagem o movimentopassa a ser assíncrono.
Comutar todas as unidades de comando para o mesmo tipo de execução
Solução do programa e, se for ocaso, executar a seleção de passo para o passo
de movimento anterior.
Sincronização ID dupla ativa (<ID da seqüência de caracteres da
2950 Sync>).
O programa KRL emitiu uma instrução de sincronização de programa ou
de movimento com a mesma identificação de uma outra sincronização
de programa ou de movimento.
Causa
Isso pode acontecer, p. ex., em”NOWAIT”, “SYNCS”... ou enquanto o
robô aguarda uma instrução de sincronização e chega outra instrução de
sincronização com a mesma identificação.
Efeito A instrução não é executada.
Atribuir uma identificação inequívoca a cada instrução de movimento ou
Solução
de sincronização.
314 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
Confirmar falta liberação de acionamento <Número do módulo de
2951 potência>
Foi dada a liberação de acionamento ao KPSi de uma unidade de co-
Causa
mando Cobra.
Efeito Nenhum.
Solução Confirmar mensagem.
2952 Confirmar perda de ligação durante uma cooperação de movimento
Causa A conexão à uma unidade de comando remota foi interrompida.
Solução Confirmar mensagem.
2953 Confirmar perda da sincronização do temporizador
A conexão à outra unidade de comando foi interrompida.
Causa O temporizador não estava sincronizado durante a cooperação de movi-
mentos.
Solução Confirmar mensagem.
2954 Operação não é válida, já existe um temporizador “Master”
Houve uma tentativa de configurar esta unidade de comando como um
Causa temporizador Master. O processo falhou porque já existe um temporiza-
dor Master na célula.
A unidade de comando permanece configurada como temporizador
Efeito
Slave.
Caso se queira configurar esta unidade de comando como temporizador
Solução Master, então o Master existente deve ser definido como temporizador
Slave.
2955 Sincronização do temporizador não foi inicializada
Houve uma tentativa de modificar o estado da sincronização do tempori-
Causa
zador, antes de inicializar este módulo.
A alteração pretendida do estado da sincronização do temporizador não
Efeito
pode ser executada.
Certificar--se de que a sincronização de temporizador foi instalada como
componetne ativo do pacote Tech.
Solução Caso contrário a sincronização de temporizador não é inicializada.
Se ela foi instalada corretamente, reinicialize a unidade de comando,
para tentar uma nova inicialização.
Systemmeldungen 05.03.01 pt 315 de 322
Mensagens de sistema
2956 Canal de frenagem não aberto <Número do eixo>
O freio não foi aberto, visto que nem todos os eixos estão sendo regula-
Causa
dos neste canal de frenagem.
Mensagens de erro, por exemplo:
Efeito
Valor de ajuste ou motor bloqueado.
Comandar todos os eixos juntos em um canal de frenagem único ou.
Solução
utilizar unidade de comando de frenagem individual.
2957 Nenhum deadlock detectado
A unidade de comando que foi ativada em uma busca de Deadlock, não
Causa
espera por uma área de trabalho.
Conflito de versões (<Message version number>) workspace sha-
2958 ring na mensagem de <Controller name or IP Address>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
2959 Hardware não apoia monitorização de falha de fase da rede
No arquivo “$OPTION.DAT” está previsto o supervisionamento de falha
de fase da rede por “$PHASE_MONITORING=TRUE”, apesar de estar
Causa
disponível apenas a versão de software KPS abaixo de 11 ou não há
“DSE--IBS--C33” disponível.
Efeito O supervisionamento de falha de fase da rede não está ativo.
No arquivo “$OPTION.DAT” ajustar o supervisionamento de falha de
fase da rede em “$PHASE_MONITORING=FALSE” ou estabelecer as
Solução
pré--condições de hardware necessárias (KPS software versão 11 ou
acima, bem como “DSE--IBS--C33”).
2960 Dados de ajuste atuais foram salvos.
Causa O usuário salvou os atuais dados de ajuste .
Mesmo em caso de uma queda imediata da tensão (sem buffering) o
Efeito
robô não perde o seu ajuste, desde que ele não seja mais movimentado.
316 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
2961 Dados de ajuste atuais NÃO foram salvos.
O salvamento dos dados de ajuste atuais falhou, porque o robô não es-
Causa tava na imobilidade absoluta (é necessária a queda de todos os freios)
ou a interface de comunicação com a DSE estava ocupada.
Efeito Os dados de ajuste atuais não foram salvos.
Parar o robô, aguardar a queda dos freios, e salvar novamente os atuais
Solução
dados de ajuste.
2962 Confirmar erro geral KSD <Número do eixo>
Mensagem subseqüente à mensagem de estado”Erro de acionamento
<Número do eixo> Nº <...>”.
O KSD do respectivo eixo indica um estado de erro geral. Informações
precisas sobre este estado de erro do KSD são fornecidas pelas mensa-
gens subseqüentes.
Se a mensagem é gerada sem mensagens subseqüentes, isto significa
que o erro no KSD esteve presente por tão pouco tempo, que a DSE não
Causa pôde ler o número do erro no KSD, antes de o erro desaparecer nova-
mente. Neste caso é necessário realizar a leitura da memória de erros no
respectivo KSD. Para isso é preciso abrir a ferramenta DSERDW e ex-
portar os locais de código do respectivo KSD para um arquivo de proto-
colo.
Informações mais detalhadas sobre o histórico de erros são fornecidas
pelos locais de código 162, 163 e 164, o local de código 161 contém o
erro atual.
Parada sobre a trajetória.
Efeito
Travamento de todos os comandos ativos.
Confirmar mensagem.
Solução
Informar o serviço de assistência técnica KUKA.
Interrupt com prioridade <Prioridade atual> já ativo e definido em
2963 <Nome do ficheiro SRC> linha <Número da linha>
Uma declaração de Interrupt tenta sobrescrever um Interrupt que está
ativo no momento.
A consequência seria que o Interrupt ativo é apagado.
Causa
O novo Interrupt declarado foi definido, porém não pode se tornar efetivo
devido à mesma prioridade do Interrupt que está ativo no momento.
Ao sair do subprograma atual, o novo Interrupt definido é apagado.
O programa do robô é parado.
Efeito
Travamento de todos os comandos ativos.
Alterar o programa de modo correspondente, p. ex., definir outra priori-
Solução dade para o novo Interrupt.
Confirmar mensagem.
Systemmeldungen 05.03.01 pt 317 de 322
Mensagens de sistema
STOP devido à falha de uma fase de rede DSE <Número DSE> KPS
2964 <Número do KPS>
Falta uma fase da alimentação de tensão do KPS. Isso pode ser o caso
Causa já antes da conexão ao armário.
Também pode faltar a respectiva ligação no armário.
O robô é parado. O ventilador externo do armário é desligado, caso isso
Efeito
seja possível via hardware
Assegurar a alimentação de tensão de todas as três fases. Verificar a
Solução ligação necessária no armário: X110/pino2 deve estar ligado em 24V e
X110/pino3 deve estar ligado no aterramento.
Parâmetros servo KPS <Número do KPS> linha <Número da linha>
2965 não corretos.
O parâmetro servo KPS especificado para o respectivo KPS não está
Causa
correto.
Efeito O parâmetro servo KPS especificado para o respectivo KPS é ignorado.
Corrigir o arquivo servo especificado em R1\MADA\$MACHINE.DAT para
Solução o respectivo KPS, ou especificar em R1\MADA\$MACHINE.DAT um ar-
quivo servo KPS válido.
2966 Confirmar KCP erro de conexão
Mensagem subseqüente à mensagem de “KCP: erro de conexão”. Esta
Causa mensagem aparece quando é restabelecida a conexão à rede para o
KCP. Ver também mensagem n.º 328.
Efeito Travamento de todos os comandos ativos.
Solução Confirmar mensagem.
2967 Confirmar força máxima ultrapassada <Eixo>
Após a ativação da regulagem de força ($Force[Eixo] > FORCE_LIM), o
Causa sinal do sensor de força é maior que FORCE_MAX + UPPER_LI-
MIT_TOL.
Frenagem dinâmica.
Efeito
Comandos ativos travados.
Verificar o valor do sensor de força $Force_act[Achse] em Varkor.
Verificar o sensor de força e o cabo.
Solução Verificar o registro Trace do grupo de teste 11 “Regulagem de força”,
para verificar se o regulador não está com sobreoscilação demasiado
forte.
318 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
4300 COMPILAR <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser analisado
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4301 COPIAR <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser copiado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4302 Sobrescrever <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser sobrescrito.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4303 APAGAR <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser apagado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4304 LINK <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser interligado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
Systemmeldungen 05.03.01 pt 319 de 322
Mensagens de sistema
4305 SEPARAR <Nome do objeto> (S/N)?
Causa Consulta se o objeto deve ser separado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4307 APAGAR O PROCEDIMENTO COMPLETO ?
O eixo não estava ajustado no instante do comando “Deslocamento de
Causa recepção”.
Consulta se o procedimento deve ser apagado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4308 APAGAR A INICIALIZACAO?
Causa Consulta se a inicialização deve ser apagada.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4309 Sobrescrever programa <Nome do programa> (S/N)?
Causa Consulta se o objeto deve ser sobrescrito.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4310 <Nome do objeto> selecionado. Sobrescrever (Sim/Não)?
Causa Consulta de segurança, se o objeto selecionado deve ser sobrescrito.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
320 de 322 Systemmeldungen 05.03.01 pt
1 Mensagens de sistema (continuação)
4311 APAGAR PROGRAMA <Nome do objeto> (S/N)?
Causa Consulta de segurança, se o objeto selecionado deve ser apagado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4312 APAGAR SELECCAO <Nome do objeto> (S/N)?
Causa Consulta de segurança, se o objeto selecionado deve ser apagado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4314 O diretório <nome do objeto> não existe! Criar (Sim/Não)?
Causa Consulta de segurança, se o novo diretório de destino deve ser criado.
Efeito Disponível para processamento.
Solução Responder à pergunta de modo correspondente.
4315 <Nome do programa> ACTIVO: PARAR PROCESSO (S/N) ?
Causa Recarregar os dados da máquina.
Efeito Disponível para processamento.
Parar o processo e reinicializar o programa depois de carregar os dados
Solução
da máquina.
6000 <String ASCII><String ASCII><String ASCII>
Sobre este tema ainda não há ajuda online disponível.
Solução
Informações podem ser encontradas nos manuais de operação.
6500 FALHA INTERNA (DADOS DA MENSAGEM NÃO DEFINIDOS)
Causa Os dados da mensagem não foram definidos corretamente.
Systemmeldungen 05.03.01 pt 321 de 322
Mensagens de sistema
6501 <Nome da instrução> <Ação>
Execução do comando OBJH concluída.
Causa
Execução do comando.
Efeito Nenhum.
6502 Erro ao ler o ficheiro INI <Nome do ficheiro> <Erro interno>
Arquivo INI defeituoso.
Causa
Na partida do sistema.
Efeito Travamento de todos os comandos.
Solução Corrigir o arquivo INI de modo correspondente.
6503 ERRO DE CONFIGURACÃO DO CARREGADOR E/S <Nome do driver>
Erro ao ler o arquivo INI
Causa
Na inicialização do sistema.
Solução Verificar io_int.ini.
6504 QUEBRA TENSÃO <Número do eixo>
A tensão de operação interna (+15V) no servo estágio final é supervisio-
nada. Se o servo estágio final não está pronto, eventualmente a tensão
Causa do circuito intermediário está muito baixa.
Cíclico.
Efeito Frenagem sobre a rampa. Parada do processamento do programa.
Eliminar o erro.
Solução Resetar através da tecla de confirmação do hardware “ACK” no módulo
DSE I.
6505 CAN controler <Número> com defeito
Causa O controlador CAN está com defeito.
Efeito O sistema de bus CAN não funciona.
Solução Verificar o controlador.
1de modo correspondente
322 de 322 Systemmeldungen 05.03.01 pt


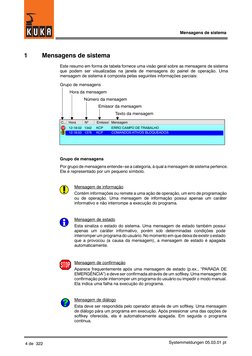




Você também pode gostar
- Apostila - Programação de Robôs MOTOMAN 21 PDF100% (1)Apostila - Programação de Robôs MOTOMAN 21 PDF183 páginas
- Apostila Treinamento Operacional - Programação Básica Ao Avançado - Kuka Krc4100% (1)Apostila Treinamento Operacional - Programação Básica Ao Avançado - Kuka Krc486 páginas
- Treinamento Programação Perito TP-05Ainda não há avaliaçõesTreinamento Programação Perito TP-05119 páginas
- KR c2 2005 - Instruções de ServiçoAinda não há avaliaçõesKR c2 2005 - Instruções de Serviço215 páginas
- Manual Controlador IRC5 - PortuguêsAinda não há avaliaçõesManual Controlador IRC5 - Português360 páginas
- Robo Kawasaki - Manual I - O Externos Serie DAinda não há avaliaçõesRobo Kawasaki - Manual I - O Externos Serie D88 páginas
- IRC5 Advanced Programming Students Manual Rev2-PortuguesAinda não há avaliaçõesIRC5 Advanced Programming Students Manual Rev2-Portugues86 páginas
- Manual de Programação Intermediária DX-100Ainda não há avaliaçõesManual de Programação Intermediária DX-10070 páginas
- Instalando Ethercat Workvisual PDFAinda não há avaliaçõesInstalando Ethercat Workvisual PDF17 páginas
- Robo Kawasaki - Manual Operacional D Serie100% (9)Robo Kawasaki - Manual Operacional D Serie429 páginas
- Computadores Industriais e Terminais PanelViewAinda não há avaliaçõesComputadores Industriais e Terminais PanelView68 páginas
- Códigos de Redefinição de Todos Os TelefonesAinda não há avaliaçõesCódigos de Redefinição de Todos Os Telefones8 páginas
- Fundamentos de Redes de Computadores: Unicesumar100% (1)Fundamentos de Redes de Computadores: Unicesumar217 páginas
- Codbar Lista de Precios Distribuidores Nov2023Ainda não há avaliaçõesCodbar Lista de Precios Distribuidores Nov20235 páginas
- (A3) Avaliação Do Módulo 3 - Sistemas Operacionais - Revisão Da TentativaAinda não há avaliações(A3) Avaliação Do Módulo 3 - Sistemas Operacionais - Revisão Da Tentativa5 páginas
- Tabela Telecélula Erros Panic Full - Julho 2020100% (8)Tabela Telecélula Erros Panic Full - Julho 20203 páginas
- Fabricação e Programação de Uma Rebobinadora SemiautomáticaAinda não há avaliaçõesFabricação e Programação de Uma Rebobinadora Semiautomática25 páginas
- Flip-Flops: Guia Completo para Circuitos DigitaisAinda não há avaliaçõesFlip-Flops: Guia Completo para Circuitos Digitais30 páginas
- Avaliação de Arquitetura de Sistemas DigitaisAinda não há avaliaçõesAvaliação de Arquitetura de Sistemas Digitais4 páginas
- Provas Analista de Sistemas - Infraestrutura PETROBRAS CESGRANRIO 2008Ainda não há avaliaçõesProvas Analista de Sistemas - Infraestrutura PETROBRAS CESGRANRIO 200817 páginas
- Automatize Tarefas Maçantes Com Python PDFAinda não há avaliaçõesAutomatize Tarefas Maçantes Com Python PDF355 páginas
- Estrutura e Funções de MicroprocessadoresAinda não há avaliaçõesEstrutura e Funções de Microprocessadores3 páginas
- Configuração de Proxy e Controle de Banda LinuxAinda não há avaliaçõesConfiguração de Proxy e Controle de Banda Linux16 páginas
- Atividade Pratica 2024 - Engenharia de SoftwareAinda não há avaliaçõesAtividade Pratica 2024 - Engenharia de Software6 páginas
- Manual de Instruções: DL 2970W DL 3270W DL 3970F LE3274W LE3974FAinda não há avaliaçõesManual de Instruções: DL 2970W DL 3270W DL 3970F LE3274W LE3974F40 páginas