Você também pode gostar
- Simulador de curvas I-V de células e módulos fotovoltaicosDocumento39 páginasSimulador de curvas I-V de células e módulos fotovoltaicosel_leonazulAinda não há avaliações
- Aula 4 - Conversor BoostDocumento24 páginasAula 4 - Conversor BoostBianca FariasAinda não há avaliações
- 7-Projeto de Reatores Não IsotérmicosDocumento85 páginas7-Projeto de Reatores Não IsotérmicosDan Dan100% (3)
- Equações DiferenciaisDocumento2 páginasEquações DiferenciaisJefersonCorreiaAinda não há avaliações
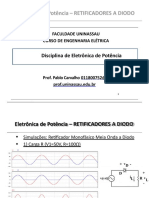
- Retificador Monofásico Meia Onda SimulaçõesDocumento26 páginasRetificador Monofásico Meia Onda SimulaçõesPablo CarvalhoAinda não há avaliações
- Fontes ReguladasDocumento18 páginasFontes ReguladasArmando Célio LealAinda não há avaliações
- Circuitos Chaveados BásicosDocumento14 páginasCircuitos Chaveados BásicosscobaAinda não há avaliações
- Conversores CA/CC: Retificação e Circuitos em Corrente AlternadaDocumento86 páginasConversores CA/CC: Retificação e Circuitos em Corrente AlternadaDaniel CostaAinda não há avaliações
- Retificadores de 1⁄2 Onda MonofásicosDocumento17 páginasRetificadores de 1⁄2 Onda MonofásicosCarlos HenriqueAinda não há avaliações
- CEL099 - 003 Aplicações de Diodos PDFDocumento32 páginasCEL099 - 003 Aplicações de Diodos PDFMatheusAinda não há avaliações
- Circuitos com diodos e interruptoresDocumento25 páginasCircuitos com diodos e interruptoresENRIQUEAinda não há avaliações
- Aula 5 - Retificadores ControladosDocumento25 páginasAula 5 - Retificadores ControladosAbel HenriqueAinda não há avaliações
- Retificador monofásico meia onda a diodo: análise das formas de onda e cálculo das grandezas elétricasDocumento23 páginasRetificador monofásico meia onda a diodo: análise das formas de onda e cálculo das grandezas elétricasPablo CarvalhoAinda não há avaliações
- Aula 2 - Funções de Excitação - Katia PDFDocumento49 páginasAula 2 - Funções de Excitação - Katia PDFMarcos Antonio Arantes de FreitasAinda não há avaliações
- Amplificadores Operacionais (Modo de Compatibilidade)Documento39 páginasAmplificadores Operacionais (Modo de Compatibilidade)Patrícia AbreuAinda não há avaliações
- Lista 3 Potencia EletronicaDocumento2 páginasLista 3 Potencia EletronicaGuilherme Takao HaraAinda não há avaliações
- Aula 04 - Circuito Comparador de TensãoDocumento17 páginasAula 04 - Circuito Comparador de TensãovivaldomendesAinda não há avaliações
- EL8210 NEA210 - Teoria v2.3Documento52 páginasEL8210 NEA210 - Teoria v2.3Felipe OhquiAinda não há avaliações
- UFCD6016 - Amplificadores OperacionaisDocumento63 páginasUFCD6016 - Amplificadores Operacionaisjoao xavierAinda não há avaliações
- Filtro de saída MLP com indutores 2mH e 200uHDocumento3 páginasFiltro de saída MLP com indutores 2mH e 200uHEliseu PortoAinda não há avaliações
- Conversor CC-CC buck-boost título otimizadoDocumento24 páginasConversor CC-CC buck-boost título otimizadoEduardo Cairolli de NovaesAinda não há avaliações
- Amplificadores Diferenciais Prof EbersonDocumento26 páginasAmplificadores Diferenciais Prof EbersonlipemixsomAinda não há avaliações
- EDG3 - Conversores Digital-AnalógicoDocumento72 páginasEDG3 - Conversores Digital-AnalógicoaurivalAinda não há avaliações
- Retificador monofásico meia onda análiseDocumento26 páginasRetificador monofásico meia onda análiseAlexandreSilvaAinda não há avaliações
- Retificador monofásico meia onda análiseDocumento26 páginasRetificador monofásico meia onda análiseRodolfo VadsonAinda não há avaliações
- Circuitos Elétricos: Respostas CompletasDocumento8 páginasCircuitos Elétricos: Respostas CompletasCarllos LimmaAinda não há avaliações
- Cálculo iterativo de raízes de EdE cúbicasDocumento7 páginasCálculo iterativo de raízes de EdE cúbicasjorge henriqueAinda não há avaliações
- Manutenção preventiva UPSDocumento1 páginaManutenção preventiva UPSSamuel LopesAinda não há avaliações
- Conversores CC CCDocumento47 páginasConversores CC CCRebeca RibeiroAinda não há avaliações
- Carregador de baterias com diodo idealDocumento8 páginasCarregador de baterias com diodo idealrogerio pessanha dos santosAinda não há avaliações
- Sigma (Σ) Soluções Eletromecânicas: Relatório De Ensaios Transformador De Corrente Tipo BuchaDocumento1 páginaSigma (Σ) Soluções Eletromecânicas: Relatório De Ensaios Transformador De Corrente Tipo Buchaviniciustp2Ainda não há avaliações
- AmpOps - Amplificador DiferençaDocumento22 páginasAmpOps - Amplificador Diferençajruzicki100% (1)
- Retificadores monofásicos a diodosDocumento8 páginasRetificadores monofásicos a diodosJoão Dos Reis NetoAinda não há avaliações
- Análise de circuitos RL e defasagem em medições de sinais elétricosDocumento19 páginasAnálise de circuitos RL e defasagem em medições de sinais elétricosGabriel Henrique De Martin AndrettaAinda não há avaliações
- Cap 5Documento23 páginasCap 5Engenheirojamesblayne BlayneAinda não há avaliações
- 2022_ICI_1S_006-convertido(1)(1)Documento5 páginas2022_ICI_1S_006-convertido(1)(1)flavioedu40Ainda não há avaliações
- EL8210 FUNDAMENTOSDocumento28 páginasEL8210 FUNDAMENTOSfajypocuAinda não há avaliações
- Potência em circuitos elétricosDocumento11 páginasPotência em circuitos elétricosMauricioAinda não há avaliações
- Aula 1Documento39 páginasAula 1jeffersansAinda não há avaliações
- Lab03 ENG1041 Serie Paralelo PDFDocumento5 páginasLab03 ENG1041 Serie Paralelo PDFJunior SousaAinda não há avaliações
- Princípios de circuitos elétricos para instalaçõesDocumento3 páginasPrincípios de circuitos elétricos para instalaçõesRogério SantosAinda não há avaliações
- PWM MonafasicoDocumento4 páginasPWM MonafasicoAlysson HyagoAinda não há avaliações
- Transformada de Laplace FundamentosDocumento23 páginasTransformada de Laplace FundamentosAndreea DrăghiciAinda não há avaliações
- Análise de impedâncias em circuitos elétricosDocumento8 páginasAnálise de impedâncias em circuitos elétricosLetyflixAinda não há avaliações
- Slides ACII - Tema 2 Trifásicos (17out20)Documento51 páginasSlides ACII - Tema 2 Trifásicos (17out20)moreira287Ainda não há avaliações
- CAP9Documento13 páginasCAP9alane.teixeira.rAinda não há avaliações
- Aula 1Documento57 páginasAula 1Leandro Souza de FreitasAinda não há avaliações
- Retificação Com Diodos v1.3Documento5 páginasRetificação Com Diodos v1.3Ricardo SantosAinda não há avaliações
- Aula 5Documento21 páginasAula 5Leandro Nogueira LucioAinda não há avaliações
- Slide4-Excitacao Senoidal e Fasores - RefDocumento17 páginasSlide4-Excitacao Senoidal e Fasores - RefPatrick MachadoAinda não há avaliações
- Aplicações Não Lineares Com Amplificador OperacionalDocumento42 páginasAplicações Não Lineares Com Amplificador OperacionalElaine SantosAinda não há avaliações
- Sistemas lineares finitos em lâmpadasDocumento5 páginasSistemas lineares finitos em lâmpadasJeandersonAinda não há avaliações
- Usp Engenharia Eletrônica PotênciaDocumento13 páginasUsp Engenharia Eletrônica PotênciaLuiz HenriqueAinda não há avaliações
- Introdução aos Sistemas EletropneumáticosDocumento5 páginasIntrodução aos Sistemas EletropneumáticosAlfredo Mavungo100% (1)
- Aula 12 - Conversores CCCADocumento17 páginasAula 12 - Conversores CCCAAlexandreAinda não há avaliações
- Introdução aos Retificadores de Meia OndaDocumento18 páginasIntrodução aos Retificadores de Meia OndaCaio GonçalvesAinda não há avaliações
- Comparadores de tensão com histereseDocumento8 páginasComparadores de tensão com histereseGabriel Barbosa PaganiniAinda não há avaliações
- Programação Em C Para Controle De Ângulo De DisparoNo EverandProgramação Em C Para Controle De Ângulo De DisparoAinda não há avaliações
- MSFZ0005 - Cvu26b Vcu30bDocumento7 páginasMSFZ0005 - Cvu26b Vcu30bValdir BerkembrockAinda não há avaliações
- Separação de pigmentos de folhas e canetas por cromatografia em papelDocumento15 páginasSeparação de pigmentos de folhas e canetas por cromatografia em papelRaquel Picanço100% (1)
- ClaudiaPontesFreire PDFDocumento399 páginasClaudiaPontesFreire PDFricardo s silveiraAinda não há avaliações
- Poluição sonora: causas, efeitos e medidas de controleDocumento4 páginasPoluição sonora: causas, efeitos e medidas de controleDaniele E JesseAinda não há avaliações
- Madeira e CoberturasDocumento65 páginasMadeira e CoberturasULYSSES CASTRO DA SILVEIRAAinda não há avaliações
- Leis Ponderais Reações QuímicasDocumento3 páginasLeis Ponderais Reações QuímicasLucasHenriqueAinda não há avaliações
- Isomeria ConstitucionalDocumento9 páginasIsomeria ConstitucionalWillame BezerraAinda não há avaliações
- BandejamentoDocumento6 páginasBandejamentoulissesborgesAinda não há avaliações
- 5 P.D - 2016 (5 Ada - 1 Etapa - Ciclo III) - Mat. 2 Série (E. M) - BPWDocumento2 páginas5 P.D - 2016 (5 Ada - 1 Etapa - Ciclo III) - Mat. 2 Série (E. M) - BPWPriscila MoraisAinda não há avaliações
- Turbo Retard Era X OrcDocumento8 páginasTurbo Retard Era X OrcMabelRinaldiAinda não há avaliações
- Tese - Sobre Portifolio - Jose Roberto ZanellatoDocumento124 páginasTese - Sobre Portifolio - Jose Roberto Zanellatodiogo.chagas02Ainda não há avaliações
- Ementa de Curso Médio IntegradoDocumento133 páginasEmenta de Curso Médio IntegradoEmanoel Fabiano Menezes PereiraAinda não há avaliações
- Rede Primária Compacta 15kV e 25kV - Estruturas Básicas - MoDocumento63 páginasRede Primária Compacta 15kV e 25kV - Estruturas Básicas - MoLeonardo Lisbôa Knüppe100% (3)
- Tutorial CA Beamen ToDocumento19 páginasTutorial CA Beamen TowtkubotaAinda não há avaliações
- Catalogo Retentores SabóDocumento68 páginasCatalogo Retentores Sabó084250100% (1)
- Mensagens inspiradoras da Ciência DivinaDocumento62 páginasMensagens inspiradoras da Ciência DivinaLeandroDeMoraesMedina100% (1)
- Jogos na Orientação ProfissionalDocumento51 páginasJogos na Orientação ProfissionalStewat Mikael Andre100% (1)
- Novo Documento Do Microsoft WordDocumento2 páginasNovo Documento Do Microsoft WordMomade Antonio RihelaAinda não há avaliações
- Um guia prático para encontrar cogumelos mágicosDocumento24 páginasUm guia prático para encontrar cogumelos mágicosThiago Coelho0% (1)
- Colégio Técnico Industrial - Lista de Exercícios de Física IIIDocumento4 páginasColégio Técnico Industrial - Lista de Exercícios de Física IIISalvador SilvaAinda não há avaliações
- Controle de deformação na soldagemDocumento6 páginasControle de deformação na soldagemÍkaro MapaAinda não há avaliações
- Quimica Unama 2009/1Documento3 páginasQuimica Unama 2009/1EditoraAinda não há avaliações
- Aula 3 - Microscopia e Seus AvançosDocumento35 páginasAula 3 - Microscopia e Seus AvançosDaniel ArrudaAinda não há avaliações
- Corporeidade É!Documento3 páginasCorporeidade É!Fabrício LeomarAinda não há avaliações
- Slide Refração Da Luz Dispersão Da Luz Branca e Efeitos AtmosféricosDocumento15 páginasSlide Refração Da Luz Dispersão Da Luz Branca e Efeitos AtmosféricosBianor PauloAinda não há avaliações
- E-Book Terapia Vibracional Quântica - Aum SohamDocumento21 páginasE-Book Terapia Vibracional Quântica - Aum SohamGiovani Grand UrbanoAinda não há avaliações
- RPG 0.7 conceito personagem atributos origem classes perícias equipamentoDocumento1 páginaRPG 0.7 conceito personagem atributos origem classes perícias equipamentoSoulCayzAinda não há avaliações
- Fundição em Molde de Areia UFRGSDocumento6 páginasFundição em Molde de Areia UFRGSRui GalvaniAinda não há avaliações
- Estudo da cristalização a frio do PET para produção de embalagensDocumento9 páginasEstudo da cristalização a frio do PET para produção de embalagensGabriel LazzaronAinda não há avaliações
- Microcirculação, trocas capilares e sistema linfáticoDocumento31 páginasMicrocirculação, trocas capilares e sistema linfáticoReinaldo RiquetAinda não há avaliações