Você também pode gostar
- TCC - Gerenciador de Sistemas Agrícolas Com Supervisão RemotaDocumento84 páginasTCC - Gerenciador de Sistemas Agrícolas Com Supervisão Remotadiogo18spAinda não há avaliações
- TCC Lucas Bueno de Morais 2023 1Documento73 páginasTCC Lucas Bueno de Morais 2023 1Thiago DalmoraAinda não há avaliações
- Faculdade de Americana Curso de Engenharia Elétrica: Smart Water MeterDocumento43 páginasFaculdade de Americana Curso de Engenharia Elétrica: Smart Water MeterretratosfaladoAinda não há avaliações
- pim 1 startupDocumento18 páginaspim 1 startupDênis VlogsAinda não há avaliações
- Vibração de Um Motoredutor em Um Tanque Misturador de 200 Litros Com Sistema de Agitação DesbalanceadoDocumento37 páginasVibração de Um Motoredutor em Um Tanque Misturador de 200 Litros Com Sistema de Agitação DesbalanceadovizonanAinda não há avaliações
- Parte Escrita - Projeto Final de ProgramaçãoDocumento11 páginasParte Escrita - Projeto Final de Programação4KronosAinda não há avaliações
- Análise do ciclo de varredura do CLIC-02Documento45 páginasAnálise do ciclo de varredura do CLIC-02Valter SilvaAinda não há avaliações
- Relatório de Estágio na SulgipeDocumento29 páginasRelatório de Estágio na Sulgipeeldercleiton2011Ainda não há avaliações
- MONOGRAFIA ProjetoSistemaIrrigaçãoDocumento79 páginasMONOGRAFIA ProjetoSistemaIrrigaçãoCarlos ChavesAinda não há avaliações
- Sistemas de Abastecimento de Água para Consumo Humano - Versão Final PDFDocumento113 páginasSistemas de Abastecimento de Água para Consumo Humano - Versão Final PDFVivaldo Palanga100% (1)
- Automaçâo Residencial Na Economia de EnergiaDocumento175 páginasAutomaçâo Residencial Na Economia de EnergiaCarlos Eduardo F Roland100% (1)
- Trabalho TCC Outubro - CORRIGIDO para Eviar EduardoDocumento21 páginasTrabalho TCC Outubro - CORRIGIDO para Eviar Eduardoalexandrehenriquee10Ainda não há avaliações
- DIMERR ManualDocumento26 páginasDIMERR ManualJairo De Carvalho ReduaAinda não há avaliações
- Janela automatizada com sensor de chuvaDocumento110 páginasJanela automatizada com sensor de chuvaLapatechAinda não há avaliações
- 2019 LeonardoRochaMatos TCCDocumento90 páginas2019 LeonardoRochaMatos TCCSalustiano Guimaraes Man SalasAinda não há avaliações
- 2007 AntonioPadilhaLanariBoDocumento137 páginas2007 AntonioPadilhaLanariBoLucas DuarteAinda não há avaliações
- Monografia - Sistema de Monitoramento Automotivo Remoto - V - FinalDocumento86 páginasMonografia - Sistema de Monitoramento Automotivo Remoto - V - Finalgustavo luizAinda não há avaliações
- Desenvolvimento de Uma Bancada de Testes para Motores ElétricosDocumento82 páginasDesenvolvimento de Uma Bancada de Testes para Motores ElétricosIvandro Dantas PantojaAinda não há avaliações
- TCC Felipe Bettin SachetDocumento57 páginasTCC Felipe Bettin SachetAlexsandro Cavalcanti de SouzaAinda não há avaliações
- Centro Universitário Unifacid Curso de Bacharelado em Engenharia ElétricaDocumento80 páginasCentro Universitário Unifacid Curso de Bacharelado em Engenharia ElétricaDiogo CavalcanteAinda não há avaliações
- TCC - Avaliação de Produtividade Do Trator Massey Ferguson 250xe Advanced Na Preparação Do SoloDocumento50 páginasTCC - Avaliação de Produtividade Do Trator Massey Ferguson 250xe Advanced Na Preparação Do Sololeo644135Ainda não há avaliações
- Monitor gas cylinderDocumento52 páginasMonitor gas cylinderJosé Manuel RomãoAinda não há avaliações
- Análise Manutenção GestãoDocumento46 páginasAnálise Manutenção GestãoGaldino CoelhoAinda não há avaliações
- 2021 Dyaronan Alves ModelDocumento70 páginas2021 Dyaronan Alves ModelHugo manuelAinda não há avaliações
- PIM3SEMESTREDocumento34 páginasPIM3SEMESTREDênis VlogsAinda não há avaliações
- Dimensionamento e Fabricação de Uma Bancada para Dosadores Volumétricos PDFDocumento37 páginasDimensionamento e Fabricação de Uma Bancada para Dosadores Volumétricos PDFLucas HenriqueAinda não há avaliações
- Apresentação e Aplicação Do Software AnafasDocumento126 páginasApresentação e Aplicação Do Software Anafasadelmo souzaAinda não há avaliações
- Bancada teste motores industriaisDocumento30 páginasBancada teste motores industriaisDavi BackupAinda não há avaliações
- 0a046 Silva, C. J. A. Manutencao Preditiva Com Tecnologia Iot Atraves de Sensores de Vibracao em Motores de Inducao. TCC, 2019 PDFDocumento96 páginas0a046 Silva, C. J. A. Manutencao Preditiva Com Tecnologia Iot Atraves de Sensores de Vibracao em Motores de Inducao. TCC, 2019 PDFLucas MacedoAinda não há avaliações
- Monitoramento AquapônicoDocumento95 páginasMonitoramento AquapônicoindioAinda não há avaliações
- Definição das Metodologias e Procedimentos para Medição de Indicadores de DesempenhoDocumento398 páginasDefinição das Metodologias e Procedimentos para Medição de Indicadores de DesempenhoGustavo Luís dos Santos RiêraAinda não há avaliações
- Torque HidrodinâmicoDocumento113 páginasTorque HidrodinâmicoGustavo José Gonçalves MollicaAinda não há avaliações
- Instalação e funcionamento da lavadora extratora hospitalar SITECDocumento30 páginasInstalação e funcionamento da lavadora extratora hospitalar SITECPaulo Alexandre - Supervisor Manutenção HCTCO100% (1)
- Manual do utilizador do analisador automático A15Documento40 páginasManual do utilizador do analisador automático A15Glauber Costa82% (11)
- Curso de Remapeamento Ecm2001Documento156 páginasCurso de Remapeamento Ecm2001Elétron Truck100% (1)
- Propostas metodológicas para tratar curva de aversão a riscoDocumento108 páginasPropostas metodológicas para tratar curva de aversão a riscorenan_andrade2924Ainda não há avaliações
- Implementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvNo EverandImplementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvAinda não há avaliações
- Relatorio1 - CópiaDocumento25 páginasRelatorio1 - CópiaJulia DubocAinda não há avaliações
- APOSTILA 02 - 5606 Aux. Serv. ElétricosDocumento101 páginasAPOSTILA 02 - 5606 Aux. Serv. ElétricosCarlosAinda não há avaliações
- Impacto Da Geração Distribuída Fotovoltaica Na Localização de Faltas em Redes de Distribuição RadiaisDocumento76 páginasImpacto Da Geração Distribuída Fotovoltaica Na Localização de Faltas em Redes de Distribuição Radiaisrodrigo rianellyAinda não há avaliações
- Relatório de Estágio em Sistema de AvaliaçãoDocumento25 páginasRelatório de Estágio em Sistema de AvaliaçãoLuis Henrique SiqueiraAinda não há avaliações
- Planejamento de Cobertura de Sistemas GSM com Uso de RepetidoresDocumento119 páginasPlanejamento de Cobertura de Sistemas GSM com Uso de RepetidoresAxel CorradineAinda não há avaliações
- Relatório EstágioDocumento12 páginasRelatório EstágioJony LencinAinda não há avaliações
- PFC Eduardo - Guilherme - Victor Ac-19557Documento56 páginasPFC Eduardo - Guilherme - Victor Ac-19557Idamara Lobo DiasAinda não há avaliações
- Otimização de Um Analisador de Gás Dissolvido em Óleo de Múltiplos Transformadores de PotênciaDocumento111 páginasOtimização de Um Analisador de Gás Dissolvido em Óleo de Múltiplos Transformadores de PotênciaThalita LourranyAinda não há avaliações
- Cálculo de Pêndulo Invertido PDFDocumento70 páginasCálculo de Pêndulo Invertido PDFWagner AugustoAinda não há avaliações
- GAMUNGA PLANO ACTUALIZADODocumento24 páginasGAMUNGA PLANO ACTUALIZADOjoaoconde3Ainda não há avaliações
- Retrofitting da Alimentação de PapelDocumento71 páginasRetrofitting da Alimentação de PapelBruno OliveiraAinda não há avaliações
- CYPEVAC 3D Manual Do UtilizadorDocumento223 páginasCYPEVAC 3D Manual Do UtilizadorPedro SantosAinda não há avaliações
- Monitoramento de condição de unidade geradora hidrelétrica utilizando técnicas estatísticas multivariadasDocumento75 páginasMonitoramento de condição de unidade geradora hidrelétrica utilizando técnicas estatísticas multivariadasOrenço JumaAinda não há avaliações
- MONOGRAFIA Desenvolvimento Controle Sist SdferkmvDocumento55 páginasMONOGRAFIA Desenvolvimento Controle Sist SdferkmvDaniel PereiraAinda não há avaliações
- Haptic System For Teaching Manipulators: F E U PDocumento98 páginasHaptic System For Teaching Manipulators: F E U PJose LuisAinda não há avaliações
- TCC - SISTEMA DE IRRIGAÇÃO INTELIGENTE-2023Documento24 páginasTCC - SISTEMA DE IRRIGAÇÃO INTELIGENTE-2023gabihipolito27Ainda não há avaliações
- Auxiliar de Eletricidade PredialDocumento101 páginasAuxiliar de Eletricidade Predialcharada1337Ainda não há avaliações
- Manual Planilha Pracas de PedagioDocumento32 páginasManual Planilha Pracas de PedagioJoão Adolfo FassarellaAinda não há avaliações
- Monog 09 2 Seguidor de LinhaDocumento36 páginasMonog 09 2 Seguidor de LinharafaelpouzadaAinda não há avaliações
- Manual 20monitor 20de 20plantio 20MPA2500Documento43 páginasManual 20monitor 20de 20plantio 20MPA2500alisson mateus oliveira pereira100% (9)
- NR 11 - Sistema de Gerenciamento de Cargas de BateriaDocumento164 páginasNR 11 - Sistema de Gerenciamento de Cargas de BateriaCPSSTAinda não há avaliações
- Meu TrabalhoDocumento31 páginasMeu Trabalhowiderla.Ainda não há avaliações
- Plano Analitico. Introducao A Engenharia ElectricaDocumento13 páginasPlano Analitico. Introducao A Engenharia ElectricaQuelton NgulubeAinda não há avaliações
- Propriedade intelectuaL-Marcas-1......Documento17 páginasPropriedade intelectuaL-Marcas-1......Quelton NgulubeAinda não há avaliações
- Aula 1Documento4 páginasAula 1Quelton NgulubeAinda não há avaliações
- Normas e processos de soldadura em tanques e tubulaçõesDocumento11 páginasNormas e processos de soldadura em tanques e tubulaçõesQuelton NgulubeAinda não há avaliações
- CV GocaldásDocumento2 páginasCV GocaldásQuelton NgulubeAinda não há avaliações
- ÍndiceDocumento15 páginasÍndiceQuelton NgulubeAinda não há avaliações
- API 1104-05BilingueCorpo Da NormaDocumento172 páginasAPI 1104-05BilingueCorpo Da Normalucas171adrianoAinda não há avaliações
- Horario Eléctrica 1o Semestre 2023 - 17 - 04Documento3 páginasHorario Eléctrica 1o Semestre 2023 - 17 - 04Quelton NgulubeAinda não há avaliações
- Plano orçamental pessoal e negócio trimestralDocumento2 páginasPlano orçamental pessoal e negócio trimestralQuelton NgulubeAinda não há avaliações
- Exma Senhora Directora Geral Do Instituto de Bolsas de EstudoDocumento1 páginaExma Senhora Directora Geral Do Instituto de Bolsas de EstudoQuelton NgulubeAinda não há avaliações
- Resumo e IntroduçãoDocumento11 páginasResumo e IntroduçãoQuelton NgulubeAinda não há avaliações
- Reakizar Tratamentos Térmicos e Ensaios de Materiais Se Componentes MecânicosDocumento1 páginaReakizar Tratamentos Térmicos e Ensaios de Materiais Se Componentes MecânicosQuelton NgulubeAinda não há avaliações
- Propriedades Do AçoDocumento10 páginasPropriedades Do AçoQuelton NgulubeAinda não há avaliações
- Ficha de Verificação RA5Documento2 páginasFicha de Verificação RA5Quelton NgulubeAinda não há avaliações
- Plano OrçamentalDocumento3 páginasPlano OrçamentalQuelton Ngulube100% (1)
- Guia de manutenção e segurança para cortador de legumes CLFV300Documento9 páginasGuia de manutenção e segurança para cortador de legumes CLFV300Quelton NgulubeAinda não há avaliações
- Exercicios Diagramas TTTDocumento4 páginasExercicios Diagramas TTTQuelton NgulubeAinda não há avaliações
- Sinopse Inhassoro Exemplar1Documento3 páginasSinopse Inhassoro Exemplar1Quelton NgulubeAinda não há avaliações
- Sistema de elevação para oficinas mecânicasDocumento2 páginasSistema de elevação para oficinas mecânicasQuelton NgulubeAinda não há avaliações
- GoveiaDocumento3 páginasGoveiaQuelton NgulubeAinda não há avaliações
- Tipos de CavacosDocumento8 páginasTipos de CavacosQuelton NgulubeAinda não há avaliações
- Ferro Fundid O: Diagrama de Equilibrio Das Ligas Ferro-CarbonoDocumento4 páginasFerro Fundid O: Diagrama de Equilibrio Das Ligas Ferro-CarbonoQuelton NgulubeAinda não há avaliações
- Relatório sobre manutenção de portão, veículos e calandraDocumento1 páginaRelatório sobre manutenção de portão, veículos e calandraQuelton NgulubeAinda não há avaliações
- Descascador Manual de Amendoim. Alternativa para O Peaueno ProdutorDocumento24 páginasDescascador Manual de Amendoim. Alternativa para O Peaueno ProdutorQuelton NgulubeAinda não há avaliações
- BelzraDocumento15 páginasBelzraQuelton NgulubeAinda não há avaliações
- Maquina Bili DadeDocumento7 páginasMaquina Bili DadeQuelton NgulubeAinda não há avaliações
- Cavacos IntroduçãoDocumento1 páginaCavacos IntroduçãoQuelton NgulubeAinda não há avaliações
- Propriedades Requeridas para Aços FerramentaDocumento7 páginasPropriedades Requeridas para Aços FerramentaQuelton NgulubeAinda não há avaliações
- Certificado Vocacional em Mecânica Geral sobre Análise da Situação de Gestão de Óleos LubrificantesDocumento1 páginaCertificado Vocacional em Mecânica Geral sobre Análise da Situação de Gestão de Óleos LubrificantesQuelton NgulubeAinda não há avaliações
- 16 Escavação, Locação Da Obra E InfraestruturaDocumento6 páginas16 Escavação, Locação Da Obra E InfraestruturaRafael de Oliveira DiasAinda não há avaliações
- ManifestoDocumento1 páginaManifestoPoint DogAinda não há avaliações
- Manual Maquina de Solda TRR 3410S MNRDocumento10 páginasManual Maquina de Solda TRR 3410S MNRObsol EtoAinda não há avaliações
- Atualizações firmware IWR 3000NDocumento5 páginasAtualizações firmware IWR 3000NMedson AGuiarAinda não há avaliações
- Cartilha Habitação v3Documento37 páginasCartilha Habitação v3Conceição DuarteAinda não há avaliações
- 10 04 2014Documento104 páginas10 04 2014renatokawaAinda não há avaliações
- Uso da tecnologia bipolar em circuitos integrados atuaisDocumento15 páginasUso da tecnologia bipolar em circuitos integrados atuaisJessica JacksonAinda não há avaliações
- Atividade Prática Final - Introdução Ao AutocadDocumento4 páginasAtividade Prática Final - Introdução Ao AutocadNádia OliveiraAinda não há avaliações
- Catalogo Acessorio NopriceDocumento81 páginasCatalogo Acessorio NopriceKleber CaetanoAinda não há avaliações
- Projeto Erasmus de Engenharia EletrotécnicaDocumento219 páginasProjeto Erasmus de Engenharia EletrotécnicabrunofunchasAinda não há avaliações
- Nova mídia e comunicaçãoDocumento3 páginasNova mídia e comunicaçãoDaniela LaurindoAinda não há avaliações
- Portas Lógicas Aula 3Documento40 páginasPortas Lógicas Aula 3Waldir De Souza MotaAinda não há avaliações
- Diário de Bordo - EncarregadoDocumento3 páginasDiário de Bordo - EncarregadoHudson OliveiraAinda não há avaliações
- POP - SMPO.001 - Análise de Pleitos Da Ata de ProjetosDocumento14 páginasPOP - SMPO.001 - Análise de Pleitos Da Ata de ProjetosLigia ClausenAinda não há avaliações
- Texto de ApoioDocumento8 páginasTexto de ApoioDomZitoLopesAinda não há avaliações
- PCAM4020PN Manual de Instalacao AlphadigiDocumento13 páginasPCAM4020PN Manual de Instalacao AlphadigiAndre ImamuraAinda não há avaliações
- Catálogo de Peças: Colheitadeira Autopropelida S550 STSDocumento1.348 páginasCatálogo de Peças: Colheitadeira Autopropelida S550 STSalisson mateus oliveira pereiraAinda não há avaliações
- Evolução Dos Computadores 1971-1980Documento15 páginasEvolução Dos Computadores 1971-1980Rafael BertoliniAinda não há avaliações
- FTQ Cartas Criaturas Template EditavelDocumento2 páginasFTQ Cartas Criaturas Template EditavelGeek TrekAinda não há avaliações
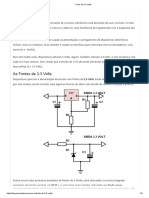
- Fonte de 3.3 VoltsDocumento3 páginasFonte de 3.3 Voltsjoao0honoratoAinda não há avaliações
- ISO21503Documento21 páginasISO21503cass78Ainda não há avaliações
- Currículo para Professor de Segurança Do TrabalhoDocumento3 páginasCurrículo para Professor de Segurança Do TrabalhoescolacetecAinda não há avaliações
- Python PenetraçãoDocumento178 páginasPython Penetraçãojuniormj1100% (1)
- 5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarDocumento14 páginas5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarpatricialandiAinda não há avaliações
- Sistema Hotel Gerencia Estadias HospedesDocumento2 páginasSistema Hotel Gerencia Estadias HospedesMatheus MoraesAinda não há avaliações
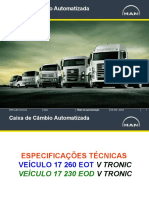
- Apresentação CX Automatizada Padrão MANDocumento96 páginasApresentação CX Automatizada Padrão MANjohnny sabin100% (1)
- Resenha Texto 9Documento2 páginasResenha Texto 9Andrea SilvaAinda não há avaliações
- Relação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasDocumento79 páginasRelação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasLeonardo Diniz de LimaAinda não há avaliações
- Proposta SECTIGO P20040901Documento6 páginasProposta SECTIGO P20040901marcusmsAinda não há avaliações
- Atividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDocumento3 páginasAtividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDiegoAlves100% (2)