Você também pode gostar
- Manual de Instruções DH-65/65L S2Documento166 páginasManual de Instruções DH-65/65L S2Sergio Gonzalez Guzman100% (1)
- CLP: Uma introdução prática aos controladores lógicos programáveisDocumento37 páginasCLP: Uma introdução prática aos controladores lógicos programáveism. messias amaral100% (1)
- Sistemas Logicos Programaveis 1Documento20 páginasSistemas Logicos Programaveis 1Eduardo Miranda100% (4)
- Conceitos básicos sobre controladores programáveis e pontos de entrada e saídaDocumento20 páginasConceitos básicos sobre controladores programáveis e pontos de entrada e saídaluisfilipeminenerva0% (1)
- Manual Reno 30kDocumento26 páginasManual Reno 30kHedlund Erik100% (1)
- Aula 01 - Introducao e Arquitetura Basica Do CLPDocumento29 páginasAula 01 - Introducao e Arquitetura Basica Do CLPPedro Vieira100% (2)
- Marcelo Eurípedes Da Silva, Fevereiro de 2007Documento40 páginasMarcelo Eurípedes Da Silva, Fevereiro de 2007Rafael Marques100% (2)
- Aula #02 - Histórico e Características Técnicas de CLPsDocumento57 páginasAula #02 - Histórico e Características Técnicas de CLPsJoão Marcos OliveiraAinda não há avaliações
- Aula 04 - Automação PredialDocumento39 páginasAula 04 - Automação PredialMauroAinda não há avaliações
- Apostila de CLP - Blocos LogicosDocumento32 páginasApostila de CLP - Blocos Logicosjucadosb100% (4)
- Controladores programáveis: evolução e aplicaçõesDocumento4 páginasControladores programáveis: evolução e aplicaçõesMarcelo da CaatingaAinda não há avaliações
- PLC Ling LadderDocumento48 páginasPLC Ling LadderLuis Miguel C. R. MagalhaesAinda não há avaliações
- CLP: Funcionamento e aplicaçõesDocumento4 páginasCLP: Funcionamento e aplicaçõesJoão Marcelo RomanoAinda não há avaliações
- Aula 2(0) - IntroduçãoDocumento59 páginasAula 2(0) - IntroduçãoYan AraújoAinda não há avaliações
- CLPs: introdução aos controladores lógicos programáveisDocumento65 páginasCLPs: introdução aos controladores lógicos programáveisEgidio BuffonAinda não há avaliações
- Questões de CLPDocumento5 páginasQuestões de CLPmarrins415Ainda não há avaliações
- CLP MicrologixDocumento290 páginasCLP MicrologixMauro H. S. WencelewskiAinda não há avaliações
- Apostila de CLPs - LadderDocumento40 páginasApostila de CLPs - Ladderpososviki80% (5)
- ÍndiceDocumento9 páginasÍndiceËnesson VicenteAinda não há avaliações
- O que é um CLP e suas principais funcionalidadesDocumento7 páginasO que é um CLP e suas principais funcionalidadesDiego SouzaAinda não há avaliações
- Introdução a Controladores Lógicos ProgramáveisDocumento40 páginasIntrodução a Controladores Lógicos ProgramáveisRafael Pereira Goncalves100% (1)
- Power Point CLPDocumento40 páginasPower Point CLPLucas MacedoAinda não há avaliações
- Automação e Programação de CLPSDocumento8 páginasAutomação e Programação de CLPSTheFabio220478Ainda não há avaliações
- Apostila CLP ClicEdit AlexandreDocumento26 páginasApostila CLP ClicEdit AlexandreJoão Dias da SilveiraAinda não há avaliações
- CLP - Controladores Lógicos ProgramáveisDocumento100 páginasCLP - Controladores Lógicos ProgramáveisAnonymous fBjdRyyAinda não há avaliações
- 1 Lc700 Tecnologia r2Documento71 páginas1 Lc700 Tecnologia r2JulianodeLimaAinda não há avaliações
- Aula4 - CLPDocumento23 páginasAula4 - CLPedijadsonAinda não há avaliações
- Relatório sobre prática com CLP para controle de bomba e resistênciaDocumento10 páginasRelatório sobre prática com CLP para controle de bomba e resistênciaHigor Mateus Oliveira dos SantosAinda não há avaliações
- Família de Controladores Allen-Bradley - RockwellDocumento159 páginasFamília de Controladores Allen-Bradley - RockwellJulio Cesar T ProcopioAinda não há avaliações
- PLC 01Documento51 páginasPLC 01Carlos Eduardo Viana SilvaAinda não há avaliações
- CLP1Documento29 páginasCLP1Zickson ManjateAinda não há avaliações
- Clpcompleta 120821073625 Phpapp01Documento45 páginasClpcompleta 120821073625 Phpapp01CARLOS BARBOSAAinda não há avaliações
- Introdução Ao Controlador Lógico Programado (CLP)Documento66 páginasIntrodução Ao Controlador Lógico Programado (CLP)Franklin TertulianoAinda não há avaliações
- Programação do CLP Micrologix 1400Documento40 páginasProgramação do CLP Micrologix 1400Marciel Dervansoki71% (7)
- Controladores Programaveis Introducao Conceitual HistoricaDocumento30 páginasControladores Programaveis Introducao Conceitual HistoricaConrado Guimarães100% (1)
- CLP: Princípios de funcionamentoDocumento17 páginasCLP: Princípios de funcionamentoNelson Ananias ChauAinda não há avaliações
- Aula 1 2 (PPT) - PLCDocumento49 páginasAula 1 2 (PPT) - PLCJoão VitorAinda não há avaliações
- Introdução ao CLP: História e FuncionamentoDocumento50 páginasIntrodução ao CLP: História e FuncionamentoDinho Pinheiro100% (1)
- Padrão Slide LADDERDocumento18 páginasPadrão Slide LADDERMarcos BiãoAinda não há avaliações
- Controle de Processos IndustriaisDocumento9 páginasControle de Processos IndustriaisallanAinda não há avaliações
- Aula 2Documento17 páginasAula 2Dayana VieiraAinda não há avaliações
- 6495 Assessoria Atividade 2 - Informática Industrial - 51 2024Documento3 páginas6495 Assessoria Atividade 2 - Informática Industrial - 51 2024matheus koniczAinda não há avaliações
- CLP: Controladores Lógicos ProgramáveisDocumento53 páginasCLP: Controladores Lógicos Programáveisjoselio8100% (1)
- PLCs e automação industrialDocumento16 páginasPLCs e automação industrialEdnercio Luis100% (1)
- Tipos e capacidades dos CLPsDocumento108 páginasTipos e capacidades dos CLPsIgor CotrimAinda não há avaliações
- Automação II: CLP, programação e aplicaçõesDocumento99 páginasAutomação II: CLP, programação e aplicaçõeswa_moreira100% (2)
- Funcionamento e componentes de um PLCDocumento14 páginasFuncionamento e componentes de um PLCEdnercio LuisAinda não há avaliações
- CLP-Introdução a Automação e Sistemas de ControleDocumento84 páginasCLP-Introdução a Automação e Sistemas de ControleGilnei LoschAinda não há avaliações
- CADSIM PLC trabalhoDocumento15 páginasCADSIM PLC trabalhoLuther BuqueAinda não há avaliações
- 1.a Aula CLP Ifsp SPDocumento59 páginas1.a Aula CLP Ifsp SPWanderley Terci EstevesAinda não há avaliações
- CLP SensoresDocumento78 páginasCLP SensoresnilsoneryAinda não há avaliações
- Aspectos GeraisDocumento35 páginasAspectos GeraisSergio GamaAinda não há avaliações
- Aplicação De Smart Home Com Reconhecimento De Voz Usando Módulo Spce061a, Pic18f1220 E C18No EverandAplicação De Smart Home Com Reconhecimento De Voz Usando Módulo Spce061a, Pic18f1220 E C18Ainda não há avaliações
- Infolev Ifl 750Documento54 páginasInfolev Ifl 750Junior Braga100% (1)
- Curso de Microcontroladores PIC 16F84ADocumento25 páginasCurso de Microcontroladores PIC 16F84AVITOR HUGOAinda não há avaliações
- Lista 2Documento4 páginasLista 2Marcus ViniciusAinda não há avaliações
- Dados Tecnicos MBB Accelo 815 Plataforma 4 X 2Documento2 páginasDados Tecnicos MBB Accelo 815 Plataforma 4 X 2Rogério Caiado MachadoAinda não há avaliações
- Guindaste TkaDocumento12 páginasGuindaste TkaMACHINERY101GEAR100% (1)
- Arduino UNO - Conheça o Hardware Da Placa Arduino em DetalhesDocumento23 páginasArduino UNO - Conheça o Hardware Da Placa Arduino em DetalhesJudáAmorimAinda não há avaliações
- Lavadora industrial J75/15 220V 60HzDocumento12 páginasLavadora industrial J75/15 220V 60HzDionei SchwadeAinda não há avaliações
- Redes e Protocolos Multimédia - Hardware, Software e Dispositivos de ArmazenamentoDocumento37 páginasRedes e Protocolos Multimédia - Hardware, Software e Dispositivos de ArmazenamentoNanda F. FozAinda não há avaliações
- Mi TV Stick Xiaomi a partir R$251, conheça outros streamings baratosDocumento5 páginasMi TV Stick Xiaomi a partir R$251, conheça outros streamings baratosPaulocesarmedAinda não há avaliações
- Splitvent Sicflux Renovador de Ar Bivolt Filtros G4 E M5 ÚnicoDocumento6 páginasSplitvent Sicflux Renovador de Ar Bivolt Filtros G4 E M5 ÚnicoTúlioSoutoMaiorAinda não há avaliações
- Contatores, Relés Térmicos e Relés TemporizadoresDocumento7 páginasContatores, Relés Térmicos e Relés TemporizadoresJosé CadeteAinda não há avaliações
- SSH5 Sensor Hall para segurançaDocumento1 páginaSSH5 Sensor Hall para segurançaFelipe GodinhoAinda não há avaliações
- Catálogo Luminária Anti-Explosão GMDocumento2 páginasCatálogo Luminária Anti-Explosão GMleandro0309Ainda não há avaliações
- Manual de peças de empilhadeiraDocumento46 páginasManual de peças de empilhadeiraValmir Diny KelyAinda não há avaliações
- Cubo Traseiro 4CXDocumento2 páginasCubo Traseiro 4CXTatiano BrolloAinda não há avaliações
- Relatório infra elétrica externa 2018 BHDocumento31 páginasRelatório infra elétrica externa 2018 BHLeonardo Rocha TeixeiraAinda não há avaliações
- Compactador multifuncional BMP 8500Documento2 páginasCompactador multifuncional BMP 8500ArturoAinda não há avaliações
- Relatório Máquinas e EquipamentosDocumento29 páginasRelatório Máquinas e EquipamentosFábio LopesAinda não há avaliações
- Meritor Catálogo Cruzetas Dados CadastroDocumento2 páginasMeritor Catálogo Cruzetas Dados CadastroLEODECIO BELO DE OLIVEIRA100% (3)
- Manual Tecnico de Instalacao Pro 4.54 Dy - Rev.00.1481029157Documento2 páginasManual Tecnico de Instalacao Pro 4.54 Dy - Rev.00.1481029157Eder LopesAinda não há avaliações
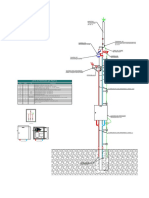
- Detalhe SPDA PosteDocumento1 páginaDetalhe SPDA PosteJosi MirandaAinda não há avaliações
- D6N Tractor Track Type TroubleshootingDocumento6 páginasD6N Tractor Track Type TroubleshootingHelioAinda não há avaliações
- Aula03 - So (Modo de Compatibilidade)Documento28 páginasAula03 - So (Modo de Compatibilidade)IsaacMedeirosAinda não há avaliações
- Dados do Setor de Duas Rodas 2020Documento75 páginasDados do Setor de Duas Rodas 2020Paulo SouzaAinda não há avaliações
- Guia Rápido Veichi AC10 v1.7Documento20 páginasGuia Rápido Veichi AC10 v1.7ktecnologAinda não há avaliações
- Instalações básicas para construção de redes de distribuição urbanasDocumento194 páginasInstalações básicas para construção de redes de distribuição urbanasHelder NascimentoAinda não há avaliações
- Práticas aprendizagem Eletricista Manutenção EletroeletrônicaDocumento2 páginasPráticas aprendizagem Eletricista Manutenção EletroeletrônicaGilcimar CardosoAinda não há avaliações
- Pedido Compras ControleDocumento36 páginasPedido Compras ControlepbcanhaAinda não há avaliações