Você também pode gostar
- Exerccios de Administracao FinanceiraDocumento71 páginasExerccios de Administracao Financeiratiagoepp67% (3)
- Futevolei Maior EbookDocumento70 páginasFutevolei Maior EbookLUIZ BONFA DOS SANTOSAinda não há avaliações
- Modelos ARIMA-2017 PDFDocumento36 páginasModelos ARIMA-2017 PDFJabulani2010Ainda não há avaliações
- Relatorio de Controle - Funções de TransferênciaDocumento38 páginasRelatorio de Controle - Funções de TransferênciaLuis AraujoAinda não há avaliações
- RevisaoDocumento3 páginasRevisaoDivisão de Planejamento e Normatização DPN100% (2)
- Exercícios Resolvidos: Frequência Absoluta, Relativa e AcumuladaDocumento9 páginasExercícios Resolvidos: Frequência Absoluta, Relativa e AcumuladaDiego Oliveira100% (6)
- Lista 3Documento6 páginasLista 3annaceciliaassisAinda não há avaliações
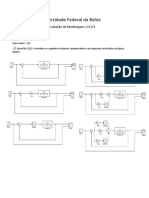
- 2° Prova Modelagem 2023 - 1Documento4 páginas2° Prova Modelagem 2023 - 1Prof. Eduardo NunesAinda não há avaliações
- Lista Controle Digital UnicampDocumento8 páginasLista Controle Digital UnicampMatheus de MirandaAinda não há avaliações
- Lista Exercicio CompletaDocumento17 páginasLista Exercicio CompletaVinícius Moreira SouzaAinda não há avaliações
- Capítulo 6Documento111 páginasCapítulo 6Barbara OliveiraAinda não há avaliações
- MecB EMSC2 2011 CPP FCT1Documento5 páginasMecB EMSC2 2011 CPP FCT1nibetiv895Ainda não há avaliações
- Aula 8Documento20 páginasAula 8Ana Beatriz BrazAinda não há avaliações
- MetFisCom MecQuantica Aula24 Sist2Niveis 2020Documento12 páginasMetFisCom MecQuantica Aula24 Sist2Niveis 2020Lane LopesAinda não há avaliações
- Exercicios Cap3 RespostasDocumento5 páginasExercicios Cap3 RespostasGabriel MazzoniAinda não há avaliações
- EngenhariadeControle ListaDeExerciciosDocumento23 páginasEngenhariadeControle ListaDeExerciciosEmilly CarvalhoAinda não há avaliações
- ListassasDocumento20 páginasListassasGabriel RamosAinda não há avaliações
- Lista 1Documento3 páginasLista 1luis volpeAinda não há avaliações
- Prova PDFDocumento3 páginasProva PDFDrik SullesAinda não há avaliações
- Lista 01 de CVV 1s 2024Documento5 páginasLista 01 de CVV 1s 2024leleve1411Ainda não há avaliações
- Exerci Cio S Rev IsaoDocumento2 páginasExerci Cio S Rev IsaoHigor BortoliniAinda não há avaliações
- Trabalho 2 Controle IIDocumento21 páginasTrabalho 2 Controle IIlucasalexandreAinda não há avaliações
- Exercícios Antes P1 - Sistemas de ControleDocumento2 páginasExercícios Antes P1 - Sistemas de ControlechikincvoAinda não há avaliações
- Tarefa 3 - ConvuluçãoDocumento1 páginaTarefa 3 - ConvuluçãomariaeduardabatudAinda não há avaliações
- 3 Lista - Fourier - RespondidaDocumento11 páginas3 Lista - Fourier - RespondidaHigor FerreiraAinda não há avaliações
- Lista 6-1Documento3 páginasLista 6-1Fernando V RaveloAinda não há avaliações
- Notas de Aula Conceitos Básicos de Controle - 2018.2Documento37 páginasNotas de Aula Conceitos Básicos de Controle - 2018.2anderssonoliveiraAinda não há avaliações
- 2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciaDocumento49 páginas2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciahinnaAinda não há avaliações
- Lista 1Documento24 páginasLista 1PeboAinda não há avaliações
- Lista 1Documento22 páginasLista 1Ricardo TeixeiraAinda não há avaliações
- Lista 1Documento8 páginasLista 1Sâmela RochaAinda não há avaliações
- Lista de Exercícios Aulas 4 e 5 6Documento4 páginasLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiAinda não há avaliações
- Controle Ótimo - Parte 1Documento44 páginasControle Ótimo - Parte 1Mauro VasconcellosAinda não há avaliações
- Lista 1 Funções Limites Continuidade e Derivadas ParciaisDocumento6 páginasLista 1 Funções Limites Continuidade e Derivadas ParciaisJosé Rosa de Souza FariasAinda não há avaliações
- Mapa Calculo 1Documento4 páginasMapa Calculo 1LeandroAinda não há avaliações
- Lista de Aplicação - Semana 6Documento3 páginasLista de Aplicação - Semana 6Bárbara MourãoAinda não há avaliações
- Provas Mestrado UFRNDocumento9 páginasProvas Mestrado UFRNDiego SouzaAinda não há avaliações
- Apostila MCAEDocumento78 páginasApostila MCAEDébora VitóriaAinda não há avaliações
- Prova1 2018 2Documento2 páginasProva1 2018 2Carlos Aurélio Faria da RochaAinda não há avaliações
- ALista20 - Integrais TrigonometricasDocumento2 páginasALista20 - Integrais Trigonometricasana luisaAinda não há avaliações
- Semana 06ap GabDocumento5 páginasSemana 06ap GabVitoria MirandaAinda não há avaliações
- Aula 2 - Sistemas Com 1 GDL Com AmortecimentoDocumento28 páginasAula 2 - Sistemas Com 1 GDL Com AmortecimentoJoão Vítor Cavalcanti DuarteAinda não há avaliações
- Aula 04 - Modelagem de Sinais e SistemasDocumento4 páginasAula 04 - Modelagem de Sinais e SistemasjorgedemedeirosAinda não há avaliações
- Lista SistemasDocumento2 páginasLista SistemasEduardo ReisAinda não há avaliações
- CSTD - Lista de Exercícios - Parte CDocumento5 páginasCSTD - Lista de Exercícios - Parte CWillian Flávio Batista de VargasAinda não há avaliações
- CE 2023 2024 Enunciado Primeira Atividade LaboratorialDocumento1 páginaCE 2023 2024 Enunciado Primeira Atividade Laboratorialguipedreiro21Ainda não há avaliações
- Lista 1 EDO2Documento1 páginaLista 1 EDO2Thayná BarbosaAinda não há avaliações
- Lista SistemasDocumento2 páginasLista SistemasEduardo ReisAinda não há avaliações
- SSE Lista1Documento7 páginasSSE Lista1Gabriel de CarvalhoAinda não há avaliações
- RECUERAÇÃO 3bDocumento2 páginasRECUERAÇÃO 3bAugusto PereiraAinda não há avaliações
- Ficha Formativa - Taxa de Variação de Uma Função e DerivadasDocumento9 páginasFicha Formativa - Taxa de Variação de Uma Função e DerivadasSandra Cristina FernandesAinda não há avaliações
- 9 - Análise ModalDocumento10 páginas9 - Análise ModalArthur RafaelAinda não há avaliações
- Semana 06apDocumento3 páginasSemana 06apVitoria MirandaAinda não há avaliações
- Lista 2Documento4 páginasLista 2maurilio paiaoAinda não há avaliações
- Cap5 - Espaco de Estados DiscretoDocumento11 páginasCap5 - Espaco de Estados DiscretowilsonAinda não há avaliações
- 404 895 1 SMDocumento8 páginas404 895 1 SMSaNunesAinda não há avaliações
- ExamesDocumento2 páginasExamesFrancisco MarquesAinda não há avaliações
- Função de TransferênciaDocumento27 páginasFunção de TransferênciaAllan GumesAinda não há avaliações
- Métodos Numéricos e ProgramaçãoDocumento9 páginasMétodos Numéricos e ProgramaçãoWique TaundeAinda não há avaliações
- Trabalho Meio CarroDocumento10 páginasTrabalho Meio CarrorildotaffarelAinda não há avaliações
- Apostila Controle - 03 - Função de Transferência e Diagrama de BlocosDocumento35 páginasApostila Controle - 03 - Função de Transferência e Diagrama de Blocoslnery_1Ainda não há avaliações
- Semana 7 AplicaçãoDocumento3 páginasSemana 7 Aplicaçãomar.granjeiro.henriqueAinda não há avaliações
- Lista 4Documento3 páginasLista 4luis volpeAinda não há avaliações
- Decreto - Municipal Implantacao NfseDocumento19 páginasDecreto - Municipal Implantacao NfseLUIZ BONFA DOS SANTOSAinda não há avaliações
- Iptu 2023 - DecretoDocumento2 páginasIptu 2023 - DecretoLUIZ BONFA DOS SANTOSAinda não há avaliações
- Edital Pss 038 2023 PDFDocumento32 páginasEdital Pss 038 2023 PDFLUIZ BONFA DOS SANTOSAinda não há avaliações
- CopiarDocumento1 páginaCopiarLUIZ BONFA DOS SANTOSAinda não há avaliações
- Lei de CoulombDocumento3 páginasLei de CoulombLUIZ BONFA DOS SANTOSAinda não há avaliações
- Lei de CoulombDocumento3 páginasLei de CoulombLUIZ BONFA DOS SANTOSAinda não há avaliações
- Ebook 07 ReologiaDocumento4 páginasEbook 07 ReologiaBianca PeradellesAinda não há avaliações
- Palestra 5 Elementos de Economia e GestaoDocumento12 páginasPalestra 5 Elementos de Economia e GestaoApvs WamaritaAinda não há avaliações
- Apostila Matematica - GEOMETRIA ANALÍTICA Circunferencia CassioDocumento30 páginasApostila Matematica - GEOMETRIA ANALÍTICA Circunferencia CassioIgorAinda não há avaliações
- Plano de Acao PEIDocumento6 páginasPlano de Acao PEILuiz Fabiano BonettiAinda não há avaliações
- PRE29006 Lista 3Documento6 páginasPRE29006 Lista 3Junior MxAinda não há avaliações
- Aula 02 Equivalencia Lógica e 1 e 2 Lei de Morgan..Documento37 páginasAula 02 Equivalencia Lógica e 1 e 2 Lei de Morgan..Marcelo Cardoso100% (2)
- Ficha n1Documento5 páginasFicha n1Carlos CamposAinda não há avaliações
- Apostila Elite LançamentosDocumento15 páginasApostila Elite LançamentoslagostinhaAinda não há avaliações
- Aval - Diag.mat 6ºano.2022Documento4 páginasAval - Diag.mat 6ºano.2022Jacky RiquielmeAinda não há avaliações
- Exercicios de Volume Nono AnoDocumento39 páginasExercicios de Volume Nono AnoMarly AraújoAinda não há avaliações
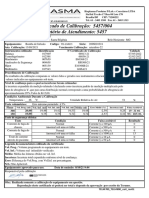
- Certificado de Calibração: 5457/004 Relatório de Atendimento: 5457Documento1 páginaCertificado de Calibração: 5457/004 Relatório de Atendimento: 5457Engenharia Clínica HC-UFMGAinda não há avaliações
- Relatorio 1 Portas LogicasDocumento18 páginasRelatorio 1 Portas LogicasAquilasAinda não há avaliações
- Estruturação de Sentenças em LibrasDocumento5 páginasEstruturação de Sentenças em LibrasDaniela Monteiro0% (1)
- A Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema LinearDocumento16 páginasA Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema Linearanon-507802100% (5)
- ÂngulosDocumento9 páginasÂngulosanimeg2a0Ainda não há avaliações
- Lista Exercícios Teorema de PitágorasDocumento1 páginaLista Exercícios Teorema de PitágorasBeatrizAinda não há avaliações
- Instrumentação para o Ensino Da QuímicaDocumento61 páginasInstrumentação para o Ensino Da QuímicaEdsonFerreiraAinda não há avaliações
- 2Documento10 páginas2Rafael PaivaAinda não há avaliações
- Aula de Conforto TérmicoDocumento47 páginasAula de Conforto TérmicoEduardo RibaslarAinda não há avaliações
- Apostila DraftSight Comandos de Desenho e ModificaçãoDocumento17 páginasApostila DraftSight Comandos de Desenho e ModificaçãoAlexandre FernandesAinda não há avaliações
- Analise1 Lista 1Documento4 páginasAnalise1 Lista 1Amanda PerinAinda não há avaliações
- Artigo Sobre Norma API 579 - Consulta ImportanteDocumento25 páginasArtigo Sobre Norma API 579 - Consulta ImportanteElidene LavaredaAinda não há avaliações
- Trilha de MatemáticaDocumento2 páginasTrilha de Matemáticaerlon dantas da nobrega100% (1)
- Lista de ExerciciosDocumento2 páginasLista de ExerciciosRicardo MatosAinda não há avaliações
- Revisa Goiás 3 Mat MaioDocumento94 páginasRevisa Goiás 3 Mat MaioJorge Lucas100% (1)
- Especificacao Accu Chek ComboDocumento8 páginasEspecificacao Accu Chek ComboCassiano Ricardo GeromelAinda não há avaliações
- Resistência Dos Materiais Resistência Dos Materiais: Deflexão de Vigas Por IntegraçãoDocumento9 páginasResistência Dos Materiais Resistência Dos Materiais: Deflexão de Vigas Por IntegraçãoFrenzy BritoAinda não há avaliações