Você também pode gostar
- Controle I - Lista IIIDocumento2 páginasControle I - Lista IIIStenio CoelhoAinda não há avaliações
- 09 Lugar Das Raízes 01Documento4 páginas09 Lugar Das Raízes 01Arthur LealAinda não há avaliações
- Lista 2Documento6 páginasLista 2luis volpeAinda não há avaliações
- Elc418 Exer 5Documento15 páginasElc418 Exer 5Raquel Bezerra SAinda não há avaliações
- Lista 1Documento7 páginasLista 1Tiago Rodrigues MendonçaAinda não há avaliações
- CeSIII2010-2 Exercicios Sugeridos CeSDocumento8 páginasCeSIII2010-2 Exercicios Sugeridos CeSNilzete Cardoso100% (1)
- 2 - Modelos Matemáticos de Sistemas de ControleDocumento28 páginas2 - Modelos Matemáticos de Sistemas de ControleHenrique LimaAinda não há avaliações
- Lista 1Documento4 páginasLista 1maurilio paiaoAinda não há avaliações
- Lista 3Documento6 páginasLista 3annaceciliaassisAinda não há avaliações
- DSL 20201 L2Documento3 páginasDSL 20201 L2Mariana MoreiraAinda não há avaliações
- pc2 01jul2015gabDocumento7 páginaspc2 01jul2015gabLUIZ BONFA DOS SANTOSAinda não há avaliações
- 2a Lista Controle IDocumento6 páginas2a Lista Controle IWilson LimaAinda não há avaliações
- Eng Eletronica 2010Documento12 páginasEng Eletronica 2010Marcelo LaurianoAinda não há avaliações
- Provas Mestrado UFRNDocumento9 páginasProvas Mestrado UFRNDiego SouzaAinda não há avaliações
- Lista 1 - Sistemas de ControleDocumento6 páginasLista 1 - Sistemas de ControleDionizioAinda não há avaliações
- Sistema de ControleDocumento10 páginasSistema de ControleMarcio Mian0% (1)
- Lista de Exercícios de Revisão de Modelagem (2015.2) 702982Documento4 páginasLista de Exercícios de Revisão de Modelagem (2015.2) 702982Sergio SachtAinda não há avaliações
- Lista 4Documento2 páginasLista 4Pedro MartinsAinda não há avaliações
- Lista 02 - 2Documento2 páginasLista 02 - 2Abel HenriqueAinda não há avaliações
- Apendice U3Documento9 páginasApendice U3Vinicius MorimAinda não há avaliações
- Relatorio de Controle - Funções de TransferênciaDocumento38 páginasRelatorio de Controle - Funções de TransferênciaLuis AraujoAinda não há avaliações
- EngenhariadeControle ListaDeExerciciosDocumento23 páginasEngenhariadeControle ListaDeExerciciosEmilly CarvalhoAinda não há avaliações
- Experiencia5 V2006Documento13 páginasExperiencia5 V2006poncianonetoAinda não há avaliações
- TRABALHOFINALpdfDocumento27 páginasTRABALHOFINALpdfLAYDETCAinda não há avaliações
- Lista de Sistemas de Controle IIDocumento9 páginasLista de Sistemas de Controle IIfelipesineiderAinda não há avaliações
- MetFisCom MecQuantica Aula24 Sist2Niveis 2020Documento12 páginasMetFisCom MecQuantica Aula24 Sist2Niveis 2020Lane LopesAinda não há avaliações
- Lista 2 - 2018Documento5 páginasLista 2 - 2018Alessandro JesusAinda não há avaliações
- Exercícios Antes P1 - Sistemas de ControleDocumento2 páginasExercícios Antes P1 - Sistemas de ControlechikincvoAinda não há avaliações
- Questoes Prova SistemasDocumento10 páginasQuestoes Prova SistemasShawn RamseyAinda não há avaliações
- Notas de Aula Da Unidade II PDFDocumento39 páginasNotas de Aula Da Unidade II PDFRhaian BarrosAinda não há avaliações
- Av3 2020 2Documento2 páginasAv3 2020 2Bio HueAinda não há avaliações
- Lista 2 V2014Documento8 páginasLista 2 V2014rogerio nascimentoAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Prova - ServomecanismoDocumento7 páginasProva - ServomecanismoCamila Marques CoutoAinda não há avaliações
- Prova 1Documento3 páginasProva 1Igor PontesAinda não há avaliações
- Lista Exercicios LRDocumento3 páginasLista Exercicios LRGustavo VianaAinda não há avaliações
- Exp 9 LGR 1Documento4 páginasExp 9 LGR 1Mk DuarteAinda não há avaliações
- MCPF ParteA Freq2NOV2020Documento3 páginasMCPF ParteA Freq2NOV2020brunonaruto03Ainda não há avaliações
- Controle LinearDocumento111 páginasControle LinearLeonardo Sirtoli0% (1)
- Lista de Exercícios - UnidadeIIIDocumento12 páginasLista de Exercícios - UnidadeIIICarlos LimaAinda não há avaliações
- 2016.06.14 (Rep) - Enunciado + SoluçãoDocumento3 páginas2016.06.14 (Rep) - Enunciado + Soluçãobrunocor49Ainda não há avaliações
- Parte2 RespostaFrequencia ExerciciosDocumento2 páginasParte2 RespostaFrequencia ExerciciosFrancisco RodriguesAinda não há avaliações
- Exercícios Preparatórios para Avaliação 1Documento9 páginasExercícios Preparatórios para Avaliação 1Giu InêsAinda não há avaliações
- P1 Discreto - USPDocumento46 páginasP1 Discreto - USPedson.luis.silveiraAinda não há avaliações
- Sistemas de Controle 10Documento3 páginasSistemas de Controle 10jose.martinsAinda não há avaliações
- Exercícios Controle e ServomecanismosDocumento4 páginasExercícios Controle e ServomecanismosHugo FusinatoAinda não há avaliações
- 222Documento4 páginas222BrunoAinda não há avaliações
- Lista Exercicios 01Documento4 páginasLista Exercicios 01BrunoAinda não há avaliações
- Rova EsoluçãoDocumento4 páginasRova Esolução05606908190Ainda não há avaliações
- 2o Trabalho Controle, Amaro e Pedro FazzaDocumento13 páginas2o Trabalho Controle, Amaro e Pedro FazzaAmaro Da Silva Lopes JúniorAinda não há avaliações
- Função de TransferênciaDocumento27 páginasFunção de TransferênciaAllan GumesAinda não há avaliações
- Aula 14 Aula Pratica 02 ESTA008 17 v1Documento8 páginasAula 14 Aula Pratica 02 ESTA008 17 v1caAinda não há avaliações
- Lista de Exercícios Aulas 4 e 5 6Documento4 páginasLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiAinda não há avaliações
- Lista Exercicio CompletaDocumento17 páginasLista Exercicio CompletaVinícius Moreira SouzaAinda não há avaliações
- Controlo Automático de Sistemas (CAS) Exames de 2013 - 2014Documento7 páginasControlo Automático de Sistemas (CAS) Exames de 2013 - 2014Pedro SaraivaAinda não há avaliações
- List BlocosDocumento2 páginasList BlocosmgteslaAinda não há avaliações
- Prova 1 SCI 2021 1SDocumento7 páginasProva 1 SCI 2021 1SROBERTH HENRIQUE GUIMARAES DOS SANTOSAinda não há avaliações
- Slebf 20082009 ErDocumento1 páginaSlebf 20082009 ErHelder RamiresAinda não há avaliações
- PMR2360 Lista1 V2014Documento4 páginasPMR2360 Lista1 V2014Railane OliveiraAinda não há avaliações
- Aula de Revisão IiDocumento29 páginasAula de Revisão IiJessica Cristina PereiraAinda não há avaliações
- Lista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Documento2 páginasLista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Melo JoseAinda não há avaliações
- Lista de ExercíciosDocumento2 páginasLista de ExercíciosmileknzAinda não há avaliações
- Glossário MACS 11Documento3 páginasGlossário MACS 11RúbenAinda não há avaliações
- Lista 2 Indução MatematicaDocumento2 páginasLista 2 Indução MatematicaIgor MartinsAinda não há avaliações
- Teste Do Capítulo 4 - Revisão Da TentativaDocumento7 páginasTeste Do Capítulo 4 - Revisão Da TentativaFernando Totoli Ferreira100% (1)
- Ed - Grafosgrafos EstruDocumento6 páginasEd - Grafosgrafos EstruJoãoNetoAinda não há avaliações
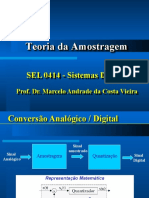
- Aula 20 - Teoria Da Amostragem PDFDocumento15 páginasAula 20 - Teoria Da Amostragem PDFMarcos NobreAinda não há avaliações
- Cap 2 - Resolucao de Problemas Por Meio de BuscasDocumento20 páginasCap 2 - Resolucao de Problemas Por Meio de BuscascarlosAinda não há avaliações
- Disciplinas PPG MATDocumento4 páginasDisciplinas PPG MATMauricio Oliverira do Nascimento nascimentoAinda não há avaliações
- Linguagens Formais, Autômatos e Compiladores - Aula 1Documento66 páginasLinguagens Formais, Autômatos e Compiladores - Aula 1Pedro Lucas Teixeira DiasAinda não há avaliações
- Implementação de Otimização Colônia de Formigas PDFDocumento14 páginasImplementação de Otimização Colônia de Formigas PDFSenhor MAinda não há avaliações
- Codificação Da Fonte e de CanalDocumento26 páginasCodificação Da Fonte e de CanalHenrique BeloAinda não há avaliações
- Método de Eliminação GaussianaDocumento5 páginasMétodo de Eliminação GaussianaEvelyn Micheli KleinAinda não há avaliações
- Aula 5 - EconometriaDocumento27 páginasAula 5 - EconometriaAlejandro Pulgarin CueroAinda não há avaliações
- Prova Tentativa 3Documento5 páginasProva Tentativa 3Hallen Lopes Aires100% (1)
- Conceitos E: Aprendizado ProfundoDocumento161 páginasConceitos E: Aprendizado Profundojairo silveiraAinda não há avaliações
- Programação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLDocumento8 páginasProgramação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLpereiramcfAinda não há avaliações
- Lista 4 Máquinas Térmicas e A Segunda Lei Da TermodinâmicaDocumento13 páginasLista 4 Máquinas Térmicas e A Segunda Lei Da Termodinâmicasatoru4nishidaAinda não há avaliações
- Apostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Documento145 páginasApostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Allan MoreiraAinda não há avaliações
- Lista15 2017 1 Cauchy EulerDocumento2 páginasLista15 2017 1 Cauchy EulerHeitor LucenaAinda não há avaliações
- Artigo ComplexidadeDocumento125 páginasArtigo ComplexidadeHelio FilhoAinda não há avaliações
- Lista-Transformação LinearDocumento2 páginasLista-Transformação LinearLuísAinda não há avaliações
- Equacoes 1ograu Ficha1Documento4 páginasEquacoes 1ograu Ficha1Carla SantosAinda não há avaliações
- Metodo Simplex Simples e CompletoDocumento8 páginasMetodo Simplex Simples e CompletoTomas MarceloAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Fundamentos de Cinemática e Dinâmica de MecanismosNo EverandFundamentos de Cinemática e Dinâmica de MecanismosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- A Aprendizagem Cooperativa no Ensino da MatemáticaNo EverandA Aprendizagem Cooperativa no Ensino da MatemáticaNota: 5 de 5 estrelas5/5 (1)
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações
- Contabilidade Geral Para O Exame De SuficiênciaNo EverandContabilidade Geral Para O Exame De SuficiênciaAinda não há avaliações
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações