Você também pode gostar
- Questoes Prova SistemasDocumento10 páginasQuestoes Prova SistemasShawn RamseyAinda não há avaliações
- Lista 1Documento3 páginasLista 1luis volpeAinda não há avaliações
- Lista de Exercícios - UnidadeIIIDocumento12 páginasLista de Exercícios - UnidadeIIICarlos LimaAinda não há avaliações
- Relatorio de Controle - Funções de TransferênciaDocumento38 páginasRelatorio de Controle - Funções de TransferênciaLuis AraujoAinda não há avaliações
- ÁLGEBRA LINEAR Prova PresencialDocumento3 páginasÁLGEBRA LINEAR Prova PresencialClayton MouraAinda não há avaliações
- Trabalho de Modelagem de Sistemas PDFDocumento7 páginasTrabalho de Modelagem de Sistemas PDFViniciusAinda não há avaliações
- Os Modelos Matemáticos TípicosDocumento33 páginasOs Modelos Matemáticos TípicosSamuel Silva50% (2)
- Lista Exercicio CompletaDocumento17 páginasLista Exercicio CompletaVinícius Moreira SouzaAinda não há avaliações
- Lista Cal Num-Ajuste - CurvaDocumento18 páginasLista Cal Num-Ajuste - CurvaIsabel JohannAinda não há avaliações
- Sistema de ControleDocumento10 páginasSistema de ControleMarcio Mian0% (1)
- EngenhariadeControle ListaDeExerciciosDocumento23 páginasEngenhariadeControle ListaDeExerciciosEmilly CarvalhoAinda não há avaliações
- Lista de Exercícios Aulas 4 e 5 6Documento4 páginasLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiAinda não há avaliações
- Diagrama de Blocos e Função de Transferência: Modelagem de Sistemas DinâmicosDocumento24 páginasDiagrama de Blocos e Função de Transferência: Modelagem de Sistemas DinâmicosLuiz Filipe SantosAinda não há avaliações
- Aula 8Documento20 páginasAula 8Ana Beatriz BrazAinda não há avaliações
- Função de TransferênciaDocumento27 páginasFunção de TransferênciaAllan GumesAinda não há avaliações
- RES Teste2MIEI A19dezDocumento4 páginasRES Teste2MIEI A19deztiago2003figueiredoAinda não há avaliações
- Prova 2 AlgebraDocumento4 páginasProva 2 AlgebraRaphael AraujoAinda não há avaliações
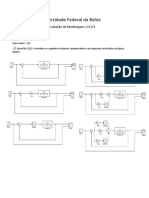
- Lista de Exercícios de Revisão de Modelagem (2015.2) 702982Documento4 páginasLista de Exercícios de Revisão de Modelagem (2015.2) 702982Sergio SachtAinda não há avaliações
- Aol 1 EnviadaDocumento8 páginasAol 1 EnviadaC.Henrique LAinda não há avaliações
- Calculo Diferencial 1Documento12 páginasCalculo Diferencial 1Herryson FelipeAinda não há avaliações
- Prova - ServomecanismoDocumento7 páginasProva - ServomecanismoCamila Marques CoutoAinda não há avaliações
- 2° Prova Modelagem 2023 - 1Documento4 páginas2° Prova Modelagem 2023 - 1Prof. Eduardo NunesAinda não há avaliações
- Exercícios de Fixação - MOD, SIM, OTMDocumento13 páginasExercícios de Fixação - MOD, SIM, OTMGabriela OliverAinda não há avaliações
- Prova 3º AnoDocumento4 páginasProva 3º AnoRosanaAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Geometria AnaliticaDocumento2 páginasGeometria AnaliticaAmanda MiquiliniAinda não há avaliações
- DSL 20201 L2Documento3 páginasDSL 20201 L2Mariana MoreiraAinda não há avaliações
- Aeronautica 2011 Ciaar Primeiro Tenente Engenharia Eletronica ProvaDocumento26 páginasAeronautica 2011 Ciaar Primeiro Tenente Engenharia Eletronica ProvaTedson MarcosAinda não há avaliações
- Lista 01Documento12 páginasLista 01SeverinoSalesAinda não há avaliações
- Lista3 - MAT 137 - 2013-IIDocumento7 páginasLista3 - MAT 137 - 2013-IICamila Sá TelesAinda não há avaliações
- Análise de Sistemas Físicos Usando Transformada de LaplaceDocumento3 páginasAnálise de Sistemas Físicos Usando Transformada de LaplaceCarlosAvlisAinda não há avaliações
- Modelação e Simulação: V - de Forma Simplificada, Um Altifalante Consiste NumaDocumento5 páginasModelação e Simulação: V - de Forma Simplificada, Um Altifalante Consiste NumaFrancisco RosaAinda não há avaliações
- Lista Exercicio 2Documento3 páginasLista Exercicio 2Ítalo MantegaAinda não há avaliações
- Simulado 2Documento11 páginasSimulado 2junior freitas tavaresAinda não há avaliações
- Recurso ALGAN LEI 1516Documento2 páginasRecurso ALGAN LEI 1516Hugo FreitasAinda não há avaliações
- Ita Mat 72Documento3 páginasIta Mat 72Luiz Fernando Botelho TrindadeAinda não há avaliações
- Lista 43 ControleDocumento8 páginasLista 43 ControleMatheus AganeteAinda não há avaliações
- Controle Analógico - Lista - de - Exercicios - IDocumento7 páginasControle Analógico - Lista - de - Exercicios - IClemilson MirelesAinda não há avaliações
- 2a Lista Controle IDocumento6 páginas2a Lista Controle IWilson LimaAinda não há avaliações
- Atividade AvaliativaDocumento7 páginasAtividade AvaliativaRingo silverAinda não há avaliações
- Gabarito Lista de Controle ResolvidaDocumento10 páginasGabarito Lista de Controle ResolvidaSalatyel FellipeAinda não há avaliações
- Exerci Cio S Rev IsaoDocumento2 páginasExerci Cio S Rev IsaoHigor BortoliniAinda não há avaliações
- T6 Guilherme-BenevidesDocumento5 páginasT6 Guilherme-BenevidesGuilherme BenevidesAinda não há avaliações
- Lista01 Exercicios-RESOLVIDADocumento7 páginasLista01 Exercicios-RESOLVIDAgustavokleinAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Lista 2Documento6 páginasLista 2luis volpeAinda não há avaliações
- Álgebra Linear II - P3 - 2012Documento8 páginasÁlgebra Linear II - P3 - 2012nunes14Ainda não há avaliações
- Exercícios ResolvidosDocumento10 páginasExercícios ResolvidosfabianoAinda não há avaliações
- Exercícios Controle e ServomecanismosDocumento4 páginasExercícios Controle e ServomecanismosHugo FusinatoAinda não há avaliações
- Cálculo Com Geometria AnalíticaDocumento20 páginasCálculo Com Geometria AnalíticaHusney MacielAinda não há avaliações
- Lista 1Documento10 páginasLista 1Davi JordãoAinda não há avaliações
- TRABALHOFINALpdfDocumento27 páginasTRABALHOFINALpdfLAYDETCAinda não há avaliações
- Lista 5Documento5 páginasLista 5Gabriel Rodrigues CezarAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Cobranca Fio BDocumento3 páginasCobranca Fio BDiego SouzaAinda não há avaliações
- Edital #2453 - Convocação Temporária HUOL-UFRNDocumento1 páginaEdital #2453 - Convocação Temporária HUOL-UFRNDiego SouzaAinda não há avaliações
- EDITAL N° 2179 - Concurso 01-2019 - Nacional - HE-UFPELDocumento1 páginaEDITAL N° 2179 - Concurso 01-2019 - Nacional - HE-UFPELDiego SouzaAinda não há avaliações
- Aluno Marilourdes Silva CLP PDFDocumento7 páginasAluno Marilourdes Silva CLP PDFDiego SouzaAinda não há avaliações
- WEG Controladores Logicos Programaveis Clps 10413124 Catalogo Portugues BRDocumento28 páginasWEG Controladores Logicos Programaveis Clps 10413124 Catalogo Portugues BRmn743Ainda não há avaliações
- CCAexerResolvidos VIIDocumento9 páginasCCAexerResolvidos VIIDiego SouzaAinda não há avaliações
- WEG Cfw700 Manual Do Usuario 10000771684 Manual Portugues BRDocumento38 páginasWEG Cfw700 Manual Do Usuario 10000771684 Manual Portugues BRDiego SouzaAinda não há avaliações
- MANÔMETRIADocumento18 páginasMANÔMETRIADiego SouzaAinda não há avaliações
- NHB - Locomoção e Mecânica CorporalDocumento41 páginasNHB - Locomoção e Mecânica CorporalADELAIDE DO SOCORRO DIAS BAIAAinda não há avaliações
- Declaração de DeficienciaDocumento3 páginasDeclaração de DeficienciaAldo SilvaAinda não há avaliações
- Gesso AcartonadoDocumento50 páginasGesso AcartonadoHéglison MarquesAinda não há avaliações
- ND.26 - Fornecimento de Energia A Edificio de Uso Coletivo e Medicao AgrupadaDocumento119 páginasND.26 - Fornecimento de Energia A Edificio de Uso Coletivo e Medicao AgrupadaEduardo Martins50% (2)
- Haletos OrgânicosDocumento15 páginasHaletos OrgânicoswillbestenAinda não há avaliações
- Os Recursos Naturais e o HomemDocumento382 páginasOs Recursos Naturais e o Homemus3ki6zch7100% (1)
- 10.º SantillanaDocumento13 páginas10.º SantillanaOrlando MeirelesAinda não há avaliações
- ABS ApostilaDocumento6 páginasABS ApostilaDouglas GobbiAinda não há avaliações
- Led PiscaDocumento2 páginasLed PiscakalainneAinda não há avaliações
- Cap 5Documento10 páginasCap 5adeiltonmoreiraAinda não há avaliações
- Resumo Capitulo II - MORFOLOGIA URBANA E O DESENHO DA CIDADEDocumento5 páginasResumo Capitulo II - MORFOLOGIA URBANA E O DESENHO DA CIDADEKamila Lagomarsino100% (1)
- É Possível Fazer Aeração em Dia de ChuvaDocumento5 páginasÉ Possível Fazer Aeração em Dia de ChuvaDavid Tanamura Tanamura100% (1)
- Registos Qualificação de SoldaduraDocumento3 páginasRegistos Qualificação de SoldaduraAMGConsultadoria0% (1)
- P2-Quimico Produtos PerigososDocumento16 páginasP2-Quimico Produtos PerigososHugo RidaoAinda não há avaliações
- Estática Dos FluidosDocumento17 páginasEstática Dos FluidosJohnatas MathewsAinda não há avaliações
- Ensaio PressiômetroDocumento8 páginasEnsaio PressiômetrosauloaovianaAinda não há avaliações
- Manual Captiva 2011Documento214 páginasManual Captiva 2011Infoprime Charqueadas33% (3)
- Estruturas de Aço e Madeira - Aula 1-1 PDFDocumento70 páginasEstruturas de Aço e Madeira - Aula 1-1 PDFdehevyAinda não há avaliações
- Batedeira Planetária Eletrônica 5 Litros BPEL-05 - Braesi ManualDocumento8 páginasBatedeira Planetária Eletrônica 5 Litros BPEL-05 - Braesi ManualIvan Rodrigues de MoraesAinda não há avaliações
- Materiais Protetores para Materiais DentáriosDocumento52 páginasMateriais Protetores para Materiais Dentáriosgrazielagalhano100% (4)
- Protese Dental ResumoDocumento19 páginasProtese Dental ResumoMarianaFrancoAinda não há avaliações
- Apostila Ajustagem10 PDFDocumento46 páginasApostila Ajustagem10 PDFThiago HermesAinda não há avaliações
- Pre SocraticosDocumento1 páginaPre SocraticosEliana PazAinda não há avaliações
- 21 Dicas para Tornar o Estudo Mais Eficiente PDFDocumento29 páginas21 Dicas para Tornar o Estudo Mais Eficiente PDFContato BazarhAinda não há avaliações
- Síntese de Adutos Entre CobreDocumento7 páginasSíntese de Adutos Entre CobreMayra FonsecaAinda não há avaliações
- Saiba Como É Feita A Instalação de Um Elevador de CremalheiraDocumento22 páginasSaiba Como É Feita A Instalação de Um Elevador de CremalheiraKleber Marcelo Carvalho100% (1)
- Algumas Experiências Simples Envolvendo o Princípio de Le ChatelierDocumento4 páginasAlgumas Experiências Simples Envolvendo o Princípio de Le ChatelierFranklin Kaic100% (1)
- Muro Reforçado Com Geossintético PDFDocumento81 páginasMuro Reforçado Com Geossintético PDFThiago Pires Sampaio0% (1)
- 1.introdução BJTDocumento21 páginas1.introdução BJTdarkiolourencoAinda não há avaliações
- Lista 1Documento3 páginasLista 1Nicole MariaAinda não há avaliações