Você também pode gostar
- Função de Transferência do Modelo de Insulina GlargineDocumento12 páginasFunção de Transferência do Modelo de Insulina GlargineCarlos LimaAinda não há avaliações
- Lista 1Documento3 páginasLista 1luis volpeAinda não há avaliações
- DSL 20201 L2Documento3 páginasDSL 20201 L2Mariana MoreiraAinda não há avaliações
- Provas Mestrado UFRNDocumento9 páginasProvas Mestrado UFRNDiego SouzaAinda não há avaliações
- Funções de Transferência em Sistemas de ControleDocumento38 páginasFunções de Transferência em Sistemas de ControleLuis AraujoAinda não há avaliações
- Modelagem matemática de sistemas de controleDocumento28 páginasModelagem matemática de sistemas de controleHenrique LimaAinda não há avaliações
- 3-Controle-I-Função de Transferência e Diagrama de Blocos PDFDocumento41 páginas3-Controle-I-Função de Transferência e Diagrama de Blocos PDFLucas Nunes100% (1)
- CeSIII2010-2 Exercicios Sugeridos CeSDocumento8 páginasCeSIII2010-2 Exercicios Sugeridos CeSNilzete Cardoso100% (1)
- Função de TransferênciaDocumento27 páginasFunção de TransferênciaAllan GumesAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Lista 2Documento12 páginasLista 2DokScyAinda não há avaliações
- Modelos Matem - Ticos de Sistemas de ControleDocumento36 páginasModelos Matem - Ticos de Sistemas de ControleSamuel GamonalAinda não há avaliações
- Instrumentação e Controle 4e5 IntensivoDocumento93 páginasInstrumentação e Controle 4e5 IntensivoGabriel BruschiAinda não há avaliações
- Controle Automático: Aula 2 - 1Documento64 páginasControle Automático: Aula 2 - 1Leo WilliamAinda não há avaliações
- Aula #12-Diagrama em Blocos-1Documento27 páginasAula #12-Diagrama em Blocos-1fernandoAinda não há avaliações
- Módulo 8 - Função de Transferência e Diagrama de BodeDocumento36 páginasMódulo 8 - Função de Transferência e Diagrama de Bodesolteirailudida2Ainda não há avaliações
- Função de transferência em sistemas com realimentaçãoDocumento10 páginasFunção de transferência em sistemas com realimentaçãoGabby GabrielAinda não há avaliações
- TRABALHOFINALpdfDocumento27 páginasTRABALHOFINALpdfLAYDETCAinda não há avaliações
- Lista 3Documento6 páginasLista 3annaceciliaassisAinda não há avaliações
- Implementação Digital de Controladores PIDDocumento13 páginasImplementação Digital de Controladores PIDponcianonetoAinda não há avaliações
- Função Seno e CossenoDocumento5 páginasFunção Seno e CossenonatanportodiasAinda não há avaliações
- Ajuste de curva e regressão numéricaDocumento18 páginasAjuste de curva e regressão numéricaIsabel JohannAinda não há avaliações
- Aula Teórica 2 Sistemas DinâmicosDocumento43 páginasAula Teórica 2 Sistemas DinâmicosLeo WilliamAinda não há avaliações
- Lista de Sistemas de Controle IIDocumento9 páginasLista de Sistemas de Controle IIfelipesineiderAinda não há avaliações
- Lista 2Documento6 páginasLista 2luis volpeAinda não há avaliações
- Controle1_Técnicas de resposta em frequênciaDocumento32 páginasControle1_Técnicas de resposta em frequênciatressoengenhariaAinda não há avaliações
- 10 ClasseDocumento7 páginas10 ClasseFilimone Thumbo100% (2)
- Exercícios Controle e ServomecanismosDocumento4 páginasExercícios Controle e ServomecanismosHugo FusinatoAinda não há avaliações
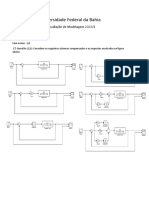
- 2° Prova Modelagem 2023 - 1Documento4 páginas2° Prova Modelagem 2023 - 1Prof. Eduardo NunesAinda não há avaliações
- Exercícios para Realizar No Dia 19-06Documento2 páginasExercícios para Realizar No Dia 19-06jão silvestre da cunhaAinda não há avaliações
- Lista 01Documento12 páginasLista 01SeverinoSalesAinda não há avaliações
- Modelagem de Filtro Passa-Alta de Segunda OrdemDocumento3 páginasModelagem de Filtro Passa-Alta de Segunda OrdemRODRIGO EMANUEL BORGESAinda não há avaliações
- Aula7 Matlab Tpicos 2 3Documento67 páginasAula7 Matlab Tpicos 2 3silvaAinda não há avaliações
- 10-Realimentação de EstadosDocumento88 páginas10-Realimentação de EstadosDavid de Almeida FiorilloAinda não há avaliações
- Control Aula11 FB Servo-Regulatorio 1sem2017Documento25 páginasControl Aula11 FB Servo-Regulatorio 1sem2017jhonyAinda não há avaliações
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 páginas5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasAinda não há avaliações
- Modelagem de sistemas analógicosDocumento45 páginasModelagem de sistemas analógicosLeo WilliamAinda não há avaliações
- Lista 2 - 2018Documento5 páginasLista 2 - 2018Alessandro JesusAinda não há avaliações
- Diagrama de Bode: análise da resposta em frequência de sistemas linearesDocumento11 páginasDiagrama de Bode: análise da resposta em frequência de sistemas linearesAlan de MeloAinda não há avaliações
- 5 EXERCÍCIOS DE CONTROLEDocumento15 páginas5 EXERCÍCIOS DE CONTROLERaquel Bezerra SAinda não há avaliações
- Apostila de FunçõesDocumento9 páginasApostila de FunçõesGabriel ResendeAinda não há avaliações
- Lista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFDocumento3 páginasLista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFNatercia Miranda100% (1)
- Lab 00Documento31 páginasLab 00Luiz Fernando Florentino TrevisanAinda não há avaliações
- Orientações e Exercícios - Cálculo IV - 1a Parte-2017Documento15 páginasOrientações e Exercícios - Cálculo IV - 1a Parte-2017Frederico Reis Marques de BritoAinda não há avaliações
- Control Aula11 FB Servo-RegulatorioDocumento14 páginasControl Aula11 FB Servo-RegulatorioLuiz RoqueAinda não há avaliações
- Parte2 RespostaFrequencia ExerciciosDocumento2 páginasParte2 RespostaFrequencia ExerciciosFrancisco RodriguesAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- Sistemas de Controle II - Lista de Exercícios IDocumento4 páginasSistemas de Controle II - Lista de Exercícios IBrunoAinda não há avaliações
- Lista1 (1)Documento7 páginasLista1 (1)Tiago Rodrigues MendonçaAinda não há avaliações
- Funções exponenciais e logaritmicasDocumento6 páginasFunções exponenciais e logaritmicasFabio A. SantosAinda não há avaliações
- Sistema de ControleDocumento10 páginasSistema de ControleMarcio Mian0% (1)
- 222Documento4 páginas222BrunoAinda não há avaliações
- Sistemas de controle e transformada de LaplaceDocumento6 páginasSistemas de controle e transformada de Laplacelorentz franklinAinda não há avaliações
- Lista de Exercícios Aulas 4 e 5 6Documento4 páginasLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiAinda não há avaliações
- Transformada de Laplace: Propriedades, Funções de Transferência e Resposta de SistemasDocumento5 páginasTransformada de Laplace: Propriedades, Funções de Transferência e Resposta de SistemasGabriel MazzoniAinda não há avaliações
- T1_V1_FQA11_ 24outubro_2022Documento6 páginasT1_V1_FQA11_ 24outubro_2022Catarina FerreiraAinda não há avaliações
- Trigonometria Funções Trigonométricas e Suas Inversas.Documento14 páginasTrigonometria Funções Trigonométricas e Suas Inversas.Fabio CristianoAinda não há avaliações
- Análise de Sistemas Lineares com Diagramas de BlocosDocumento43 páginasAnálise de Sistemas Lineares com Diagramas de BlocosJosemar ChavesAinda não há avaliações
- Sistemas Elétricos: ModelagemDocumento16 páginasSistemas Elétricos: ModelagemLuiz Filipe SantosAinda não há avaliações
- Preço x Vendas HistóricoDocumento2 páginasPreço x Vendas HistóricoLuiz Filipe SantosAinda não há avaliações
- Linearização de sistemas não linearesDocumento24 páginasLinearização de sistemas não linearesLuiz Filipe SantosAinda não há avaliações
- Sistemas mecânicos rotativosDocumento30 páginasSistemas mecânicos rotativosLuiz Filipe SantosAinda não há avaliações
- Sistemas Mecânicos de TranslaçãoDocumento15 páginasSistemas Mecânicos de TranslaçãoLuiz Filipe SantosAinda não há avaliações
- Modelagem de Sistemas Dinâmicos - Trabalho Final: Sistema 4Documento5 páginasModelagem de Sistemas Dinâmicos - Trabalho Final: Sistema 4Luiz Filipe SantosAinda não há avaliações
- DKG-705: Controlador de Grupos Geradores da KayamaDocumento1 páginaDKG-705: Controlador de Grupos Geradores da KayamaAlan OliveiraAinda não há avaliações
- Projeto de armação de vigaDocumento15 páginasProjeto de armação de vigaSuzanaSatieAbeCunhaAinda não há avaliações
- Manual Servicos Forno Gas OC4GM Rev00 Abril2022Documento46 páginasManual Servicos Forno Gas OC4GM Rev00 Abril2022Bebetinho de JesusAinda não há avaliações
- Memorial Descritivo Conexão A Rede Da CEMIG-DDocumento10 páginasMemorial Descritivo Conexão A Rede Da CEMIG-DLuís HenriqueAinda não há avaliações
- TD-9 PTDocumento77 páginasTD-9 PTnintendo64 gameAinda não há avaliações
- Planejamento Eletrônica PotênciaDocumento6 páginasPlanejamento Eletrônica PotênciaLuiz HenriqueAinda não há avaliações
- Fatores que afetam velocidades de Reações de Substituição NucleofílicaDocumento28 páginasFatores que afetam velocidades de Reações de Substituição NucleofílicaMarina LeiteAinda não há avaliações
- Procedimento Guiado: 1905 - UCM - Tensão de Fornecimento Do Sensor 5vref1 Fora de Al-CanceDocumento4 páginasProcedimento Guiado: 1905 - UCM - Tensão de Fornecimento Do Sensor 5vref1 Fora de Al-CanceMauricio SimonAinda não há avaliações
- Limpeza, Energização, Consagração, Programação e Coleta de CristaisDocumento8 páginasLimpeza, Energização, Consagração, Programação e Coleta de CristaisValcir HenriqueAinda não há avaliações
- FS6-800-ET-motoventilador CompativelDocumento1 páginaFS6-800-ET-motoventilador CompativelFernando Luz Dos SantosAinda não há avaliações
- Avaliação Interdisciplinar de Física 2 Noite - EjaDocumento2 páginasAvaliação Interdisciplinar de Física 2 Noite - Ejavagner3312Ainda não há avaliações
- Guiao de Correccao Do 1o Teste de FMT & LFMT - M - 2018Documento8 páginasGuiao de Correccao Do 1o Teste de FMT & LFMT - M - 2018luis cassimooAinda não há avaliações
- Válvula de diafragma para gás ultra-puroDocumento27 páginasVálvula de diafragma para gás ultra-puroJoão BaffiniAinda não há avaliações
- Prováveis Causas de Erros Na Preparação Dos Meios de CulturaDocumento3 páginasProváveis Causas de Erros Na Preparação Dos Meios de CulturaScribdTranslationsAinda não há avaliações
- SA - Manutenção Mecânica IndustrialDocumento26 páginasSA - Manutenção Mecânica Industrialgionni_scAinda não há avaliações
- Speedy: EsterilizadorDocumento18 páginasSpeedy: EsterilizadorHerbertAinda não há avaliações
- Lista de Exercícios - ColigativasDocumento4 páginasLista de Exercícios - Coligativasalexchacal100% (1)
- Propagação de Calor - 8º ANO - CALDEIRADocumento2 páginasPropagação de Calor - 8º ANO - CALDEIRAJuan100% (2)
- Obtenção de Iodo através da reação de KI e MnO2Documento4 páginasObtenção de Iodo através da reação de KI e MnO2Bruna BorgesAinda não há avaliações
- Manual Adegas Marco 201903 Site PDFDocumento34 páginasManual Adegas Marco 201903 Site PDFlgomes_spAinda não há avaliações
- Reutilização de Embalagens Acartonadas Tetra Pak© Sob Telhas de Fibrocimento para A Promoção de Conforto TérmicoDocumento67 páginasReutilização de Embalagens Acartonadas Tetra Pak© Sob Telhas de Fibrocimento para A Promoção de Conforto TérmicoVitor MargaridoAinda não há avaliações
- Manual Ciplak WEB V2Documento96 páginasManual Ciplak WEB V2jmariros7903Ainda não há avaliações
- Espaços Abertos em Edifícios CulturaisDocumento100 páginasEspaços Abertos em Edifícios CulturaisIsadora BassaniAinda não há avaliações
- RAVUR 350 HR Ficha TecnicaDocumento2 páginasRAVUR 350 HR Ficha TecnicaMuhammad UsmanAinda não há avaliações
- Análise Da ViabilidadeDocumento71 páginasAnálise Da ViabilidadeVitor DelgadoAinda não há avaliações
- Traga A Espanha para Perto Tocando CastanholasDocumento24 páginasTraga A Espanha para Perto Tocando CastanholasLialunaAinda não há avaliações
- NBR 10295 - Transformadores A SecoDocumento73 páginasNBR 10295 - Transformadores A SecoChaell MirandaAinda não há avaliações
- Ficha Global 1 - EspaçoDocumento6 páginasFicha Global 1 - EspaçoVera SusanaAinda não há avaliações
- Engenharia de Segurança de Tabalho Slide Sobre DEMOLIÇÃODocumento24 páginasEngenharia de Segurança de Tabalho Slide Sobre DEMOLIÇÃOJulio NormandeAinda não há avaliações
- GABProf Walter Tadeu GARetas Aula 222016Documento5 páginasGABProf Walter Tadeu GARetas Aula 222016LorenaAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)
- Indicadores Matemáticos Para Apostas Em FutebolNo EverandIndicadores Matemáticos Para Apostas Em FutebolAinda não há avaliações