Você também pode gostar
- 4 - Laboratório Controlador PD, PI e PIDDocumento13 páginas4 - Laboratório Controlador PD, PI e PIDmarcelAinda não há avaliações
- Controle Vetorial, Máquina De Indução E Métodos NuméricosNo EverandControle Vetorial, Máquina De Indução E Métodos NuméricosAinda não há avaliações
- Lab. Controle 2 - Hector FelixDocumento28 páginasLab. Controle 2 - Hector FelixHector FelixAinda não há avaliações
- Pratica6 SintoniaControladorPID XcosDocumento7 páginasPratica6 SintoniaControladorPID XcosFernando MiyazakiAinda não há avaliações
- Controlo PID Discreto: Métodos de Sintonização e ModificaçõesDocumento7 páginasControlo PID Discreto: Métodos de Sintonização e ModificaçõesRaniere LiraAinda não há avaliações
- Lendo A Temperatura De Um Termopar No Lcd Com O Max6675 Usando O Pic Programado No Xc8No EverandLendo A Temperatura De Um Termopar No Lcd Com O Max6675 Usando O Pic Programado No Xc8Ainda não há avaliações
- Projeto PID para sistema de controle de malha fechadaDocumento19 páginasProjeto PID para sistema de controle de malha fechadaMICHELLY CARVALHO DA SILVAAinda não há avaliações
- Como Tratar Diagrama de BodeDocumento16 páginasComo Tratar Diagrama de BodeDorival OliveiraAinda não há avaliações
- Trabalho 2 - Ganho CríticoDocumento4 páginasTrabalho 2 - Ganho CríticoMeury BiazattiAinda não há avaliações
- Relatório de Controle Discreto Método de Ziegler NicholsDocumento10 páginasRelatório de Controle Discreto Método de Ziegler NicholsDiego VinhaAinda não há avaliações
- Sintonia PID-integral Do Erro e Modelo InternoDocumento5 páginasSintonia PID-integral Do Erro e Modelo InternoRichard FrancioliAinda não há avaliações
- Projeto Controle Ii Dionei ArcaroDocumento10 páginasProjeto Controle Ii Dionei ArcaroDionei ArcaroAinda não há avaliações
- Preditor SmithDocumento26 páginasPreditor SmithRosemonica BezerraAinda não há avaliações
- Apostila - Modelagem de Sistemas Fisicos - Parte 04Documento8 páginasApostila - Modelagem de Sistemas Fisicos - Parte 04Anderson KumazawaAinda não há avaliações
- Controle PID: Teoria e Projeto de ControladoresDocumento29 páginasControle PID: Teoria e Projeto de ControladoresTiago BitencourtAinda não há avaliações
- PID Controle de SistemasDocumento2 páginasPID Controle de SistemasWILLIAN PATRICK DA SILVA RODRIGUESAinda não há avaliações
- Controle Discreto Relatório 2: Compensadores de Fase, PI e PIDDocumento33 páginasControle Discreto Relatório 2: Compensadores de Fase, PI e PIDjose luis huayanay villarAinda não há avaliações
- Projeto de Controlador Pid: (Disciplina de Controle e Automação)Documento25 páginasProjeto de Controlador Pid: (Disciplina de Controle e Automação)Kevin AugustoAinda não há avaliações
- Apostila Controle - 21 - Avanço e AtrasoDocumento32 páginasApostila Controle - 21 - Avanço e Atrasolnery_1Ainda não há avaliações
- Projeto de controle de posição de motor CC usando PID digitalDocumento17 páginasProjeto de controle de posição de motor CC usando PID digitalvanessacavalcantiiAinda não há avaliações
- Controladores PIDDocumento26 páginasControladores PIDRejane BarbosaAinda não há avaliações
- Compensadores de ControleDocumento14 páginasCompensadores de ControleDorival OliveiraAinda não há avaliações
- Lista de Exercícios Aulas 9Documento1 páginaLista de Exercícios Aulas 9Luis Henrique FiorotiAinda não há avaliações
- Relatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento20 páginasRelatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. ZucatelliAinda não há avaliações
- Controlador por realimentação de estado de modo para planta (bs+c)(ds+eDocumento11 páginasControlador por realimentação de estado de modo para planta (bs+c)(ds+ePauloAinda não há avaliações
- Laboratório de Sistemas de Controle 2 - Relatório 4Documento12 páginasLaboratório de Sistemas de Controle 2 - Relatório 4Daniel P.Ainda não há avaliações
- Implementação de controlador PID direto no plano z usando ArduinoDocumento9 páginasImplementação de controlador PID direto no plano z usando ArduinoDiego VinhaAinda não há avaliações
- Sistemas de Controle II - CompensadoresDocumento128 páginasSistemas de Controle II - CompensadoresGiovanna MisquitaAinda não há avaliações
- Exercicio+de+controle-+lista+1 2014Documento5 páginasExercicio+de+controle-+lista+1 2014Flávia MartinsAinda não há avaliações
- Circuitos RL e RC: simulações e análise de constantes de tempoDocumento10 páginasCircuitos RL e RC: simulações e análise de constantes de tempoLucas TexAinda não há avaliações
- Clii02 12Documento5 páginasClii02 12Maycon ThaumaturgoAinda não há avaliações
- P1 Discreto - USPDocumento46 páginasP1 Discreto - USPedson.luis.silveiraAinda não há avaliações
- Especialização em Automação e ControleDocumento9 páginasEspecialização em Automação e ControleLucas SantosAinda não há avaliações
- Lista de Exercício - P2 - Controle - Linear - IDocumento6 páginasLista de Exercício - P2 - Controle - Linear - IVinicius RamosAinda não há avaliações
- Lista1 (1)Documento7 páginasLista1 (1)Tiago Rodrigues MendonçaAinda não há avaliações
- Controle em Malha FechadaDocumento5 páginasControle em Malha FechadaRenato Monteiro BatistaAinda não há avaliações
- Lab 4 SCMDocumento11 páginasLab 4 SCMCaetano PellegrinAinda não há avaliações
- Controle de Velocidade de Motor CC com Ball e HoopDocumento9 páginasControle de Velocidade de Motor CC com Ball e Hoopgabi freitasAinda não há avaliações
- Lista de exercícios para prova de sistemas de controleDocumento6 páginasLista de exercícios para prova de sistemas de controleDionizioAinda não há avaliações
- SR - T1 Dfiorillo Rev3Documento16 páginasSR - T1 Dfiorillo Rev3David de Almeida FiorilloAinda não há avaliações
- 09 Lugar Das Raízes 01Documento4 páginas09 Lugar Das Raízes 01Arthur LealAinda não há avaliações
- Controle PID de sistemas mecânicosDocumento37 páginasControle PID de sistemas mecânicosnatanteamAinda não há avaliações
- 2016.06.14 [Rep] - enunciado + soluçãoDocumento3 páginas2016.06.14 [Rep] - enunciado + soluçãobrunocor49Ainda não há avaliações
- Refrigeração, Ventilação e Ar-condicionado - Avaliação P1Documento4 páginasRefrigeração, Ventilação e Ar-condicionado - Avaliação P1Ricardo BrunnerAinda não há avaliações
- UFRGS-Layout e simulação do INVERSOR CMOS básicoDocumento7 páginasUFRGS-Layout e simulação do INVERSOR CMOS básicoFilipe BachiniAinda não há avaliações
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Documento26 páginasApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1Ainda não há avaliações
- Relatorio Controle de ProcessosDocumento23 páginasRelatorio Controle de Processosr282269zcAinda não há avaliações
- ZIEGLER&NICHOLSDocumento9 páginasZIEGLER&NICHOLSFabrício SoaresAinda não há avaliações
- Lab 07 (Presencial) - Controlador-Observador + LQR +LQGDocumento6 páginasLab 07 (Presencial) - Controlador-Observador + LQR +LQGGera BarbosaAinda não há avaliações
- Trabalho PID AnalogicoDocumento9 páginasTrabalho PID AnalogicoMarcus Vinicius100% (1)
- Labcd 01Documento12 páginasLabcd 01Gabriel KythAinda não há avaliações
- Margem de Ganho e Fase PDFDocumento40 páginasMargem de Ganho e Fase PDFleandrociscotoAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- Listasequencial 2Documento4 páginasListasequencial 2Isadora CardosoAinda não há avaliações
- Introdução à robótica - Resolução dos exercíciosDocumento18 páginasIntrodução à robótica - Resolução dos exercíciosMauricioAinda não há avaliações
- Prova 1 SCI 2021 1SDocumento7 páginasProva 1 SCI 2021 1SROBERTH HENRIQUE GUIMARAES DOS SANTOSAinda não há avaliações
- Exercícios de Controle e Servomecanismos IDocumento3 páginasExercícios de Controle e Servomecanismos IMatheus De MeloAinda não há avaliações
- Decodificador 7 segmentosDocumento12 páginasDecodificador 7 segmentosNathan SousaAinda não há avaliações
- LELO1 - Exp D10 2020Documento10 páginasLELO1 - Exp D10 2020Nathan SousaAinda não há avaliações
- Circuitos Codificadores e DecodificadoresDocumento15 páginasCircuitos Codificadores e DecodificadoresNathan SousaAinda não há avaliações
- LELO1 - Exp E9 2020Documento9 páginasLELO1 - Exp E9 2020Nathan SousaAinda não há avaliações
- Circuitos Aritméticos: Somadores, Subtratores e Complemento de DoisDocumento11 páginasCircuitos Aritméticos: Somadores, Subtratores e Complemento de DoisNathan SousaAinda não há avaliações
- Paraíso o Mundo Da Arte - Estudo de EnsinamentoDocumento2 páginasParaíso o Mundo Da Arte - Estudo de EnsinamentoWill CavalcanteAinda não há avaliações
- MicrobiologiaDocumento4 páginasMicrobiologiaanderson.lima.1006Ainda não há avaliações
- Engenharia - Avaliação de Imóveis e Outros BensDocumento27 páginasEngenharia - Avaliação de Imóveis e Outros BensnaimeAinda não há avaliações
- Traditional Chinese Medicine Factors in São Paulo EstablishmentDocumento242 páginasTraditional Chinese Medicine Factors in São Paulo EstablishmentAna BarbaraAinda não há avaliações
- Concentração de EmpresasDocumento7 páginasConcentração de EmpresasNono LivrosAinda não há avaliações
- II Ativ, Saúde e Tecnol, DronesDocumento5 páginasII Ativ, Saúde e Tecnol, DronesMárcio Henrique Da Conceição SousaAinda não há avaliações
- Ficha 1Documento2 páginasFicha 1gonçaloAinda não há avaliações
- Fundamentos Da Matéria Organica Do SoloDocumento3 páginasFundamentos Da Matéria Organica Do SoloAlberto Do Nascimento Silva50% (4)
- Clio 1292 3 - PTG PDFDocumento388 páginasClio 1292 3 - PTG PDFMiguel MachadoAinda não há avaliações
- Avaliação Diagnóstica (Proporcionalidade Direta)Documento2 páginasAvaliação Diagnóstica (Proporcionalidade Direta)luvieiradias6655Ainda não há avaliações
- Dicionário Etimológico da Mitologia Grega OnlineDocumento321 páginasDicionário Etimológico da Mitologia Grega OnlinevictorAinda não há avaliações
- Gabarito preliminar concurso público Rio Novo MGDocumento5 páginasGabarito preliminar concurso público Rio Novo MGLuiz Philip SimãoAinda não há avaliações
- Anais 6º Ebit 2020Documento792 páginasAnais 6º Ebit 2020AndersonFelixAinda não há avaliações
- Prova Eletrônica - Fundamentos Da AdministraçãoDocumento9 páginasProva Eletrônica - Fundamentos Da Administraçãonelsonsl18100% (3)
- D2 (9º ANO - Mat.) - Blog Do Prof. WarlesDocumento6 páginasD2 (9º ANO - Mat.) - Blog Do Prof. WarlesANA PAULA DA SILVA FERREIRAAinda não há avaliações
- E A Água Virou VinhoDocumento6 páginasE A Água Virou VinhoGiovanni GuimarãesAinda não há avaliações
- Processamento Do PepperoniDocumento8 páginasProcessamento Do Pepperonihilton dos amores comeAinda não há avaliações
- Bullying e cultura popDocumento70 páginasBullying e cultura popEdvaldo SoaresAinda não há avaliações
- Marketing Google século 21Documento4 páginasMarketing Google século 21Alice MAViMAinda não há avaliações
- Apostila de CLPs - LadderDocumento40 páginasApostila de CLPs - Ladderpososviki80% (5)
- Compêndio de NormasDocumento374 páginasCompêndio de NormasPolicia Civil Do AmazonasAinda não há avaliações
- Diogo Portugues 1Documento4 páginasDiogo Portugues 1SusanaDelindroAinda não há avaliações
- Desenho TécnicoDocumento62 páginasDesenho TécnicoEmmanuel Van Putten OliveiraAinda não há avaliações
- O que é a celulite e seus estágios de evoluçãoDocumento23 páginasO que é a celulite e seus estágios de evoluçãoSimone SouzaAinda não há avaliações
- Como Criar Um Pendrive de Boot Do Windows 8, 7 e Vista - ExplorandoDocumento8 páginasComo Criar Um Pendrive de Boot Do Windows 8, 7 e Vista - ExplorandoJose Leandro Oliveira CostaAinda não há avaliações
- Infantil V A Semana 17Documento7 páginasInfantil V A Semana 17Cristielen SilvaAinda não há avaliações
- Portfólio Individual Projeto de Extensão I - Negócios Imobiliários 2023 - Programa de Ação e Difusão CulturalDocumento1 páginaPortfólio Individual Projeto de Extensão I - Negócios Imobiliários 2023 - Programa de Ação e Difusão CulturalAlex NascimentoAinda não há avaliações
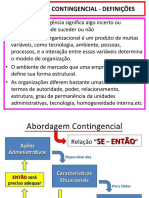
- 4 Slides Problema 04 Abordagem Contingencial Usado em T1Documento26 páginas4 Slides Problema 04 Abordagem Contingencial Usado em T1Soledad AlexandraAinda não há avaliações
- A Fenomenologia de Husserl e suas críticas ao PositivismoDocumento14 páginasA Fenomenologia de Husserl e suas críticas ao PositivismoIgor FortunatoAinda não há avaliações
- Plano 30k EuclidesDocumento7 páginasPlano 30k EuclidesEuclides MarquesAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Fundamentos de Cinemática e Dinâmica de MecanismosNo EverandFundamentos de Cinemática e Dinâmica de MecanismosAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- A Aprendizagem Cooperativa no Ensino da MatemáticaNo EverandA Aprendizagem Cooperativa no Ensino da MatemáticaNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- Princípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsNo EverandPrincípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsAinda não há avaliações
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)













































![2016.06.14 [Rep] - enunciado + solução](https://imgv2-2-f.scribdassets.com/img/document/720509354/149x198/c008c0add4/1712380503?v=1)