Você também pode gostar
- Trabalho de FQ - Atividade Laboratorial 1.3Documento9 páginasTrabalho de FQ - Atividade Laboratorial 1.3Gonçalo LopesAinda não há avaliações
- Contrato Aluguel de EspaçoDocumento2 páginasContrato Aluguel de EspaçoLeide Lopes75% (4)
- Hi Wall Springer Midea 33K InverterDocumento36 páginasHi Wall Springer Midea 33K InverterPatrick Simmons100% (3)
- 1 - (Lei de Hooke) Lucas Souza, Marcus Eduardo e RicardoDocumento10 páginas1 - (Lei de Hooke) Lucas Souza, Marcus Eduardo e RicardoLucas SouzaAinda não há avaliações
- Relatório Física Experimental Velocidade Do SomDocumento6 páginasRelatório Física Experimental Velocidade Do SomSidney RobertoAinda não há avaliações
- Coeficiente de ViscosidadeDocumento5 páginasCoeficiente de ViscosidadeDiabo NaterraAinda não há avaliações
- Relatório Lançamento de ProjéteisDocumento4 páginasRelatório Lançamento de ProjéteisLuiz Fernando F. De AndradeAinda não há avaliações
- MRU - Parte 2Documento7 páginasMRU - Parte 2AnaAinda não há avaliações
- Prática 5 - Relatório de Física Experimental UFCDocumento8 páginasPrática 5 - Relatório de Física Experimental UFCGabriela Kogan CapelettiAinda não há avaliações
- Resumo Da ''Teoria Pura Do Direito'' de Hans KelsenDocumento23 páginasResumo Da ''Teoria Pura Do Direito'' de Hans KelsenJaqueline AlmeidaAinda não há avaliações
- Teoria Do Crime - ResumoDocumento27 páginasTeoria Do Crime - ResumoDaniel Vieira Lourenço100% (1)
- Relatório Do Experimento Do Coeficiente de AtritoDocumento8 páginasRelatório Do Experimento Do Coeficiente de AtritoDamarlene AquinoAinda não há avaliações
- Relatorio Fis Exp MruDocumento17 páginasRelatorio Fis Exp MruIsabelaAinda não há avaliações
- Relatório Lab. Fisica Força Centripeta FinalDocumento12 páginasRelatório Lab. Fisica Força Centripeta FinalLucas MarcelinoAinda não há avaliações
- Relatório de FisicaDocumento4 páginasRelatório de FisicaLorenaAinda não há avaliações
- Relatório - Movimento Retilíneo Uniformemente AceleradoDocumento7 páginasRelatório - Movimento Retilíneo Uniformemente AceleradoJoão de MarcosAinda não há avaliações
- Relatorio 12 - Conservação de Energia MecânicaDocumento12 páginasRelatorio 12 - Conservação de Energia MecânicaAlex SandroAinda não há avaliações
- Lista 3 - Teste de HipótesesDocumento2 páginasLista 3 - Teste de HipótesesPatrick Simmons100% (1)
- CCM-180A WS - Manual Inst Oper (A-06-19) PDFDocumento52 páginasCCM-180A WS - Manual Inst Oper (A-06-19) PDFPatrick SimmonsAinda não há avaliações
- Relatorio de Conjunto de Corpos É Painéis de Forças Com TripeDocumento14 páginasRelatorio de Conjunto de Corpos É Painéis de Forças Com TripePABLO VENICIUS COSTA GUIMARAES100% (1)
- Relatório - RotaçãoDocumento8 páginasRelatório - RotaçãoRitaAnneAinda não há avaliações
- 01 Trabalho Sobre Rotação Dos Corpos RígidosDocumento10 páginas01 Trabalho Sobre Rotação Dos Corpos RígidosMadson Barbosa100% (1)
- Prática 4 - 378654 - Movimento Uniformemente VariadoDocumento8 páginasPrática 4 - 378654 - Movimento Uniformemente VariadoGabriel Victor SantanaAinda não há avaliações
- Relatório 9 - Momento de InérciaDocumento14 páginasRelatório 9 - Momento de InérciaNathalia Cristina LopesAinda não há avaliações
- Movimento Retilíneo Uniformemente VariadoDocumento3 páginasMovimento Retilíneo Uniformemente VariadoGuidiOliveiraAinda não há avaliações
- Colisões Elastíca e InelastícaDocumento13 páginasColisões Elastíca e InelastícaVal ArgentinoAinda não há avaliações
- Lab II - HidrodinâmicaDocumento6 páginasLab II - HidrodinâmicaHenrique Alves de LimaAinda não há avaliações
- Relatório de Colisões - Colisão Elástica e Colisão InelásticaDocumento8 páginasRelatório de Colisões - Colisão Elástica e Colisão InelásticaOsvaldoAinda não há avaliações
- Lista 1 - Oscilações e OndasDocumento4 páginasLista 1 - Oscilações e OndasDiêgo MarcosAinda não há avaliações
- Relatório - Momento de InérciaDocumento21 páginasRelatório - Momento de InérciaGisele CampanerAinda não há avaliações
- Relatório 1 - Pêndulo SimplesDocumento7 páginasRelatório 1 - Pêndulo SimplesDaniela ClaudinoAinda não há avaliações
- Um Pêndulo É Um Sistema Composto Por Uma Massa Acoplada A Um Pivô Que Permite Sua Movimentação LivrementeDocumento4 páginasUm Pêndulo É Um Sistema Composto Por Uma Massa Acoplada A Um Pivô Que Permite Sua Movimentação LivrementeIgor LeonardoAinda não há avaliações
- 150074-LISTA 4 - Movimento em Duas e Três DimensõesDocumento3 páginas150074-LISTA 4 - Movimento em Duas e Três DimensõesGabriela nauarAinda não há avaliações
- RELATÓRIO Queda LivreDocumento4 páginasRELATÓRIO Queda Livreallison123Ainda não há avaliações
- Constante Elástica - Métodos Experimentaois de EngenhariaDocumento26 páginasConstante Elástica - Métodos Experimentaois de EngenhariaFelipe Ramon MinervaAinda não há avaliações
- Relatório - Força de AtritoDocumento7 páginasRelatório - Força de AtritoDeborah S. FructuosoAinda não há avaliações
- Relatório Pêndulo FísicoDocumento20 páginasRelatório Pêndulo FísicoCarlos JuniorAinda não há avaliações
- Relatório 4 - Oscilações Forçadas e AmortecimentoDocumento24 páginasRelatório 4 - Oscilações Forçadas e AmortecimentoMicael Davi Lima de OliveiraAinda não há avaliações
- Movimento Combinado de Rotação e TranslaçãoDocumento3 páginasMovimento Combinado de Rotação e TranslaçãoJLid LdrAinda não há avaliações
- Relatorio MolasDocumento5 páginasRelatorio MolasLucas Gabriel CasagrandeAinda não há avaliações
- Gravitação e Leis de Kepler - RelátorioDocumento18 páginasGravitação e Leis de Kepler - RelátorioTiago TelesAinda não há avaliações
- Relatorio Experimento 04Documento12 páginasRelatorio Experimento 04Iago ManancezziAinda não há avaliações
- Lista de Exercícios 1 - Grandezas, Unidades e Algarismos Significativos - Física Geral IDocumento5 páginasLista de Exercícios 1 - Grandezas, Unidades e Algarismos Significativos - Física Geral IJonas VarãoAinda não há avaliações
- Relatório - Coeficiente de AtritoDocumento5 páginasRelatório - Coeficiente de AtritoMarcelo Vitor F. DiasAinda não há avaliações
- Relatório 03 - MRUDocumento11 páginasRelatório 03 - MRUWesley AlvesAinda não há avaliações
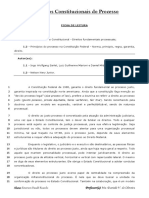
- 1 - I G B - Grupo Do Cobre PDFDocumento16 páginas1 - I G B - Grupo Do Cobre PDFAlberto UbisseAinda não há avaliações
- Relatorio Experimental Sobre Lei de HookeDocumento11 páginasRelatorio Experimental Sobre Lei de HookeAlonso MalherAinda não há avaliações
- Relatorio Lei de Hooke - VerdadeiroDocumento7 páginasRelatorio Lei de Hooke - VerdadeiroAndré KromAinda não há avaliações
- Relatório Massa-MolaDocumento14 páginasRelatório Massa-MolaMaria Isabele Almeida CoelhoAinda não há avaliações
- Queda LivreDocumento18 páginasQueda LivreTiago TelesAinda não há avaliações
- Relatorio I - MRUADocumento17 páginasRelatorio I - MRUAN.jr100% (3)
- Física - UFC - Aula 10 ExercíciosDocumento4 páginasFísica - UFC - Aula 10 ExercíciosFísica Caderno de Resoluções100% (1)
- Experimento 02 - Pêndulo FísicoDocumento8 páginasExperimento 02 - Pêndulo FísicoVanessa PenedaAinda não há avaliações
- Resolvidos - Fisica UfmgDocumento53 páginasResolvidos - Fisica UfmgrtodymAinda não há avaliações
- Relatório Prática DiodoDocumento23 páginasRelatório Prática DiodoGrazielle AmandaAinda não há avaliações
- Relatório (Forças Impulsivas)Documento5 páginasRelatório (Forças Impulsivas)PedroPerdigoAinda não há avaliações
- Relatorio 3 - Mru e MruvDocumento8 páginasRelatorio 3 - Mru e MruvEloiza RibeiroAinda não há avaliações
- Relatório 5 - Colisão InelásticaDocumento5 páginasRelatório 5 - Colisão InelásticaMarcoStalin100% (2)
- (20170417004446) FT Conteúdo 8 Pré Aula Lei de Torricelli Efeito Venturi Tubo de Pitot e Efeito MagnumDocumento6 páginas(20170417004446) FT Conteúdo 8 Pré Aula Lei de Torricelli Efeito Venturi Tubo de Pitot e Efeito MagnumRaphael LopesAinda não há avaliações
- Relatório Física Experimental I (Corrigido) - Lucas RodriguesDocumento10 páginasRelatório Física Experimental I (Corrigido) - Lucas RodriguesLucas RodriguesAinda não há avaliações
- Prova - 3 - 2020 1 ManhaDocumento1 páginaProva - 3 - 2020 1 ManhaTúlio Bento100% (1)
- Experiência 1 - Pêndulo SimplesDocumento7 páginasExperiência 1 - Pêndulo SimplesJoão Pedro BarbosaAinda não há avaliações
- Relatorio Mesa de ForçasDocumento8 páginasRelatorio Mesa de ForçasPatricia SchumacherAinda não há avaliações
- RM05B - Manual Inst Oper (A-06-19)Documento20 páginasRM05B - Manual Inst Oper (A-06-19)Patrick SimmonsAinda não há avaliações
- GW-MOD - Manual Oper e Mapeamto (A-06-19) PDFDocumento40 páginasGW-MOD - Manual Oper e Mapeamto (A-06-19) PDFPatrick SimmonsAinda não há avaliações
- GW-BAC - Manual Especific (A-06-19)Documento12 páginasGW-BAC - Manual Especific (A-06-19)Patrick SimmonsAinda não há avaliações
- Trox - EquipamientosDocumento20 páginasTrox - EquipamientosluisAinda não há avaliações
- Trox Instruções Técnicas Covid19 PDFDocumento10 páginasTrox Instruções Técnicas Covid19 PDFPatrick SimmonsAinda não há avaliações
- Sistema de Ventilação Evaporativa Na Esfera Industrial Como Alternativa No Tratamento Do Stress TérmicoDocumento60 páginasSistema de Ventilação Evaporativa Na Esfera Industrial Como Alternativa No Tratamento Do Stress TérmicoPatrick SimmonsAinda não há avaliações
- Aula 5 - Pré-Carga de Junções em Tração (Estática) - EXERCÍCIODocumento10 páginasAula 5 - Pré-Carga de Junções em Tração (Estática) - EXERCÍCIOPatrick SimmonsAinda não há avaliações
- Af Ae Folheto Multi V5 A4Documento20 páginasAf Ae Folheto Multi V5 A4Patrick SimmonsAinda não há avaliações
- Aula 4 - Pré-Carga de Junções em Tração (Estática)Documento13 páginasAula 4 - Pré-Carga de Junções em Tração (Estática)Patrick SimmonsAinda não há avaliações
- Aula 3 - Tensões em Roscas e Elementos de MáquinasDocumento23 páginasAula 3 - Tensões em Roscas e Elementos de MáquinasPatrick SimmonsAinda não há avaliações
- Aula 15 Pfi 2014 Usinagem ProcessosDocumento79 páginasAula 15 Pfi 2014 Usinagem ProcessosJoão SaterAinda não há avaliações
- Formulário Engrenagens Cilíndricas de Dentes RetosDocumento7 páginasFormulário Engrenagens Cilíndricas de Dentes RetosPatrick SimmonsAinda não há avaliações
- Lista de Exercícios 2 - ProbabilidadeDocumento3 páginasLista de Exercícios 2 - ProbabilidadePatrick Simmons100% (1)
- Lista 1 - SequênciasDocumento3 páginasLista 1 - SequênciasPatrick Simmons100% (1)
- Ficha de Leitura 1Documento3 páginasFicha de Leitura 1Percineia AudrinAinda não há avaliações
- Facção Que Comanda Tráfico No Norte Tem "Conexões Estreitas" Com As Farc, Diz MPFDocumento3 páginasFacção Que Comanda Tráfico No Norte Tem "Conexões Estreitas" Com As Farc, Diz MPFDiego LopesAinda não há avaliações
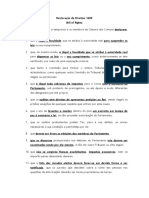
- Histórico - Declaração de Direitos 1689 - Bill of RightDocumento2 páginasHistórico - Declaração de Direitos 1689 - Bill of RightMarcelo Brito dos SantosAinda não há avaliações
- Dano X ResponsabilidadeDocumento2 páginasDano X ResponsabilidadeMyllon MarchiAinda não há avaliações
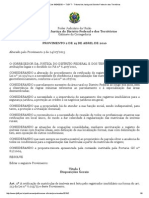
- Provimento 2 de 19 - 04 - 2010 - TJDFT - Tribunal de Justiça Do Distrito Federal e Dos Territórios PDFDocumento8 páginasProvimento 2 de 19 - 04 - 2010 - TJDFT - Tribunal de Justiça Do Distrito Federal e Dos Territórios PDFLuis ZagonelAinda não há avaliações
- ICA 33-22 - Convocação, Seleção e Incorporação de Profissionais de Nível Superior Voluntários À Prestação Do Serviço Militar Temporário PDFDocumento40 páginasICA 33-22 - Convocação, Seleção e Incorporação de Profissionais de Nível Superior Voluntários À Prestação Do Serviço Militar Temporário PDFVanessa Gomes100% (1)
- 7º Simulado Oab - Gabarito ComentadoDocumento64 páginas7º Simulado Oab - Gabarito ComentadoPepita AlvesAinda não há avaliações
- De Direito Constitucional: ManualDocumento40 páginasDe Direito Constitucional: ManualLuatom LimaAinda não há avaliações
- Trabalho Sobre Rendimento Social de InserçãoDocumento19 páginasTrabalho Sobre Rendimento Social de InserçãoManuela LancastreAinda não há avaliações
- Bi NR 217 24 Nov 16 PDFDocumento24 páginasBi NR 217 24 Nov 16 PDFJaquelineAinda não há avaliações
- Pedido de Liberdade ProvissóriaDocumento3 páginasPedido de Liberdade ProvissóriaAntéia AndradeAinda não há avaliações
- Faculdade Novo HorizonteDocumento3 páginasFaculdade Novo HorizonteMarine BarbosaAinda não há avaliações
- Pro Grad 322016 Result An Exo I JudicialDocumento17 páginasPro Grad 322016 Result An Exo I JudicialRodrigo Eberhart Musaio SommaAinda não há avaliações
- Modelo Do Contrato de Locação Espaço Salão de FestaDocumento3 páginasModelo Do Contrato de Locação Espaço Salão de Festaronaldo valerio araujoAinda não há avaliações
- Acao Cobranca Roberto JuniorDocumento5 páginasAcao Cobranca Roberto JuniorBeatriz GomesAinda não há avaliações
- Simulado Damásio OAB 2 FASE XI Exame Direito PenalDocumento16 páginasSimulado Damásio OAB 2 FASE XI Exame Direito PenalMaycon SilvaAinda não há avaliações
- NCNDADocumento6 páginasNCNDAR CAinda não há avaliações
- Sugestões - de - Atividades - de - História - de - Acordo - Com - As - 3 - Q Uestões - Mais - Erradas - Nas - Avaliações - DiagnósticasDocumento2 páginasSugestões - de - Atividades - de - História - de - Acordo - Com - As - 3 - Q Uestões - Mais - Erradas - Nas - Avaliações - DiagnósticasAngélica TrindadeAinda não há avaliações
- Modelo Do Termo Estágio Nova Lei de Estágio 11788 de 25/09/2008 (EMIP - Química)Documento3 páginasModelo Do Termo Estágio Nova Lei de Estágio 11788 de 25/09/2008 (EMIP - Química)huitamineiroAinda não há avaliações
- Simulado Lei AnticorrupçãoDocumento8 páginasSimulado Lei AnticorrupçãoAnonymous nR2meJwqfAinda não há avaliações
- Aula 02 - Negativa IndevidaDocumento6 páginasAula 02 - Negativa IndevidaClaudia VicenteAinda não há avaliações
- Cibercrime e Contraterrorismo - SILVA JR., Nelmon J.Documento69 páginasCibercrime e Contraterrorismo - SILVA JR., Nelmon J.SILVA JR, Nelmon J.Ainda não há avaliações
- O Ativismo Judicial Mal Compreendido Luiz WerneckDocumento3 páginasO Ativismo Judicial Mal Compreendido Luiz WerneckmarkeysAinda não há avaliações
- 52934-Apostila de Maquinas e Automacao Eletrica 2010 1 08032010 ATE PG 70Documento70 páginas52934-Apostila de Maquinas e Automacao Eletrica 2010 1 08032010 ATE PG 70Sidney Pereira100% (1)
- ECA SimuladoDocumento6 páginasECA Simuladosilviavidal2Ainda não há avaliações
- Prova Geral 2021-1 189Documento8 páginasProva Geral 2021-1 189Claudio LeivasAinda não há avaliações
- Karl Marx - Os DespossuídosDocumento6 páginasKarl Marx - Os DespossuídosDaniel MotaAinda não há avaliações