Você também pode gostar
- Aula de HelicopteroDocumento23 páginasAula de HelicopteroEvandro OliveiraAinda não há avaliações
- Aerodinâmica de HelicópterosDocumento22 páginasAerodinâmica de HelicópterosAgnaldo Timoteo MinaoAinda não há avaliações
- 14 Vibrações Verticais e Horizontais e Efeito ConeDocumento6 páginas14 Vibrações Verticais e Horizontais e Efeito ConeAlberto DellinghausenAinda não há avaliações
- Aerodinâmica para Helicópteros Autor Federação Portuguesa de AeromodelismoDocumento19 páginasAerodinâmica para Helicópteros Autor Federação Portuguesa de AeromodelismoGabriel LimaAinda não há avaliações
- Funcionamento HelicópterosDocumento50 páginasFuncionamento HelicópterosGiate Instruções Táticas100% (1)
- Manual de HelicopteroDocumento48 páginasManual de HelicopteroDailton VasconAinda não há avaliações
- Curso de extensão sobre helicópterosDocumento19 páginasCurso de extensão sobre helicópterosBob Medeiros100% (1)
- Aerodinâmica Helicóptero 1Documento151 páginasAerodinâmica Helicóptero 1Paula e César BarretoAinda não há avaliações
- Teoria Voo PDF HelicopteroDocumento32 páginasTeoria Voo PDF HelicopteroFelipe VarandaAinda não há avaliações
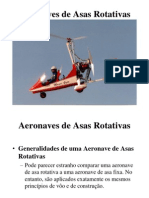
- Asas Rotativas AeronavesDocumento84 páginasAsas Rotativas AeronavesAdriano Freire Silva100% (1)
- Respostas Teoria de VooDocumento14 páginasRespostas Teoria de VooFelipeAraujoAinda não há avaliações
- Helices PDFDocumento35 páginasHelices PDFrentabitalAinda não há avaliações
- Helicopter rotor system explainedDocumento11 páginasHelicopter rotor system explainedIgor DiasAinda não há avaliações
- Aprendendo sobre HélicesDocumento17 páginasAprendendo sobre Hélicesjota_reis100% (1)
- Apostila de Teoria de Vôo de HelicópteroDocumento34 páginasApostila de Teoria de Vôo de HelicópteroRafaell DalpraAinda não há avaliações
- Aula 1: Conhecimentos Gerais de Aeronaves - Cga: Aeroclube Do Estado Do Espírito SantoDocumento143 páginasAula 1: Conhecimentos Gerais de Aeronaves - Cga: Aeroclube Do Estado Do Espírito SantoRoberto Fernandes100% (1)
- Teoria de Voo - Helicóptero - (WWW - Canalpiloto.com - BR)Documento31 páginasTeoria de Voo - Helicóptero - (WWW - Canalpiloto.com - BR)Breno SantanaAinda não há avaliações
- TEORIA VOO HELICÓPTERODocumento31 páginasTEORIA VOO HELICÓPTEROabelpramos100% (1)
- TOìPICOS - TOTAL (1) Cópia PDFDocumento421 páginasTOìPICOS - TOTAL (1) Cópia PDFVictor LucasAinda não há avaliações
- Resumo PPHDocumento50 páginasResumo PPHEverton Scabelo Entringer100% (1)
- Rpas Multirotores - Teoria de VooDocumento14 páginasRpas Multirotores - Teoria de VooRômulo AndradeAinda não há avaliações
- Aerodinâmica Rotores HelicópterosDocumento33 páginasAerodinâmica Rotores HelicópterosRicardo CanudasAinda não há avaliações
- Teoria de VooDocumento35 páginasTeoria de VooHoumem Skandrani100% (1)
- Resumo Teoria de Vôo PPDocumento6 páginasResumo Teoria de Vôo PPJoao Wictor SouzaAinda não há avaliações
- Resumo Teoria de Vôo - Piloto PrivadoDocumento12 páginasResumo Teoria de Vôo - Piloto PrivadoX100% (1)
- Resumo de Teoria de Vôo (PP)Documento6 páginasResumo de Teoria de Vôo (PP)Adriano Zanatta100% (4)
- Teoria - Voo - PDF HelicópteroDocumento32 páginasTeoria - Voo - PDF HelicópteroComte Martins100% (14)
- Teoria de VooDocumento13 páginasTeoria de VooWalmir Dutra de MoraesAinda não há avaliações
- Fatores que influenciam a eficiência da hélice em aeronavesDocumento10 páginasFatores que influenciam a eficiência da hélice em aeronavesFlavio Mesquita-Aircraft MechanicAinda não há avaliações
- Resumos HelicópterosDocumento18 páginasResumos HelicópterosRo Avelino TeixeiraAinda não há avaliações
- Teoria de Voo Piloto Privado de AviãoDocumento17 páginasTeoria de Voo Piloto Privado de AviãoMiguel Angel MartinAinda não há avaliações
- Stadnick - Aero Cta PPDocumento168 páginasStadnick - Aero Cta PPRodolfo FerreiraAinda não há avaliações
- Aula 07Documento8 páginasAula 07Danilo VarandaAinda não há avaliações
- Projeto aerodinâmico de hélices para aviaçãoDocumento24 páginasProjeto aerodinâmico de hélices para aviaçãoAndré Franco Rios CatapaniAinda não há avaliações
- 2 Prova de AERDocumento6 páginas2 Prova de AERDouglas DMartinsAinda não há avaliações
- Aerodinâmica de HelicópterosDocumento82 páginasAerodinâmica de HelicópterosDaniel Barbosa MotaAinda não há avaliações
- Aerodinâmica e PropulsãoDocumento4 páginasAerodinâmica e PropulsãoDouglas DMartinsAinda não há avaliações
- O poder das turbinas eólicas e aerogeradoresDocumento32 páginasO poder das turbinas eólicas e aerogeradoresGualter SantosAinda não há avaliações
- Hélices de aviões: características e tiposDocumento26 páginasHélices de aviões: características e tiposthallesx47Ainda não há avaliações
- Hélices: princípios e operaçãoDocumento35 páginasHélices: princípios e operaçãoWallace GiorgioAinda não há avaliações
- 07 HelicesDocumento35 páginas07 HelicesAirton VitorAinda não há avaliações
- Aerodinamica 2Documento24 páginasAerodinamica 2bispojpAinda não há avaliações
- Atividade de VF Matéria Teoria de Voo - Claudiemerson Bezerra de LimaDocumento2 páginasAtividade de VF Matéria Teoria de Voo - Claudiemerson Bezerra de Limaclaudiemerson.limaAinda não há avaliações
- Resumo Teoria de Voo PCDocumento25 páginasResumo Teoria de Voo PCrafaelnora100% (9)
- Aerodinâmica, Flap, Slat e CamberDocumento6 páginasAerodinâmica, Flap, Slat e CamberTatiane BenedictoAinda não há avaliações
- HELICES DE AERONAVES - VOL 1Documento66 páginasHELICES DE AERONAVES - VOL 1Alexandre VilarAinda não há avaliações
- Bloco 4Documento8 páginasBloco 4Yasmim OliveiraAinda não há avaliações
- 1.3 Teoria Básica de VooDocumento10 páginas1.3 Teoria Básica de VooLarissaAinda não há avaliações
- Elevação Artificial Por Bombeio MecânicoNo EverandElevação Artificial Por Bombeio MecânicoAinda não há avaliações
- Manual de Proprietários, Motoristas e Chofer: THE POETRY OF THE END OF THE WORLD, מסכת מכות, Chaves de Tetuan, by Mois BenarrochNo EverandManual de Proprietários, Motoristas e Chofer: THE POETRY OF THE END OF THE WORLD, מסכת מכות, Chaves de Tetuan, by Mois BenarrochAinda não há avaliações
- Questoes ANAC Aerodinamica-MMADocumento18 páginasQuestoes ANAC Aerodinamica-MMAcontatolourivaloliveiraAinda não há avaliações
- Resumo Regulamento - Rev 1Documento20 páginasResumo Regulamento - Rev 1EDAPA PILOTOSAinda não há avaliações
- Escala Semanal Piloto PrivadoDocumento3 páginasEscala Semanal Piloto PrivadoEDAPA PILOTOSAinda não há avaliações
- Resumo Performance SantiDocumento18 páginasResumo Performance SantiEDAPA PILOTOS100% (1)
- Escala Pilotos - Jd. Do Trevo - JunhoDocumento4 páginasEscala Pilotos - Jd. Do Trevo - JunhoEDAPA PILOTOSAinda não há avaliações
- Escala Final de Semana Piloto PrivadoDocumento1 páginaEscala Final de Semana Piloto PrivadoEDAPA PILOTOSAinda não há avaliações
- Escala Semanal Piloto PrivadoDocumento3 páginasEscala Semanal Piloto PrivadoEDAPA PILOTOSAinda não há avaliações
- ESCALA PILOTOS - JD. DO TREVO - AgostoDocumento2 páginasESCALA PILOTOS - JD. DO TREVO - AgostoEDAPA PILOTOSAinda não há avaliações
- Escalas semanais pilotos privado e comercialDocumento4 páginasEscalas semanais pilotos privado e comercialEDAPA PILOTOSAinda não há avaliações
- Escala Pilotos - Sede Brasil - AbrilDocumento2 páginasEscala Pilotos - Sede Brasil - AbrilEDAPA PILOTOSAinda não há avaliações
- Simuladão Do FifiDocumento2 páginasSimuladão Do FifiEDAPA PILOTOSAinda não há avaliações
- Escala Semanal Piloto PrivadoDocumento2 páginasEscala Semanal Piloto PrivadoEDAPA PILOTOSAinda não há avaliações
- Vaga Assistente Segurança PCD Aeroporto ViracoposDocumento1 páginaVaga Assistente Segurança PCD Aeroporto ViracoposEDAPA PILOTOSAinda não há avaliações
- Noturna - 2 - A - 6 - MarDocumento1 páginaNoturna - 2 - A - 6 - MarEDAPA PILOTOSAinda não há avaliações
- Escala final de semana M.M.A. com horários de aulas e instrutoresDocumento1 páginaEscala final de semana M.M.A. com horários de aulas e instrutoresEDAPA PILOTOSAinda não há avaliações
- Matutina 2 A 6-MarDocumento1 páginaMatutina 2 A 6-MarEDAPA PILOTOSAinda não há avaliações
- Editoria Scriptum contribuições poesiaDocumento127 páginasEditoria Scriptum contribuições poesiaAna Paula DacotaAinda não há avaliações
- Tipos de erupções vulcânicas: efusivas, mistas e explosivasDocumento2 páginasTipos de erupções vulcânicas: efusivas, mistas e explosivascensabAinda não há avaliações
- Seja Amada e Reconhecida Por Seu MaridoDocumento59 páginasSeja Amada e Reconhecida Por Seu MaridoMilton NevesAinda não há avaliações
- Lista de Exercícios de Genética - 3º TrimestreDocumento6 páginasLista de Exercícios de Genética - 3º TrimestreJosi ReusAinda não há avaliações
- TR - APOIO ADMINISTRATIVO E OPERACIONAL - REVISADO Assinado Assinado AssinadoDocumento49 páginasTR - APOIO ADMINISTRATIVO E OPERACIONAL - REVISADO Assinado Assinado AssinadoLeo SouzaAinda não há avaliações
- Modelos de Ocupação de Prática TODocumento15 páginasModelos de Ocupação de Prática TORebecca MarquesAinda não há avaliações
- Elizabeth Miranda - 06-03-23Documento2 páginasElizabeth Miranda - 06-03-23Paulo Cesar do Nascimento TrindadeAinda não há avaliações
- ALIANÇA PLANO DE ASSISTÊNCIA FAMILIAR COM SERVIÇOS FUNERÁRIOS E CONVENIOS MEDICOSDocumento2 páginasALIANÇA PLANO DE ASSISTÊNCIA FAMILIAR COM SERVIÇOS FUNERÁRIOS E CONVENIOS MEDICOSVanessa NoroAinda não há avaliações
- LCV F1C 110 KW (150 HP) at 3500 RPMDocumento1 páginaLCV F1C 110 KW (150 HP) at 3500 RPMThiago Scarso ScarsoAinda não há avaliações
- Orientações para promover diversidadeDocumento28 páginasOrientações para promover diversidademerycorrAinda não há avaliações
- Transporte DutoviárioDocumento10 páginasTransporte DutoviárioRudson Dheymes0% (1)
- Fundamentos de Desenho TécnicoDocumento138 páginasFundamentos de Desenho TécnicoAnderson SccpAinda não há avaliações
- Engenharia Elétrica: PMS - BA 2019Documento16 páginasEngenharia Elétrica: PMS - BA 2019rannier07Ainda não há avaliações
- Contabilidade Geral - Estudo de Caso 2Documento6 páginasContabilidade Geral - Estudo de Caso 2Lays Macedo78% (9)
- Módulo Sobre o Empirismo Cético de David HumeDocumento33 páginasMódulo Sobre o Empirismo Cético de David Humeluisr4879Ainda não há avaliações
- 01 Edital - CIEF 2023Documento20 páginas01 Edital - CIEF 2023Pedro ReisAinda não há avaliações
- Redes urbanas e financeirização do território brasileiroDocumento20 páginasRedes urbanas e financeirização do território brasileiroCláudio SmalleyAinda não há avaliações
- Introdução Às Operações UnitáriasDocumento25 páginasIntrodução Às Operações UnitáriasVictor Augusto SousaAinda não há avaliações
- O que é o GohonzonDocumento9 páginasO que é o GohonzonBruno CamargoAinda não há avaliações
- Interface CNC Usb RNR Eco2 r08 4ax Mach3Documento36 páginasInterface CNC Usb RNR Eco2 r08 4ax Mach3Cha Batista100% (2)
- Accao 1035Documento20 páginasAccao 1035Korps92Ainda não há avaliações
- Como identificar os conectores dos módulos Mercedes-BenzDocumento12 páginasComo identificar os conectores dos módulos Mercedes-BenzAnonymous ljkiyqJt8M100% (3)
- Artigo Cientifico Sobre ComunicaçãoDocumento22 páginasArtigo Cientifico Sobre ComunicaçãoGetúlio RibeiroAinda não há avaliações
- O PEQUENO PRÍNCIPE Cap I II e IIIDocumento4 páginasO PEQUENO PRÍNCIPE Cap I II e IIIMARLISE ROSANGELA SCHORNAinda não há avaliações
- Avaliação de obstáculos ao desenvolvimentoDocumento8 páginasAvaliação de obstáculos ao desenvolvimentoVictor RebeloAinda não há avaliações
- Dados Exemplo Casa - CompletoDocumento16 páginasDados Exemplo Casa - Completomurilo cavallariAinda não há avaliações
- Trabalho AvaliativoDocumento4 páginasTrabalho AvaliativoMatheus coutoAinda não há avaliações
- Índice Geral de Referências TécnicasDocumento59 páginasÍndice Geral de Referências Técnicasdudurez100% (1)
- Fispq Tintas para Maquiagem Definitiva Electric InkDocumento5 páginasFispq Tintas para Maquiagem Definitiva Electric InkAnonymous h4gf78QbMAinda não há avaliações
- Efeitos do choque elétrico no corpo humanoDocumento11 páginasEfeitos do choque elétrico no corpo humanoEstefano João Ângelo GermanoAinda não há avaliações