Você também pode gostar
- 1074-Article Text-3754-1-10-20201217Documento7 páginas1074-Article Text-3754-1-10-20201217Vitor HolandaAinda não há avaliações
- NMPC baseado em quatérnios para controle de quadricópterosDocumento6 páginasNMPC baseado em quatérnios para controle de quadricópterosluciopatricioAinda não há avaliações
- Robótica - QuestionarioDocumento5 páginasRobótica - QuestionarioJOSIAS ALVES FEITOSAAinda não há avaliações
- Estratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosNo EverandEstratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosAinda não há avaliações
- Minha Parte - Robo Scara e ArticuladoDocumento25 páginasMinha Parte - Robo Scara e ArticuladoAugusto CanedoAinda não há avaliações
- Robo de Coordenadas Esfericas EstudarDocumento3 páginasRobo de Coordenadas Esfericas EstudarMarcelo SilvaAinda não há avaliações
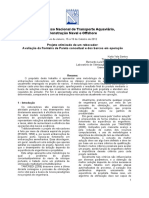
- Projeto otimizado de rebocador portuárioDocumento22 páginasProjeto otimizado de rebocador portuárioRenato Oliveira100% (1)
- LINKSDocumento18 páginasLINKSAugusto CanedoAinda não há avaliações
- Projeto Fonfon 3 - RelatorioDocumento9 páginasProjeto Fonfon 3 - RelatorioAugusto CanedoAinda não há avaliações
- Robo Manipulador ParaleloDocumento6 páginasRobo Manipulador Paralelodanilo_costa_oliveira8724Ainda não há avaliações
- Controlador PID Adaptativo Via Redes Neurais-LMS para Controle de Altitude de QuadricopteroDocumento6 páginasControlador PID Adaptativo Via Redes Neurais-LMS para Controle de Altitude de QuadricopteroPedro Cezar Rodrigues BaltazarAinda não há avaliações
- Anotações - Projeto de Construção de Um Drone HexacópteroDocumento3 páginasAnotações - Projeto de Construção de Um Drone HexacópteroLorrana FrançaAinda não há avaliações
- Otimização do movimento 5-DOF em simulador 3-DOFDocumento6 páginasOtimização do movimento 5-DOF em simulador 3-DOFrafaelcb3Ainda não há avaliações
- 159753, 10225 - Texto Do ArtigoDocumento15 páginas159753, 10225 - Texto Do ArtigoLucas AvilaAinda não há avaliações
- Sistema DPDocumento8 páginasSistema DPMauricio SilvaAinda não há avaliações
- Eltonnickel,+Alejandro PtDocumento6 páginasEltonnickel,+Alejandro PtBruno AlmeidaAinda não há avaliações
- Aula Automação IndustrialDocumento39 páginasAula Automação IndustrialAlex OliveiraAinda não há avaliações
- Fundamentos da robótica industrial emDocumento31 páginasFundamentos da robótica industrial emtiagoeber100% (1)
- Automação e Controle - Disciplina de Engenharia ElétricaDocumento27 páginasAutomação e Controle - Disciplina de Engenharia ElétricajaumAinda não há avaliações
- 7688-Texto do artigo-32979-1-10-20170913Documento14 páginas7688-Texto do artigo-32979-1-10-20170913Danilo HipnoAinda não há avaliações
- ROBOTICA 02 A Componentes PDFDocumento56 páginasROBOTICA 02 A Componentes PDFHelder Anibal HerminiAinda não há avaliações
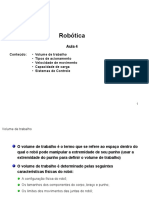
- Aula 4 Tipos de AcionamentoDocumento14 páginasAula 4 Tipos de AcionamentoAdriano AraujoAinda não há avaliações
- Artigo SBEIN 2012 JPS WCLF V3Documento11 páginasArtigo SBEIN 2012 JPS WCLF V3Ana Cristina VieiraAinda não há avaliações
- Galoa Proceedings Sobena Hidroviario 2021 140012Documento4 páginasGaloa Proceedings Sobena Hidroviario 2021 140012Ana Flávia VoltarelliAinda não há avaliações
- Comandos de Vôo PDFDocumento4 páginasComandos de Vôo PDFYyyuritgAinda não há avaliações
- Aspectos construtivos de robôs industriaisDocumento5 páginasAspectos construtivos de robôs industriaisEliasibe AlvesAinda não há avaliações
- Proposta de Sistema Computacional para o DimensionDocumento6 páginasProposta de Sistema Computacional para o DimensionHelaine Costa SalesAinda não há avaliações
- Desenvolvimento de um sistema eletro-hidráulico de movimentação para elevadas cargas no setor industrialNo EverandDesenvolvimento de um sistema eletro-hidráulico de movimentação para elevadas cargas no setor industrialAinda não há avaliações
- Trabalho RobóticaDocumento11 páginasTrabalho Robóticaandre albinoAinda não há avaliações
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesNo EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesAinda não há avaliações
- Automação de pontes rolantes siderúrgicasDocumento9 páginasAutomação de pontes rolantes siderúrgicasrafaeltopo100% (1)
- ROBOTICA 01 B Aplicacoes e DefinicoesDocumento122 páginasROBOTICA 01 B Aplicacoes e DefinicoesFelipe SilvestreAinda não há avaliações
- Introdução A RoboticaDocumento112 páginasIntrodução A Roboticanilsonery100% (2)
- Controle de posição de veículo subaquático usando modos deslizantes e linearizaçãoDocumento16 páginasControle de posição de veículo subaquático usando modos deslizantes e linearizaçãodanielAinda não há avaliações
- Relatório Final - Protótipo de Transelevador AutomatizadoDocumento9 páginasRelatório Final - Protótipo de Transelevador AutomatizadoWilSantosJrAinda não há avaliações
- An Alise e S Intese de Controladores: Simula C Ao e Constru C Aodeum QuadricopteroDocumento8 páginasAn Alise e S Intese de Controladores: Simula C Ao e Constru C Aodeum QuadricopteroEzeuiel TelinhoAinda não há avaliações
- Marcos Silva Tarefa2Documento14 páginasMarcos Silva Tarefa2Marcos SilvaAinda não há avaliações
- 06 - Polos - LQR - V3 - UnDocumento13 páginas06 - Polos - LQR - V3 - UnLuiz PivovarAinda não há avaliações
- Sistema robótico de inspeção em tubulação industrialDocumento17 páginasSistema robótico de inspeção em tubulação industrialAlexandre mendesAinda não há avaliações
- Dimensionamento de CameDocumento5 páginasDimensionamento de CameGabriel de AlmeidaAinda não há avaliações
- Controle de Manobras de Um Veiculo Espacial Por MeDocumento11 páginasControle de Manobras de Um Veiculo Espacial Por MeGerson Timbe SGAinda não há avaliações
- Robótica Aula01Documento56 páginasRobótica Aula01CLEBER HENRIQUE SILVA JÚNIORAinda não há avaliações
- Introdução à RobóticaDocumento92 páginasIntrodução à RobóticaBebasso LokoAinda não há avaliações
- (Apostila) Robótica Industrial - FEUPEDocumento101 páginas(Apostila) Robótica Industrial - FEUPEEduardo BandeiraAinda não há avaliações
- Projeto de máquinas de elevação e transporteDocumento9 páginasProjeto de máquinas de elevação e transporteGustavo SantosAinda não há avaliações
- Trabalho UnifranDocumento20 páginasTrabalho UnifranHenrique FonsecaAinda não há avaliações
- O Braço MecânicoDocumento25 páginasO Braço MecânicoDavid Pericles BitencourtAinda não há avaliações
- Carlos, Thiago SilvaDocumento28 páginasCarlos, Thiago SilvamarcusAinda não há avaliações
- Trabalho CamesDocumento14 páginasTrabalho CamesAlexandre KrulAinda não há avaliações
- Capa 141210053851 Conversion Gate02Documento25 páginasCapa 141210053851 Conversion Gate02Drayton Mizael de SouzaAinda não há avaliações
- Análise de perfis aerodinâmicos com interpolaçãoDocumento10 páginasAnálise de perfis aerodinâmicos com interpolaçãoElner CrystianAinda não há avaliações
- Atividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoDocumento4 páginasAtividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoaradilrpgAinda não há avaliações
- O Sistema Fly by Wire MixedDocumento9 páginasO Sistema Fly by Wire MixedDouglas DiasAinda não há avaliações
- Pesquisa Sobre Robôs Industriais (3H)Documento29 páginasPesquisa Sobre Robôs Industriais (3H)Leonardo Figliolino de OliveiraAinda não há avaliações
- 01 Apontamentos Controlo Voo ISTDocumento109 páginas01 Apontamentos Controlo Voo ISTRose TeixeiraAinda não há avaliações
- Artigo Cientifico PDFDocumento4 páginasArtigo Cientifico PDFPriscila FalcãoAinda não há avaliações
- Transportadores de correia: definições, componentes e dimensionamentoDocumento15 páginasTransportadores de correia: definições, componentes e dimensionamentodarinfsuAinda não há avaliações
- SMMC 2021 Paper 31Documento4 páginasSMMC 2021 Paper 31discipulosdemacguyverAinda não há avaliações
- Aula2 - Descrição Espacial - TransformaçõesDocumento23 páginasAula2 - Descrição Espacial - TransformaçõesjocarliiAinda não há avaliações
- Robôs manipuladores articulações característicasDocumento2 páginasRobôs manipuladores articulações característicasJoao Alex100% (1)
- Apostila 14 CAD Conceitos BasicosDocumento4 páginasApostila 14 CAD Conceitos BasicosJardel JuniorAinda não há avaliações
- A lição do abacaxiDocumento3 páginasA lição do abacaxiJunior John Erich Da SilvaAinda não há avaliações
- Ajustes nas matrizes curriculares do ensino médio para 2023Documento2 páginasAjustes nas matrizes curriculares do ensino médio para 2023THAIS SABATINO MONTEIRO FERNANDES DE CASTROAinda não há avaliações
- Estudo Das CoresDocumento4 páginasEstudo Das CoresJohn Kennedy100% (1)
- Procedimentos Que Todo Médico Deveria SaberDocumento485 páginasProcedimentos Que Todo Médico Deveria SaberRayllane Santos NunesAinda não há avaliações
- SUZUKI, J. C. Campo e Cidade No Brasil Transformações Socioespaciais e Dificuldades de Conceituação. Revista NERA (UNESP), V. 10, P. 134-150, 2007.Documento15 páginasSUZUKI, J. C. Campo e Cidade No Brasil Transformações Socioespaciais e Dificuldades de Conceituação. Revista NERA (UNESP), V. 10, P. 134-150, 2007.Ykaro FelipheAinda não há avaliações
- Gestão de estoques: funções, custos e controleDocumento121 páginasGestão de estoques: funções, custos e controlePedro HenriqueAinda não há avaliações
- PEDAGOGIA INTEGRADA MatériaDocumento18 páginasPEDAGOGIA INTEGRADA MatériaMilenaAinda não há avaliações
- Esqueleto ApendicularDocumento12 páginasEsqueleto ApendicularMarcelo MarcosAinda não há avaliações
- Agradecimentos e expediente de livro sobre AmazôniaDocumento187 páginasAgradecimentos e expediente de livro sobre AmazôniaFilipe Augusto Vieira D'OliveiraAinda não há avaliações
- Controle Display Cristal LíquidoDocumento14 páginasControle Display Cristal LíquidoEmerson ReisAinda não há avaliações
- A Escola Indígena José Carapina em Pariconha - AL - Memórias Sobre A Concepção, Construção e o Ensino Diferenciado (2003-2018)Documento39 páginasA Escola Indígena José Carapina em Pariconha - AL - Memórias Sobre A Concepção, Construção e o Ensino Diferenciado (2003-2018)Sheyla FariasAinda não há avaliações
- Magnetismo - Estudo da atração e repulsão de objetos magnéticosDocumento5 páginasMagnetismo - Estudo da atração e repulsão de objetos magnéticosMoisés Nunes MoreiraAinda não há avaliações
- Deficiência MúltiplaDocumento8 páginasDeficiência MúltiplaLeandroAinda não há avaliações
- NR 12 - Furadeira de Coluna 3-4 CVDocumento15 páginasNR 12 - Furadeira de Coluna 3-4 CVCPSSTAinda não há avaliações
- Orizicultura Nos Campos Do Mondego: Antes e Depois Do EmparcelamentoDocumento14 páginasOrizicultura Nos Campos Do Mondego: Antes e Depois Do EmparcelamentoInês FreireAinda não há avaliações
- Laudo de Inspeção Equipamentos MoveisDocumento3 páginasLaudo de Inspeção Equipamentos Moveisgabmonique_85740137490% (10)
- Simulado PCDF - Atualidades e RideDocumento5 páginasSimulado PCDF - Atualidades e RideRobertão SrnAinda não há avaliações
- Beneficios Da Acupuntura Na Terceira IdadeDocumento15 páginasBeneficios Da Acupuntura Na Terceira IdadeNilton BragaAinda não há avaliações
- Rdo Rev.12 07 18Documento2 páginasRdo Rev.12 07 18Cassio CostaAinda não há avaliações
- Avaliação de Ciências 5º Ano 1º BDocumento4 páginasAvaliação de Ciências 5º Ano 1º Bvaleria cristina de souzaAinda não há avaliações
- A Psicologia Da Educação e Seus Elementos Essenciais - AtivDocumento7 páginasA Psicologia Da Educação e Seus Elementos Essenciais - AtivPatrice HellenAinda não há avaliações
- A Escrita Da História - Peter BurkeDocumento2 páginasA Escrita Da História - Peter BurkeNatália CorrêaAinda não há avaliações
- Prevenindo A AcneDocumento31 páginasPrevenindo A AcneReimer RochaAinda não há avaliações
- Relatório 1 - RecristalizaçãoDocumento9 páginasRelatório 1 - RecristalizaçãoAlexander JuniorAinda não há avaliações
- RUÍDO NO AMBIENTE DE TRABALHODocumento6 páginasRUÍDO NO AMBIENTE DE TRABALHOrodri23Ainda não há avaliações
- Textos de inspiração para o coraçãoDocumento23 páginasTextos de inspiração para o coraçãoJoysse Campanha PsicólogaAinda não há avaliações
- Adesao RenainfDocumento2 páginasAdesao RenainfRodrigo VerissimoAinda não há avaliações
- COMUNICADO - Ensino Médio - Informações Sobre As Avaliações P3 Do Primeiro Trimestre e SIMULADO BERNOULLI (Específico para A Turma 301)Documento2 páginasCOMUNICADO - Ensino Médio - Informações Sobre As Avaliações P3 Do Primeiro Trimestre e SIMULADO BERNOULLI (Específico para A Turma 301)CronosAinda não há avaliações
- Biblioteca Escolar (39950)Documento5 páginasBiblioteca Escolar (39950)Nilson CortesAinda não há avaliações