Você também pode gostar
- Apresentação 04.06 RevDocumento23 páginasApresentação 04.06 RevDiogo Cavalcante Rodrigues LopesAinda não há avaliações
- Aula 6. Tema 3 e 4 ExrciciosDocumento43 páginasAula 6. Tema 3 e 4 ExrciciosHaroldo BritoAinda não há avaliações
- Controle de VibraçõesDocumento13 páginasControle de VibraçõesCassio AveiroAinda não há avaliações
- Trabalho - Metodo de Rayleigh-RitzDocumento9 páginasTrabalho - Metodo de Rayleigh-RitzoseiascariocaAinda não há avaliações
- Vibrações Livres e Forçadas (Excitação Harmônica e de Impacto) de Um Sistema Com Um Grau de LiberdadeDocumento5 páginasVibrações Livres e Forçadas (Excitação Harmônica e de Impacto) de Um Sistema Com Um Grau de LiberdadecarpolotesAinda não há avaliações
- Vibração Livre Com Amortecimento ViscosoDocumento9 páginasVibração Livre Com Amortecimento ViscosoRaul SilvaAinda não há avaliações
- PROVA 1-VibraçoesDocumento4 páginasPROVA 1-Vibraçoeswillian lopes peçanhaAinda não há avaliações
- Exercicios Sistemas DiscretosDocumento6 páginasExercicios Sistemas DiscretosMatheus Durães MilhomensAinda não há avaliações
- Relatório 1 - Sistema Vibratório Com Um Grau de LiberdadeDocumento8 páginasRelatório 1 - Sistema Vibratório Com Um Grau de LiberdadeMarianna BürgelAinda não há avaliações
- CAP8-Vibração e Resposta No Domínio Do TempoDocumento76 páginasCAP8-Vibração e Resposta No Domínio Do TempoJunior Augusto67% (3)
- Lista de ExercíciosDocumento5 páginasLista de ExercíciosRogério SouzaAinda não há avaliações
- Vibracoes Lista2-1Documento3 páginasVibracoes Lista2-1Gabriel 49Ainda não há avaliações
- Relatório de Vibrações - Experimento Massa-MolaDocumento14 páginasRelatório de Vibrações - Experimento Massa-MolaBruna NoratAinda não há avaliações
- Dinamica - Sismica - Aníbal Costa PDFDocumento106 páginasDinamica - Sismica - Aníbal Costa PDFPablo BenitezAinda não há avaliações
- Lista de Exercício 3Documento2 páginasLista de Exercício 3Eduardo WichnovskiAinda não há avaliações
- Lista de Exercícios Extras para P1 de Vibrações I - RDocumento18 páginasLista de Exercícios Extras para P1 de Vibrações I - RPolly PeçanhaAinda não há avaliações
- 4-Vibracoes Sob Condicoes Forcantes GeraisDocumento34 páginas4-Vibracoes Sob Condicoes Forcantes GeraisAmanda Falzirolli0% (1)
- VP1 Dinâmica Das Máquinas 2019 2Documento4 páginasVP1 Dinâmica Das Máquinas 2019 2Jose Rui BarbosaAinda não há avaliações
- Lista 2Documento9 páginasLista 2Monique KrupinskiAinda não há avaliações
- Apostila Vibracoes BoscoDocumento126 páginasApostila Vibracoes BoscoThales Ranniere100% (1)
- Vibrações Mecânicas - Vitor NovaesDocumento9 páginasVibrações Mecânicas - Vitor NovaesVitor NovaesAinda não há avaliações
- Lista Extra de Exercicios Vibracoes I - RDocumento16 páginasLista Extra de Exercicios Vibracoes I - RIsabelaAinda não há avaliações
- 1a Lista de Exercicios 2018.2Documento3 páginas1a Lista de Exercicios 2018.2Gleydson Santos0% (1)
- Lista 01 Vibrações MecanicasDocumento3 páginasLista 01 Vibrações MecanicasFelipe FurtadoAinda não há avaliações
- MHS PDFDocumento4 páginasMHS PDFJonathan BurtonAinda não há avaliações
- Apostila Vibrações - FEIDocumento66 páginasApostila Vibrações - FEIfagnermatosAinda não há avaliações
- Lista de ProteçãoDocumento13 páginasLista de ProteçãoAndré Soares da SilvaAinda não há avaliações
- Vibrações Mecânicas 2Documento11 páginasVibrações Mecânicas 2PedroAinda não há avaliações
- Lista I - Vibrações MecânicasDocumento2 páginasLista I - Vibrações MecânicasJonathanNeryAinda não há avaliações
- VSM - Aula 2 - FundamentosDocumento17 páginasVSM - Aula 2 - FundamentosMdhufifj3ifAinda não há avaliações
- Sistemas Vibracionais em MatlabDocumento10 páginasSistemas Vibracionais em MatlabRosiana SilvaAinda não há avaliações
- Controle de Vibrações - Prática 3Documento24 páginasControle de Vibrações - Prática 3Carolina TelesAinda não há avaliações
- Aplicação de Equações Diferenciais Na Análise Dinâmica de EsDocumento30 páginasAplicação de Equações Diferenciais Na Análise Dinâmica de EsAe MenteAinda não há avaliações
- Análise Dinâmica Pelo Método de Elementos FinitosDocumento86 páginasAnálise Dinâmica Pelo Método de Elementos FinitossaidmsrochaAinda não há avaliações
- Relatório 3Documento8 páginasRelatório 3Hennerson A. SilvaAinda não há avaliações
- Apostila Vibrações UFCG PDFDocumento110 páginasApostila Vibrações UFCG PDFPaulo Venicio Alves VieiraAinda não há avaliações
- Vibrações Mecânicas 1Documento15 páginasVibrações Mecânicas 1PedroAinda não há avaliações
- NBR 7497 - Vibrações Mecânicas e ChoquesDocumento35 páginasNBR 7497 - Vibrações Mecânicas e ChoquesleaavilaAinda não há avaliações
- Lista - 1 - Dinâmica Das Máquinas e Vibrações - Alunos - UNIFOA - 2020Documento7 páginasLista - 1 - Dinâmica Das Máquinas e Vibrações - Alunos - UNIFOA - 2020leo uauAinda não há avaliações
- Relatório - Aula PráticaDocumento9 páginasRelatório - Aula PráticaVanessa SampaioAinda não há avaliações
- Lista de Atividade 01 - Ana Claudia Berto de AraujoDocumento3 páginasLista de Atividade 01 - Ana Claudia Berto de AraujoAna Claudia AraujoAinda não há avaliações
- Controle de Vibrações - IsolamentoDocumento21 páginasControle de Vibrações - IsolamentoCarolina TelesAinda não há avaliações
- Prática 3 - RelatórioDocumento16 páginasPrática 3 - RelatórioHenrique Boaventura MedeirosAinda não há avaliações
- Projeto de MáquinasDocumento22 páginasProjeto de MáquinasJeferson AlexandreAinda não há avaliações
- Isolamento de VibraçõesDocumento9 páginasIsolamento de VibraçõesLaura CampesattoAinda não há avaliações
- Isee P4 2021-2 PDFDocumento4 páginasIsee P4 2021-2 PDFjaderfillipeAinda não há avaliações
- Aula 08 - Desbalanceamento RotativoDocumento7 páginasAula 08 - Desbalanceamento RotativoShueidy Braga50% (2)
- Atividade 2 - Vibrações Mecânicas e Acústicas - 51-2024Documento5 páginasAtividade 2 - Vibrações Mecânicas e Acústicas - 51-2024admcavaliniassessoriaAinda não há avaliações
- VibracoesDocumento15 páginasVibracoesManjolo Janfar WilsonAinda não há avaliações
- Vibracoes Lista1-1Documento6 páginasVibracoes Lista1-1Gabriel 49Ainda não há avaliações
- AULA 1 2 VIBRACAO LIVRE NAO AMORTECIDA Rev01Documento6 páginasAULA 1 2 VIBRACAO LIVRE NAO AMORTECIDA Rev01danielpinheiro07Ainda não há avaliações
- Controle de Vibrações - IsolamentoDocumento21 páginasControle de Vibrações - IsolamentoCarolina TelesAinda não há avaliações
- Lista Exercicios Forced ResponseDocumento7 páginasLista Exercicios Forced ResponseHuana Lima CorrêaAinda não há avaliações
- Estabilidade do equilíbrio das estruturasNo EverandEstabilidade do equilíbrio das estruturasAinda não há avaliações
- Aprendendo a mecânica quântica: equação de Schrödinger em 1DNo EverandAprendendo a mecânica quântica: equação de Schrödinger em 1DAinda não há avaliações
- Exercícios de Integrais e Equações Integro-DiferenciaisNo EverandExercícios de Integrais e Equações Integro-DiferenciaisAinda não há avaliações
- Sistemas Offshore 2012 v1Documento26 páginasSistemas Offshore 2012 v1cesarAinda não há avaliações
- Aspectos Historicos Eng de Estruturas - pp51-60Documento10 páginasAspectos Historicos Eng de Estruturas - pp51-60cesarAinda não há avaliações
- Capítulo 4Documento28 páginasCapítulo 4cesarAinda não há avaliações
- Capítulo 5Documento31 páginasCapítulo 5cesarAinda não há avaliações
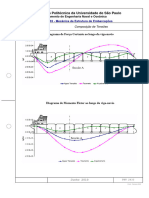
- Composicao de TensoesDocumento5 páginasComposicao de TensoescesarAinda não há avaliações
- PNVeng Reservatorios 2011Documento40 páginasPNVeng Reservatorios 2011cesarAinda não há avaliações
- Hidrodinâmica - Exercício 1 - ManobrabilidadeDocumento3 páginasHidrodinâmica - Exercício 1 - ManobrabilidadecesarAinda não há avaliações
- Instalações de Máquinas Propulsoras - Aula - Ciclos Reais + Parâmetros Desemp MotoresDocumento17 páginasInstalações de Máquinas Propulsoras - Aula - Ciclos Reais + Parâmetros Desemp MotorescesarAinda não há avaliações
- Hidrodinâmica - Resolução Disco AtuadorDocumento1 páginaHidrodinâmica - Resolução Disco AtuadorcesarAinda não há avaliações
- Captulo 3 Apostila AntigaDocumento65 páginasCaptulo 3 Apostila AntigacesarAinda não há avaliações
- TaxasencargosDocumento1 páginaTaxasencargoscesarAinda não há avaliações
- Hotelaria Bacharelado Internacional - 106Documento2 páginasHotelaria Bacharelado Internacional - 106cesarAinda não há avaliações
- Engenharia Elétrica - Comp - 106Documento12 páginasEngenharia Elétrica - Comp - 106cesarAinda não há avaliações
- Edital Vestibular 2006.2semestre NIDocumento22 páginasEdital Vestibular 2006.2semestre NIcesarAinda não há avaliações
- Graduacao20062 MecanicaDocumento3 páginasGraduacao20062 MecanicacesarAinda não há avaliações
- Monopoli 10025540Documento84 páginasMonopoli 10025540cesarAinda não há avaliações
- Design de Um Catamarã de Transporte Urbano para o Rio CapibaribeDocumento12 páginasDesign de Um Catamarã de Transporte Urbano para o Rio CapibaribecesarAinda não há avaliações
- 185 - Salhua y Levi COMPLETO REVISADO (Brasil) PDFDocumento21 páginas185 - Salhua y Levi COMPLETO REVISADO (Brasil) PDFMulekiinhoBulamarckAinda não há avaliações
- Aquecimento de Ar - PalleyDocumento10 páginasAquecimento de Ar - Palleyusuaruio_epAinda não há avaliações
- 1 Lista de Exercicios - Poo - Lucas Zuque - 2268710Documento7 páginas1 Lista de Exercicios - Poo - Lucas Zuque - 2268710Lucas ZuqueAinda não há avaliações
- Analise Corporal 3Documento34 páginasAnalise Corporal 3Christiane Barbi100% (1)
- Vaesen (101-155) en PTDocumento55 páginasVaesen (101-155) en PT- Th3K1ngAinda não há avaliações
- 12.07 - PortuguesDocumento9 páginas12.07 - PortuguesMarcos HenriqueAinda não há avaliações
- Apostila Irrigação 2012Documento77 páginasApostila Irrigação 2012anon_140267718Ainda não há avaliações
- Dilatação Linear de Um Sólido MetálicoDocumento9 páginasDilatação Linear de Um Sólido MetálicoCarlos HenriqueAinda não há avaliações
- Apostila de ExerciciosDocumento119 páginasApostila de ExerciciosHeitor Berger100% (1)
- Peça de Arquitetura - IniciaçãoDocumento1 páginaPeça de Arquitetura - Iniciaçãoleonardo barcelosAinda não há avaliações
- Como Reproduzir Orquídeas Facilmente em Casa - Keikis, Estacas e BulbosDocumento12 páginasComo Reproduzir Orquídeas Facilmente em Casa - Keikis, Estacas e BulbosfegenoliAinda não há avaliações
- NBR 5858 - 1983Documento15 páginasNBR 5858 - 1983telnet837Ainda não há avaliações
- Relatório de EstagioDocumento14 páginasRelatório de EstagioCastro Naldo0% (1)
- Boletim Técnico Textura DesignerDocumento3 páginasBoletim Técnico Textura DesignerGabriel AvelinoAinda não há avaliações
- Direito Obrigações - Casos Praticos 1Documento16 páginasDireito Obrigações - Casos Praticos 1Esdras J. ReisAinda não há avaliações
- Atividade TOC TOCDocumento2 páginasAtividade TOC TOCSr RamosAinda não há avaliações
- Gep44 7Documento6 páginasGep44 7Eleandro Jesus GonçalvesAinda não há avaliações
- Despesas CaiãoDocumento6 páginasDespesas CaiãoCaio VitalAinda não há avaliações
- Texto Empuxo e Principio de ArquimedesDocumento5 páginasTexto Empuxo e Principio de ArquimedesAlberto MaiaAinda não há avaliações
- Master BIM - IPOGDocumento20 páginasMaster BIM - IPOGGrover FmzAinda não há avaliações
- giroscópio2012editadoPDF (Roteiro) III PDFDocumento8 páginasgiroscópio2012editadoPDF (Roteiro) III PDFxotunredmailtopAinda não há avaliações
- Plano de Ensino PDFDocumento3 páginasPlano de Ensino PDFIdna AlencarAinda não há avaliações
- Avaliação - Educação Do Deficiente Físico e Do Múltiplo DeficienteDocumento3 páginasAvaliação - Educação Do Deficiente Físico e Do Múltiplo DeficienteAngelo ParriniAinda não há avaliações
- Marvel RPGDocumento6 páginasMarvel RPGChaulin Diogo da CostaAinda não há avaliações
- Catalogo de Propriedades Termicas de Paredes e CoberturasDocumento13 páginasCatalogo de Propriedades Termicas de Paredes e CoberturasIsrael BrazAinda não há avaliações
- A Importância Da SeletividadeDocumento5 páginasA Importância Da SeletividadeSergio Ricardo NobreAinda não há avaliações
- Ebook Takae Sasaki V002 PDFDocumento27 páginasEbook Takae Sasaki V002 PDFRenato BaptistaAinda não há avaliações
- Bambozzi Talha Eletrica Manual de Instrucao 439850Documento34 páginasBambozzi Talha Eletrica Manual de Instrucao 439850MárcioHenriqueAinda não há avaliações
- Homônios Veetais GAS ETILENODocumento36 páginasHomônios Veetais GAS ETILENOCleber AssisAinda não há avaliações
- Egito AntigoDocumento3 páginasEgito AntigoMarcio Martins de SouzaAinda não há avaliações
- Chainsaw HeartDocumento11 páginasChainsaw Heartcardosooliveiralucas982Ainda não há avaliações