Fazer download em doc, pdf ou txt
Você também pode gostar
- Relatório Técnico Inspeção - NR10 MTE)Documento4 páginasRelatório Técnico Inspeção - NR10 MTE)Eirisberto Rodrigues de Moraes100% (8)
- Trakker 380Documento4 páginasTrakker 380fikavagAinda não há avaliações
- Manual de Operação e Manutenção Stronger ST3030Documento84 páginasManual de Operação e Manutenção Stronger ST3030Jeová Luciano100% (1)
- Motores de RelutanciaDocumento14 páginasMotores de RelutanciaRenan CésarAinda não há avaliações
- Motores de PassoDocumento11 páginasMotores de PassoWil WiltmarAinda não há avaliações
- Geradores CCDocumento9 páginasGeradores CCVictor Hugo100% (1)
- Lista Unidade 1Documento5 páginasLista Unidade 1BeatrizAinda não há avaliações
- Programação Software Somove Tesys TDocumento46 páginasProgramação Software Somove Tesys Trodolfo100% (1)
- EF06CI02 - Transformações QuímicasDocumento25 páginasEF06CI02 - Transformações QuímicasRonnielle Cabral RolimAinda não há avaliações
- Qta Contatores ABB AF145... AF1250: (Quadro Transferência Automática)Documento7 páginasQta Contatores ABB AF145... AF1250: (Quadro Transferência Automática)Júnior Nascimento100% (1)
- Motores EspeciaisDocumento3 páginasMotores Especiaisingryd mailaAinda não há avaliações
- Motor de PassoDocumento13 páginasMotor de PassoFábio AssisAinda não há avaliações
- Trabalho de Instrumentação-Motor de PassoDocumento10 páginasTrabalho de Instrumentação-Motor de PassorafaelfbbAinda não há avaliações
- Motor de Passo 01Documento15 páginasMotor de Passo 01rafaellsjcAinda não há avaliações
- Tópico 3 - Saídas - Atuadores 2020Documento80 páginasTópico 3 - Saídas - Atuadores 2020Lucas Cirino PAinda não há avaliações
- ELETROMECÂNICADocumento22 páginasELETROMECÂNICAEverton SantosAinda não há avaliações
- Lucas Rodrigues - Relatório Motor de Passo - EletrotécnicaDocumento5 páginasLucas Rodrigues - Relatório Motor de Passo - EletrotécnicaLucas RodriguesAinda não há avaliações
- Servo Motores Rui PiresDocumento7 páginasServo Motores Rui PiresRui PiresAinda não há avaliações
- Documento 11Documento3 páginasDocumento 11João Henrique Ivo FreitasAinda não há avaliações
- Artigo Servomotores Maquinas2Documento4 páginasArtigo Servomotores Maquinas2Isa OliveiraAinda não há avaliações
- Dúvidas Frequentes SERVODocumento2 páginasDúvidas Frequentes SERVOARILDO ROBERTO LEMESAinda não há avaliações
- Apostila Treinamento Motores de Passo Drivers Rev01Documento27 páginasApostila Treinamento Motores de Passo Drivers Rev01lucapeta100% (1)
- Slide 8 Motor de Passo e Servomotor 2021-2Documento32 páginasSlide 8 Motor de Passo e Servomotor 2021-2Felipe Fiorotti da RochaAinda não há avaliações
- Aula3-Motor-De-Passo - FEIS - UnespDocumento43 páginasAula3-Motor-De-Passo - FEIS - UnespSetor SuporteAinda não há avaliações
- 02 RMF - ServoMotorDocumento19 páginas02 RMF - ServoMotorvenomvAinda não há avaliações
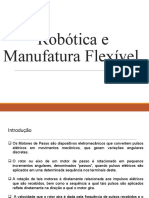
- 03 RMF - Motor de PassoDocumento30 páginas03 RMF - Motor de PassovenomvAinda não há avaliações
- Régua Óptica, Motor de Passo e Servo DriveDocumento3 páginasRégua Óptica, Motor de Passo e Servo DriveEduardo HenriqueAinda não há avaliações
- Recuperação mod10-TPDocumento9 páginasRecuperação mod10-TPWant3d StrikeAinda não há avaliações
- Aula3 Motor de Passo 2013 1 13 03 2013 Final PDFDocumento43 páginasAula3 Motor de Passo 2013 1 13 03 2013 Final PDFEdneiPossidoniodeOliveiraAinda não há avaliações
- Roda GiganteDocumento9 páginasRoda GiganteJoana NogueiraAinda não há avaliações
- Servo MotoresDocumento12 páginasServo Motoreseric976100% (1)
- ELETROMECÂNICADocumento24 páginasELETROMECÂNICAEverton SantosAinda não há avaliações
- Motor de PassoDocumento37 páginasMotor de PassoMoises Gomes de LimaAinda não há avaliações
- Aula 3 e 4Documento9 páginasAula 3 e 4NicoAinda não há avaliações
- Inversor de FrequênciaDocumento7 páginasInversor de FrequênciaedimarAinda não há avaliações
- Trabalho de Motor de PassoDocumento23 páginasTrabalho de Motor de Passosaulomachado8262Ainda não há avaliações
- Servo MotorDocumento12 páginasServo MotorLOlzitoAinda não há avaliações
- MecatrónicaDocumento8 páginasMecatrónicafranciscoxaviearaujoAinda não há avaliações
- Motor de PassoDocumento15 páginasMotor de PassoRobson De Siqueira OggioniAinda não há avaliações
- Servo Motor CCDocumento15 páginasServo Motor CCRachel DaleAinda não há avaliações
- Motor de Corrente ContínuaDocumento6 páginasMotor de Corrente ContínuaJONAS MOREIRA LIRAAinda não há avaliações
- Apostila de InversoresDocumento49 páginasApostila de InversoresLeandro SilvaAinda não há avaliações
- Servo AcionamentosDocumento18 páginasServo AcionamentosPatrese QuelemesAinda não há avaliações
- Seminario 072826Documento22 páginasSeminario 072826Jonasse SalvadorAinda não há avaliações
- Proposta de PesquisaDocumento3 páginasProposta de PesquisaEduardo CarvalhoAinda não há avaliações
- Apostila Motor de Passo CtismDocumento13 páginasApostila Motor de Passo Ctismtiago.luz3922Ainda não há avaliações
- Motor de Corrente ContínuaDocumento5 páginasMotor de Corrente ContínuaRenato Oliveira de NovaesAinda não há avaliações
- 1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoDocumento14 páginas1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoProf. Bryan CupelloAinda não há avaliações
- Motor de Corrente Contínua Características e Aplicações!Documento12 páginasMotor de Corrente Contínua Características e Aplicações!Anderson PaulinoAinda não há avaliações
- Motores de Passo-UTFPRDocumento14 páginasMotores de Passo-UTFPRAirton FloresAinda não há avaliações
- Motor LinearDocumento4 páginasMotor LinearJose JuniorAinda não há avaliações
- Apresentação PS UNIFAP ProfessorDocumento28 páginasApresentação PS UNIFAP ProfessorBrendel FreitasAinda não há avaliações
- PP JacksonDocumento8 páginasPP JacksonFabrício Soares de OliveiraAinda não há avaliações
- Variadores de VelocidadeDocumento19 páginasVariadores de VelocidadeFábio LeiteAinda não há avaliações
- IntroduçãoDocumento3 páginasIntroduçãonilsocristovaolAinda não há avaliações
- Manual Do Motor de PassoDocumento15 páginasManual Do Motor de PassoAmauriGarciaAinda não há avaliações
- Paper Motor Elétrico IIDocumento13 páginasPaper Motor Elétrico IIThiago Camargo100% (1)
- Servo Motor EsDocumento17 páginasServo Motor EsAntoniaMariaAinda não há avaliações
- Qual A Diferença Entre Soft Start e Inversor de FrequênciaDocumento3 páginasQual A Diferença Entre Soft Start e Inversor de FrequênciaUlisses RodriguesAinda não há avaliações
- Aula Motor de Excitação Sem Escovas Ou Bruslhess DC MotorDocumento5 páginasAula Motor de Excitação Sem Escovas Ou Bruslhess DC MotorLuís Agostinho AlfredoAinda não há avaliações
- Projetos Com Esp8266 Programado Em Lua - Parte XxiiiNo EverandProjetos Com Esp8266 Programado Em Lua - Parte XxiiiAinda não há avaliações
- 02 Chaves Seccionadora de MTDocumento20 páginas02 Chaves Seccionadora de MTingryd mailaAinda não há avaliações
- 01 Cabines Primárias - parte 2Documento21 páginas01 Cabines Primárias - parte 2ingryd mailaAinda não há avaliações
- 03 Transformadores para Instrumentos - TCs e TPsDocumento57 páginas03 Transformadores para Instrumentos - TCs e TPsingryd mailaAinda não há avaliações
- 01 Cabines Primárias - parte 1Documento27 páginas01 Cabines Primárias - parte 1ingryd mailaAinda não há avaliações
- Sepam 1000 - Apresentação SchneiderDocumento143 páginasSepam 1000 - Apresentação Schneideringryd mailaAinda não há avaliações
- 00 Apresentação Disjuntor Média TensãoDocumento94 páginas00 Apresentação Disjuntor Média Tensãoingryd mailaAinda não há avaliações
- Performability Evaluation of Railway Systems: A Study On The Impact of Adding Alternative RoutesDocumento7 páginasPerformability Evaluation of Railway Systems: A Study On The Impact of Adding Alternative Routesingryd mailaAinda não há avaliações
- SICFER - Volume 1 - Metodologia e ConceitosDocumento69 páginasSICFER - Volume 1 - Metodologia e Conceitosingryd mailaAinda não há avaliações
- Análise Drenagem FerroviaDocumento5 páginasAnálise Drenagem Ferroviaingryd mailaAinda não há avaliações
- Apostila NR-10 ADocumento71 páginasApostila NR-10 Aingryd mailaAinda não há avaliações
- M23A - Máquina de ChaveDocumento24 páginasM23A - Máquina de Chaveingryd maila100% (1)
- Apotila Do Outlook 2013Documento10 páginasApotila Do Outlook 2013ingryd mailaAinda não há avaliações
- Quadro Produtção e Quadro ReatoresDocumento1 páginaQuadro Produtção e Quadro ReatoresVivianeAinda não há avaliações
- Tipos de DisjuntorDocumento17 páginasTipos de DisjuntorAmerco Tivane67% (3)
- Barramento de Subestaes - Um Estudo de Caso Com Condutores RgidosDocumento112 páginasBarramento de Subestaes - Um Estudo de Caso Com Condutores Rgidosmateuso_15Ainda não há avaliações
- Catalogo Tecnico CondumaxDocumento80 páginasCatalogo Tecnico CondumaxLuis Vilela100% (1)
- Catalogo Krebs Irrigacao 2013Documento40 páginasCatalogo Krebs Irrigacao 2013Diogo Lima GuimarãesAinda não há avaliações
- D 1.2 - TemporizadoresDocumento55 páginasD 1.2 - TemporizadoresMARIA GIOVANA LACORTE DA SILVAAinda não há avaliações
- Contrato de Arrendamento Habitacional Com Prazo CertoDocumento3 páginasContrato de Arrendamento Habitacional Com Prazo CertoJoão Gomes FernandesAinda não há avaliações
- Fontes Chaveadas - RespostasDocumento7 páginasFontes Chaveadas - RespostasGil Santos100% (1)
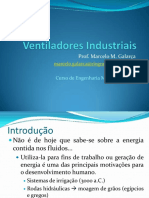
- Vent Il AdoresDocumento116 páginasVent Il Adorescharles cordeiroAinda não há avaliações
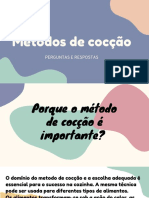
- Revisão 3.1 - Metodos de CocçãoDocumento83 páginasRevisão 3.1 - Metodos de CocçãoIsabella SilvaAinda não há avaliações
- Aplicação Diferencial - 87-02Documento7 páginasAplicação Diferencial - 87-02Solange Antonio Carlos100% (1)
- Cheles - O AlquevaDocumento11 páginasCheles - O AlquevaLeonor VieiraAinda não há avaliações
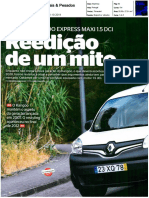
- RENAULT KANGOO EXPRESS MAXI 1.5 Dci NA "COMERCIAIS & PESADOS"Documento5 páginasRENAULT KANGOO EXPRESS MAXI 1.5 Dci NA "COMERCIAIS & PESADOS"Grupo Renault PortugalAinda não há avaliações
- Exercicios Resolvidos de EcologiaDocumento9 páginasExercicios Resolvidos de EcologiaTheo Ribeiro100% (2)
- Purificaçãodo CaldoDocumento60 páginasPurificaçãodo CaldoEduardo MirandaAinda não há avaliações
- Empilhadores TOYOTADocumento108 páginasEmpilhadores TOYOTAlafss100% (1)
- CQ238 - Pe 2021 - Video 03Documento30 páginasCQ238 - Pe 2021 - Video 03Nicole Graça MaiaAinda não há avaliações
- Relatorio 3Documento7 páginasRelatorio 3Murilo de LimaAinda não há avaliações
- EXERCICIOSDocumento6 páginasEXERCICIOSYud Caetano FöxinhoAinda não há avaliações
- ACP de Máquinas Eléctricas 2 Semeste 2018 (Correcao)Documento5 páginasACP de Máquinas Eléctricas 2 Semeste 2018 (Correcao)Ednercio LuisAinda não há avaliações
- Fispq Solo A10-v2.Detector de GasesDocumento1 páginaFispq Solo A10-v2.Detector de GasesClayton MarquesAinda não há avaliações
- Plano Preliminar TRILHA CNCHSADocumento30 páginasPlano Preliminar TRILHA CNCHSARuan Pablo50% (2)
- Catálogo - Evaporador BMDocumento8 páginasCatálogo - Evaporador BMDouglas W. Dos SantosAinda não há avaliações