Você também pode gostar
- GE - LVGE10-LVGE11-LVGE12-LVGE15-TD10-TD15 OkDocumento58 páginasGE - LVGE10-LVGE11-LVGE12-LVGE15-TD10-TD15 OkPaulo Lamas92% (12)
- Sistema de ControleDocumento10 páginasSistema de ControleMarcio Mian0% (1)
- Aula 02Documento15 páginasAula 02Mir4 BritoAinda não há avaliações
- Lista 1Documento3 páginasLista 1luis volpeAinda não há avaliações
- Trabalho de Modelagem de Sistemas PDFDocumento7 páginasTrabalho de Modelagem de Sistemas PDFViniciusAinda não há avaliações
- Aplicação Laplace Exercicios ResolDocumento11 páginasAplicação Laplace Exercicios ResolAlan Kardec Barroso DiasAinda não há avaliações
- Circuitos de Primeira OrdemDocumento14 páginasCircuitos de Primeira Ordemwenderguilherme05Ainda não há avaliações
- Lista 8 2021Documento3 páginasLista 8 2021Fábio doPneuAinda não há avaliações
- Calculo Modulo1Documento18 páginasCalculo Modulo1gabrielfAinda não há avaliações
- LaplaceDocumento18 páginasLaplaceAlexandre SaviniAinda não há avaliações
- Lista 3Documento3 páginasLista 3Pedro MartinsAinda não há avaliações
- Exercícios1 MATLABDocumento4 páginasExercícios1 MATLABAbel FelipeAinda não há avaliações
- Lista Exercicio CompletaDocumento17 páginasLista Exercicio CompletaVinícius Moreira SouzaAinda não há avaliações
- EM707 Lista 02 2s 2021Documento3 páginasEM707 Lista 02 2s 2021Roger LeiteAinda não há avaliações
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 páginas5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasAinda não há avaliações
- Tutorial 5 - Resposta de Sistemas A Entradas Do Tipo Impulso e Degrau UnitárioDocumento10 páginasTutorial 5 - Resposta de Sistemas A Entradas Do Tipo Impulso e Degrau UnitárioGabriel AngeloAinda não há avaliações
- Sistema de Primeira e Segunda Ordem - 07 PDFDocumento10 páginasSistema de Primeira e Segunda Ordem - 07 PDFRafaella B. C. RafaAinda não há avaliações
- Aula 3 Função de TransferenciaDocumento17 páginasAula 3 Função de TransferenciaFranz C SchreiberAinda não há avaliações
- Lista 1Documento10 páginasLista 1Davi JordãoAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Gabarito Lista de Controle ResolvidaDocumento10 páginasGabarito Lista de Controle ResolvidaSalatyel FellipeAinda não há avaliações
- Cobenge 2001 MotorDocumento10 páginasCobenge 2001 MotorRenato OliveiraAinda não há avaliações
- Primeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Documento5 páginasPrimeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Rodrigo LimaAinda não há avaliações
- Aula2 FT DiagBlocosDocumento53 páginasAula2 FT DiagBlocosbrineniziiziAinda não há avaliações
- Aula 1Documento15 páginasAula 1Gabriela AlcantaraAinda não há avaliações
- Nota de Aula 9 - Aplicacoes EDO 2ordemDocumento10 páginasNota de Aula 9 - Aplicacoes EDO 2ordemCélio UchôaAinda não há avaliações
- AplDocumento8 páginasAplmgteslaAinda não há avaliações
- 1 Transf LaplaceDocumento9 páginas1 Transf LaplaceDenise PereiraAinda não há avaliações
- ED2 ASDL Sistemas1aOrdemDocumento6 páginasED2 ASDL Sistemas1aOrdemArthur Vieira de Assis MoreiraAinda não há avaliações
- LAB7 - Freq PrópriaDocumento5 páginasLAB7 - Freq PrópriaAllexsandro AraújoAinda não há avaliações
- Laboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDocumento16 páginasLaboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDavid AlexanderAinda não há avaliações
- Análise de Sistemas de Controle PDFDocumento23 páginasAnálise de Sistemas de Controle PDFLuiz Carlos da SilvaAinda não há avaliações
- Lista 2 - 2018Documento5 páginasLista 2 - 2018Alessandro JesusAinda não há avaliações
- Material ProfessorDocumento17 páginasMaterial ProfessorDouglas LourençoAinda não há avaliações
- Atividade de Modelagem Sistemas Dinamicos - ResolvidoDocumento4 páginasAtividade de Modelagem Sistemas Dinamicos - ResolvidoCleiton SouzaAinda não há avaliações
- Resposta Impulsiva e ConvoluçãoDocumento10 páginasResposta Impulsiva e ConvoluçãoGuilherme Fróes SilvaAinda não há avaliações
- Tutorial 4 - Resposta Livre de Sistemas DinâmicosDocumento9 páginasTutorial 4 - Resposta Livre de Sistemas DinâmicosGabriel AngeloAinda não há avaliações
- Aula 16 - Oscilações MecânicasDocumento6 páginasAula 16 - Oscilações MecânicassereiamilenyengAinda não há avaliações
- Prova3 2018.2Documento3 páginasProva3 2018.2Icaro MoraisAinda não há avaliações
- 05 AulaDocumento6 páginas05 AulaestoicaaescolaAinda não há avaliações
- Resposta Dinâmica de Sistemas Lineares Controle Essencial Capítulo 6Documento33 páginasResposta Dinâmica de Sistemas Lineares Controle Essencial Capítulo 6Hamilton NettoAinda não há avaliações
- Aula 8Documento20 páginasAula 8Ana Beatriz BrazAinda não há avaliações
- Guia P31Documento2 páginasGuia P31Pablo Enrique Fuentes UribeAinda não há avaliações
- Modelação e Simulação: V - de Forma Simplificada, Um Altifalante Consiste NumaDocumento5 páginasModelação e Simulação: V - de Forma Simplificada, Um Altifalante Consiste NumaFrancisco RosaAinda não há avaliações
- Lista LaplaceDocumento2 páginasLista Laplacemarcella4idalyneAinda não há avaliações
- Exercicios 09Documento5 páginasExercicios 09matheuslisarteAinda não há avaliações
- Exp 8-Circuitos RLC Com Corrente Alternada Ressonancia e Filtros Passa-Banda e Rejeita-BandaDocumento20 páginasExp 8-Circuitos RLC Com Corrente Alternada Ressonancia e Filtros Passa-Banda e Rejeita-BandaZalAinda não há avaliações
- Modelagem de Sistemas: ConteúdosDocumento45 páginasModelagem de Sistemas: ConteúdosLeo WilliamAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Transformada de Laplace - Circuitos2Documento23 páginasTransformada de Laplace - Circuitos2Pantoja lopesAinda não há avaliações
- Controle II Aula 1bDocumento8 páginasControle II Aula 1bLUCAS GABRIEL SILVA BARRA CORREAAinda não há avaliações
- VIBRAÇÕES MECÂNICAS Questao 4Documento5 páginasVIBRAÇÕES MECÂNICAS Questao 4Vitor NovaesAinda não há avaliações
- AP3 Artigo1Documento4 páginasAP3 Artigo1JOERDSON TIAGO BATISTA DA SILVAAinda não há avaliações
- Equações e Função TransferenciaDocumento32 páginasEquações e Função TransferenciaStefanoM.ColucciniAinda não há avaliações
- Lista 02Documento2 páginasLista 02Daltro OliveiraAinda não há avaliações
- Sistemas de 1 e 2 OrdemDocumento25 páginasSistemas de 1 e 2 OrdemglaucochacalAinda não há avaliações
- Manual Compressor Kaeser CSD-60Documento150 páginasManual Compressor Kaeser CSD-60lucas.queiroz0493Ainda não há avaliações
- Lista de Exercícios - Linhas de TransmissãoDocumento2 páginasLista de Exercícios - Linhas de TransmissãoRafael Rorato0% (1)
- Cruzada FisicaDocumento17 páginasCruzada FisicaRAFAELA FERNANDES DE ARAUJOAinda não há avaliações
- Eletricista de Manutencao Equipamentos e Dispositivos de Media e Baixa Tensao PromimpDocumento45 páginasEletricista de Manutencao Equipamentos e Dispositivos de Media e Baixa Tensao PromimpJardel JuniorAinda não há avaliações
- Lista de Exercícios Termoquímica PremedDocumento7 páginasLista de Exercícios Termoquímica Premedyasminviana.advAinda não há avaliações
- Elementos Polias CorreiasDocumento44 páginasElementos Polias CorreiasCamila dos Reis PereiraAinda não há avaliações
- 577a9eacc2f68 PDFDocumento10 páginas577a9eacc2f68 PDFEBookexcelAinda não há avaliações
- Lista Ciclo de RefrigeraçãoDocumento4 páginasLista Ciclo de RefrigeraçãoAtila MagroAinda não há avaliações
- Cogeração - Trabalho Professor WilliamDocumento11 páginasCogeração - Trabalho Professor WilliamOrlando SantosAinda não há avaliações
- Experiencia Tubo de PitotDocumento8 páginasExperiencia Tubo de Pitotnion maronAinda não há avaliações
- Abnt NBR 15129 2004 Luminarias para Iluminaao Publica - CompressDocumento14 páginasAbnt NBR 15129 2004 Luminarias para Iluminaao Publica - CompressElmo PiquiáAinda não há avaliações
- Radiação e Irradiância. Painéis FotovoltaicosDocumento22 páginasRadiação e Irradiância. Painéis FotovoltaicosJuresvalda MarcelaAinda não há avaliações
- Trabalho Sobre Sensores de Nível para ÁguaDocumento3 páginasTrabalho Sobre Sensores de Nível para ÁguaEmerson HermesAinda não há avaliações
- Medidas Electricas 5Documento9 páginasMedidas Electricas 5Ricardo CruzAinda não há avaliações
- Memoria DescritivaDocumento36 páginasMemoria DescritivaMax Lenin Ticona CondoriAinda não há avaliações
- Lista de Exercícios 3.01Documento2 páginasLista de Exercícios 3.01Ângelo Fred TorresAinda não há avaliações
- I4320004 - Conexão de Centrais Geradoras - CELESCDocumento36 páginasI4320004 - Conexão de Centrais Geradoras - CELESCthiagu.lAinda não há avaliações
- MS - Aula Prática 04 - 2015 - 1Documento4 páginasMS - Aula Prática 04 - 2015 - 1João Paulo Souza DiasAinda não há avaliações
- Ficha - Trabalho - 2 - Gráficos Posição-Tempo PDFDocumento1 páginaFicha - Trabalho - 2 - Gráficos Posição-Tempo PDFXAinda não há avaliações
- Aula Associação de ResistoresDocumento4 páginasAula Associação de ResistoresDanielle Correa lanaAinda não há avaliações
- Curto Circuito SiemensDocumento68 páginasCurto Circuito SiemensCarlos WingertAinda não há avaliações
- Bambozzi Bambina Tig 300Documento8 páginasBambozzi Bambina Tig 300Antonio MarcosAinda não há avaliações
- Tópico 3 Manometria EXERCÍCIOS RESOLVIDOS 2020 I TesteDocumento12 páginasTópico 3 Manometria EXERCÍCIOS RESOLVIDOS 2020 I TesteJanyson Karllos100% (2)
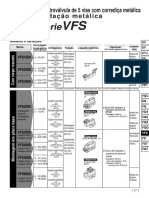
- VFS (Po)Documento104 páginasVFS (Po)BatistaAinda não há avaliações
- 02 Atividade Do 3ºbimestreDocumento2 páginas02 Atividade Do 3ºbimestreAnne Vitória Medeiros 2 BAinda não há avaliações
- Projeto EQ641 Fenômenos de Transporte IIDocumento29 páginasProjeto EQ641 Fenômenos de Transporte IIGabriel S. Gusmão (Freddie)Ainda não há avaliações
- Trabalho de Conclusão de Curso, Resultados EsperadosDocumento20 páginasTrabalho de Conclusão de Curso, Resultados Esperadosvictorconta2.2Ainda não há avaliações
- PRH 13 Termodinamica Aula 07 Equacoes de EstadoDocumento32 páginasPRH 13 Termodinamica Aula 07 Equacoes de Estadodai_anefAinda não há avaliações
- Memorial Descritivo Elétrico - Capela MortuáriaDocumento7 páginasMemorial Descritivo Elétrico - Capela MortuáriaRobson SantosAinda não há avaliações