Você também pode gostar
- Manual Cme 300 HSDocumento122 páginasManual Cme 300 HSAndré BastosAinda não há avaliações
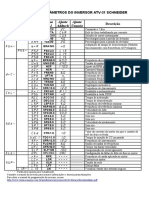
- Parametrização Atv 31 21-05-08Documento1 páginaParametrização Atv 31 21-05-08Edson Alessandro CaramiteAinda não há avaliações
- 128 Kit VVVF ModernizacaoDocumento2 páginas128 Kit VVVF ModernizacaoElenilzaSantosAinda não há avaliações
- 16 04 28 Inversor CFW08Documento1 página16 04 28 Inversor CFW08Melanie SanchezAinda não há avaliações
- Confiance 222 Serial - Poço Digital - Kit Pré Carga-3034032Documento23 páginasConfiance 222 Serial - Poço Digital - Kit Pré Carga-3034032AlbertoAinda não há avaliações
- 1380 SurDocumento28 páginas1380 Surwilson silveiraAinda não há avaliações
- CDI-00-109 - R14 - Circuito - Eletrico - Padrao - GENIUS - COM - IRGE-V3F - CHAMADA - SERIAL - PLACA - CABINA - IVADocumento10 páginasCDI-00-109 - R14 - Circuito - Eletrico - Padrao - GENIUS - COM - IRGE-V3F - CHAMADA - SERIAL - PLACA - CABINA - IVAHenrique MeloAinda não há avaliações
- Guia Essencial Telemecanique PDFDocumento32 páginasGuia Essencial Telemecanique PDFLuis GomesAinda não há avaliações
- Jumper Ferramenta - Procedimento de Utilização - 12900Documento20 páginasJumper Ferramenta - Procedimento de Utilização - 12900agnaldo100% (1)
- Cti - 071 Ajuste Do Inversor de Porta TelemecaniqueDocumento2 páginasCti - 071 Ajuste Do Inversor de Porta TelemecaniqueRenato FreitasAinda não há avaliações
- Apostila Tecnologias Infolev Aplicacoes Funcionamento Diagnósticos de Falhas e Solucoes R00-CompactadoDocumento38 páginasApostila Tecnologias Infolev Aplicacoes Funcionamento Diagnósticos de Falhas e Solucoes R00-CompactadoPedro Reis100% (1)
- IT Excel FV Desnivelanento FrequenteDocumento9 páginasIT Excel FV Desnivelanento FrequenteLucas Andrade100% (1)
- MCP8 - Telas Do TLSDocumento1 páginaMCP8 - Telas Do TLSEdson Alessandro CaramiteAinda não há avaliações
- Schindler Impulsomatic Mobile Manual Prático PDFDocumento120 páginasSchindler Impulsomatic Mobile Manual Prático PDFh6nvqr7xycAinda não há avaliações
- CNF Ver.14 222 SDocumento47 páginasCNF Ver.14 222 SAlbertoAinda não há avaliações
- Thyssen Libreacion de Modulo Mcinv5ls PortuguesDocumento8 páginasThyssen Libreacion de Modulo Mcinv5ls PortuguesOscar Cova GonzalezAinda não há avaliações
- Kits Proteções Máquina LimitadorDocumento15 páginasKits Proteções Máquina LimitadorArthur Ferino100% (1)
- CDI-00-192 Circuito Eletrico Genius Padrao MONTELE COM IRGE-V3F 2 OP VVVF R08.dftDocumento9 páginasCDI-00-192 Circuito Eletrico Genius Padrao MONTELE COM IRGE-V3F 2 OP VVVF R08.dftDaianeAinda não há avaliações
- Cópia de Parametros CFW100Documento9 páginasCópia de Parametros CFW100Luiz Geniseli Fernanda Oliveira100% (1)
- P-45391 ArtamaDocumento26 páginasP-45391 Artamaantonio carlos100% (1)
- Guia Rapido de Instalacao Dos Comandos Genius 1484224295Documento40 páginasGuia Rapido de Instalacao Dos Comandos Genius 1484224295Filipe LinoAinda não há avaliações
- Plugado NewWayDocumento11 páginasPlugado NewWaywilliamcscpsAinda não há avaliações
- Manual Pesador de Carga PDFDocumento8 páginasManual Pesador de Carga PDFViniciusAinda não há avaliações
- Manual Da Placa Seletora Genius Flash 1482330239Documento32 páginasManual Da Placa Seletora Genius Flash 1482330239Filipe LinoAinda não há avaliações
- Infodica Inversores cfw500 Comandos Infolev 1652873477 PDFDocumento8 páginasInfodica Inversores cfw500 Comandos Infolev 1652873477 PDFCristiano Marafiga NardoAinda não há avaliações
- Manual de Campo MX GC PT Compress 2Documento113 páginasManual de Campo MX GC PT Compress 2lucasaragao25100% (1)
- SÉRIE CS - AZ - Rev020412 PDFDocumento5 páginasSÉRIE CS - AZ - Rev020412 PDFJose Braga AlbuquerqueAinda não há avaliações
- Manual Prático Do TécnicoDocumento501 páginasManual Prático Do TécnicoDavid Santos100% (1)
- Inversor Yaskawa G5 Inversor Yaskawa L7Documento7 páginasInversor Yaskawa G5 Inversor Yaskawa L7Felipe BritoAinda não há avaliações
- Lista de Parâmetros Inversor Vacon NXP Motor PM - CLIENTEDocumento4 páginasLista de Parâmetros Inversor Vacon NXP Motor PM - CLIENTEcesar oliveiraAinda não há avaliações
- Esquemas Elétricos VVF Serial 3 PDFDocumento28 páginasEsquemas Elétricos VVF Serial 3 PDFwilliamcscpsAinda não há avaliações
- Miconic e Completo Manual Instalação PDFDocumento1 páginaMiconic e Completo Manual Instalação PDFmaxAinda não há avaliações
- Atlas Schindler 1Documento43 páginasAtlas Schindler 1Jose VargasAinda não há avaliações
- Bo75u Selectron CC Manual Rev1Documento43 páginasBo75u Selectron CC Manual Rev1Erick de SouzaAinda não há avaliações
- Esq Ortobras VTC 02 PARADAS Plataforma Com Placa GrandeDocumento1 páginaEsq Ortobras VTC 02 PARADAS Plataforma Com Placa Grandecley marcosAinda não há avaliações
- Manual Genesis-V5.1Documento10 páginasManual Genesis-V5.1Jefferson LuizAinda não há avaliações
- Manual de AjustesDocumento115 páginasManual de AjustesCaetano de Almeida bordadagua100% (1)
- Diagrama Eletrico CV NMT 16 Ortobras-1Documento12 páginasDiagrama Eletrico CV NMT 16 Ortobras-1Vinicius100% (1)
- Escada Sigma - Elétrica PDFDocumento32 páginasEscada Sigma - Elétrica PDFAndre Louis GrangeonAinda não há avaliações
- Infolev Ifl 750Documento54 páginasInfolev Ifl 750Junior Braga100% (1)
- Falhas Na NceDocumento6 páginasFalhas Na NceEdson Alessandro CaramiteAinda não há avaliações
- Diagnóstico de Falhas Comando ScanchipDocumento1 páginaDiagnóstico de Falhas Comando ScanchipSergio Daniel Noguera GómezAinda não há avaliações
- INV Porta CFW10-1 PDFDocumento1 páginaINV Porta CFW10-1 PDFAngelo TeixeiraAinda não há avaliações
- (VEGA PT) LCD520530 Rev.2Documento12 páginas(VEGA PT) LCD520530 Rev.2AlessandroAinda não há avaliações
- Manutencao Preventiva Mensal Primac ElevadoresDocumento7 páginasManutencao Preventiva Mensal Primac ElevadoresAndre Louis GrangeonAinda não há avaliações
- CONTROLADOR DE ELEVADORES. Programável CEA15. Manual Do Usuário PDFDocumento74 páginasCONTROLADOR DE ELEVADORES. Programável CEA15. Manual Do Usuário PDFLeandro Vial100% (2)
- MC40VF 380VDocumento15 páginasMC40VF 380VzanildoAinda não há avaliações
- Manual Da Máquina GTW2Documento24 páginasManual Da Máquina GTW2Ralffe RosadoAinda não há avaliações
- Addtech MCX Versão 1.2Documento16 páginasAddtech MCX Versão 1.2Nixon Erick100% (1)
- CTI359Ind0-Uso Do Gabarito de Ajuste em Portas de Pavimento IntegradoDocumento15 páginasCTI359Ind0-Uso Do Gabarito de Ajuste em Portas de Pavimento IntegradoSaimon Vargas SaimonAinda não há avaliações
- CDI-00-295 Troca Do Inversor CFW09 Por CFW500-1Documento9 páginasCDI-00-295 Troca Do Inversor CFW09 Por CFW500-1Henrique MeloAinda não há avaliações
- STVF7 SERIESS ELEVATOR MANUAL Ver2 201207 20 1 21 30 PDFDocumento10 páginasSTVF7 SERIESS ELEVATOR MANUAL Ver2 201207 20 1 21 30 PDFJms QuinteroAinda não há avaliações
- TKAW BA ATR DAF270 2012 09 PTDocumento124 páginasTKAW BA ATR DAF270 2012 09 PTjamesAinda não há avaliações
- Freio Duplo MeacDocumento15 páginasFreio Duplo MeacBruno Vanzella MoreiraAinda não há avaliações
- At120 - Porta Prima PaxDocumento12 páginasAt120 - Porta Prima PaxzanildoAinda não há avaliações
- Manual OriginalLCB1Documento42 páginasManual OriginalLCB1mega variedadesAinda não há avaliações
- AC02 - MANUAL DE INSTALAÇÃO-Rev9Documento36 páginasAC02 - MANUAL DE INSTALAÇÃO-Rev9Antonioli JuniorAinda não há avaliações
- 9.1 - Apostila Do Aluno - ADV-DP LCB2 RevDocumento29 páginas9.1 - Apostila Do Aluno - ADV-DP LCB2 RevMiura100% (1)
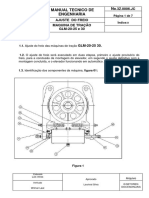
- 3Z0006JC - Ajuste Do Freio Máquina GLM-20, 25 e 30Documento7 páginas3Z0006JC - Ajuste Do Freio Máquina GLM-20, 25 e 30Douglas SalazarAinda não há avaliações
- Configuracoes Simplify3d 1Documento2 páginasConfiguracoes Simplify3d 1Evandro PavesiAinda não há avaliações
- Tutorial SLIC3RDocumento8 páginasTutorial SLIC3RbrunospaAinda não há avaliações
- Manual Repetier PT PDFDocumento13 páginasManual Repetier PT PDFLuiz Henrique ZeferinoAinda não há avaliações
- Configuracoes Repetier HostDocumento3 páginasConfiguracoes Repetier HostEvandro PavesiAinda não há avaliações
- Configuracoes Simplify3dDocumento1 páginaConfiguracoes Simplify3dEvandro PavesiAinda não há avaliações
- 3ADW000404R0100 DCS800 - Quick Guide - Edsp - A PDFDocumento100 páginas3ADW000404R0100 DCS800 - Quick Guide - Edsp - A PDFEvandro PavesiAinda não há avaliações
- 3ADW000404R0100 DCS800 - Quick Guide - Edsp - A PDFDocumento100 páginas3ADW000404R0100 DCS800 - Quick Guide - Edsp - A PDFEvandro PavesiAinda não há avaliações
- WEG HGF Motor Trifasico de Inducao 50029374 Brochure Portuguese WebDocumento8 páginasWEG HGF Motor Trifasico de Inducao 50029374 Brochure Portuguese WebBrender VictorAinda não há avaliações
- Comissionamento Rápido MM 420 PDFDocumento4 páginasComissionamento Rápido MM 420 PDFEvandro PavesiAinda não há avaliações
- 3RW44 - Manual - Port - Versà o DS1 - 10 2010Documento264 páginas3RW44 - Manual - Port - Versà o DS1 - 10 2010andrelm2011Ainda não há avaliações
- WEG HGF Motor Trifasico de Inducao 50029374 Brochure Portuguese WebDocumento8 páginasWEG HGF Motor Trifasico de Inducao 50029374 Brochure Portuguese WebBrender VictorAinda não há avaliações
- Pid - Malha FechadaDocumento11 páginasPid - Malha FechadamaiconsaturnoAinda não há avaliações
- Siemens Micromaster 430 COM PT 0805Documento51 páginasSiemens Micromaster 430 COM PT 0805Navegador9100% (4)
- Micrmoaster11 Blocos Livres No MM420 (Port)Documento8 páginasMicrmoaster11 Blocos Livres No MM420 (Port)BatchmanAinda não há avaliações
- Análise Termográfica RELATÓRIO TÉCNICO 0714Documento22 páginasAnálise Termográfica RELATÓRIO TÉCNICO 0714Evandro PavesiAinda não há avaliações
- Viewport PDFDocumento2 páginasViewport PDFEvandro PavesiAinda não há avaliações
- CTC m5 v3t PDFDocumento64 páginasCTC m5 v3t PDFEvandro PavesiAinda não há avaliações
- CTC m5 v3t PDFDocumento64 páginasCTC m5 v3t PDFEvandro PavesiAinda não há avaliações
- Sectron - Manual Barreira 94 Ps01340v02Documento13 páginasSectron - Manual Barreira 94 Ps01340v02Evandro PavesiAinda não há avaliações
- Conector de Placa de Circuito Impresso - MSTB 2,5/ 4-STZF-5,08 - 1810451Documento5 páginasConector de Placa de Circuito Impresso - MSTB 2,5/ 4-STZF-5,08 - 1810451Evandro PavesiAinda não há avaliações
- Relatorio 2003207512Documento6 páginasRelatorio 2003207512Evandro PavesiAinda não há avaliações
- 59cd1554015b1 Descricao e Operacao Sistema de PartidaDocumento1 página59cd1554015b1 Descricao e Operacao Sistema de PartidaEvandro PavesiAinda não há avaliações
- V1a - Manual Sensor IndutivoDocumento2 páginasV1a - Manual Sensor IndutivoadrbimAinda não há avaliações
- Aula 13 - Módulos de Suporte À CPUDocumento32 páginasAula 13 - Módulos de Suporte À CPUMarcosAinda não há avaliações
- Manual de Instrucoes Relatus 4 Rev2Documento12 páginasManual de Instrucoes Relatus 4 Rev2Sergio F de A Cunha100% (1)
- Fluxo Engele - Unime ItabunaDocumento1 páginaFluxo Engele - Unime ItabunaAndré SantosAinda não há avaliações
- Diagrama Unifilar Edifício AtlânticaDocumento1 páginaDiagrama Unifilar Edifício AtlânticaDuda CorrêaAinda não há avaliações
- Edital Chamada Pública Procel Reluz 01 - 2019 - 05062019Documento239 páginasEdital Chamada Pública Procel Reluz 01 - 2019 - 05062019basoAinda não há avaliações
- AdamDocumento35 páginasAdamRafael FloresAinda não há avaliações
- Relatório Sensor InfravermelhoDocumento4 páginasRelatório Sensor InfravermelhoIgor BarbosaAinda não há avaliações
- Sel 2505Documento16 páginasSel 2505Daniel RoyoAinda não há avaliações
- As2 PcetefpccDocumento1 páginaAs2 PcetefpccOtis ZefaniasAinda não há avaliações
- 100 CV 2 Polos Gear Box 380 660vDocumento1 página100 CV 2 Polos Gear Box 380 660vartpressclarinamotoresAinda não há avaliações
- Lista de Exercícios Geradores e Receptores PDFDocumento8 páginasLista de Exercícios Geradores e Receptores PDFLuiz ClaudioAinda não há avaliações
- Engenharia Elétrica Com Ênfase em Sistema de AutomaçãoDocumento238 páginasEngenharia Elétrica Com Ênfase em Sistema de AutomaçãoThiago PimentaAinda não há avaliações
- Tabela de Preços Julho 2020 PDFDocumento2 páginasTabela de Preços Julho 2020 PDFMayara GouveiaAinda não há avaliações
- Sp-6000 Rodoviário Manual de Instalação - PDFDocumento1 páginaSp-6000 Rodoviário Manual de Instalação - PDFBruno LucianoAinda não há avaliações
- Introdução Ao F.E.M.MDocumento33 páginasIntrodução Ao F.E.M.Mdaniel SilvaAinda não há avaliações
- Artigo - Luminotécnica - Gabriel Gontijo SilvaDocumento5 páginasArtigo - Luminotécnica - Gabriel Gontijo SilvaGabriel GontijoAinda não há avaliações
- 2.6 - Manual de OperaçãoDocumento284 páginas2.6 - Manual de OperaçãoBrunno Antonio Wiler S. Da Silva100% (1)
- URPE7104TV10.31r03 - Manual de OperaçãoDocumento53 páginasURPE7104TV10.31r03 - Manual de OperaçãoWilliam Silva100% (6)
- Aula 04 - Acionamento de Motores ElétricosDocumento8 páginasAula 04 - Acionamento de Motores ElétricosDouglas Gomes100% (17)
- Edital 01 2024 PPgEEC Mestrado 2024.1Documento28 páginasEdital 01 2024 PPgEEC Mestrado 2024.1pietroaalesAinda não há avaliações
- ManualDocumento8 páginasManualoliveiraweltonAinda não há avaliações
- Lista de Peças Maquina RevisoraDocumento1 páginaLista de Peças Maquina RevisoraemanuelAinda não há avaliações
- Ajuste 50 51 No Rele Areva Amaury Rafael LopesDocumento12 páginasAjuste 50 51 No Rele Areva Amaury Rafael LopesAmaury Rios100% (1)
- Lista de ExercíciosDocumento7 páginasLista de ExercíciosSamara Lima100% (1)
- Nte G 012 2Documento34 páginasNte G 012 2Ademir AlmeidaAinda não há avaliações
- CNC Ge Fanuc 63525 PortuguesDocumento152 páginasCNC Ge Fanuc 63525 PortuguesEduardo Bueno Lemes60% (5)
- Fornecimento de Energia Elétrica A Edificações de Uso Coletivo - SM01.00-00.002 110209 20090814Documento120 páginasFornecimento de Energia Elétrica A Edificações de Uso Coletivo - SM01.00-00.002 110209 20090814dononoAinda não há avaliações
- MaquinasDocumento110 páginasMaquinascarioca 007Ainda não há avaliações
- Calha Parshall Incontrol PDFDocumento4 páginasCalha Parshall Incontrol PDFLuciangelo Rossi PeloggiaAinda não há avaliações