Você também pode gostar
- Escala de Vulnerabilidade ... Stresse No Trabalho (Documento19 páginasEscala de Vulnerabilidade ... Stresse No Trabalho (Lenisa Veiga100% (1)
- Topografia Aplicada À Engenharia CivilDocumento168 páginasTopografia Aplicada À Engenharia CivilMarcos SouzaAinda não há avaliações
- Ebook Projeto RodoviarioDocumento174 páginasEbook Projeto RodoviarioJean PierreAinda não há avaliações
- EstradasDocumento40 páginasEstradasMara Cristina de AlmeidaAinda não há avaliações
- Exercicios ProjetosDocumento2 páginasExercicios ProjetosRicardo PereiraAinda não há avaliações
- Aula 04 - Projetos de Estradas (Curvas Horizontais)Documento48 páginasAula 04 - Projetos de Estradas (Curvas Horizontais)adjailson jhonnyAinda não há avaliações
- Poli Go NaçãoDocumento22 páginasPoli Go NaçãoDHEIA CHRISTHINNE DA COSTA DE ASSUNÇÃOAinda não há avaliações
- Aula3 Projeto Geometrico de Estradas by Tadao PDFDocumento70 páginasAula3 Projeto Geometrico de Estradas by Tadao PDFWilianAlvesAinda não há avaliações
- Cartilha de Instrucoes Tecnicas de Engenharia e ArquiteturaDocumento38 páginasCartilha de Instrucoes Tecnicas de Engenharia e ArquiteturaAbrao Morais100% (1)
- Apostila Topografia - Tec - 2011Documento81 páginasApostila Topografia - Tec - 2011End FernandesAinda não há avaliações
- Introdução Ao Estudo de Estradas PDFDocumento43 páginasIntrodução Ao Estudo de Estradas PDFRobson IrineuAinda não há avaliações
- Curso de TerraplenagemDocumento30 páginasCurso de TerraplenagemJanine BmAinda não há avaliações
- Livro Estradas - Volume 01 - Rodolfo FrançaDocumento53 páginasLivro Estradas - Volume 01 - Rodolfo FrançaRODOLFO100% (1)
- Aula 06 - Elementos e Características Básicas de Projeto Geómetrico (1640) PDFDocumento72 páginasAula 06 - Elementos e Características Básicas de Projeto Geómetrico (1640) PDFLucy TavaresAinda não há avaliações
- Apostila 1 Introducao-e-Estudo ProjetoDocumento40 páginasApostila 1 Introducao-e-Estudo ProjetoWitalo Dourado100% (1)
- Geometria de ViasDocumento20 páginasGeometria de ViasLarissaPelicanoJotabradoAinda não há avaliações
- Aula 5 - Levantamento Topográfico - PlanimetriaDocumento34 páginasAula 5 - Levantamento Topográfico - PlanimetriaRodryAinda não há avaliações
- Noções de Topografia para Projetos Rodoviários: Capitulo 01Documento135 páginasNoções de Topografia para Projetos Rodoviários: Capitulo 01Nathalie Latini de CarvalhoAinda não há avaliações
- Aula 1 - O Traçado de Uma EstradaDocumento36 páginasAula 1 - O Traçado de Uma EstradaIdo ManoelAinda não há avaliações
- Diagrama de Massas - Diagrama de BrucknerDocumento9 páginasDiagrama de Massas - Diagrama de BrucknerMayra Alejandra SuárezAinda não há avaliações
- Notas Sobre AgrimensuraDocumento55 páginasNotas Sobre AgrimensuraDiego ColaresAinda não há avaliações
- 03 Curva Horizontal CircularDocumento6 páginas03 Curva Horizontal CircularGleison CrispinAinda não há avaliações
- Aula 05 - Projetos de Estradas (Terraplenagem)Documento45 páginasAula 05 - Projetos de Estradas (Terraplenagem)adjailson jhonnyAinda não há avaliações
- As Grandes Obras de Engenhjaria CivilDocumento48 páginasAs Grandes Obras de Engenhjaria CivilAndreia KerlanAinda não há avaliações
- Aula 12 - Pavimentação e ExercíciosDocumento37 páginasAula 12 - Pavimentação e ExercíciosBrunna Karla100% (1)
- Estudos para Projecto de Estrada2 PDFDocumento13 páginasEstudos para Projecto de Estrada2 PDFI. Agostinho100% (1)
- AULA 02 - TopografiaDocumento27 páginasAULA 02 - TopografiaVagner DiasAinda não há avaliações
- Curvas Circulares - Prof HALANDocumento9 páginasCurvas Circulares - Prof HALANYgor DanielAinda não há avaliações
- Aula 1 - Classes de RodoviasDocumento41 páginasAula 1 - Classes de RodoviasRicardo Junio0% (1)
- Lista de Exercicios Curvas Horizontais e Verticasis 2a. Bimestre EstradasDocumento1 páginaLista de Exercicios Curvas Horizontais e Verticasis 2a. Bimestre EstradasWalker WegnerAinda não há avaliações
- Fundamentos Da Higiene OcupacionalDocumento32 páginasFundamentos Da Higiene OcupacionaljheimissonAinda não há avaliações
- Curva Circular SimplesDocumento36 páginasCurva Circular SimplesLuis Sergio Oliveira100% (1)
- Aula - UrbanismoDocumento51 páginasAula - UrbanismoGláuber LucasAinda não há avaliações
- Aulas - 1º Unidade - Introdução Ao Estudo Das Estradas Até 13-03-2017Documento127 páginasAulas - 1º Unidade - Introdução Ao Estudo Das Estradas Até 13-03-2017Icaro AlmeidaAinda não há avaliações
- Apostila EstradasDocumento38 páginasApostila EstradasIslenegomesAinda não há avaliações
- Estradas - 2 ParteDocumento16 páginasEstradas - 2 Parteweezylaras100% (1)
- Aula Superelevacao SuperlarguraDocumento48 páginasAula Superelevacao SuperlarguraCairo BragaAinda não há avaliações
- 4-Superelevacao e SuperlarguraDocumento49 páginas4-Superelevacao e SuperlargurasayuAinda não há avaliações
- Estradas - Curva Circular SimplesDocumento16 páginasEstradas - Curva Circular SimplesAna Laura LourençoAinda não há avaliações
- Slides Projeto Geométrico de Estradas - Claudia DazaDocumento64 páginasSlides Projeto Geométrico de Estradas - Claudia DazaCarol BarrosAinda não há avaliações
- Levantamentos Topográficos - Parte 1 PDFDocumento176 páginasLevantamentos Topográficos - Parte 1 PDFVitor GuedesAinda não há avaliações
- Ajuste Do Excesso de Ar Na Queima Do Bagaço de CanaDocumento1 páginaAjuste Do Excesso de Ar Na Queima Do Bagaço de CanaAnonymous QY7Iu8fBAinda não há avaliações
- Análise de confiabilidade estrutural via método SORM DG: análise de confiabilidade por meio de curvaturas principais de superfícies de estado limiteNo EverandAnálise de confiabilidade estrutural via método SORM DG: análise de confiabilidade por meio de curvaturas principais de superfícies de estado limiteAinda não há avaliações
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Documento1 páginaDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroAinda não há avaliações
- Resumo Prova de EstradasDocumento66 páginasResumo Prova de EstradasjoaopauloAinda não há avaliações
- Aula 5Documento37 páginasAula 5Dennis Bek0% (1)
- Tipos de Patologia Do Asfalto em RodoviasDocumento1 páginaTipos de Patologia Do Asfalto em RodoviasMaylanneAinda não há avaliações
- Trabalho Equipamentos TopográficosDocumento17 páginasTrabalho Equipamentos TopográficosWill Turner0% (1)
- Projecto de Vias de Comunicação 1Documento17 páginasProjecto de Vias de Comunicação 1Peterson DomingosAinda não há avaliações
- Resumão (Estrada) - Prova 02 de Abril 2015 Rodovia de Acesso Controlado Tráfego PDFDocumento1 páginaResumão (Estrada) - Prova 02 de Abril 2015 Rodovia de Acesso Controlado Tráfego PDFCaio BarrosoAinda não há avaliações
- Projeto de Estradas - Aula 02 - ESTUDO PARA CONSTRUÇÃO DE ESTRADAS PDFDocumento43 páginasProjeto de Estradas - Aula 02 - ESTUDO PARA CONSTRUÇÃO DE ESTRADAS PDFBreno AugustoAinda não há avaliações
- Projeto Geometrico de Rodovias - Parte I PDFDocumento70 páginasProjeto Geometrico de Rodovias - Parte I PDFFrancielen BillsAinda não há avaliações
- Projeto Geometrico de Rodovias Fases de ImplantacaoDocumento32 páginasProjeto Geometrico de Rodovias Fases de ImplantacaoRicardo RibeiroAinda não há avaliações
- Cálculo Da Superlargura Da Faixa de Trânsito de Uma Curva CircularDocumento3 páginasCálculo Da Superlargura Da Faixa de Trânsito de Uma Curva CircularGonçalo BejaAinda não há avaliações
- EXTRA5Documento22 páginasEXTRA5Lívia MeloAinda não há avaliações
- Aula 1 - O Traçado de Uma EstradaDocumento39 páginasAula 1 - O Traçado de Uma EstradaMario BarrazaAinda não há avaliações
- 5 Estradas1 Superelevação Rev0 PDFDocumento30 páginas5 Estradas1 Superelevação Rev0 PDFMarcelo AulerAinda não há avaliações
- 1 - Contagem de Tráfego - Estrada e Transportes IDocumento21 páginas1 - Contagem de Tráfego - Estrada e Transportes IandrelpfdAinda não há avaliações
- Projeto de Estradas - Aula 01 - INTRODUÇÃO PDFDocumento11 páginasProjeto de Estradas - Aula 01 - INTRODUÇÃO PDFBreno AugustoAinda não há avaliações
- T04-Traçado. Directriz PDFDocumento30 páginasT04-Traçado. Directriz PDFjose100% (1)
- Livro EsgotosDocumento272 páginasLivro EsgotosIsabela DiasAinda não há avaliações
- Aula 1 - Elementos Geométricos Das EstradasDocumento65 páginasAula 1 - Elementos Geométricos Das EstradasThays Nogueira Rodrigues100% (2)
- Unidade 2 EstradasDocumento20 páginasUnidade 2 EstradasLucas SouzaAinda não há avaliações
- Densidade Teorica CBUQDocumento1 páginaDensidade Teorica CBUQLucas SouzaAinda não há avaliações
- Unidade 4 EstradasDocumento19 páginasUnidade 4 EstradasLucas SouzaAinda não há avaliações
- Densidade Teorica CBUQDocumento4 páginasDensidade Teorica CBUQLucas SouzaAinda não há avaliações
- Unidade 8 EstradasDocumento32 páginasUnidade 8 EstradasLucas SouzaAinda não há avaliações
- Laudo de Rompimento de Concreto Da Ferrovia Mar KM-735Documento52 páginasLaudo de Rompimento de Concreto Da Ferrovia Mar KM-735Lucas SouzaAinda não há avaliações
- Matemática Anos IniciaisDocumento37 páginasMatemática Anos IniciaisMaria Helena Souza100% (1)
- Verificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxDocumento3 páginasVerificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxMarcos PaparaziAinda não há avaliações
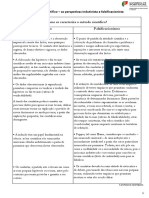
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocumento2 páginasO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraAinda não há avaliações
- Brousseau G. SlidesDocumento67 páginasBrousseau G. SlidesE_RCARVALHO100% (1)
- Atividade Prática - PPII - ELE - 1Documento4 páginasAtividade Prática - PPII - ELE - 1Henrique Marques100% (1)
- Exemplo3.TCC AgrupamentoDocumento26 páginasExemplo3.TCC AgrupamentotalesfdsAinda não há avaliações
- D2 Matemática SAEB - PENSE EXATODocumento43 páginasD2 Matemática SAEB - PENSE EXATOfbmendesAinda não há avaliações
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocumento69 páginasEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROAinda não há avaliações
- De Stijl ManifestoDocumento2 páginasDe Stijl ManifestoRogeri O LiveiraAinda não há avaliações
- Teste - MecânicaDocumento6 páginasTeste - MecânicaLuciana SilvaAinda não há avaliações
- DBF para SisvarDocumento3 páginasDBF para SisvarEdi Alves PurificaçãoAinda não há avaliações
- Termodinâmica - FÍSICA (PROF. HENRIQUE)Documento6 páginasTermodinâmica - FÍSICA (PROF. HENRIQUE)Henrique ToledoAinda não há avaliações
- Introdução À EnzimologiaDocumento23 páginasIntrodução À EnzimologiaFrancisco Oliveira100% (2)
- Ebook Scrum ArretadoDocumento76 páginasEbook Scrum ArretadoRaimundo MoreiraAinda não há avaliações
- FichasDocumento1 páginaFichasCatarina FernandesAinda não há avaliações
- Bioquímica EngAmb T2 Grupo 05 Prova 02Documento4 páginasBioquímica EngAmb T2 Grupo 05 Prova 02Lucas SantosAinda não há avaliações
- ABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesDocumento66 páginasABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesBárbara CastroAinda não há avaliações
- Optic ADocumento6 páginasOptic ApaulaorobertaoAinda não há avaliações
- Nivelamento - Eletricidade BásicaDocumento52 páginasNivelamento - Eletricidade BásicaNayara MercesAinda não há avaliações
- Prova PDFDocumento12 páginasProva PDFMaria MarizAinda não há avaliações
- Aula 11Documento63 páginasAula 11Gustavo DominicesAinda não há avaliações
- Aula 02 - MAD - Bacteriologia IDocumento51 páginasAula 02 - MAD - Bacteriologia IGabriely CristinaAinda não há avaliações
- UntitledDocumento37 páginasUntitledAnna Gabriele Marques de OliveiraAinda não há avaliações
- Eletrotécnica - P3-G1 - EMC - 2008-1Documento2 páginasEletrotécnica - P3-G1 - EMC - 2008-1AllanAinda não há avaliações
- Questões AL 1.1Documento2 páginasQuestões AL 1.1Diogo AlexandreAinda não há avaliações
- Aula 2 Eletroquímica (Modo de Compatibilidade)Documento43 páginasAula 2 Eletroquímica (Modo de Compatibilidade)Ronan MullerAinda não há avaliações