Você também pode gostar
- Exercicios Resistencia Dos Materias Online - UNIPDocumento92 páginasExercicios Resistencia Dos Materias Online - UNIPBruna Kono100% (1)
- Treinamento FMEADocumento64 páginasTreinamento FMEARafael Pádua Oliveira100% (1)
- E2E Coolers: DiagnósticoDocumento648 páginasE2E Coolers: DiagnósticoGestão em Equipamentos de Mercado GEMAinda não há avaliações
- Instrumentos TopográficosDocumento11 páginasInstrumentos TopográficosKięlsęPaulaAinda não há avaliações
- Mackenzie Sapatas Novo R1Documento26 páginasMackenzie Sapatas Novo R1Renan Chama MartinAinda não há avaliações
- Autorizacao VeiculoDocumento1 páginaAutorizacao Veiculofabriciomachado100% (1)
- MWM InjeçãoDocumento14 páginasMWM InjeçãoLuisCarlosKovalchuk100% (1)
- Cap6 - EfeitosRealimentacao-ErrosMEECDocumento32 páginasCap6 - EfeitosRealimentacao-ErrosMEECmaxwell fanboyAinda não há avaliações
- Técnicas de Resposta em Frequência - BodeDocumento42 páginasTécnicas de Resposta em Frequência - BodeJoão Pedro MoreiraAinda não há avaliações
- AULA 01 - Introdução A Redes IndustriaisDocumento33 páginasAULA 01 - Introdução A Redes IndustriaisDavidMendelsohnSaBarretoGomesAinda não há avaliações
- Relatorio de COntrole Automatico - COntroladores PD, PI e PIDDocumento19 páginasRelatorio de COntrole Automatico - COntroladores PD, PI e PIDDiego YanezAinda não há avaliações
- Ferramentas Da Qualidade - ApresentaçãoDocumento10 páginasFerramentas Da Qualidade - ApresentaçãoenglopesAinda não há avaliações
- Title SubtitleDocumento31 páginasTitle Subtitlepaulo limaAinda não há avaliações
- Manual Algoritmos e Estrut - DadosDocumento41 páginasManual Algoritmos e Estrut - DadosBergAinda não há avaliações
- Relatório Simulação Posição Motor CC FINAL3Documento16 páginasRelatório Simulação Posição Motor CC FINAL3Caio Caló AmaralAinda não há avaliações
- Treinamento FMEADocumento64 páginasTreinamento FMEAYuriAinda não há avaliações
- Aplicação de Técnicas de Inteligência ArtificialDocumento11 páginasAplicação de Técnicas de Inteligência ArtificialHugo Sérgio L. AraújoAinda não há avaliações
- Análise de Riscos HAZOP Nos Sistemas ElétricosDocumento2 páginasAnálise de Riscos HAZOP Nos Sistemas ElétricosClaudia MartinsAinda não há avaliações
- Modelo de Apr - FmeaDocumento5 páginasModelo de Apr - FmeaJeferson Lucas CândidoAinda não há avaliações
- Sistemas de Controle 1 - Material EaD - Capítulo 4Documento92 páginasSistemas de Controle 1 - Material EaD - Capítulo 4carlos arthurAinda não há avaliações
- Controle PI, PD e PIDDocumento50 páginasControle PI, PD e PIDRafael VieiraAinda não há avaliações
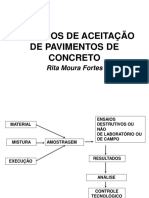
- Critérios de Aceitação de Pavimentos de ConcretoDocumento50 páginasCritérios de Aceitação de Pavimentos de ConcretoRita Moura FortesAinda não há avaliações
- Trab2 Capq2 SintoniaDocumento15 páginasTrab2 Capq2 SintoniaDiulie BornAinda não há avaliações
- Minitab - CEP e R&RDocumento79 páginasMinitab - CEP e R&RFellipe BarbozaAinda não há avaliações
- Aula 2Documento28 páginasAula 2Cícero Augusto de SouzaAinda não há avaliações
- 06 - Ações de ControleDocumento10 páginas06 - Ações de ControleFabio YamamotoAinda não há avaliações
- Resumo ControladoresDocumento3 páginasResumo ControladoresMarcela AlencarAinda não há avaliações
- Aula 03 - Blocos de FuncoesDocumento25 páginasAula 03 - Blocos de FuncoesSamuel SamuelAinda não há avaliações
- Inspeção de EntradasDocumento27 páginasInspeção de EntradasRenato CozzaAinda não há avaliações
- Trabalho de Função de Transferência1Documento9 páginasTrabalho de Função de Transferência1renatoAinda não há avaliações
- CQI-15 - Special Weld Audit PT-BRASILDocumento6 páginasCQI-15 - Special Weld Audit PT-BRASILRudiney TrombettaAinda não há avaliações
- ARPO - Apostila de TreinamentoDocumento20 páginasARPO - Apostila de TreinamentoIva_nessaAinda não há avaliações
- AULA 01 - Introdução A Redes IndustriaisDocumento32 páginasAULA 01 - Introdução A Redes IndustriaisPedro VieiraAinda não há avaliações
- 1 - 2 - Malha Aberta e FechadaDocumento20 páginas1 - 2 - Malha Aberta e FechadaWanderley Terci EstevesAinda não há avaliações
- 176 Avaliacao de Riscos MODELO1Documento52 páginas176 Avaliacao de Riscos MODELO1Luciano AraújoAinda não há avaliações
- Cap6 - EfeitosRealimentacao-ErrosDocumento32 páginasCap6 - EfeitosRealimentacao-Errosandr7figueir-143034Ainda não há avaliações
- 03-Manual de ExperimentosDocumento203 páginas03-Manual de ExperimentosAmaro Da Silva Lopes JúniorAinda não há avaliações
- Apostila 2Documento14 páginasApostila 2Laine de Melo LacerdaAinda não há avaliações
- AULA 05 - GrafcetDocumento31 páginasAULA 05 - GrafcetFabricio EvaAinda não há avaliações
- Warrior: Variador de AvançoDocumento2 páginasWarrior: Variador de AvançoRafael nunes pereira de sáAinda não há avaliações
- GMCDocumento14 páginasGMCGabriKarnaAinda não há avaliações
- Método Passo A Passo para CLPDocumento44 páginasMétodo Passo A Passo para CLPfernandoAinda não há avaliações
- PMI 3226 - Texto HAZOPDocumento10 páginasPMI 3226 - Texto HAZOPRicardo HideyoAinda não há avaliações
- PACCAR MX 13 EPA2013 Diagnostic Manual P0016 To P060C WK 11 2015 (071 140) .En - PTDocumento70 páginasPACCAR MX 13 EPA2013 Diagnostic Manual P0016 To P060C WK 11 2015 (071 140) .En - PTJuarez Geronimo Da SilvaAinda não há avaliações
- Algoritmo e Logica Guia de Estudos01Documento22 páginasAlgoritmo e Logica Guia de Estudos01Alexandre MartinsAinda não há avaliações
- Sistemas de ControleDocumento23 páginasSistemas de ControleJoão CarneiroAinda não há avaliações
- Controle de Processos - Aula 3 - Versão 3Documento53 páginasControle de Processos - Aula 3 - Versão 3Jean Sarmento FerrazAinda não há avaliações
- PACCAR MX 13 EPA2013 Diagnostic Manual P0016 To P060C WK 11 2015 (141 210) .En - PTDocumento70 páginasPACCAR MX 13 EPA2013 Diagnostic Manual P0016 To P060C WK 11 2015 (141 210) .En - PTJuarez Geronimo Da SilvaAinda não há avaliações
- Procad 40 Rev 03 Validação de SoftwareDocumento7 páginasProcad 40 Rev 03 Validação de SoftwaresegiogfAinda não há avaliações
- Pratica Circuitos 3Documento4 páginasPratica Circuitos 3Hudson GasparAinda não há avaliações
- Apostila Lab Micro 2019Documento127 páginasApostila Lab Micro 2019Oliver HeinrichAinda não há avaliações
- T01 - Introdução À AutomaçãoDocumento43 páginasT01 - Introdução À AutomaçãoPaolo GonçalvesAinda não há avaliações
- 05 PUP Projeto de Layout TecnicasDocumento73 páginas05 PUP Projeto de Layout TecnicasCYNTHIA DE FREITAS GONCALVES FERREIRAAinda não há avaliações
- 027 - S70 - IT - Realizar Teste Bateria E-IPMDocumento1 página027 - S70 - IT - Realizar Teste Bateria E-IPMSERGIO ARAUJOAinda não há avaliações
- Treinamento Programação Intermediário TP-03Documento89 páginasTreinamento Programação Intermediário TP-03jonnesAinda não há avaliações
- Automação Caldeira 01Documento15 páginasAutomação Caldeira 01IsaacAinda não há avaliações
- Apostila MSP430 CEFET-MGDocumento133 páginasApostila MSP430 CEFET-MGriquetretAinda não há avaliações
- Modelo de Comissionamento 1Documento3 páginasModelo de Comissionamento 1fbs1984100% (1)
- Ons DPL 0078 2018Documento61 páginasOns DPL 0078 2018Vinicius FigueiredoAinda não há avaliações
- S-PAA - Conceito e DefiniçãoDocumento8 páginasS-PAA - Conceito e Definiçãocmo.brunoAinda não há avaliações
- As 7 Novas Ferramentas Da QualidadeDocumento9 páginasAs 7 Novas Ferramentas Da QualidadePaulo Ferreira100% (1)
- MIT045 - R03PT - Roteiro de TestesDocumento68 páginasMIT045 - R03PT - Roteiro de TestesCamila MarcelinoAinda não há avaliações
- Sintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPNo EverandSintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPAinda não há avaliações
- Artigo Grupo 1Documento2 páginasArtigo Grupo 1Paulo CesarAinda não há avaliações
- 1.1 Tabela de Transformadas de Laplace2Documento3 páginas1.1 Tabela de Transformadas de Laplace2Paulo CesarAinda não há avaliações
- Tarefa de Derivadas de CompostasDocumento3 páginasTarefa de Derivadas de CompostasPaulo CesarAinda não há avaliações
- Aula 4-DerivadaS E AS CurvasDocumento12 páginasAula 4-DerivadaS E AS CurvasPaulo CesarAinda não há avaliações
- AULA 8 - 09.10.020 - Derivadas de Compostas.Documento23 páginasAULA 8 - 09.10.020 - Derivadas de Compostas.Paulo CesarAinda não há avaliações
- Atv1-Paulo Cesar Alves Da SilvaDocumento2 páginasAtv1-Paulo Cesar Alves Da SilvaPaulo CesarAinda não há avaliações
- Viscosidade de Soluções Poliméricas DiluidasDocumento50 páginasViscosidade de Soluções Poliméricas DiluidasGuilherme Henrique Dos SantosAinda não há avaliações
- RotaevaporadorDocumento10 páginasRotaevaporadorAlex OzzyAinda não há avaliações
- Lista de Exerccio 10Documento4 páginasLista de Exerccio 10Hellen Lunga0% (1)
- Aula08 Quimica4 ExercíciosDocumento3 páginasAula08 Quimica4 ExercíciosjugaspareAinda não há avaliações
- Resolução RDC ANVISA #189, de 18jul03Documento7 páginasResolução RDC ANVISA #189, de 18jul03Camila CalhauAinda não há avaliações
- Software de Análise e Monitoramento de HardwareDocumento72 páginasSoftware de Análise e Monitoramento de HardwareJanio FariasAinda não há avaliações
- RODAPAR - CatálogoDocumento20 páginasRODAPAR - CatálogoMagno AndradeAinda não há avaliações
- Datasheets + Registro INMETRO e Conformidade Modulos e Inversor - BENOLIELDocumento7 páginasDatasheets + Registro INMETRO e Conformidade Modulos e Inversor - BENOLIELMarcus BranchAinda não há avaliações
- Redes de Computadores - Capitulo 5 (Kurose)Documento5 páginasRedes de Computadores - Capitulo 5 (Kurose)Leila RodriguesAinda não há avaliações
- Manual Geral para DreamboxDocumento43 páginasManual Geral para DreamboxCristiane Cardoso100% (2)
- Chapa Expandida - GRADECOMDocumento5 páginasChapa Expandida - GRADECOMHumberto BermudezAinda não há avaliações
- 196397-Aula 3 - Escoamento UniformeDocumento29 páginas196397-Aula 3 - Escoamento UniformeLucas LaurianoAinda não há avaliações
- Laudo Mecânico Caminhão Munck Phi-9d43Documento10 páginasLaudo Mecânico Caminhão Munck Phi-9d43Suy Ane Soares MoraisAinda não há avaliações
- Rafael Prudencio Sacs A Diaz 2012Documento205 páginasRafael Prudencio Sacs A Diaz 2012Marcela MartinsAinda não há avaliações
- DS 451 SayerrazDocumento10 páginasDS 451 Sayerrazeduardo paivaAinda não há avaliações
- TCs de Proteção - MediçãoDocumento8 páginasTCs de Proteção - MediçãoClodoaldo RondaAinda não há avaliações
- gvSIG Mobile No Juno SB Com Windows Mobile 6Documento3 páginasgvSIG Mobile No Juno SB Com Windows Mobile 6Cesar João AndreazzaAinda não há avaliações
- Manual RECOPI Nacional - Web ServiceDocumento19 páginasManual RECOPI Nacional - Web ServiceAdib DiasAinda não há avaliações
- Desenho de Projetos PDFDocumento56 páginasDesenho de Projetos PDFPaulo Henrique PaivaAinda não há avaliações
- Procedimento para AquisicaoDocumento5 páginasProcedimento para AquisicaoPaulo Edson FernandesAinda não há avaliações
- Ciclo Da Ureia - TextoDocumento2 páginasCiclo Da Ureia - TextoAyrton Correa Fernandes de CarvalhoAinda não há avaliações
- Artigo - Gestão de ObrasDocumento10 páginasArtigo - Gestão de ObrasricardoluzAinda não há avaliações
- Fichamento de CitaçãoDocumento2 páginasFichamento de CitaçãoJoão Lucas PereiraAinda não há avaliações
- Introdução: Testando e AjustandoDocumento12 páginasIntrodução: Testando e AjustandoBrunoAinda não há avaliações
- Cinética Quimica GeralDocumento6 páginasCinética Quimica GeralJean QueirozAinda não há avaliações
- FICHA TÉCNICA - GL - Mit - DownloadDocumento1 páginaFICHA TÉCNICA - GL - Mit - DownloadDinslei FerreiraAinda não há avaliações