Você também pode gostar
- Analogia Geométrica E Produtos De Vetores Em N DimensõesNo EverandAnalogia Geométrica E Produtos De Vetores Em N DimensõesAinda não há avaliações
- Introdução à Álgebra Linear e Geometria AnalíticaDocumento41 páginasIntrodução à Álgebra Linear e Geometria AnalíticaHabeenkiiAinda não há avaliações
- Material de apoio para estudo de Geometria AnalíticaDocumento28 páginasMaterial de apoio para estudo de Geometria AnalíticaArtur SponchiadoAinda não há avaliações
- Geometria VetorialDocumento223 páginasGeometria VetorialWellington AntunesAinda não há avaliações
- Geometria analítica: notas de aula sobre vetoresDocumento56 páginasGeometria analítica: notas de aula sobre vetoresThalia Caroline MartinsAinda não há avaliações
- VetoresDocumento26 páginasVetoresJesué Lucas DiogoAinda não há avaliações
- Vetor - (Matemática - ) - Wikipédia, A Enciclopédia Livre PDFDocumento17 páginasVetor - (Matemática - ) - Wikipédia, A Enciclopédia Livre PDFJAIRAGNERAinda não há avaliações
- Vetores: Soma, Produto Escalar e Sistemas de CoordenadasDocumento40 páginasVetores: Soma, Produto Escalar e Sistemas de CoordenadasRyan KevenAinda não há avaliações
- Aula 2 2024Documento15 páginasAula 2 2024sara.alves9402Ainda não há avaliações
- Reforço de Engenharia: Abordagem Geométrica de Vetores emDocumento6 páginasReforço de Engenharia: Abordagem Geométrica de Vetores emAnderson Ricardo SantosAinda não há avaliações
- Ficha Sobre VetoresDocumento33 páginasFicha Sobre VetoresAfonso CuambaAinda não há avaliações
- AES U1Documento27 páginasAES U1jabora63Ainda não há avaliações
- Aula 01Documento16 páginasAula 01HeitorAinda não há avaliações
- Geometria Analítica - EmentaDocumento4 páginasGeometria Analítica - EmentaPaulo Santos SouzaAinda não há avaliações
- Unidade 1Documento26 páginasUnidade 1Calebe Augusto Ornellas BertoluciAinda não há avaliações
- Geometria Analítica e Vetorial: Introdução aos VetoresDocumento292 páginasGeometria Analítica e Vetorial: Introdução aos VetoresIgor Lopes da Silva100% (1)
- Revisao1 Cálculo VetorialDocumento16 páginasRevisao1 Cálculo VetorialLívia PinheiroAinda não há avaliações
- Geometria Analítica e Vetoriais - Estrutura Vetorial do Plano e do EspaçoDocumento50 páginasGeometria Analítica e Vetoriais - Estrutura Vetorial do Plano e do EspaçoHenriqueAinda não há avaliações
- Aula de VetoresDocumento11 páginasAula de VetoresHeloisa SoaresAinda não há avaliações
- Livro Ga 2 PDFDocumento294 páginasLivro Ga 2 PDFMirna Maria PortoAinda não há avaliações
- 005 AulaCalcVectDocumento25 páginas005 AulaCalcVectKayla FariaAinda não há avaliações
- Cálculo Vetorial: Grandezas, Operações e AplicaçõesDocumento20 páginasCálculo Vetorial: Grandezas, Operações e Aplicaçõesleandro1281Ainda não há avaliações
- Vetores - Tratamento GeométricoDocumento110 páginasVetores - Tratamento GeométricoleoleAinda não há avaliações
- Apêndice 2Documento39 páginasApêndice 2Matheus SportsAinda não há avaliações
- Vetores no Plano: Propriedades e OperaçõesDocumento51 páginasVetores no Plano: Propriedades e OperaçõesDyovana BeatrizAinda não há avaliações
- Biomecânica das Forças no Corpo HumanoDocumento75 páginasBiomecânica das Forças no Corpo HumanoFernanda ElisaAinda não há avaliações
- 00 - VetoresDocumento4 páginas00 - VetoresItalo DanielAinda não há avaliações
- Geometria AnaliticaDocumento41 páginasGeometria AnaliticaSpartans MorthovAinda não há avaliações
- Aula Extra - Teoria Geral Dos VetoresDocumento26 páginasAula Extra - Teoria Geral Dos VetoresAdriano SilvaAinda não há avaliações
- Geometria Analítica: Vetores, Retas e PlanosDocumento11 páginasGeometria Analítica: Vetores, Retas e PlanosHélio SantosAinda não há avaliações
- Transformações lineares no planoDocumento65 páginasTransformações lineares no planoPaulo CesarAinda não há avaliações
- Geometria Analitica NotasDocumento208 páginasGeometria Analitica NotasFelipe BitencourtAinda não há avaliações
- Física: Mecânica, Termodinâmica e ÓpticaDocumento28 páginasFísica: Mecânica, Termodinâmica e ÓpticasucasasAinda não há avaliações
- 0.MA - Elemento Textual - Geometria Analítica e Álgebra LinearDocumento66 páginas0.MA - Elemento Textual - Geometria Analítica e Álgebra LinearElielson LimaAinda não há avaliações
- Geometria Analitica NotasDocumento46 páginasGeometria Analitica NotasJosé XavierAinda não há avaliações
- GA Cap 01Documento10 páginasGA Cap 01Jéssica Tavares HeffernanAinda não há avaliações
- Álgebra Linear: Vetores, Operações Vetoriais e Espaços VetoriaisDocumento78 páginasÁlgebra Linear: Vetores, Operações Vetoriais e Espaços VetoriaisSabrina SilveiraAinda não há avaliações
- Operaes Com Vetores-30.08.2023Documento62 páginasOperaes Com Vetores-30.08.2023Ferjaz 2.0Ainda não há avaliações
- Vectores PlanoDocumento17 páginasVectores PlanoMaria ApóstoloAinda não há avaliações
- VETORESDocumento11 páginasVETORESLily AtreidesAinda não há avaliações
- Tudo Sobre Vetores PDFDocumento17 páginasTudo Sobre Vetores PDFeriksongbi0% (1)
- Geometria DescritivaDocumento73 páginasGeometria DescritivaDoc Willys100% (1)
- Vetores Na EngenhariaDocumento28 páginasVetores Na EngenhariaLarissaPalmeiraAinda não há avaliações
- Álgebra Linear - Capítulo 1 PDFDocumento36 páginasÁlgebra Linear - Capítulo 1 PDFAllisonAinda não há avaliações
- Produto escalar matemáticaDocumento3 páginasProduto escalar matemáticajuan.diego.br3367Ainda não há avaliações
- Parte 2 - Vetores e Produto - FISENGDocumento49 páginasParte 2 - Vetores e Produto - FISENGMarcelo CilimAinda não há avaliações
- Os Vetores e Suas BasesDocumento18 páginasOs Vetores e Suas BasesbenicioAinda não há avaliações
- Aulas de Geometria Analítica 2014-1Documento76 páginasAulas de Geometria Analítica 2014-1Walter NomboraAinda não há avaliações
- Resumo Vetores, Sistema 3dequilibrio e Corpo RigidoDocumento24 páginasResumo Vetores, Sistema 3dequilibrio e Corpo RigidoCAMILA RODRIGUESAinda não há avaliações
- Vetores: Adição, Subtração e Multiplicação por EscalarDocumento57 páginasVetores: Adição, Subtração e Multiplicação por EscalarGuilherme Heiden100% (1)
- Material Sobre VetoresDocumento7 páginasMaterial Sobre VetoresJoyce Helena da SilveiraAinda não há avaliações
- Vetores - Aplicação Na EngenhariaDocumento28 páginasVetores - Aplicação Na EngenhariaLarissaPalmeira83% (6)
- Conf. 1. Vetores. Retas. Planos. Quádricas_094649Documento57 páginasConf. 1. Vetores. Retas. Planos. Quádricas_094649Osvaldo EmanuelAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
- Curvas de Largura Constante, Lugares Geométricos e Envolventes: Uma Abordagem com Animações e FigurasNo EverandCurvas de Largura Constante, Lugares Geométricos e Envolventes: Uma Abordagem com Animações e FigurasAinda não há avaliações
- Aula 1 - Introduo Linguagem CDocumento52 páginasAula 1 - Introduo Linguagem CHabeenkiiAinda não há avaliações
- Alta Do Dólar e Os Reflexos Econômicos.Documento3 páginasAlta Do Dólar e Os Reflexos Econômicos.HabeenkiiAinda não há avaliações
- O Espírito Absoluto e a concepção hegeliana do EstadoDocumento3 páginasO Espírito Absoluto e a concepção hegeliana do EstadoHabeenkiiAinda não há avaliações
- O Impacto Do Câmbio Do Turismo À IndústriaDocumento3 páginasO Impacto Do Câmbio Do Turismo À IndústriaHabeenkiiAinda não há avaliações
- Infraestrutura e superestrutura segundo MarxDocumento3 páginasInfraestrutura e superestrutura segundo MarxHabeenkiiAinda não há avaliações
- Hegel: Vida, obra e idealismo dialéticoDocumento3 páginasHegel: Vida, obra e idealismo dialéticoHabeenkiiAinda não há avaliações
- A dialética hegelianaDocumento5 páginasA dialética hegelianaHabeenkiiAinda não há avaliações
- Aula 18 - As Bases Do Trabalho Na Sociedade ModernaDocumento28 páginasAula 18 - As Bases Do Trabalho Na Sociedade ModernaHabeenkiiAinda não há avaliações
- Materialismo Histórico DialéticoDocumento23 páginasMaterialismo Histórico DialéticoHabeenkiiAinda não há avaliações
- 1 Lei de MendelDocumento15 páginas1 Lei de MendelHabeenkiiAinda não há avaliações
- Limites de FunçõesDocumento44 páginasLimites de FunçõesHabeenkiiAinda não há avaliações
- Taxas de Variação, Derivadas e Funções PosiçãoDocumento25 páginasTaxas de Variação, Derivadas e Funções PosiçãoHabeenkiiAinda não há avaliações
- Yoga para Crianças Especiais 2Documento21 páginasYoga para Crianças Especiais 2KlausFaryjAinda não há avaliações
- Os valores humanos fundamentaisDocumento3 páginasOs valores humanos fundamentaisRoney Soares100% (1)
- Captura de Tela 2023-05-03 À(s) 16.27.46Documento14 páginasCaptura de Tela 2023-05-03 À(s) 16.27.46Kássia DayanaAinda não há avaliações
- Cronograma Semanal 61,62,63 03-05...Documento2 páginasCronograma Semanal 61,62,63 03-05...Leonardo RosaAinda não há avaliações
- AULA 06 - A Descoberta Da Primeira Certeza, Aprendendo A Filosofar e Proposta FinalDocumento4 páginasAULA 06 - A Descoberta Da Primeira Certeza, Aprendendo A Filosofar e Proposta FinalCristina MarquesAinda não há avaliações
- Valor Anafórico, Catafórico e EndofóricoDocumento5 páginasValor Anafórico, Catafórico e EndofóricoZilda Cibele CostaAinda não há avaliações
- Avaetê ArtigoDocumento11 páginasAvaetê ArtigoMarcos GMAinda não há avaliações
- Competencias SocioemocionaisDocumento2 páginasCompetencias SocioemocionaisLuciano do N. LeiteAinda não há avaliações
- Apostila Arte 9 Ano BNCC 1 BimestreDocumento60 páginasApostila Arte 9 Ano BNCC 1 BimestreProfessora Juliana RodriguesAinda não há avaliações
- A Educação Geográfica em ConstruçãoDocumento35 páginasA Educação Geográfica em ConstruçãoVinícius AlmeidaAinda não há avaliações
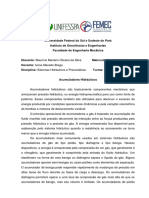
- Acumuladores hidráulicosDocumento2 páginasAcumuladores hidráulicosMaurício MarianoAinda não há avaliações
- BJJ mente corpo almaDocumento6 páginasBJJ mente corpo almaDjalma HenaresAinda não há avaliações
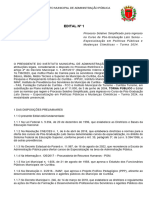
- EDITAL 1_2024 publicado no DOMDocumento18 páginasEDITAL 1_2024 publicado no DOMrogonsalvesAinda não há avaliações
- Velocidades em questões de física e matemáticaDocumento4 páginasVelocidades em questões de física e matemáticaIsabela Coimbra Ladeira MoraisAinda não há avaliações
- Erik Erikson e A Teoria ContemporâneaDocumento22 páginasErik Erikson e A Teoria ContemporâneaEdson Jorge In�cioAinda não há avaliações
- Conteúdo Das Aulas 1 A 10 para Imprimir - História e Fundamentos Da FisioterapiaDocumento34 páginasConteúdo Das Aulas 1 A 10 para Imprimir - História e Fundamentos Da FisioterapiaCamila Rosa100% (2)
- Circular CGJ N. 300-2022Documento7 páginasCircular CGJ N. 300-2022J. A. RechAinda não há avaliações
- História da FotografiaDocumento34 páginasHistória da FotografiaJoyce GuadagnuciAinda não há avaliações
- Análise de ácido úrico e albumina no LABMAX 2Documento58 páginasAnálise de ácido úrico e albumina no LABMAX 2Paulo VictorAinda não há avaliações
- Sobrepressão para Dimensionamento de Válvula de Alívio PDFDocumento4 páginasSobrepressão para Dimensionamento de Válvula de Alívio PDFClerder CardosoAinda não há avaliações
- Alterações em editais de cursos de pós-graduação na ESP/CEDocumento44 páginasAlterações em editais de cursos de pós-graduação na ESP/CEGlauco BanhosAinda não há avaliações
- Adjetivo e SubstantivoDocumento5 páginasAdjetivo e SubstantivoGuilherme SantanaAinda não há avaliações
- Ficha de Avaliação - 3º Período - 3º Ano EM - IIDocumento8 páginasFicha de Avaliação - 3º Período - 3º Ano EM - IItulipa1977Ainda não há avaliações
- Introdução à construção de dashboards com ExcelDocumento30 páginasIntrodução à construção de dashboards com ExcelLivis The RabbitAinda não há avaliações
- Ensaio Filosófico Exemplo (Margarida S.)Documento4 páginasEnsaio Filosófico Exemplo (Margarida S.)Margarida SequeiraAinda não há avaliações
- Meio AmbienteDocumento4 páginasMeio AmbienteSonaly SilveiraAinda não há avaliações
- Fis 98Documento6 páginasFis 98Ten AndradeAinda não há avaliações
- Gabarito Do Estagio F de Matematica Do KumongolkesDocumento2 páginasGabarito Do Estagio F de Matematica Do Kumongolkestahtainara308Ainda não há avaliações
- Importancia Do Planeamento Estrategico Dos Recursos HumanosDocumento14 páginasImportancia Do Planeamento Estrategico Dos Recursos HumanosCardoso MagaiaAinda não há avaliações
- Runas Teoria e PraticaDocumento37 páginasRunas Teoria e PraticaFabio NascimentoAinda não há avaliações