Você também pode gostar
- Fundamentos Da Física Para A Ciência E Engenharia Dos MateriaisNo EverandFundamentos Da Física Para A Ciência E Engenharia Dos MateriaisAinda não há avaliações
- Movimento Retilíneo Uniformemente Variado (MRUVDocumento7 páginasMovimento Retilíneo Uniformemente Variado (MRUVCarlos Kauan Moreira de SousaAinda não há avaliações
- Aula 2 - Resistencia Dos MateriaisDocumento17 páginasAula 2 - Resistencia Dos MateriaisengeproduezoAinda não há avaliações
- Edocap 3Documento17 páginasEdocap 3Roberto NascimentoAinda não há avaliações
- 4-Transformaçoes Lineares - Livro de Algebra Linear IDocumento20 páginas4-Transformaçoes Lineares - Livro de Algebra Linear IFábio ArcanjoAinda não há avaliações
- Física II - Desafio 5Documento6 páginasFísica II - Desafio 5Daniel BetoretAinda não há avaliações
- Provas Cdi3Documento21 páginasProvas Cdi3Maria SebastiãoAinda não há avaliações
- Transformações de Galileu e Mecânica NewtonianaDocumento6 páginasTransformações de Galileu e Mecânica Newtonianamarcos henriqueAinda não há avaliações
- Resolucao Lista3 FGM TCLDocumento3 páginasResolucao Lista3 FGM TCLTainá CabalheiroAinda não há avaliações
- UtfprtensoesmodiiDocumento24 páginasUtfprtensoesmodiiremf21Ainda não há avaliações
- Resumos Mágico Mat IDocumento49 páginasResumos Mágico Mat Icila.santosousaAinda não há avaliações
- Lista 2 DonatoDocumento29 páginasLista 2 DonatoLeandro Lima RamaldesAinda não há avaliações
- EDL ExistenciaDocumento20 páginasEDL ExistenciaJoão Luiz CarvalhoAinda não há avaliações
- PME2300 Lista3Documento4 páginasPME2300 Lista3miric69924Ainda não há avaliações
- Dinâmica de Um Sistema de PartículasDocumento2 páginasDinâmica de Um Sistema de PartículasLucasAinda não há avaliações
- Prova Final de Cálculo IDocumento4 páginasProva Final de Cálculo IAna FigueiredoAinda não há avaliações
- Slides ST468Documento19 páginasSlides ST468Gilson Tavares da SilvaAinda não há avaliações
- L4.LinVIII 21 2Documento9 páginasL4.LinVIII 21 2Gustavo PimentelAinda não há avaliações
- PR 2Documento1 páginaPR 2Julio Alejo RuizAinda não há avaliações
- Isomorfismos e automorfismos de espaços vetoriaisDocumento4 páginasIsomorfismos e automorfismos de espaços vetoriaishugonunes89Ainda não há avaliações
- Lista de Exercicios em RDocumento2 páginasLista de Exercicios em RAlexandreSouzaAinda não há avaliações
- Lista de Exercicios Aplicações de DerivadasDocumento4 páginasLista de Exercicios Aplicações de DerivadasMarcos Silva MonteloAinda não há avaliações
- UEFC Análise de Vibrações Máquinas DinâmicaDocumento3 páginasUEFC Análise de Vibrações Máquinas DinâmicaLetty VianaAinda não há avaliações
- Lista 8 - Alguns Problemas ResolvidosDocumento6 páginasLista 8 - Alguns Problemas ResolvidosBruno dos SantosAinda não há avaliações
- Formulario 1testeDocumento3 páginasFormulario 1testeraramiroAinda não há avaliações
- Identidades HiperbólicasDocumento3 páginasIdentidades Hiperbólicasarmarq53Ainda não há avaliações
- 2 TensesDocumento23 páginas2 TensesMatheus Souza Martins (Kamattz)Ainda não há avaliações
- 2018Fev20-Econ-Gest (1) Matematica IDocumento2 páginas2018Fev20-Econ-Gest (1) Matematica Itfarodrigues98Ainda não há avaliações
- Força de Lorentz e lei de Biot-Savart: aula sobre eletromagnetismo clássicoDocumento8 páginasForça de Lorentz e lei de Biot-Savart: aula sobre eletromagnetismo clássicoTatiane NascimentoAinda não há avaliações
- Função não diferenciável em ponto apesar de derivadas parciais existiremDocumento4 páginasFunção não diferenciável em ponto apesar de derivadas parciais existiremGlaucia PiresAinda não há avaliações
- Transformação de LorentzDocumento4 páginasTransformação de LorentzJeniffer BubniakAinda não há avaliações
- Aula 4Documento36 páginasAula 4Fernanda MedeirosAinda não há avaliações
- Exemplos Nucleo Imagem TLDocumento3 páginasExemplos Nucleo Imagem TLOIBAinda não há avaliações
- Formulario Identidades TrigonometricasDocumento2 páginasFormulario Identidades TrigonometricasDanilo CuichanAinda não há avaliações
- Lista de equações diferenciais ordináriasDocumento4 páginasLista de equações diferenciais ordinárias糞 Viny FerrazAinda não há avaliações
- Autovalores e autovetores de operadores linearesDocumento25 páginasAutovalores e autovetores de operadores linearesIdney CharlisAinda não há avaliações
- P2 Gabarito 2019 1.Documento5 páginasP2 Gabarito 2019 1.Ana FigueiredoAinda não há avaliações
- Lista 4Documento3 páginasLista 4luis volpeAinda não há avaliações
- Aula 11 Matriz de Uma TransformaçãoDocumento6 páginasAula 11 Matriz de Uma TransformaçãotiagozaoAinda não há avaliações
- ms1 20112 Mod3Documento7 páginasms1 20112 Mod3Wesley FroxenAinda não há avaliações
- Aula4 e 5Documento6 páginasAula4 e 5Ricardo RibeiroAinda não há avaliações
- Formulários de Consulta - Série de Fourier - Ckt6-TabDocumento2 páginasFormulários de Consulta - Série de Fourier - Ckt6-TabAntonioAinda não há avaliações
- Exercicios Derivadas0 1Documento7 páginasExercicios Derivadas0 1Filipe FerreiraAinda não há avaliações
- FVV Lista3Documento3 páginasFVV Lista3Eduardo Dias GutterresAinda não há avaliações
- Resumo 2Documento11 páginasResumo 2Gustavo OliveiraAinda não há avaliações
- Relatividade GeralDocumento35 páginasRelatividade GeralAle do nomeAinda não há avaliações
- Sol Prova 01 26.06.2022Documento12 páginasSol Prova 01 26.06.2022vitor gAinda não há avaliações
- Aula 6Documento7 páginasAula 6Ricardo RibeiroAinda não há avaliações
- Exercício: Transformações Lineares, Subespaços e Conjunto Imagem.Documento9 páginasExercício: Transformações Lineares, Subespaços e Conjunto Imagem.felipe31415Ainda não há avaliações
- Análise Funcional Série FourierDocumento6 páginasAnálise Funcional Série FourierLeonardo TeramatsuAinda não há avaliações
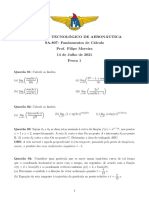
- Questões de Limites e DerivadasDocumento3 páginasQuestões de Limites e DerivadasFilipe MoreiraAinda não há avaliações
- Seminario 1 de Ah 2023.Documento2 páginasSeminario 1 de Ah 2023.Bleck KhalifaAinda não há avaliações
- As Equações Mais Utilizadas em Mecânica Dos FluidosDocumento13 páginasAs Equações Mais Utilizadas em Mecânica Dos FluidosGabriel MAinda não há avaliações
- Gabarito P3 Lista5Documento16 páginasGabarito P3 Lista5Leonardo FarinaAinda não há avaliações
- Relatório Projeto ComputacionalDocumento15 páginasRelatório Projeto ComputacionalGustavo DavidAinda não há avaliações
- Funções infinitesimais e comparação de ordemDocumento32 páginasFunções infinitesimais e comparação de ordemMario Ossufo SelimaneAinda não há avaliações
- Mecânica Da Partícula-Aula 7Documento26 páginasMecânica Da Partícula-Aula 7NicolasAinda não há avaliações
- Como Aprender EdoDocumento2 páginasComo Aprender EdoDamdara FerreiraAinda não há avaliações
- M04 - Notas de Aula PDFDocumento12 páginasM04 - Notas de Aula PDFKayro CesarAinda não há avaliações
- Condicionamento de ar: origem e evolução da tecnologiaDocumento15 páginasCondicionamento de ar: origem e evolução da tecnologiaSergio Daúde PortucalenseAinda não há avaliações
- RelatorioDocumento8 páginasRelatorioAmanda Barbosa CastroAinda não há avaliações
- Determinação experimental do coeficiente de dilatação linearDocumento10 páginasDeterminação experimental do coeficiente de dilatação linearRobson SantosAinda não há avaliações
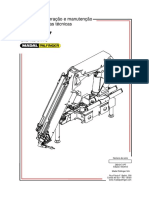
- Manual de Operação e Manutenção - Palfinger MD 45007 PTDocumento38 páginasManual de Operação e Manutenção - Palfinger MD 45007 PTPatrick Brilhante100% (6)
- 2018 2b 2 - EstruturasDocumento5 páginas2018 2b 2 - EstruturasEduardo AquinoAinda não há avaliações
- 2 - Atividade de H+ em Soluções ÁcidasDocumento4 páginas2 - Atividade de H+ em Soluções ÁcidasIzaias Campos da Paixão0% (1)
- Capitulo3 InstPropTurbinasDocumento48 páginasCapitulo3 InstPropTurbinasmacs73100% (1)
- Saeed Farokhi Problem Answers PDFDocumento62 páginasSaeed Farokhi Problem Answers PDFScribdTranslationsAinda não há avaliações
- Aula 6 - Mec Solidos 1 - Equilíbrio de Um Corpo Rígido - ExercíciosDocumento8 páginasAula 6 - Mec Solidos 1 - Equilíbrio de Um Corpo Rígido - Exercíciosyayamuhohjomail.comAinda não há avaliações
- Problemas BiofísicaDocumento2 páginasProblemas BiofísicaMax FilmesAinda não há avaliações
- Relatório de Conformidade - Pau de CargaDocumento10 páginasRelatório de Conformidade - Pau de CargaSergio Rodrigues100% (1)
- Engenharia experimentalDocumento26 páginasEngenharia experimentalVictor NeresAinda não há avaliações
- Prova Química Mestrado UFPIDocumento5 páginasProva Química Mestrado UFPIromezioh77160% (1)
- Calorimetria - 1 Lei e 2 Lei Da TermodinâmicaDocumento2 páginasCalorimetria - 1 Lei e 2 Lei Da TermodinâmicaLucasAinda não há avaliações
- Manual Técnico 30 GXBDocumento48 páginasManual Técnico 30 GXBDenise Hernandez100% (3)
- Métodos Geofísicos Aplicados À Engenharia e Geotecnia: Comunicação TécnicaDocumento243 páginasMétodos Geofísicos Aplicados À Engenharia e Geotecnia: Comunicação TécnicaJoão GoveAinda não há avaliações
- Armadura de suspensão para cruzamento de vigasDocumento30 páginasArmadura de suspensão para cruzamento de vigasPaulinho GalvãoAinda não há avaliações
- Cálculo de forças e momentos emDocumento16 páginasCálculo de forças e momentos emGleydson SantosAinda não há avaliações
- Apostila Automação Pneumática Parte 1 (Anderson Justus)Documento68 páginasApostila Automação Pneumática Parte 1 (Anderson Justus)cleversonperachiAinda não há avaliações
- Instalação e manutenção de motores CCDocumento33 páginasInstalação e manutenção de motores CCAndre LamotaAinda não há avaliações
- Estudo Dirigido Geologia - 2023Documento6 páginasEstudo Dirigido Geologia - 2023Glauco PrezotoAinda não há avaliações
- Dimensionamento e Segurança - IntroduçãoDocumento101 páginasDimensionamento e Segurança - IntroduçãoMarcelo Issler Ferreira SousaAinda não há avaliações
- Operação da UTE-BF em ciclo simplesDocumento98 páginasOperação da UTE-BF em ciclo simplesFlavia ZanetteAinda não há avaliações
- NBR 7190Documento107 páginasNBR 7190Douglas Fernandes Dos Santos100% (1)
- Transformações gasosas e cálculos químicosDocumento3 páginasTransformações gasosas e cálculos químicosIannis HerbertAinda não há avaliações
- (Refração Molar) Determinação Da RefratividadeDocumento15 páginas(Refração Molar) Determinação Da RefratividadeLeonardo Andrade89% (9)
- Noções Gerais de AnodizaçãoDocumento55 páginasNoções Gerais de AnodizaçãoReginaldo Alves100% (1)
- 10 CV5 Equipamento de FracionamentoDocumento16 páginas10 CV5 Equipamento de FracionamentoJorge AlbertoAinda não há avaliações
- TermoquímicaDocumento6 páginasTermoquímicaANA PAULA SILVA DOS ANJOSAinda não há avaliações