Você também pode gostar
- R P1 CDin 218Documento7 páginasR P1 CDin 21805606908190Ainda não há avaliações
- State Space ReductionDocumento14 páginasState Space ReductionAtaias Pereira ReisAinda não há avaliações
- Ação do vento em telhadosDocumento24 páginasAção do vento em telhadosRafael de OliveiraAinda não há avaliações
- MecB EMSC2 2011 CPP FCT1Documento5 páginasMecB EMSC2 2011 CPP FCT1nibetiv895Ainda não há avaliações
- Exame 2021 2Documento5 páginasExame 2021 2João CelestinoAinda não há avaliações
- LCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCDocumento11 páginasLCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCCesar Augusto Mendes Cordeiro da SilvaAinda não há avaliações
- EM707 Lista 09 1s 2017Documento2 páginasEM707 Lista 09 1s 2017SCScottAinda não há avaliações
- Aceleração e desaceleração de veículosDocumento24 páginasAceleração e desaceleração de veículosPeboAinda não há avaliações
- Lista 1Documento22 páginasLista 1Ricardo TeixeiraAinda não há avaliações
- Portfólio Cálculo Equações DiferenciaisDocumento8 páginasPortfólio Cálculo Equações DiferenciaisSergio Fernandes100% (1)
- PP02 - Mecânica Dos Solos - 2020-01Documento5 páginasPP02 - Mecânica Dos Solos - 2020-01MATHEUS KLABUNDEAinda não há avaliações
- Lista de Exercicios de ControleDocumento15 páginasLista de Exercicios de ControleJoao PedroAinda não há avaliações
- 1o Relatório - Estudo Do Motor de Corrente ContínuaDocumento6 páginas1o Relatório - Estudo Do Motor de Corrente ContínuaMilene OliveiraAinda não há avaliações
- Sistemas de primeira ordemDocumento10 páginasSistemas de primeira ordemSalatyel FellipeAinda não há avaliações
- Provao 99Documento39 páginasProvao 99Leonardo H. MacedoAinda não há avaliações
- P2 - Analises Com Met. KaneDocumento49 páginasP2 - Analises Com Met. KaneJúlia NogueiraAinda não há avaliações
- Funções de Transferência em Sistemas de ControleDocumento38 páginasFunções de Transferência em Sistemas de ControleLuis AraujoAinda não há avaliações
- ESTA020-17 – Modelagem e Controle - Segunda AvaliaçãoDocumento3 páginasESTA020-17 – Modelagem e Controle - Segunda AvaliaçãoAgatha MarquesAinda não há avaliações
- Aula01Documento14 páginasAula01Kuka Da Cesa JoaquimAinda não há avaliações
- Calculo de fatores de potência e impedâncias em sistemas elétricos trifásicosDocumento3 páginasCalculo de fatores de potência e impedâncias em sistemas elétricos trifásicosPatrick AugustoAinda não há avaliações
- Capitulo 2Documento17 páginasCapitulo 2Ney JuniorAinda não há avaliações
- 2024 - 04 - Transformada de Laplace - Função de TransferênciaDocumento49 páginas2024 - 04 - Transformada de Laplace - Função de TransferênciahinnaAinda não há avaliações
- Medição da viscosidade de um fluido através da velocidade limite de uma esferaDocumento3 páginasMedição da viscosidade de um fluido através da velocidade limite de uma esferaKauan Mitsu TakedaAinda não há avaliações
- Análise da resposta ao degrau de um circuito RLC série (atéDocumento13 páginasAnálise da resposta ao degrau de um circuito RLC série (atéPedro Henrique Piccoli RichettiAinda não há avaliações
- Exemplo de Um Exame de Escolha MultiplaDocumento6 páginasExemplo de Um Exame de Escolha MultiplaMarta FernandesAinda não há avaliações
- Lista 01Documento12 páginasLista 01SeverinoSalesAinda não há avaliações
- Resolução de EDOs com MapleDocumento2 páginasResolução de EDOs com MapleBruna SelauAinda não há avaliações
- Lista2 ElepotDocumento12 páginasLista2 Elepotmarlondiaspacheco98Ainda não há avaliações
- Olimpíada Brasileira de Física 2006 - 3a faseDocumento6 páginasOlimpíada Brasileira de Física 2006 - 3a faseLuisAinda não há avaliações
- Lista 1 Controle Analogico PDFDocumento122 páginasLista 1 Controle Analogico PDFMarcos AlvesAinda não há avaliações
- Relatório de Física - Experiencia Rotação e Momento de InérciaDocumento7 páginasRelatório de Física - Experiencia Rotação e Momento de InérciaJaquelyni GonçalvesAinda não há avaliações
- Cálculo de armaduras de vigas de betão armado segundo Eurocódigo 2Documento10 páginasCálculo de armaduras de vigas de betão armado segundo Eurocódigo 2Mauro XavierAinda não há avaliações
- FPE - Ficha de Trabalho de Física e QuímicaDocumento21 páginasFPE - Ficha de Trabalho de Física e Químicarita100% (1)
- Trabalho 9Documento13 páginasTrabalho 9GustavoTrentiniHamesterAinda não há avaliações
- Projeto 5: Limaçons: Estudar Limaçons Que São Equações Que São Da FormaDocumento2 páginasProjeto 5: Limaçons: Estudar Limaçons Que São Equações Que São Da FormaSebastião SimãoAinda não há avaliações
- Circuito RC com capacitores em série e paraleloDocumento11 páginasCircuito RC com capacitores em série e paraleloFernando MartinsAinda não há avaliações
- Apostila MCAEDocumento78 páginasApostila MCAEDébora VitóriaAinda não há avaliações
- Regulação de tensão com controlador digital e analógicoDocumento8 páginasRegulação de tensão com controlador digital e analógicoHaydan MirandaAinda não há avaliações
- Curvas de transição simétricasDocumento11 páginasCurvas de transição simétricasEdson Da GracaAinda não há avaliações
- Método das Bandas em Lajes VigadasDocumento15 páginasMétodo das Bandas em Lajes VigadasAFrancisco198100% (1)
- Capítulo 4 - Comportamento Dinâmico de SistemasDocumento40 páginasCapítulo 4 - Comportamento Dinâmico de Sistemasvinicius rochaAinda não há avaliações
- Curva VerticalDocumento7 páginasCurva VerticalBernardo TirreAinda não há avaliações
- Parte2 RespostaFrequencia ExerciciosDocumento2 páginasParte2 RespostaFrequencia ExerciciosFrancisco RodriguesAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Testes e Exams de Controlo AutomáticoDocumento31 páginasTestes e Exams de Controlo AutomáticoJoão SilvaAinda não há avaliações
- Lista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFDocumento3 páginasLista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFNatercia Miranda100% (1)
- Projeto e análise de controlador RTS para processo de segunda ordemDocumento18 páginasProjeto e análise de controlador RTS para processo de segunda ordemgabi freitasAinda não há avaliações
- Lista 3 - Aulas 5 e 6Documento17 páginasLista 3 - Aulas 5 e 6Luan AguiarAinda não há avaliações
- 02 - EXERCICIOS - Densidade de Fluxo Eletrico, Lei de Gauss e DivergenciaDocumento16 páginas02 - EXERCICIOS - Densidade de Fluxo Eletrico, Lei de Gauss e DivergenciaJosilda Dias PalmeiraAinda não há avaliações
- Concurso público para docentes do IF Sul de Minas - Prova escritaDocumento9 páginasConcurso público para docentes do IF Sul de Minas - Prova escritaEduarda Napoleão AlmeidaAinda não há avaliações
- Física básica paraDocumento42 páginasFísica básica paraJASP cienciasAinda não há avaliações
- Dinâmica de Sistemas Flutuantes OceânicosDocumento12 páginasDinâmica de Sistemas Flutuantes OceânicosGabriel BaroniAinda não há avaliações
- Resistividade de fio NiCr e medição com ponte WheatstoneDocumento4 páginasResistividade de fio NiCr e medição com ponte WheatstoneJose luiz coelho100% (1)
- Exercícios - Transformações Lineares, Operadores, Produto Interno e NormaDocumento4 páginasExercícios - Transformações Lineares, Operadores, Produto Interno e NormafelipeAinda não há avaliações
- Lista de Sistemas de Controle IIDocumento9 páginasLista de Sistemas de Controle IIfelipesineiderAinda não há avaliações
- Aula Teo12-Exemplos v2Documento28 páginasAula Teo12-Exemplos v2G0tBlackOpsAinda não há avaliações
- Exercícios Antes P1 - Sistemas de ControleDocumento2 páginasExercícios Antes P1 - Sistemas de ControlechikincvoAinda não há avaliações
- Gabarito AP1 Fisica 1a 2012 - 2Documento4 páginasGabarito AP1 Fisica 1a 2012 - 2Fábio MonsoresAinda não há avaliações
- #único - Swallow Me Whole by Gemma JamesDocumento372 páginas#único - Swallow Me Whole by Gemma Jameslusinda 900Ainda não há avaliações
- Limite de velocidade à noite com base no alcance dos faróisDocumento6 páginasLimite de velocidade à noite com base no alcance dos faróisRaphael MartelloAinda não há avaliações
- Nossa Fé - Liderança Bíblica - Currículo Cultura CristãDocumento50 páginasNossa Fé - Liderança Bíblica - Currículo Cultura CristãRafael Zanoto BoeiraAinda não há avaliações
- Instrumentação Virtual e AnalíticaDocumento4 páginasInstrumentação Virtual e AnalíticaDalton InacioAinda não há avaliações
- Concentração de EmpresasDocumento7 páginasConcentração de EmpresasNono LivrosAinda não há avaliações
- Estrutura e organelas da célula vegetalDocumento9 páginasEstrutura e organelas da célula vegetalCrisSumaqueiroAinda não há avaliações
- Treinamento e DesenvolvimentoDocumento18 páginasTreinamento e DesenvolvimentoAna Maria KasparAinda não há avaliações
- CONTRATOSUITSBLAZEDocumento5 páginasCONTRATOSUITSBLAZECésar SilvaAinda não há avaliações
- O que é o Ministério PúblicoDocumento5 páginasO que é o Ministério PúblicoG.H.Ainda não há avaliações
- D2 (9º ANO - Mat.) - Blog Do Prof. WarlesDocumento6 páginasD2 (9º ANO - Mat.) - Blog Do Prof. WarlesANA PAULA DA SILVA FERREIRAAinda não há avaliações
- CasaMaringá - Lista Eletronica e PerfumariaDocumento41 páginasCasaMaringá - Lista Eletronica e Perfumaria-Foemalord-Ainda não há avaliações
- Dicionário Etimológico da Mitologia Grega OnlineDocumento321 páginasDicionário Etimológico da Mitologia Grega OnlinevictorAinda não há avaliações
- Marketing Google século 21Documento4 páginasMarketing Google século 21Alice MAViMAinda não há avaliações
- Frases H/P sobre riscos à saúde e segurançaDocumento8 páginasFrases H/P sobre riscos à saúde e segurançaCátiaCardosoAinda não há avaliações
- Semana Da Arte Moderna- TropicalismoDocumento44 páginasSemana Da Arte Moderna- TropicalismospetanierisAinda não há avaliações
- Clio 1292 3 - PTG PDFDocumento388 páginasClio 1292 3 - PTG PDFMiguel MachadoAinda não há avaliações
- TCC - Concluido - Amanda Lucia KollettDocumento18 páginasTCC - Concluido - Amanda Lucia KollettLivia MedradoAinda não há avaliações
- Gabarito preliminar concurso público Rio Novo MGDocumento5 páginasGabarito preliminar concurso público Rio Novo MGLuiz Philip SimãoAinda não há avaliações
- Ficha 1Documento2 páginasFicha 1gonçaloAinda não há avaliações
- Fundamentos Da Matéria Organica Do SoloDocumento3 páginasFundamentos Da Matéria Organica Do SoloAlberto Do Nascimento Silva50% (4)
- A Fenomenologia de Husserl e suas críticas ao PositivismoDocumento14 páginasA Fenomenologia de Husserl e suas críticas ao PositivismoIgor FortunatoAinda não há avaliações
- MicrobiologiaDocumento4 páginasMicrobiologiaanderson.lima.1006Ainda não há avaliações
- Portfólio Individual Projeto de Extensão I - Negócios Imobiliários 2023 - Programa de Ação e Difusão CulturalDocumento1 páginaPortfólio Individual Projeto de Extensão I - Negócios Imobiliários 2023 - Programa de Ação e Difusão CulturalAlex NascimentoAinda não há avaliações
- E A Água Virou VinhoDocumento6 páginasE A Água Virou VinhoGiovanni GuimarãesAinda não há avaliações
- Apostila de CLPs - LadderDocumento40 páginasApostila de CLPs - Ladderpososviki80% (5)
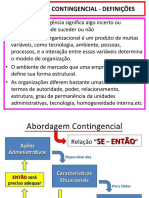
- 4 Slides Problema 04 Abordagem Contingencial Usado em T1Documento26 páginas4 Slides Problema 04 Abordagem Contingencial Usado em T1Soledad AlexandraAinda não há avaliações
- Ele Vai Te Pedir em Namoro em 30 DiasDocumento152 páginasEle Vai Te Pedir em Namoro em 30 DiasGabriela Gomes100% (11)
- Engenharia - Avaliação de Imóveis e Outros BensDocumento27 páginasEngenharia - Avaliação de Imóveis e Outros BensnaimeAinda não há avaliações
- Avaliação Diagnóstica (Proporcionalidade Direta)Documento2 páginasAvaliação Diagnóstica (Proporcionalidade Direta)luvieiradias6655Ainda não há avaliações
- Formula para Criar e Monetizar SitesDocumento22 páginasFormula para Criar e Monetizar SitesCarlos Júnior UchôaAinda não há avaliações