Você também pode gostar
- Apresentação 1Documento14 páginasApresentação 1sergio josimarAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Apostila PWMDocumento6 páginasApostila PWMMarcelo MoraesAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- O Que É PWM e Como Testar!Documento8 páginasO Que É PWM e Como Testar!nebulimedAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- PWM o Que É e para Que ServeDocumento13 páginasPWM o Que É e para Que ServeMoises FernandesAinda não há avaliações
- Modulação Por Largura de Pulso (PWM - Pulso Width Modulation)Documento3 páginasModulação Por Largura de Pulso (PWM - Pulso Width Modulation)Fagner AraujoAinda não há avaliações
- Lendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoNo EverandLendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoAinda não há avaliações
- PWMDocumento12 páginasPWMRui MendesAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- Manual PWM Completo (Mecatronicadegaragem - Blogspot.com)Documento6 páginasManual PWM Completo (Mecatronicadegaragem - Blogspot.com)Rodrigo CedrimAinda não há avaliações
- Experiências Com O Módulo Pwm Programado No ArduinoNo EverandExperiências Com O Módulo Pwm Programado No ArduinoAinda não há avaliações
- PWM Modulacao Por Largura de PulsoDocumento4 páginasPWM Modulacao Por Largura de PulsoLuiz SilvaAinda não há avaliações
- PWM - Pulse Width Modulation: FuncionamentoDocumento2 páginasPWM - Pulse Width Modulation: FuncionamentoJayrison PereiraAinda não há avaliações
- Manutenção e Consertos de Inversores de TensãoDocumento9 páginasManutenção e Consertos de Inversores de TensãoCláudio LimaAinda não há avaliações
- Relatorio Sim PWMDocumento3 páginasRelatorio Sim PWMruankarAinda não há avaliações
- Conversor DC/DC Boost InterleavedDocumento8 páginasConversor DC/DC Boost InterleavedThiago Carvalho RêgoAinda não há avaliações
- Conceito de Ciclo de TrabalhoDocumento4 páginasConceito de Ciclo de TrabalhoEduardo NascimentoAinda não há avaliações
- (Eletronica II) PWMDocumento5 páginas(Eletronica II) PWMLucasMoreiradeLacerdaAinda não há avaliações
- Professor: Saulo Rodrigo BenattiDocumento15 páginasProfessor: Saulo Rodrigo BenattiEmily Souza da SilvaAinda não há avaliações
- Led RGB Pic16f6268aDocumento14 páginasLed RGB Pic16f6268ajtxtbrAinda não há avaliações
- Circuitos Chopper - Wendel SantiagoDocumento5 páginasCircuitos Chopper - Wendel SantiagoWendel SantiagoAinda não há avaliações
- Apoio 004 - Inversores de Frequencia - Clube Da Eletronica PDFDocumento12 páginasApoio 004 - Inversores de Frequencia - Clube Da Eletronica PDFanon_656790980Ainda não há avaliações
- Fontes Chaveadas Funcionamento Newton BragaDocumento12 páginasFontes Chaveadas Funcionamento Newton BragaEder ProdAinda não há avaliações
- 6.2 Reguladores Por ChaveamentoDocumento26 páginas6.2 Reguladores Por ChaveamentoPatrick MenezesAinda não há avaliações
- Classificaçäo - ConversoresDocumento28 páginasClassificaçäo - ConversoresVinicius CavalcanteAinda não há avaliações
- Controle PWM de Motor DCDocumento4 páginasControle PWM de Motor DCxarlyAinda não há avaliações
- Controle PWM de Motor DC (MEC139)Documento3 páginasControle PWM de Motor DC (MEC139)Alex Sandro SausenAinda não há avaliações
- Relatório 3 Rev02Documento21 páginasRelatório 3 Rev02Plínio Da Silva CostaAinda não há avaliações
- Sinal PWMDocumento5 páginasSinal PWMignacio ortegaAinda não há avaliações
- ACQF - RespostasDocumento52 páginasACQF - RespostasSueli E FranciscoAinda não há avaliações
- 10 Circuitos Práticos Com Comparadores de TensãoDocumento21 páginas10 Circuitos Práticos Com Comparadores de TensãoLuiz SilvaAinda não há avaliações
- Como Funcionam As Fontes ChaveadasDocumento8 páginasComo Funcionam As Fontes ChaveadasReinaldo Oliveira100% (2)
- 9 - Controladores CaDocumento6 páginas9 - Controladores CaGUSTAVO OIAinda não há avaliações
- PWM Fabio Lunardi Gustavo Amaral PDFDocumento4 páginasPWM Fabio Lunardi Gustavo Amaral PDFFabio Lunardi AntunesAinda não há avaliações
- Eletronica Experimento Guia 5 2011 1Documento13 páginasEletronica Experimento Guia 5 2011 1Rodney RibeiroAinda não há avaliações
- O Que É PWM e para Que ServeDocumento9 páginasO Que É PWM e para Que ServeBruno CoutoAinda não há avaliações
- (Eletrônica II) PWM - SlideDocumento14 páginas(Eletrônica II) PWM - SlideLucasMoreiradeLacerdaAinda não há avaliações
- Notas de Aula PDFDocumento79 páginasNotas de Aula PDFvinicius.camattaAinda não há avaliações
- ABNT - NBR - Normaspara MonografiaDocumento18 páginasABNT - NBR - Normaspara MonografiaAlex MacedoAinda não há avaliações
- PWM Com 555Documento32 páginasPWM Com 555adrielecosta.g16Ainda não há avaliações
- De Volta Ao Básico - Os Fundamentos Dos Loops de Corrente de 4-20 MA - Precision DigitalDocumento8 páginasDe Volta Ao Básico - Os Fundamentos Dos Loops de Corrente de 4-20 MA - Precision DigitalapocalipcAinda não há avaliações
- Circuito BoostDocumento9 páginasCircuito BoostBruno FrezzarinAinda não há avaliações
- Fontes Digitais: Newton C. BragaDocumento4 páginasFontes Digitais: Newton C. BragaPaulo chagas paulo ratoAinda não há avaliações
- Acionamento de Cargas Por Ângulo de Fase e Por Trem-De-PulsoDocumento4 páginasAcionamento de Cargas Por Ângulo de Fase e Por Trem-De-PulsoCarlos OliveiraAinda não há avaliações
- Regulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationDocumento2 páginasRegulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationRei Dom Manuel IAinda não há avaliações
- AT1 e 2 T3Documento31 páginasAT1 e 2 T3Joaquim Nhama Manuel ChirariroAinda não há avaliações
- Acionamento de Gargas em AnguloDocumento3 páginasAcionamento de Gargas em Anguloluciano2004costa6510Ainda não há avaliações
- Guia para Experimentos de EletrônicaDocumento12 páginasGuia para Experimentos de EletrônicaRafael BarrosAinda não há avaliações
- Trabalho de Pesquisa Sobre Inversores de FrequênciaDocumento20 páginasTrabalho de Pesquisa Sobre Inversores de FrequênciatulioAinda não há avaliações
- Circuito de Correção de Tensão de Saída de Inversor Automático - Projetos de Circuitos CaseirosDocumento35 páginasCircuito de Correção de Tensão de Saída de Inversor Automático - Projetos de Circuitos CaseirosEndelAinda não há avaliações
- Controlo de Velocidade para Motores de Corrente AlternadaDocumento12 páginasControlo de Velocidade para Motores de Corrente Alternadazypb3fxAinda não há avaliações
- Inversor de FreqüênciaDocumento7 páginasInversor de FreqüênciaJordany SpaccaAinda não há avaliações
- Apresentação SApresentação Soft-Starter Revisadooft-Starter Revisado 1.1Documento11 páginasApresentação SApresentação Soft-Starter Revisadooft-Starter Revisado 1.1Gabriel Arthur SchroederAinda não há avaliações
- Calculando Uma Etapa Classe B - Push-Pul (M049)Documento4 páginasCalculando Uma Etapa Classe B - Push-Pul (M049)Lucio OliveiraAinda não há avaliações
- Relatório 6 Circuitos Elétricos I UFPIDocumento4 páginasRelatório 6 Circuitos Elétricos I UFPIJosé HenriqueAinda não há avaliações
- Aplicação Diferencial - 67-02Documento2 páginasAplicação Diferencial - 67-02Solange Antonio CarlosAinda não há avaliações
- Curriculo 111Documento2 páginasCurriculo 111sergio josimarAinda não há avaliações
- Aula 2 ExerxiciosDocumento23 páginasAula 2 Exerxiciossergio josimarAinda não há avaliações
- ChocolateDocumento6 páginasChocolatesergio josimarAinda não há avaliações
- Capa VanuzaDocumento6 páginasCapa Vanuzasergio josimarAinda não há avaliações
- Boasmaneirasemcasa 110630130302 Phpapp01Documento24 páginasBoasmaneirasemcasa 110630130302 Phpapp01sergio josimarAinda não há avaliações
- Dosificação Da 4 ClasseDocumento5 páginasDosificação Da 4 Classesergio josimar100% (1)
- Comprovativo 20230307 134222 787173827 SignedDocumento1 páginaComprovativo 20230307 134222 787173827 Signedsergio josimarAinda não há avaliações
- Física22-23 Dosificação7classeDocumento2 páginasFísica22-23 Dosificação7classesergio josimarAinda não há avaliações
- Dosificação - Ed. Musical 1 Classe 1 A 4 SEMANADocumento1 páginaDosificação - Ed. Musical 1 Classe 1 A 4 SEMANAsergio josimarAinda não há avaliações
- SEM 02 - Trabalho FinalDocumento6 páginasSEM 02 - Trabalho Finalsergio josimarAinda não há avaliações
- Pe Ddojal B2022-2024Documento24 páginasPe Ddojal B2022-2024sergio josimarAinda não há avaliações
- Dosificação 2 Classe 1 A 4 SEMANADocumento5 páginasDosificação 2 Classe 1 A 4 SEMANAsergio josimar100% (1)
- Estatuto Final 2Documento40 páginasEstatuto Final 2sergio josimarAinda não há avaliações
- INFO8 - AplicativosDocumento16 páginasINFO8 - Aplicativossergio josimarAinda não há avaliações
- Aula 4 SO e Ling. ProgDocumento48 páginasAula 4 SO e Ling. Progsergio josimarAinda não há avaliações
- Aplicada IIIDocumento15 páginasAplicada IIIHoracio Mendes GilAinda não há avaliações
- Pe Ddojal B2022-2024Documento24 páginasPe Ddojal B2022-2024sergio josimarAinda não há avaliações
- Info5 - WordDocumento17 páginasInfo5 - Wordsergio josimarAinda não há avaliações
- Electoquímica 2Documento2 páginasElectoquímica 2sergio josimarAinda não há avaliações
- Folhas AM Fundamentos de TelecomunicaçõesDocumento373 páginasFolhas AM Fundamentos de Telecomunicaçõessergio josimarAinda não há avaliações
- Estatuto Final 2Documento40 páginasEstatuto Final 2sergio josimarAinda não há avaliações
- Guia Didáctico de Matemática PDFDocumento87 páginasGuia Didáctico de Matemática PDFsergio josimarAinda não há avaliações
- Aula 2Documento14 páginasAula 2sergio josimarAinda não há avaliações
- Geometria Analítica Parte 07Documento2 páginasGeometria Analítica Parte 07sergio josimarAinda não há avaliações
- Guia Didáctico de Educação Moral e Cívica PDFDocumento56 páginasGuia Didáctico de Educação Moral e Cívica PDFsergio josimarAinda não há avaliações
- DEF 5835 01404 Teoria e Metodologia Da Ginástica PDFDocumento9 páginasDEF 5835 01404 Teoria e Metodologia Da Ginástica PDFsergio josimarAinda não há avaliações
- Produto Ginastica para Todos 1080x1920 v3 PDFDocumento24 páginasProduto Ginastica para Todos 1080x1920 v3 PDFsergio josimarAinda não há avaliações
- Ginástica I Bacharelado PDFDocumento2 páginasGinástica I Bacharelado PDFsergio josimarAinda não há avaliações
- Ibercusa Manu Completo 002 PDFDocumento91 páginasIbercusa Manu Completo 002 PDFTiago JesusAinda não há avaliações
- ManualDocumento122 páginasManualAnonymous fIQtTSl8bAinda não há avaliações
- História Da ProgramaçãoDocumento17 páginasHistória Da ProgramaçãoBennie HullAinda não há avaliações
- AfroDev Segunda SemanaDocumento155 páginasAfroDev Segunda SemanaZ. O.Ainda não há avaliações
- Apostila de Sistemas OperacionaisDocumento114 páginasApostila de Sistemas OperacionaisWesley Prata80% (5)
- Apostila Extensão COBOLDocumento12 páginasApostila Extensão COBOLLord_EnigmaAinda não há avaliações
- Manual Atos Expert BFDocumento39 páginasManual Atos Expert BFOseias Codignola0% (1)
- TC04Documento0 páginaTC04Nicollas FreitasAinda não há avaliações
- Fundamentos para ComputaçãoDocumento16 páginasFundamentos para ComputaçãoMarcela CardinalAinda não há avaliações
- Manual - WEG HMI APSDocumento10 páginasManual - WEG HMI APSMarcelo LescanoAinda não há avaliações
- Livro Digital 248 CLP Tema 2Documento11 páginasLivro Digital 248 CLP Tema 2Brasilio Cortes GuimaraesAinda não há avaliações
- Manual E3Documento342 páginasManual E3atlas_offzz100% (1)
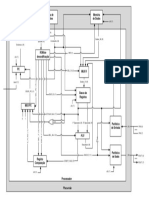
- Esquema ProcessadorDocumento1 páginaEsquema ProcessadorJuan SilvaAinda não há avaliações
- Apostila PHPDocumento54 páginasApostila PHPFábioHenriqueAinda não há avaliações
- Notas SSCPDocumento37 páginasNotas SSCPScribdTranslationsAinda não há avaliações
- Catalogo Fibra Optica2019 (1.0)Documento75 páginasCatalogo Fibra Optica2019 (1.0)Luis SilvaAinda não há avaliações
- Team Viewer Manual PTDocumento99 páginasTeam Viewer Manual PTCarlos Evandro PizzinatAinda não há avaliações
- Manual Geovision V8.3Documento486 páginasManual Geovision V8.3Sergio Junior100% (2)
- Threads - AtividadeDocumento2 páginasThreads - AtividadeKarolyne MunizAinda não há avaliações
- Técnicas de Programação - Texto Estruturado - SENAIDocumento10 páginasTécnicas de Programação - Texto Estruturado - SENAIHicaro Souza IDAinda não há avaliações
- A-Classificacao de SoftwaresDocumento9 páginasA-Classificacao de SoftwaresFrancisco Manuel JoaoAinda não há avaliações
- Como Formatar e Instalar o Windows 7 Passo A PassoDocumento10 páginasComo Formatar e Instalar o Windows 7 Passo A PassoLuciaMouraAinda não há avaliações
- Pmuc0100200 - Manual Rion+ Hi TecnologicaDocumento33 páginasPmuc0100200 - Manual Rion+ Hi TecnologicaAlexandre PennaAinda não há avaliações
- Aula3 O ComputadorDocumento78 páginasAula3 O ComputadorDgeison Alexander CarvalhoAinda não há avaliações
- Artigo Sobre Escalonamento de ProcessosDocumento12 páginasArtigo Sobre Escalonamento de ProcessosRenan Felipe0% (1)
- Aula 04 Fusíveis e Mplab Renata MercanteDocumento14 páginasAula 04 Fusíveis e Mplab Renata MercanteDouglas Silva Dos Santos SouzaAinda não há avaliações
- Curriculum Do Marco AntonioDocumento1 páginaCurriculum Do Marco Antonioinstrutor.marcoAinda não há avaliações
- AlgoritmosDocumento57 páginasAlgoritmosJefferson AraujoAinda não há avaliações
- Aula 1Documento14 páginasAula 1ClaudioTRodriguesAinda não há avaliações
- Catálogo MXT 2022Documento82 páginasCatálogo MXT 2022Davi SiqueiraAinda não há avaliações
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Dimensionamento e Planejamento de Máquinas e Implementos AgrícolasNo EverandDimensionamento e Planejamento de Máquinas e Implementos AgrícolasNota: 1 de 5 estrelas1/5 (2)
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Eletricista Residencial E PredialNo EverandEletricista Residencial E PredialNota: 3 de 5 estrelas3/5 (1)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- IoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNo EverandIoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNota: 4 de 5 estrelas4/5 (2)
- Análise de Dados para Negócios: Torne-se um Mestre em Análise de DadosNo EverandAnálise de Dados para Negócios: Torne-se um Mestre em Análise de DadosAinda não há avaliações
- Modelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisNo EverandModelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisAinda não há avaliações