Você também pode gostar
- Construção de espectrofotômetro UV-VIS multicanal e aplicações no estudo da cinética de reações químicas: uma proposta de plataforma analítica e educacionalNo EverandConstrução de espectrofotômetro UV-VIS multicanal e aplicações no estudo da cinética de reações químicas: uma proposta de plataforma analítica e educacionalAinda não há avaliações
- Análise elétrica de impedimentos programados de sistemas elétricos utilizando fluxo de potência e Rough SetsNo EverandAnálise elétrica de impedimentos programados de sistemas elétricos utilizando fluxo de potência e Rough SetsAinda não há avaliações
- Sensores MEMS e Suas AplicaçõesDocumento6 páginasSensores MEMS e Suas AplicaçõesHenrique Batista da SilvaAinda não há avaliações
- Sensor Acelerometro F-E-M-ODocumento10 páginasSensor Acelerometro F-E-M-OperezamorimAinda não há avaliações
- Eletromiografia de Superfície Aplicada À Próteses de Membro SuperiorDocumento7 páginasEletromiografia de Superfície Aplicada À Próteses de Membro SuperiorBrunaAinda não há avaliações
- Artigo Sisto-CabralDocumento8 páginasArtigo Sisto-CabralInstituto Mauá de TecnologiaAinda não há avaliações
- Injeão 2Documento36 páginasInjeão 2Douglas CarvalhoAinda não há avaliações
- 756 2429 1 PBDocumento11 páginas756 2429 1 PBRogerAinda não há avaliações
- Trabalho de Fisica 1Documento19 páginasTrabalho de Fisica 1Manzur Ussene SulaimanaAinda não há avaliações
- Relatório MevDocumento6 páginasRelatório MevRayla SáAinda não há avaliações
- Ferreira AndersonHenriqueRodrigues MDocumento151 páginasFerreira AndersonHenriqueRodrigues MGerardo GonzaloAinda não há avaliações
- Tese - Janderson Rocha RodriguesDocumento0 páginaTese - Janderson Rocha Rodriguesjanderson13Ainda não há avaliações
- Sensores Capacitivos e IndutivosDocumento17 páginasSensores Capacitivos e IndutivosSimone AnzilieroAinda não há avaliações
- Microscópio CompostoDocumento9 páginasMicroscópio CompostoIzaias Campos da PaixãoAinda não há avaliações
- POTENCIÔMETRODocumento3 páginasPOTENCIÔMETROLucas GpAinda não há avaliações
- Relatório 1 - Sensores - Rafael de SáDocumento14 páginasRelatório 1 - Sensores - Rafael de SáRafael de saAinda não há avaliações
- Girassol Eletronico 15-1Documento29 páginasGirassol Eletronico 15-1DudurebaAinda não há avaliações
- Análise Comparativa Da Tecnologia Fotovoltaica Aplicada em Microgeração Fixa e SistemaDocumento6 páginasAnálise Comparativa Da Tecnologia Fotovoltaica Aplicada em Microgeração Fixa e SistemaGabriel MessiasAinda não há avaliações
- Trab - CHP 1ºbim - Luis Gustavo - 3ºADocumento16 páginasTrab - CHP 1ºbim - Luis Gustavo - 3ºAGustavo VieiraAinda não há avaliações
- Automação e Controle Industrial - Aula 02Documento14 páginasAutomação e Controle Industrial - Aula 02renato Sousa Mendes de QueirozAinda não há avaliações
- Circuito de Eletromiografia de Superfície ResponsivoDocumento5 páginasCircuito de Eletromiografia de Superfície ResponsivojlourencaoAinda não há avaliações
- Magnetismo CotidianoDocumento2 páginasMagnetismo CotidianoJaiani IachaAinda não há avaliações
- Situaçao de AprendizagemDocumento7 páginasSituaçao de AprendizagemGustavo Melo Silva De PaulaAinda não há avaliações
- Artigo Aceito IBRACON2022Documento13 páginasArtigo Aceito IBRACON2022Daniel Veiga AdolfsAinda não há avaliações
- Sensores Eletroquímicos Considerações Sobre Mecanismos de Funcionamento e Aplicações No Monitoramento de Espécies Químicas em Ambientes MicroscópicosDocumento8 páginasSensores Eletroquímicos Considerações Sobre Mecanismos de Funcionamento e Aplicações No Monitoramento de Espécies Químicas em Ambientes MicroscópicosrcowckAinda não há avaliações
- GLEDSON - Atividade 2Documento13 páginasGLEDSON - Atividade 2diovane attilio cecchettAinda não há avaliações
- Sistema de Rastreador SolarDocumento13 páginasSistema de Rastreador SolarBruna AssisAinda não há avaliações
- Ep2 Motor EléctricoDocumento22 páginasEp2 Motor EléctricoEduardo Guambe JúniorAinda não há avaliações
- Apostila Transdutores - Incluindo PressaoDocumento103 páginasApostila Transdutores - Incluindo PressaoMatthew WilliamsAinda não há avaliações
- Aula Magna. Prof. AssociadoDocumento12 páginasAula Magna. Prof. AssociadoCarlos Samuel QuimbenzeAinda não há avaliações
- Emg PDFDocumento29 páginasEmg PDFGabriel OliveiraAinda não há avaliações
- Aula Prática 01Documento19 páginasAula Prática 01Gustavo DomingosAinda não há avaliações
- Los Microacelerometros en La ActualidadDocumento11 páginasLos Microacelerometros en La ActualidadLuis Gustavo Teixeira CamposAinda não há avaliações
- Actividade Práctica em Grupo 01 (Prazo 27 03 2023 v1) - 1Documento7 páginasActividade Práctica em Grupo 01 (Prazo 27 03 2023 v1) - 1Dj-Dénny DjrAinda não há avaliações
- A Influencia Do Clima Tropical - Celulas.PV2Documento12 páginasA Influencia Do Clima Tropical - Celulas.PV2Carlos Samuel QuimbenzeAinda não há avaliações
- Lou Auto 4Documento17 páginasLou Auto 4lourencov9almeidaAinda não há avaliações
- 77879Documento111 páginas77879williamateugeniodiazAinda não há avaliações
- Todos Os Tipos de SensoresDocumento9 páginasTodos Os Tipos de Sensoresdevifanta86% (7)
- Microscopia EletrônicaDocumento12 páginasMicroscopia Eletrônicabrgg.86.rpgAinda não há avaliações
- Apostila TransdutoresDocumento112 páginasApostila TransdutoresMestddl100% (1)
- Como Funcionam Os Foto-Diodos (ART1181)Documento5 páginasComo Funcionam Os Foto-Diodos (ART1181)torres_emerson5975Ainda não há avaliações
- Relatório Final - Matheus MarkiesDocumento30 páginasRelatório Final - Matheus MarkiesMatheus MarkiesAinda não há avaliações
- Analise Dos Beneficios de Medicoes Fasoriais SincrDocumento7 páginasAnalise Dos Beneficios de Medicoes Fasoriais Sincrgean de medeiros vidalAinda não há avaliações
- Slide Da Unidade - Sensoriamento Remoto IDocumento31 páginasSlide Da Unidade - Sensoriamento Remoto Iengetor4Ainda não há avaliações
- Maquinas e Sistemas - Modulo 5Documento94 páginasMaquinas e Sistemas - Modulo 5Luiz Alberto LamogliaAinda não há avaliações
- 09071620092012introducao A Microscopia Aula 4Documento11 páginas09071620092012introducao A Microscopia Aula 4Fabiano SantosAinda não há avaliações
- 1554-Arquivo Do Trabalho-6738-1-10-20201103Documento11 páginas1554-Arquivo Do Trabalho-6738-1-10-20201103Gabriel MessiasAinda não há avaliações
- Trabalho MicroscópioDocumento9 páginasTrabalho MicroscópioJackson DamiãoAinda não há avaliações
- Lucas Rodrigues - Relatório Sistema Supervisório de Maq. Rot. - EletrotécnicaDocumento4 páginasLucas Rodrigues - Relatório Sistema Supervisório de Maq. Rot. - EletrotécnicaLucas RodriguesAinda não há avaliações
- Trabalho PlínioDocumento23 páginasTrabalho PlínioEdlásio HenriquesAinda não há avaliações
- MecanicaDocumento3 páginasMecanicaSaul NascimentoAinda não há avaliações
- Curso Operação e Manutenção de Usinas Fotovoltaicas JUN2020Documento418 páginasCurso Operação e Manutenção de Usinas Fotovoltaicas JUN2020Bruno ViniciusAinda não há avaliações
- Frenagem Corrente de FoucaultDocumento8 páginasFrenagem Corrente de FoucaultFred SilvaAinda não há avaliações
- Artigo Placas SolaresDocumento5 páginasArtigo Placas SolaresRafael Saraiva CarvalhoAinda não há avaliações
- Sistema Eletrônico para Monitorar A Operação Dos Motores Elétricos de Indução Na IndústriaDocumento17 páginasSistema Eletrônico para Monitorar A Operação Dos Motores Elétricos de Indução Na IndústriaBoladeiro Das RuasAinda não há avaliações
- Laco Indutivo e Suas Aplicacoes TrabalhoDocumento20 páginasLaco Indutivo e Suas Aplicacoes TrabalhoRoberto DiasAinda não há avaliações
- Artigo+134+ +Rastreador+Solar+Controlado+Por+ArduinoDocumento4 páginasArtigo+134+ +Rastreador+Solar+Controlado+Por+ArduinoGustavo JúniorAinda não há avaliações
- Pesquisa Microscópio LDocumento7 páginasPesquisa Microscópio LLarissa AndradeAinda não há avaliações
- O Que É o Sensor - AtuadorDocumento2 páginasO Que É o Sensor - AtuadormiAinda não há avaliações
- Livro - Artigo , Séries Idéias - Nanorrôbos,i.a, Em Máquinas AgriculasNo EverandLivro - Artigo , Séries Idéias - Nanorrôbos,i.a, Em Máquinas AgriculasAinda não há avaliações
- TCC Murilo de Ávila DilliDocumento132 páginasTCC Murilo de Ávila DilliJadiel SilvaAinda não há avaliações
- AduDocumento2 páginasAdumh4347652Ainda não há avaliações
- Matrizes Do Pensamento Iii: Psicologia CognitivaDocumento17 páginasMatrizes Do Pensamento Iii: Psicologia Cognitivastephane larissaAinda não há avaliações
- Manual 60.03.02.257-r0 Centrix 4-12 PDFDocumento104 páginasManual 60.03.02.257-r0 Centrix 4-12 PDFMarcos Alessandro Santana SantosAinda não há avaliações
- Privacidade Nas Redes SociaisDocumento2 páginasPrivacidade Nas Redes SociaisCláudia PereiraAinda não há avaliações
- Orc 8349 - 7515j - SojamilDocumento2 páginasOrc 8349 - 7515j - SojamilGuilherme Tve NaziazenoAinda não há avaliações
- Manual Instalacao Do Assinador Digital Arisp W7 and VistaDocumento7 páginasManual Instalacao Do Assinador Digital Arisp W7 and VistaalexAinda não há avaliações
- FIAT Toro 2019 ManualUsuario PDFDocumento362 páginasFIAT Toro 2019 ManualUsuario PDFjadr2654% (13)
- Modelo de Ltcat 01Documento65 páginasModelo de Ltcat 01Jack SomensiAinda não há avaliações
- Exercicios Complementares SIDocumento4 páginasExercicios Complementares SIJoice BezerraAinda não há avaliações
- Manual Manutenção Oxicatalisador Diesel Tipo ColmeiaDocumento1 páginaManual Manutenção Oxicatalisador Diesel Tipo ColmeiaBlas ViniciusAinda não há avaliações
- Simulado 02 Pmpe HD Cursos Com GabaritoDocumento20 páginasSimulado 02 Pmpe HD Cursos Com GabaritoEduardo FelipeAinda não há avaliações
- Programando C#Documento5 páginasProgramando C#Luperciano NetoAinda não há avaliações
- Proficiência DuolingoDocumento20 páginasProficiência Duolingoeu.heduAinda não há avaliações
- IntArt U3Documento34 páginasIntArt U3Flavio AnunciatoAinda não há avaliações
- Significados de Linguística PragmáticaDocumento16 páginasSignificados de Linguística PragmáticaVinícius Adriano de FreitasAinda não há avaliações
- Pascal UfscDocumento85 páginasPascal UfscArturAinda não há avaliações
- Manual Addtech MC16 PDFDocumento62 páginasManual Addtech MC16 PDFCaroline CoelherAinda não há avaliações
- Carregadores de Baterias - Eletrônica para IniciantesDocumento4 páginasCarregadores de Baterias - Eletrônica para Iniciantesandrelessa_01Ainda não há avaliações
- POP GQ 000 - Elaboração de Procedimentos Rev. 05Documento6 páginasPOP GQ 000 - Elaboração de Procedimentos Rev. 05Elizabeth WalshAinda não há avaliações
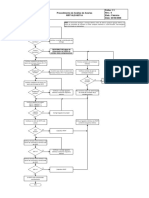
- Procedimento de Análise de Avarias - RIFF HLD18371A HitachiDocumento1 páginaProcedimento de Análise de Avarias - RIFF HLD18371A HitachijeffersonAinda não há avaliações
- A Evolução Dos TelemóveisDocumento8 páginasA Evolução Dos Telemóveismarina machadoAinda não há avaliações
- EletrohidropneumáticaDocumento5 páginasEletrohidropneumáticaPaulo HenriqueAinda não há avaliações
- Gerenciamento de Manutenção em Equipamentos HospitalaresDocumento379 páginasGerenciamento de Manutenção em Equipamentos HospitalaresRolando PerezAinda não há avaliações
- Apostila 2016 para AlunosDocumento78 páginasApostila 2016 para AlunosjoaoAinda não há avaliações
- Simulado RESPOSTASDocumento3 páginasSimulado RESPOSTASfabricioLeonardoAinda não há avaliações
- MANUAL DE UTILIZAcaO DO DRONE v28-03Documento33 páginasMANUAL DE UTILIZAcaO DO DRONE v28-03Principe OicramAinda não há avaliações
- Forma Canonica 11 PDFDocumento15 páginasForma Canonica 11 PDFAnthonny Gabryell LimaAinda não há avaliações
- Template ACDDocumento77 páginasTemplate ACDPaulo SilvaAinda não há avaliações
- Apresentação ISO 9001 + SCRUMDocumento6 páginasApresentação ISO 9001 + SCRUMliviablAinda não há avaliações