Você também pode gostar
- 1 - SensoresDocumento24 páginas1 - SensoresIgor BarbosaAinda não há avaliações
- Sensores Industriais - Fundamentos e Aplicações PDFDocumento23 páginasSensores Industriais - Fundamentos e Aplicações PDFFelipe Postigo100% (1)
- Sensores Industriais PDFDocumento51 páginasSensores Industriais PDFnascostaAinda não há avaliações
- Aula4 SensoresDocumento18 páginasAula4 Sensoresctt7rxy52yAinda não há avaliações
- Hardware DarioDocumento58 páginasHardware DarioLAURO AUGUSTOAinda não há avaliações
- Aula 4 - IM 2021 - Condicionadores de SinaisDocumento29 páginasAula 4 - IM 2021 - Condicionadores de SinaisCelso Luis CarvalhoAinda não há avaliações
- XC207PD00 PT B1 RevBDocumento8 páginasXC207PD00 PT B1 RevBfelltec felltecAinda não há avaliações
- Sensores e TransdutoresDocumento67 páginasSensores e TransdutoresjeffersansAinda não há avaliações
- IM - Tema - 3 - Processamento de Sinais 12Documento43 páginasIM - Tema - 3 - Processamento de Sinais 12Sobre tudo e menos nadaAinda não há avaliações
- Características Dos Instrumentos de MediçãoDocumento42 páginasCaracterísticas Dos Instrumentos de MediçãoGABRIELA VIEIRA LIMAAinda não há avaliações
- Conceitos Básicos de InstrumentaçãoDocumento42 páginasConceitos Básicos de InstrumentaçãoVisitanteAinda não há avaliações
- SensoresDocumento21 páginasSensoresjsasistemasAinda não há avaliações
- Sensores e AtuadoresDocumento69 páginasSensores e AtuadoresRafael AntonioAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicAinda não há avaliações
- Interfaces Sensores AtuadoresDocumento39 páginasInterfaces Sensores AtuadoresBruno de Paula Teixeira BravoAinda não há avaliações
- DAQ Cap4 SensoresDocumento23 páginasDAQ Cap4 SensoresRicardo milosAinda não há avaliações
- Apresentação de SensoresDocumento75 páginasApresentação de SensoresTiago KurmannAinda não há avaliações
- Sensores Atuadores e VálvulasDocumento21 páginasSensores Atuadores e VálvulasRodolfo ChagasAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoAinda não há avaliações
- Aquisição, Condicionamento e Processamento de DadosDocumento12 páginasAquisição, Condicionamento e Processamento de Dadosrfaelengelet27Ainda não há avaliações
- Redes para Automação Industrial. Capítulo 1 - Automação Industrial. Luiz Affonso Guedes DCA-CT-UFRNDocumento48 páginasRedes para Automação Industrial. Capítulo 1 - Automação Industrial. Luiz Affonso Guedes DCA-CT-UFRNWesley Reis CorreiaAinda não há avaliações
- RedesInd - 03 - Medicao de Grandezas Mecânicas 2023.2Documento59 páginasRedesInd - 03 - Medicao de Grandezas Mecânicas 2023.2Mauricio Dos SantosAinda não há avaliações
- Apostila Sensores Conceitos Fundamentais CorrigidoDocumento9 páginasApostila Sensores Conceitos Fundamentais CorrigidoMarcos TononAinda não há avaliações
- 03-Transmissores Pressão SmarDocumento110 páginas03-Transmissores Pressão SmarMarcos Vinicius Santos souzaAinda não há avaliações
- 03-Transmissores Pressão SmarDocumento110 páginas03-Transmissores Pressão SmarFabricio Eduardo PereiraAinda não há avaliações
- Detector de Fumaça FAP 425 O-RDocumento4 páginasDetector de Fumaça FAP 425 O-RProjetos Riber FireAinda não há avaliações
- EL65F - Sensores e Atuadores - WebDocumento2 páginasEL65F - Sensores e Atuadores - WebpatricioAinda não há avaliações
- Sistemas de MediçãoDocumento23 páginasSistemas de Mediçãop.iscardoso1210Ainda não há avaliações
- CAI1 Apr A01 - Noções de Automação e ControleDocumento24 páginasCAI1 Apr A01 - Noções de Automação e ControleMatheus Aller MartinsAinda não há avaliações
- Guia de Produtos 2022 - CompactadoDocumento38 páginasGuia de Produtos 2022 - CompactadosilviaAinda não há avaliações
- Sensor Indutivo - O Que É e Como FuncionaDocumento6 páginasSensor Indutivo - O Que É e Como FuncionaMAXWELL LUEMBAAinda não há avaliações
- Teoria SensoresDocumento18 páginasTeoria SensoresDario Cortez ParéAinda não há avaliações
- Sensor de InclinaçãoDocumento13 páginasSensor de InclinaçãoDimas De Abreu LuzAinda não há avaliações
- Sistemas De Aquisição E Monitoração De Dados Remotos Aplicados Na Indústria 4.0No EverandSistemas De Aquisição E Monitoração De Dados Remotos Aplicados Na Indústria 4.0Ainda não há avaliações
- Trabalho de Medições IndustriaisDocumento18 páginasTrabalho de Medições IndustriaisGA LightAinda não há avaliações
- SENSORES Industriais - ApresDocumento13 páginasSENSORES Industriais - ApresNilton Copelo dos SantosAinda não há avaliações
- Sensores e AtuadoresDocumento48 páginasSensores e Atuadoresrfaelengelet27Ainda não há avaliações
- 10-Projetos de ArduinoDocumento45 páginas10-Projetos de ArduinoEliel Souza100% (3)
- Livro Digital 249 Elementos de Automação Tema 2Documento30 páginasLivro Digital 249 Elementos de Automação Tema 2gustavo landimAinda não há avaliações
- Aula 3 - Sistemas de Controle e Sinais PDFDocumento64 páginasAula 3 - Sistemas de Controle e Sinais PDFMilene OliveiraAinda não há avaliações
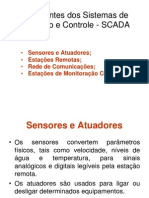
- Componentes Dos Sistemas de Supervisão e ControleDocumento22 páginasComponentes Dos Sistemas de Supervisão e Controlejoaofelipe.msAinda não há avaliações
- Curso Sensores e Transdutores IDocumento45 páginasCurso Sensores e Transdutores ILuan CrozattiAinda não há avaliações
- Técnicas de MedidaDocumento16 páginasTécnicas de MedidaRenato Feliciano OliveiraAinda não há avaliações
- Tecnicas SensoreamentoDocumento43 páginasTecnicas SensoreamentoedrodAinda não há avaliações
- Sensores PPT 2Documento23 páginasSensores PPT 2Ingryd Vieira SeixasAinda não há avaliações
- Sensores Industriais2Documento14 páginasSensores Industriais2Fabio SnpAinda não há avaliações
- 2instrumentacao e Dispositivos Medicos Unidade IIDocumento40 páginas2instrumentacao e Dispositivos Medicos Unidade IIAndré PhelpsAinda não há avaliações
- Medidor de Consumo de CombustívelDocumento15 páginasMedidor de Consumo de CombustívelJorge ViniciusAinda não há avaliações
- Pressão AbramanDocumento76 páginasPressão AbramanLuana MylenaAinda não há avaliações
- Capítulo 4 - Condicionadores de SinalDocumento21 páginasCapítulo 4 - Condicionadores de SinalJoão Lourenço CussondamaAinda não há avaliações
- Apontamentos de MedidasDocumento15 páginasApontamentos de MedidaspaulovalorAinda não há avaliações
- Apostila Sensores de ProximidadeDocumento28 páginasApostila Sensores de ProximidadeAlexandre PeradellesAinda não há avaliações
- Zyggot TemperaturaDocumento4 páginasZyggot Temperaturablutrafos123Ainda não há avaliações
- Modulos ArduinoDocumento21 páginasModulos ArduinoRaimundo Mendes Eliane Vogado100% (1)
- Manual Conjunto Ir Digital 1 0 600 PDFDocumento6 páginasManual Conjunto Ir Digital 1 0 600 PDFEduardo O. CastellaniAinda não há avaliações
- Monitorando Um Hidrômetro Com O Pic E Android Programado No App InventorNo EverandMonitorando Um Hidrômetro Com O Pic E Android Programado No App InventorAinda não há avaliações
- Formulário Exercicios 02 Maquinas IDocumento2 páginasFormulário Exercicios 02 Maquinas IChristian PaulAinda não há avaliações
- EXERC Maquinas Eletricas Exerc 01Documento2 páginasEXERC Maquinas Eletricas Exerc 01Christian PaulAinda não há avaliações
- Maquinas Elétricos I 03 MER Favinci 2018Documento16 páginasMaquinas Elétricos I 03 MER Favinci 2018Christian PaulAinda não há avaliações
- EXERC Maquinas Eletricas Exerc 01Documento2 páginasEXERC Maquinas Eletricas Exerc 01Christian PaulAinda não há avaliações
- Maquinas Elétricos CC 01 Favinci 2019Documento29 páginasMaquinas Elétricos CC 01 Favinci 2019Christian PaulAinda não há avaliações
- Aula 2 - MedicaoDocumento66 páginasAula 2 - MedicaoChristian PaulAinda não há avaliações
- GTD - 10 - 2018 - 2 - Equipamentos de CompensacaoDocumento22 páginasGTD - 10 - 2018 - 2 - Equipamentos de CompensacaoChristian PaulAinda não há avaliações
- GTD - 03 - 2018 - 2 - Sistemas de GeraçãoDocumento62 páginasGTD - 03 - 2018 - 2 - Sistemas de GeraçãoChristian PaulAinda não há avaliações
- Aula 1 - AtuadoresDocumento25 páginasAula 1 - AtuadoresChristian PaulAinda não há avaliações
- GTD 05 2018 2 - Geração HidrelétricaDocumento48 páginasGTD 05 2018 2 - Geração HidrelétricaChristian PaulAinda não há avaliações
- AULA 02 - KirchhoffDocumento2 páginasAULA 02 - KirchhoffChristian PaulAinda não há avaliações
- Atividade ParcialDocumento1 páginaAtividade ParcialChristian PaulAinda não há avaliações
- Tabela de ComparaçãoDocumento1 páginaTabela de ComparaçãoChristian PaulAinda não há avaliações
- Lista de Exercícios - 3Documento6 páginasLista de Exercícios - 3Christian PaulAinda não há avaliações
- Trabalho Obras de TerraDocumento7 páginasTrabalho Obras de TerraJennifer Dal PizzolAinda não há avaliações
- Guia Web Energy - EcoxpertDocumento86 páginasGuia Web Energy - EcoxpertAlex Dos SantosAinda não há avaliações
- Ofício 19-24 Center CopiasDocumento2 páginasOfício 19-24 Center Copiasdavid.pintoAinda não há avaliações
- Lei Complementar 112 2018 de Feira de Santana BADocumento14 páginasLei Complementar 112 2018 de Feira de Santana BAAnaAinda não há avaliações
- Questoes de Direito Penal e Processual PenalDocumento163 páginasQuestoes de Direito Penal e Processual Penalrodrigues junior100% (1)
- Historico 201010012864 PDFDocumento4 páginasHistorico 201010012864 PDFIraci Josê SilvaAinda não há avaliações
- Ferramentas de Analise ErgonomicaDocumento10 páginasFerramentas de Analise ErgonomicaDaniel SoaresAinda não há avaliações
- Manual de Assistência Técnica AccuaDocumento41 páginasManual de Assistência Técnica AccuaOlivio Gomes MachadoAinda não há avaliações
- Edital #02.2020 - Ppgec - PadtDocumento11 páginasEdital #02.2020 - Ppgec - PadtLúcio BarbozaAinda não há avaliações
- Muro TerraeDocumento6 páginasMuro TerraeFabricio ParkerAinda não há avaliações
- Plano de Inspeção e Manutenção-1Documento50 páginasPlano de Inspeção e Manutenção-1Pedro GermanoAinda não há avaliações
- Modelo de DiagnósticoDocumento39 páginasModelo de DiagnósticobotocordeluaAinda não há avaliações
- Atividades de História Sobre A Data de Nascimento e AcontecimentosDocumento13 páginasAtividades de História Sobre A Data de Nascimento e AcontecimentosLuan Carlos Almada BragaAinda não há avaliações
- Recibo Do Pagador: Parcela 5/10Documento1 páginaRecibo Do Pagador: Parcela 5/10jdcandidoAinda não há avaliações
- Relatório - CGUDocumento4 páginasRelatório - CGUWanderley do nascimento araujo WanderleyAinda não há avaliações
- Resumão - Capítulo 01 - KUROSEDocumento7 páginasResumão - Capítulo 01 - KUROSEJanderson SilvaAinda não há avaliações
- Casos Práticos Lei Da ConcorrênciaDocumento9 páginasCasos Práticos Lei Da ConcorrênciaCatarina RibeiroAinda não há avaliações
- Alessandro de Matos Lickunas - Pesquisa GoogleDocumento1 páginaAlessandro de Matos Lickunas - Pesquisa GoogleastrotrendsnovaeraAinda não há avaliações
- Determining The Cost-Benefits of ErgonomicsDocumento9 páginasDetermining The Cost-Benefits of ErgonomicsAdrianeAinda não há avaliações
- ArduinoDocumento106 páginasArduinoVitor Renato A. AndradeAinda não há avaliações
- Atividade PráticaDocumento2 páginasAtividade PráticaKamilla Alcantara50% (2)
- Biotecnologia Na Produção de Alimentos e Os Benefícios de Seu Uso PDFDocumento40 páginasBiotecnologia Na Produção de Alimentos e Os Benefícios de Seu Uso PDFeusebio macuacuaAinda não há avaliações
- Módulo 3 - Planejamento EstratégicoDocumento59 páginasMódulo 3 - Planejamento Estratégicojan_fauAinda não há avaliações
- Lista de Exercício Fresamento CNC - 2017Documento9 páginasLista de Exercício Fresamento CNC - 2017AndycaferAinda não há avaliações
- Manual Salao BelezaDocumento3 páginasManual Salao BelezaLarissa LagoAinda não há avaliações
- Solução de Problemas Do Processador de Gráficos (GPU) Do Photoshop e Drivers Da Placa de VídeoDocumento1 páginaSolução de Problemas Do Processador de Gráficos (GPU) Do Photoshop e Drivers Da Placa de VídeolaraAinda não há avaliações
- APR Substituição Do GeradorDocumento4 páginasAPR Substituição Do GeradorKadu BoscardimAinda não há avaliações
- Informe Bolsa Familia N 13Documento6 páginasInforme Bolsa Familia N 13Jonatas costa viegasAinda não há avaliações
- História Do CanadáDocumento3 páginasHistória Do CanadáMarília GrazielaAinda não há avaliações
- AGEPEN-CE - Agente Penitenciário 384 PGS NOVA-1 PDFDocumento384 páginasAGEPEN-CE - Agente Penitenciário 384 PGS NOVA-1 PDFCharlly Ribeiro100% (1)