Você também pode gostar
- Elevação Artificial Por Bombeio MecânicoNo EverandElevação Artificial Por Bombeio MecânicoAinda não há avaliações
- Engenharia Automotiva - Torque e PotênciaDocumento47 páginasEngenharia Automotiva - Torque e PotênciaMikhaél Braga MeinkeAinda não há avaliações
- Aula 03Documento38 páginasAula 03rodolfoAinda não há avaliações
- Aula 04Documento54 páginasAula 04rodolfoAinda não há avaliações
- Apresentação Aula 01Documento46 páginasApresentação Aula 01rodolfoAinda não há avaliações
- Projeto e Metodologia de SuspensãoDocumento7 páginasProjeto e Metodologia de SuspensãoMateus Brener De SáAinda não há avaliações
- 2 - Velocidade Crítica Lateral para AcoplamentosDocumento7 páginas2 - Velocidade Crítica Lateral para AcoplamentosRomario GomesAinda não há avaliações
- Aula 04 - Vídeo AulaDocumento52 páginasAula 04 - Vídeo AulaEmília Catarina PassosAinda não há avaliações
- Cambio PDFDocumento46 páginasCambio PDFReginaldo SoaresAinda não há avaliações
- Projeto de Balancim Monochoque de SuspenDocumento7 páginasProjeto de Balancim Monochoque de SuspenTalles OliveiraAinda não há avaliações
- Estradas - 2 ParteDocumento16 páginasEstradas - 2 Parteweezylaras100% (1)
- Instruções de Instalação P. Todos PDFDocumento27 páginasInstruções de Instalação P. Todos PDFFabio JuniorAinda não há avaliações
- Aula 07 - SuperelevaçãoDocumento43 páginasAula 07 - Superelevaçãolucao sozeAinda não há avaliações
- Projeto de EstradasDocumento77 páginasProjeto de EstradasFelipe MeloAinda não há avaliações
- Suspensão Do Motor - Alinhamento Do Motor - Transmissão - To PDFDocumento27 páginasSuspensão Do Motor - Alinhamento Do Motor - Transmissão - To PDFNelson Júnior100% (1)
- Sistema de Transmissão de PotênciaDocumento79 páginasSistema de Transmissão de PotênciaSergio Alves100% (1)
- SET AULA 8 - Rodas e TrilhosDocumento17 páginasSET AULA 8 - Rodas e Trilhosadrianomc25Ainda não há avaliações
- Aula3 2020Documento49 páginasAula3 2020Cesar JimenezAinda não há avaliações
- SuperlarguraDocumento9 páginasSuperlarguraGustavoAinda não há avaliações
- Eng Automotiva Aula 10Documento52 páginasEng Automotiva Aula 10Matheus BolandiniAinda não há avaliações
- 2 - Curso de Conversão de Veículos Eletricos Puga v6 Nov 2021Documento104 páginas2 - Curso de Conversão de Veículos Eletricos Puga v6 Nov 2021Maurício CazagrandeAinda não há avaliações
- Sime Freio EletromagneticoDocumento40 páginasSime Freio Eletromagneticolcasagrande75% (4)
- Manualeng PDFDocumento130 páginasManualeng PDFPauloAinda não há avaliações
- Artigo TFG II - Projeto de Barra Estabilizadora Traseira para o Veículo Baja SaeDocumento27 páginasArtigo TFG II - Projeto de Barra Estabilizadora Traseira para o Veículo Baja SaeAlessander SchmitzAinda não há avaliações
- Dinamica em CurvaDocumento19 páginasDinamica em Curva2223290Ainda não há avaliações
- Conforto - VibraçãoDocumento39 páginasConforto - VibraçãoGabriel CorreiaAinda não há avaliações
- Amade Colete22222222222222222222222Documento18 páginasAmade Colete22222222222222222222222RAFAEL JOSE MOLIDE JUNIORAinda não há avaliações
- NT 177Documento13 páginasNT 177Fabi Melo100% (1)
- Freios EletromagnéticosDocumento40 páginasFreios Eletromagnéticosricardotefaria100% (2)
- Tradicional 2423KDocumento2 páginasTradicional 2423KWilliam da Silva MarquesAinda não há avaliações
- Proj7 Perfil LongitudinalDocumento13 páginasProj7 Perfil LongitudinalOmar BarrosAinda não há avaliações
- Informações de Instalação - Motores Marítimos: Programa 96Documento39 páginasInformações de Instalação - Motores Marítimos: Programa 96Valdeir AlmeidaAinda não há avaliações
- OBR AmortecedoresDocumento36 páginasOBR AmortecedoresMarcos Roberto Cardoso100% (1)
- Unidade IV - Concordância de Curvas Horizontais (1a Parte)Documento32 páginasUnidade IV - Concordância de Curvas Horizontais (1a Parte)Rafael AmaralAinda não há avaliações
- Tema - Sistema de Travagem 12, 13, 14Documento11 páginasTema - Sistema de Travagem 12, 13, 14Daniel JacintoAinda não há avaliações
- ABNT CB-48 - Comitê Brasileiro de Máquinas RodoviáriasDocumento25 páginasABNT CB-48 - Comitê Brasileiro de Máquinas RodoviáriasdiegodoriguelloAinda não há avaliações
- Guias Lineares OBRDocumento24 páginasGuias Lineares OBRPaulo HenriqueAinda não há avaliações
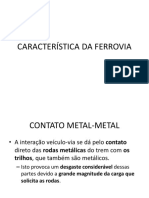
- Aula 2 Característica Da FerroviaDocumento48 páginasAula 2 Característica Da FerroviaDayane Cristina Alves Ferreira100% (1)
- Apresentação Linha Pa-Carreg WaDocumento35 páginasApresentação Linha Pa-Carreg Wajoao maria100% (1)
- Delivery 02 Julho 2023Documento374 páginasDelivery 02 Julho 2023paulohmartins318Ainda não há avaliações
- OBR Dualvee PDFDocumento8 páginasOBR Dualvee PDFtonnytoonsAinda não há avaliações
- RiggerDocumento115 páginasRiggerdanielcutrim201071% (7)
- Ebook Carlini 2018Documento15 páginasEbook Carlini 2018Eder Rodrigues100% (4)
- Motor Shunt AtualizadoDocumento13 páginasMotor Shunt AtualizadoMilton ManjateAinda não há avaliações
- Analise FalhasDocumento23 páginasAnalise FalhasPedro Tiago Batista CoelhoAinda não há avaliações
- AT102-Aula08 Embreagem PDFDocumento33 páginasAT102-Aula08 Embreagem PDFEtivaldoRodriguesCgAinda não há avaliações
- Actros 2553 LS 6x2Documento2 páginasActros 2553 LS 6x2Ricardo Bruxel ZimmermannAinda não há avaliações
- Eixo Traseiro 2Documento37 páginasEixo Traseiro 2Pedro Yuri100% (2)
- Desenvolvimento e Dimensionamento Do Projeto Do Subsistema de Direção de Veículo Fora-De-Estrada PDFDocumento11 páginasDesenvolvimento e Dimensionamento Do Projeto Do Subsistema de Direção de Veículo Fora-De-Estrada PDFmikael bezerra cotias dos santosAinda não há avaliações
- Aula 07 - Rodas e Trilhos. Tecnologia em Logística Sistemas de Elevação e Transporte PDFDocumento17 páginasAula 07 - Rodas e Trilhos. Tecnologia em Logística Sistemas de Elevação e Transporte PDFJean RosaAinda não há avaliações
- Relatório Ponte Rolante 2021 RA-59314 MARCELO FAITADocumento85 páginasRelatório Ponte Rolante 2021 RA-59314 MARCELO FAITAMarcelo Renato Faita Filho100% (1)
- 01 Freios e EmbreagensDocumento13 páginas01 Freios e EmbreagensGustavo GiattiAinda não há avaliações
- Carro de Transporte de CargaDocumento2 páginasCarro de Transporte de CargaJosé Luiz FevereiroAinda não há avaliações
- Artigo CONEM 2022 v2 SERGIO LUIS RABELO DE ALMEIDADocumento8 páginasArtigo CONEM 2022 v2 SERGIO LUIS RABELO DE ALMEIDAslrabeloAinda não há avaliações
- Ponte RolanteDocumento4 páginasPonte RolantePaulo BrunoAinda não há avaliações
- Programa (20230320)Documento3 páginasPrograma (20230320)rodolfoAinda não há avaliações
- 1Documento1 página1rodolfoAinda não há avaliações
- 1Documento1 página1rodolfoAinda não há avaliações
- 1Documento1 página1rodolfoAinda não há avaliações
- Current Status and Prospects of Three-DimensionalDocumento11 páginasCurrent Status and Prospects of Three-DimensionalrodolfoAinda não há avaliações
- AP-04 Multímetro PDFDocumento7 páginasAP-04 Multímetro PDFgodoi2011Ainda não há avaliações
- Guia Branding Vale 2010Documento70 páginasGuia Branding Vale 2010Paulo CostaAinda não há avaliações
- Orçamento PrologDocumento15 páginasOrçamento Prologrodolfo rodriges'Ainda não há avaliações
- Invenção Da Superquadra PDFDocumento37 páginasInvenção Da Superquadra PDFbalauarquitetura100% (1)
- Modelo Resumo Semana AcademicaDocumento2 páginasModelo Resumo Semana AcademicaAdnelsonRibeiroBatistaAinda não há avaliações
- Manual de Instalação Básico - BWS E3+Documento2 páginasManual de Instalação Básico - BWS E3+Andre VendasAinda não há avaliações
- Manual Valvulas PentairDocumento2 páginasManual Valvulas PentairRaquel NockelliAinda não há avaliações
- Vidro Plano para Edificações SumDocumento3 páginasVidro Plano para Edificações SumFabio Marcondes MachadoAinda não há avaliações
- Detalhe Da UFCD: 7900 - Atelier de Projeto de Cerâmica Criativa - Produção ArtesanalDocumento1 páginaDetalhe Da UFCD: 7900 - Atelier de Projeto de Cerâmica Criativa - Produção ArtesanalJoão Tao PortugalAinda não há avaliações
- Artigo - Sonia Vieira PDFDocumento4 páginasArtigo - Sonia Vieira PDFGlaucia Amorim FariaAinda não há avaliações
- Fiat 1.6L - 16VDocumento4 páginasFiat 1.6L - 16VLeandro FerreiraAinda não há avaliações
- Lista 1 - Instalações IndustriaisDocumento3 páginasLista 1 - Instalações IndustriaisPedro AugustoAinda não há avaliações
- Apostila GuiadoCTFV Modulo 3 PDFDocumento150 páginasApostila GuiadoCTFV Modulo 3 PDFAlessandro Carneiro de AraujoAinda não há avaliações
- PCCDUDocumento12 páginasPCCDUAnitaFerreiraAinda não há avaliações
- NBR 11805 - 91 (EB-2104) - Materiais para Sub-Base Ou Base de Solo-Brita - 2pagDocumento2 páginasNBR 11805 - 91 (EB-2104) - Materiais para Sub-Base Ou Base de Solo-Brita - 2pagClaudio LorenzoniAinda não há avaliações
- Fisica DilataçãoDocumento1 páginaFisica DilataçãocarlarenataxAinda não há avaliações
- Remessa Docs Compart ADSE Mod 1 GTID97Documento2 páginasRemessa Docs Compart ADSE Mod 1 GTID97Miguel Santos50% (2)
- Eletronica de Potencia Udesc 5 4 Inversor Trif Sico AttDocumento20 páginasEletronica de Potencia Udesc 5 4 Inversor Trif Sico AttCezardeBarrosAinda não há avaliações
- Documentos - SARDocumento45 páginasDocumentos - SARRenato MonteiroAinda não há avaliações
- Manual de AviaçãoDocumento144 páginasManual de AviaçãovilmaraAinda não há avaliações
- Procedimento para Estruturas em 69kV PDFDocumento144 páginasProcedimento para Estruturas em 69kV PDFalexandre100% (1)
- Teste 1Documento6 páginasTeste 1Marisa Montes0% (2)
- Fatura TIM Roberto CarlosDocumento2 páginasFatura TIM Roberto CarlosEasy Payweb Br InternetAinda não há avaliações
- Memorial Descritivo Das MedidasDocumento22 páginasMemorial Descritivo Das MedidasJulio Pansera Jr100% (1)
- Apresentação Sobre PaisagensDocumento10 páginasApresentação Sobre PaisagensGonçaloAinda não há avaliações
- Catálogo BGFADocumento11 páginasCatálogo BGFAMyrian Martins MendesAinda não há avaliações
- Detetive Júnior 3 - O Livro SuperlegalDocumento8 páginasDetetive Júnior 3 - O Livro SuperlegalHPO SFCS AdvogadosAinda não há avaliações
- Levantamento de Materiais - Lajes Pré - MoldadasDocumento1 páginaLevantamento de Materiais - Lajes Pré - MoldadasMárcio Ferreira do NascimentoAinda não há avaliações
- 6º Ano Operacoes - Com - Numeros - Naturais PDFDocumento11 páginas6º Ano Operacoes - Com - Numeros - Naturais PDFRafael OliveiraAinda não há avaliações
- Guia Pratico P Entender As Barras de AccessDocumento9 páginasGuia Pratico P Entender As Barras de AccessraqueloasisAinda não há avaliações