Você também pode gostar
- 6 Apostila Automacao IndustrialDocumento65 páginas6 Apostila Automacao IndustrialMatheus Lima100% (1)
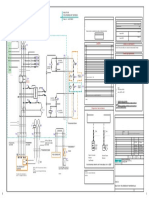
- QDF - Multix B - Polydoros 30-55kw Rev.a23Documento1 páginaQDF - Multix B - Polydoros 30-55kw Rev.a23jorgeAinda não há avaliações
- OsciladoresDocumento36 páginasOsciladoresRafael Baptista Brandão0% (1)
- Honda Basico de MotoDocumento162 páginasHonda Basico de MotoCarlos Cordido100% (2)
- Teoria de OsciladoresDocumento22 páginasTeoria de OsciladoresDaniel Dias100% (1)
- Módulo 02 - Chave Fusível IndicadoraDocumento22 páginasMódulo 02 - Chave Fusível IndicadoraWendell JuniorAinda não há avaliações
- OSCILADORESDocumento48 páginasOSCILADORESjoaoteixeira25100% (1)
- Apostila de Física - ImpactoDocumento38 páginasApostila de Física - ImpactoRaisa Sant'anna50% (2)
- Capítulo 11 - Oscilador Armstrong.Documento11 páginasCapítulo 11 - Oscilador Armstrong.Adriano Santos100% (1)
- Apresentação Sao Judas - Spda AtualizadaDocumento33 páginasApresentação Sao Judas - Spda AtualizadatheresaAinda não há avaliações
- Circuitos OsciladoresDocumento6 páginasCircuitos OsciladoresRafael FuhrmannAinda não há avaliações
- Eletrônica Analógica 2 - Seção 2.2Documento18 páginasEletrônica Analógica 2 - Seção 2.2Guilherme AlexandreAinda não há avaliações
- Capítulo 13 - Osciladores Com Controle Automático de Ganho.Documento16 páginasCapítulo 13 - Osciladores Com Controle Automático de Ganho.Adriano SantosAinda não há avaliações
- WEG Alternador Sincrono Linha G Plus 50013799 Catalogo Portugues BRDocumento36 páginasWEG Alternador Sincrono Linha G Plus 50013799 Catalogo Portugues BRriquemaAinda não há avaliações
- Aplicações Práticas Com LM741Documento8 páginasAplicações Práticas Com LM741Leonardo VerçozaAinda não há avaliações
- Osciladores Capitulo 10 PDFDocumento11 páginasOsciladores Capitulo 10 PDFErickson Fabian CastilloAinda não há avaliações
- Osciladores Capitulo - 6Documento12 páginasOsciladores Capitulo - 6Matheus PadilhaAinda não há avaliações
- Osciladores para RFDocumento62 páginasOsciladores para RFEmanuel Baldissera100% (1)
- Capitulo - 1-Teoria Geral de OsciladoresDocumento11 páginasCapitulo - 1-Teoria Geral de OsciladoresGeraldo JuniorAinda não há avaliações
- ARU-Geradores de SinalDocumento18 páginasARU-Geradores de SinalNelson Ananias ChauAinda não há avaliações
- Osciladores Capitulo - 7Documento12 páginasOsciladores Capitulo - 7Matheus PadilhaAinda não há avaliações
- Amplificador Operacional Integrador e DiferenciadorDocumento7 páginasAmplificador Operacional Integrador e DiferenciadorJoão Henrique CoelhoAinda não há avaliações
- Anexo I PDFDocumento14 páginasAnexo I PDFMilton AlvesAinda não há avaliações
- O Oscilador de Bloqueio Com Transístor Na Configuração de Emissor Comum o Colector Do Transístor é Ligado Ao Enrolamento Primário de Um Transformador Cujo Secundário Corresponde Ao Circuito de Realimentação e Está Ligado ADocumento3 páginasO Oscilador de Bloqueio Com Transístor Na Configuração de Emissor Comum o Colector Do Transístor é Ligado Ao Enrolamento Primário de Um Transformador Cujo Secundário Corresponde Ao Circuito de Realimentação e Está Ligado AIsaias Bartolomeu SambgaAinda não há avaliações
- Oscilador Pierce 4 MHZDocumento4 páginasOscilador Pierce 4 MHZLuimar Donini100% (1)
- Estratégias Ótimas para Projetos de Filtros Harmõnicos Utilizando Algoritmos GenéticosDocumento6 páginasEstratégias Ótimas para Projetos de Filtros Harmõnicos Utilizando Algoritmos GenéticosRafael FeitosaAinda não há avaliações
- Como Funcionam Os Osciladores (ART379)Documento18 páginasComo Funcionam Os Osciladores (ART379)monteiroarteAinda não há avaliações
- ELECTRÓNICA Mod 11Documento9 páginasELECTRÓNICA Mod 11TugaraAinda não há avaliações
- Manoellds ArtDocumento11 páginasManoellds ArtWillian RibasAinda não há avaliações
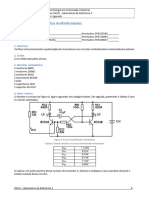
- Eletronica Experimento Guia 3 2015Documento10 páginasEletronica Experimento Guia 3 2015AndreAinda não há avaliações
- AULA PROTEÇÃO CAPITULO 7.1 Rev01Documento65 páginasAULA PROTEÇÃO CAPITULO 7.1 Rev01mauricio_rodrigues09Ainda não há avaliações
- Osciladores SenoidaisDocumento31 páginasOsciladores SenoidaisjlguedesAinda não há avaliações
- Multivibrador 555 PDFDocumento10 páginasMultivibrador 555 PDFVictor CamposAinda não há avaliações
- Relatório OsciladoresDocumento13 páginasRelatório OsciladoresRafael CarvalhoAinda não há avaliações
- Sistema de Retificação TiristorizadoDocumento3 páginasSistema de Retificação TiristorizadoCicero MelloAinda não há avaliações
- Relatorio 3 Eletronica UfcgDocumento9 páginasRelatorio 3 Eletronica UfcgDarlanny DinizAinda não há avaliações
- RespostasP2 SEPDocumento3 páginasRespostasP2 SEPValber SoaresAinda não há avaliações
- Experimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRADocumento12 páginasExperimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRAMatheus LeorAinda não há avaliações
- 8 CRF PDFDocumento29 páginas8 CRF PDFAldmiro MuquixeAinda não há avaliações
- Exp IIIDocumento8 páginasExp IIIAndreAinda não há avaliações
- Eletrônica - OsciladoresDocumento4 páginasEletrônica - OsciladoresAntonio OtavianoAinda não há avaliações
- Relatório Circuito RLC (2 Ordem)Documento14 páginasRelatório Circuito RLC (2 Ordem)oficinadobrancotrAinda não há avaliações
- Retificação Com TiristoresDocumento28 páginasRetificação Com TiristoresStudents EletricAinda não há avaliações
- APRESENTAO ROTEIRO GTD-01 - Componentes de Um Sist. de EeDocumento42 páginasAPRESENTAO ROTEIRO GTD-01 - Componentes de Um Sist. de EeArthur GouveiaAinda não há avaliações
- Circuitos Elétricos II (Portugués) (Presentación) Autor Profa. Mariane R. PetragliaDocumento199 páginasCircuitos Elétricos II (Portugués) (Presentación) Autor Profa. Mariane R. Petraglianvnvsk8Ainda não há avaliações
- Exp03 AULA 04 - Circuitos Multivibradores 18-08-2023 ANDRE ALEX MATHEUSDocumento6 páginasExp03 AULA 04 - Circuitos Multivibradores 18-08-2023 ANDRE ALEX MATHEUSALEX PESSOA PIMENTELAinda não há avaliações
- Aula Pratica RLCDocumento5 páginasAula Pratica RLCluiz pauloAinda não há avaliações
- Análise de Circuítos Elétricos Unidade10 PDFDocumento60 páginasAnálise de Circuítos Elétricos Unidade10 PDFVejulipaAinda não há avaliações
- Tópico 2 EletrônicaDocumento10 páginasTópico 2 EletrônicaGabriel Sanches BarrosoAinda não há avaliações
- Conversores CC - Curso BásicoDocumento10 páginasConversores CC - Curso BásicoMatthew WarrenAinda não há avaliações
- Oscilador Por Deslocamento de Fase 1Documento6 páginasOscilador Por Deslocamento de Fase 1Daniel MonteiroAinda não há avaliações
- Realimentacao e Circuitos OsciladoresDocumento17 páginasRealimentacao e Circuitos OsciladoresrtnakashimaAinda não há avaliações
- Relatório Final - Prática 1Documento6 páginasRelatório Final - Prática 1Guilherme CabralAinda não há avaliações
- Circuito RLCDocumento28 páginasCircuito RLCevelynelf100% (3)
- Relatório 03Documento13 páginasRelatório 03JVPRAinda não há avaliações
- Relatório 9 - Instrumentação - TCMDocumento10 páginasRelatório 9 - Instrumentação - TCMoficinadobrancotrAinda não há avaliações
- Cicloconversores 23Documento10 páginasCicloconversores 23MaurrizzyWestonLanclacheJotamo0% (1)
- Exercício Laboratório Módulo 4 - Oscilador LC ColpittsDocumento2 páginasExercício Laboratório Módulo 4 - Oscilador LC ColpittsFrancarll OliveiraAinda não há avaliações
- Roteiro de Laboratório de Circuito RLC SubamortecidoDocumento10 páginasRoteiro de Laboratório de Circuito RLC SubamortecidoJoão MarquesAinda não há avaliações
- Minipa M 1110ADocumento17 páginasMinipa M 1110ATatianaMacedoAinda não há avaliações
- Experimento #5: IntroduçãoDocumento12 páginasExperimento #5: IntroduçãoFiegiAinda não há avaliações
- Exp IVDocumento14 páginasExp IVAndreAinda não há avaliações
- O Pré AmplificadorDocumento4 páginasO Pré AmplificadorNobertoMonteiroNP100% (1)
- Apostila - Numero - Complexo AcDocumento17 páginasApostila - Numero - Complexo AcTharcilo AlmeidaAinda não há avaliações
- Planilha de Cálculo de Dimencionamento Da Instalação Elétrica de Uma FábricaDocumento17 páginasPlanilha de Cálculo de Dimencionamento Da Instalação Elétrica de Uma FábricaNathália CadeteAinda não há avaliações
- SEL5765 Aula07 ProtecaoGDDocumento51 páginasSEL5765 Aula07 ProtecaoGDAdilson Leite ProençaAinda não há avaliações
- Resumo Modelagem de Conversores PDFDocumento33 páginasResumo Modelagem de Conversores PDFeldercleiton2011Ainda não há avaliações
- Miniteste 3 (AL 2.1 e AL 2.2)Documento4 páginasMiniteste 3 (AL 2.1 e AL 2.2)carlos oliveiraAinda não há avaliações
- Transformador de CorrienteDocumento10 páginasTransformador de CorrienteluisAinda não há avaliações
- Conector Elétrico Rotativo Folder - MercotacDocumento6 páginasConector Elétrico Rotativo Folder - MercotacclaudioandrevalverdeAinda não há avaliações
- Relatório: Acionamentos Elétricos de MotoresDocumento22 páginasRelatório: Acionamentos Elétricos de MotoresCarla Ferreira100% (3)
- Aes 2016 Tube AmpDocumento81 páginasAes 2016 Tube AmpRobson SilvaAinda não há avaliações
- Lista HomologadosDocumento6 páginasLista Homologadosthiagoeng91Ainda não há avaliações
- Relatorio 5Documento6 páginasRelatorio 5ThiagoAinda não há avaliações
- Inventos e Invenções EletrônicasDocumento11 páginasInventos e Invenções Eletrônicasnatysmbio1173Ainda não há avaliações
- Passo A Passo Dimensionamento de CircuitosDocumento2 páginasPasso A Passo Dimensionamento de CircuitossilviovribasAinda não há avaliações
- Catalogo WEG Acionadores - RW17DDocumento2 páginasCatalogo WEG Acionadores - RW17DEdu ArdoAinda não há avaliações
- TC L32u5bDocumento30 páginasTC L32u5bLuiz Previato50% (2)
- Apostila 1-Questões de TransformadoresDocumento9 páginasApostila 1-Questões de TransformadoresAlan CoelhoAinda não há avaliações
- Relé Estado Solido - ContempDocumento1 páginaRelé Estado Solido - ContemparlindomatosAinda não há avaliações
- Aula 2Documento84 páginasAula 2d2020016861Ainda não há avaliações
- 4 - TIG 200P DIGITAL (Atualização 1)Documento13 páginas4 - TIG 200P DIGITAL (Atualização 1)INTERPLASMA CORTE E SOLDAAinda não há avaliações
- 104 Fio Rigido Antichamas 10mm SilDocumento1 página104 Fio Rigido Antichamas 10mm SilJoao PauloAinda não há avaliações
- Prática GA Buck e BoostDocumento5 páginasPrática GA Buck e BoostFelipe SteinAinda não há avaliações
- Fatura CelescDocumento1 páginaFatura CelescCris Leani LimaAinda não há avaliações