Você também pode gostar
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- BDQ - Controle e Servo. II - Simul. 02Documento3 páginasBDQ - Controle e Servo. II - Simul. 02Paulo LinsAinda não há avaliações
- Adobe Scan 24 Mar. 2023Documento5 páginasAdobe Scan 24 Mar. 2023Diego Jacinto TovarAinda não há avaliações
- Docente Regente: Eng.° Suzauddin MendesDocumento5 páginasDocente Regente: Eng.° Suzauddin MendesNota Joao TemboAinda não há avaliações
- Apostila - Método Das ForçasDocumento145 páginasApostila - Método Das ForçasHadassa GuiaAinda não há avaliações
- 08 Css SolDocumento11 páginas08 Css SoleriquerombaoAinda não há avaliações
- Teste 1 - 2019Documento4 páginasTeste 1 - 2019Nicolae BobonAinda não há avaliações
- Lista03-Hiperestatica-Metodo Dos DeslocamentosDocumento7 páginasLista03-Hiperestatica-Metodo Dos DeslocamentosDeyvid MeloAinda não há avaliações
- Linha Elástica - Determinação e Exercícios ResolvidosDocumento27 páginasLinha Elástica - Determinação e Exercícios ResolvidosPedro Carlos Sztajn Lotfi50% (2)
- ASCIIDocumento12 páginasASCIIEdnercio LuisAinda não há avaliações
- Exercicio 06 - GabaritoDocumento6 páginasExercicio 06 - GabaritoquimiwataAinda não há avaliações
- Prática 1 Modulo Didatico Digital Portas Logicas UniversaisDocumento10 páginasPrática 1 Modulo Didatico Digital Portas Logicas UniversaisNazareno RibeiroAinda não há avaliações
- Lista03-Hiperestatica-Metodo Dos Deslocamentos PDFDocumento21 páginasLista03-Hiperestatica-Metodo Dos Deslocamentos PDFFabinho Juntá Ká Afer TuxáAinda não há avaliações
- Tabela ASCII ExtendidaDocumento14 páginasTabela ASCII ExtendidaMoisesAinda não há avaliações
- Atividade Pratica 3 Eletronica DigitalDocumento7 páginasAtividade Pratica 3 Eletronica DigitalDaniel RamosAinda não há avaliações
- Avaliação Final DigitalDocumento4 páginasAvaliação Final DigitalJonas Paixão marques de sousa100% (1)
- ListassasDocumento20 páginasListassasGabriel RamosAinda não há avaliações
- 1 - PME 5016 2a ListaDocumento2 páginas1 - PME 5016 2a ListaRobinson Imaiti MashibaAinda não há avaliações
- Alocador de Polos - Espaço de EstadosDocumento32 páginasAlocador de Polos - Espaço de EstadosLucasMoreiradeLacerdaAinda não há avaliações
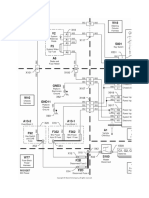
- Manuais - N101567-UN - Diagrama Da Alimentação Da BIC - Service ADVISOR™Documento4 páginasManuais - N101567-UN - Diagrama Da Alimentação Da BIC - Service ADVISOR™willyanAinda não há avaliações
- AI Ex0110Documento2 páginasAI Ex0110José PedroAinda não há avaliações
- Componentes SimétricasDocumento9 páginasComponentes SimétricasdenilsonAinda não há avaliações
- Componentes SimétricasDocumento9 páginasComponentes SimétricasdenilsonAinda não há avaliações
- Gabarito Provisório Da 1a Prova 20162Documento5 páginasGabarito Provisório Da 1a Prova 20162Luciana BoroniAinda não há avaliações
- Relatório 04 - EletrônicaDocumento16 páginasRelatório 04 - Eletrônicaedvandofilho2Ainda não há avaliações
- Automacao PDFDocumento107 páginasAutomacao PDFirving100% (1)
- Aula 5 Espaço de EstadosDocumento6 páginasAula 5 Espaço de EstadosJackeline Meireles HipolitoAinda não há avaliações
- Av1-Modelagem e Análise de Sistemas DinâmicosDocumento7 páginasAv1-Modelagem e Análise de Sistemas DinâmicosAdemir José Da SilvaAinda não há avaliações
- Cap9 ControlabilidadeDocumento31 páginasCap9 ControlabilidadeVitor NazárioAinda não há avaliações
- Atividade de EletrônicaDocumento2 páginasAtividade de Eletrônica20191irebioint0017Ainda não há avaliações
- Avaliação Final Digital (1) - CopiarDocumento5 páginasAvaliação Final Digital (1) - CopiarleandrodasilveiraoliveiraAinda não há avaliações
- Usca Ver3 e GMG St2000Documento1 páginaUsca Ver3 e GMG St2000BJNE01100% (1)
- Controlador Motor de Passo - Prática 09 - Eletrônica DigitalDocumento11 páginasControlador Motor de Passo - Prática 09 - Eletrônica DigitalGuilherme HenriqueAinda não há avaliações
- Unifap - Sepii - Lista de Exercícios - Cap 5-6-1Documento16 páginasUnifap - Sepii - Lista de Exercícios - Cap 5-6-1Marlucio TrajanoAinda não há avaliações
- CESAR School - Exercício Alarme CarroDocumento3 páginasCESAR School - Exercício Alarme CarroRafael YrcnalAinda não há avaliações
- Relatório de EDDocumento12 páginasRelatório de EDNathalia DrusillaAinda não há avaliações
- Correccao Do Teste V2Documento4 páginasCorreccao Do Teste V2rodrigues.profissional55Ainda não há avaliações
- Exercicios de Ciencias Dos Materiais 2Documento11 páginasExercicios de Ciencias Dos Materiais 2eliertonAinda não há avaliações
- Silo - Tips Praticas de Laboratorio de Eletronica DigitalDocumento8 páginasSilo - Tips Praticas de Laboratorio de Eletronica DigitalSaymmon GomesAinda não há avaliações
- Atividades de Fixação - Método Iterativo de Jacobi PDFDocumento7 páginasAtividades de Fixação - Método Iterativo de Jacobi PDFRenan Rosa MatosAinda não há avaliações
- Avaliacao Parcial 02 - 2014.2 Ciencia Dos Materiais UfbaDocumento5 páginasAvaliacao Parcial 02 - 2014.2 Ciencia Dos Materiais UfbaDário Junior100% (1)
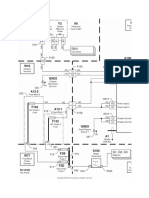
- Manuais - N119182-UN - Alimentação Da Unidade de Controle HIC - Service ADVISOR™Documento4 páginasManuais - N119182-UN - Alimentação Da Unidade de Controle HIC - Service ADVISOR™willyanAinda não há avaliações
- Aula 2 Determinantes Sistemas 2021 1Documento25 páginasAula 2 Determinantes Sistemas 2021 1LuísAinda não há avaliações
- Série Prova P4 EAI 21 2019Documento3 páginasSérie Prova P4 EAI 21 2019t01g04Ainda não há avaliações
- Fenomenos Transitorios Problemas Resolvidos18Dez08Documento22 páginasFenomenos Transitorios Problemas Resolvidos18Dez08Nadiusca BarretoAinda não há avaliações
- Exercicios Sobre Sistemas LinearesDocumento4 páginasExercicios Sobre Sistemas LinearesSon100% (1)
- pc2 01jul2015gabDocumento7 páginaspc2 01jul2015gabLUIZ BONFA DOS SANTOSAinda não há avaliações
- Lista de Exercícios Sobre Determinantes e Matrizes InversasDocumento2 páginasLista de Exercícios Sobre Determinantes e Matrizes InversasRodrigues RaiteAinda não há avaliações
- Exerccios Resolvidos - QuadripolosDocumento5 páginasExerccios Resolvidos - QuadripolosTiago AlvesAinda não há avaliações
- Relatório Final 2017Documento17 páginasRelatório Final 2017eduardocavalcante.engAinda não há avaliações
- Monitorando Através Do Visual Basic O Gaussímetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual Basic O Gaussímetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Monitorando Através Do Visual C# O Gaussímetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O Gaussímetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Usando Uma Impressora Térmica Para Registrar Um Gaussímetro Programado No ArduinoNo EverandUsando Uma Impressora Térmica Para Registrar Um Gaussímetro Programado No ArduinoAinda não há avaliações
- Projetos Com Esp8266 Programado Em Arduino - Parte XiiNo EverandProjetos Com Esp8266 Programado Em Arduino - Parte XiiAinda não há avaliações
- TdR's TRABALHO SEMESTRAL - AEPDocumento3 páginasTdR's TRABALHO SEMESTRAL - AEPNunes Jose LeonardoAinda não há avaliações
- Projectos de InvestimentoDocumento173 páginasProjectos de InvestimentoNunes Jose LeonardoAinda não há avaliações
- Aula - Analise de Investimentos - P1Documento40 páginasAula - Analise de Investimentos - P1Nunes Jose LeonardoAinda não há avaliações
- Tema I - Aula 2 - Principios Economicos e ProjectosDocumento19 páginasTema I - Aula 2 - Principios Economicos e ProjectosNunes Jose LeonardoAinda não há avaliações
- Questionario - Analise de Investimentos 1Documento1 páginaQuestionario - Analise de Investimentos 1Nunes Jose LeonardoAinda não há avaliações
- Modelo de Mapa de Amortização 2021Documento1 páginaModelo de Mapa de Amortização 2021Nunes Jose LeonardoAinda não há avaliações
- Aula04 CSFDocumento21 páginasAula04 CSFNunes Jose LeonardoAinda não há avaliações
- Antenas PDFDocumento43 páginasAntenas PDFAbilio EduardoAinda não há avaliações
- Projecto de SRTVDocumento18 páginasProjecto de SRTVNunes Jose LeonardoAinda não há avaliações
- Exercicios I Enderecamento ExtraDocumento2 páginasExercicios I Enderecamento ExtraNunes Jose LeonardoAinda não há avaliações
- Aula - 1 - Introdução À Economia PDFDocumento31 páginasAula - 1 - Introdução À Economia PDFkeven hagyAinda não há avaliações
- Indicadores de ViabilidadeDocumento4 páginasIndicadores de ViabilidadeNunes Jose LeonardoAinda não há avaliações
- At 9 - Sistemas MultivariaveisDocumento35 páginasAt 9 - Sistemas MultivariaveisNunes Jose LeonardoAinda não há avaliações
- Ficha 10 - Gestão de Chamadas em GSMDocumento8 páginasFicha 10 - Gestão de Chamadas em GSMNunes Jose LeonardoAinda não há avaliações
- AP - Sistemas Multivariaveis.Documento7 páginasAP - Sistemas Multivariaveis.Nunes Jose LeonardoAinda não há avaliações
- AEP 2021 - Exercicio Diagnostico 1Documento1 páginaAEP 2021 - Exercicio Diagnostico 1Nunes Jose LeonardoAinda não há avaliações
- At 10 - Estabilidade, Controlabilidade, Observabilidade e Realimentacao de EstadosDocumento14 páginasAt 10 - Estabilidade, Controlabilidade, Observabilidade e Realimentacao de EstadosNunes Jose LeonardoAinda não há avaliações
- Ficha 1 - Introdução Às Comunicações Sem FioDocumento22 páginasFicha 1 - Introdução Às Comunicações Sem FioNunes Jose LeonardoAinda não há avaliações
- (AT13) - Exercícios de Polimorfismo - Programacao 4e5oanoDocumento2 páginas(AT13) - Exercícios de Polimorfismo - Programacao 4e5oanoNunes Jose LeonardoAinda não há avaliações
- Equilíbrio Ácido-Básico e AlimentaçãoDocumento3 páginasEquilíbrio Ácido-Básico e AlimentaçãoEdlenecslAinda não há avaliações
- Espaços Motores de Fluxos Mundiais (12.º)Documento10 páginasEspaços Motores de Fluxos Mundiais (12.º)profgeofernando100% (2)
- Descobrimento Do Brasil - Cola Da WebDocumento4 páginasDescobrimento Do Brasil - Cola Da WebWallace O RoqueAinda não há avaliações
- Aula-2-Termodinâmica-e-Equilibrio Experimental - Tensão SuperficialDocumento5 páginasAula-2-Termodinâmica-e-Equilibrio Experimental - Tensão SuperficialEstefani SousaAinda não há avaliações
- Atividade Cultura Brasileira 1 TEXTOSDocumento1 páginaAtividade Cultura Brasileira 1 TEXTOSRafael FrancoAinda não há avaliações
- MANUAL CR110A DoseBadge Short OperatingDocumento72 páginasMANUAL CR110A DoseBadge Short Operatingfandrade005Ainda não há avaliações
- Usp 111-402-1-PBDocumento11 páginasUsp 111-402-1-PBRamalho Santos de ColoAinda não há avaliações
- Ed. Física - 9º Ano - JunhoDocumento10 páginasEd. Física - 9º Ano - JunhoRheurysonn AlvesAinda não há avaliações
- A Inpiração e A Autoridade Das EscriturasDocumento2 páginasA Inpiração e A Autoridade Das Escriturasapi-3861555100% (1)
- Periodização e Planejamento No JudôDocumento33 páginasPeriodização e Planejamento No JudôAdfda Fdfdf86% (7)
- Wilo Sistemas de Bombagem 2009-03-30Documento252 páginasWilo Sistemas de Bombagem 2009-03-30CavamogoAinda não há avaliações
- PIEPER Josef - Que e FilosofarDocumento35 páginasPIEPER Josef - Que e FilosofarMarcmelo100% (3)
- Catecismo de Nossa Senhora PDFDocumento52 páginasCatecismo de Nossa Senhora PDFEvelyn Affonso100% (1)
- A Ideologia Do Socialismo JurídicoDocumento3 páginasA Ideologia Do Socialismo JurídicoLeonardo GuittonAinda não há avaliações
- Contos 2Documento19 páginasContos 2IturalAinda não há avaliações
- O Liberalismo É PecadoDocumento192 páginasO Liberalismo É PecadoLuiza Colassanto ZamboliAinda não há avaliações
- A Corrente Humanista e A Corrente TranspessoalDocumento49 páginasA Corrente Humanista e A Corrente TranspessoalWanderlei GCAinda não há avaliações
- CoagulogramaDocumento27 páginasCoagulogramaJessica Teixeira100% (1)
- Acentuação GráficaDocumento3 páginasAcentuação GráficaAdrianaAinda não há avaliações
- Rito Da Dedicação de Uma IgrejaDocumento9 páginasRito Da Dedicação de Uma Igrejastorealcateia22Ainda não há avaliações
- CLR James - Os Jacobinos Negros-Boitempo (2010)Documento202 páginasCLR James - Os Jacobinos Negros-Boitempo (2010)tadeu100% (6)
- Apresentação - Mancais para RolamentosDocumento34 páginasApresentação - Mancais para RolamentosPricyla ChwistAinda não há avaliações
- A Lei de PembaDocumento6 páginasA Lei de PembaSergio Nabais100% (1)
- Tds Ficha - Tecnica Preg - Facil Rev.06 17docDocumento2 páginasTds Ficha - Tecnica Preg - Facil Rev.06 17docMarcosAinda não há avaliações
- Aula 1 - Fundações 13-08-2020Documento5 páginasAula 1 - Fundações 13-08-2020José NunesAinda não há avaliações
- Magias de ClérigoDocumento29 páginasMagias de ClérigoLuiz Fernando FagundesAinda não há avaliações
- Manutenção Eletrica Geral 17.07.2022Documento30 páginasManutenção Eletrica Geral 17.07.2022Nayara NascimentoAinda não há avaliações
- Alkylux - ICMS 18Documento3 páginasAlkylux - ICMS 18Kenidi BiazottoAinda não há avaliações
- Catalago Guaporé Proteção 2019 1.0 PDFDocumento12 páginasCatalago Guaporé Proteção 2019 1.0 PDFmaylon campystAinda não há avaliações
- Ricardo Barbosa PDDocumento84 páginasRicardo Barbosa PDCleide FernandesAinda não há avaliações