Você também pode gostar
- UNAMA - Manual de Normalizacão de Trabalhos AcadêmicosDocumento54 páginasUNAMA - Manual de Normalizacão de Trabalhos AcadêmicosLeonardo Almeida100% (5)
- Tutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDDocumento9 páginasTutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDJuliana VianaAinda não há avaliações
- Apresentação Do Planejamento de TCC para o Curso de AgroindustriaDocumento16 páginasApresentação Do Planejamento de TCC para o Curso de AgroindustriaEdvaldo NicoliniAinda não há avaliações
- TCC GleydsonDocumento32 páginasTCC GleydsonGleyci AlmeidaAinda não há avaliações
- Automação de Processos Industriais - Módulo 2Documento37 páginasAutomação de Processos Industriais - Módulo 2Assis JúniorAinda não há avaliações
- OtisDocumento63 páginasOtisAlison Silveira100% (4)
- Geologia Geral Viktor Leinz PDF DownloadDocumento4 páginasGeologia Geral Viktor Leinz PDF DownloadElton Evelyn Manhique Manhique100% (1)
- SDN PDFDocumento60 páginasSDN PDFErnon FilipeAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Robótica (AT1 2 3)Documento79 páginasRobótica (AT1 2 3)Tiago IzumisawaAinda não há avaliações
- 07 Pneumtica MaterialDidticoDocumento68 páginas07 Pneumtica MaterialDidticomarcelio dantasAinda não há avaliações
- Interpretando A Placa de Identificação Dos Motores de InduçãoDocumento50 páginasInterpretando A Placa de Identificação Dos Motores de InduçãoLeandro Terra de Freitas50% (2)
- MAPA Mental - TCCDocumento8 páginasMAPA Mental - TCCJhennifer SilvaAinda não há avaliações
- Simulador em Tempo Real para Motor Síncrono Com ÍmãDocumento10 páginasSimulador em Tempo Real para Motor Síncrono Com ÍmãIan SilveiraAinda não há avaliações
- Servo Biblioteca de Blocos para Simulink Arduino AlvoDocumento8 páginasServo Biblioteca de Blocos para Simulink Arduino AlvoVinicios FerrazAinda não há avaliações
- CLPBÁSICODocumento117 páginasCLPBÁSICOrogallasAinda não há avaliações
- Ebook Motores Eletricos v2Documento65 páginasEbook Motores Eletricos v2Daniel Oliveira100% (1)
- Implementação Matlab Simulink 2Documento53 páginasImplementação Matlab Simulink 2Francys Tadeu RibeiroAinda não há avaliações
- Sistemas Supervisórios: Controladores Lógicos Programáveis (CLP)Documento52 páginasSistemas Supervisórios: Controladores Lógicos Programáveis (CLP)Maria Aline GonçalvesAinda não há avaliações
- Gestão Da Manutenção Mecânica - LinkedInDocumento3 páginasGestão Da Manutenção Mecânica - LinkedInPedro MatheusAinda não há avaliações
- Controle e AutomaçãoDocumento4 páginasControle e AutomaçãoBruna AlcântaraAinda não há avaliações
- Automação Industrial3 - CLPDocumento31 páginasAutomação Industrial3 - CLPCleitoviskiAinda não há avaliações
- Regulação de Tensão Gerador SincronoDocumento61 páginasRegulação de Tensão Gerador SincronoLueden ClaresAinda não há avaliações
- Soluções - Resistência Dos Materiais - HIBBELER - 7 EdiçãoDocumento5 páginasSoluções - Resistência Dos Materiais - HIBBELER - 7 EdiçãoFlavia FonsecaAinda não há avaliações
- Automação IndustrialDocumento15 páginasAutomação IndustrialHerman KonzenAinda não há avaliações
- ANALISE DE VIBRAÇÃO - Aula 03 - Metodos de Diagnosticos de Maquinas - Parte 3Documento31 páginasANALISE DE VIBRAÇÃO - Aula 03 - Metodos de Diagnosticos de Maquinas - Parte 3Wanderson SantosAinda não há avaliações
- Aula+3+-+Automação+na+Indústria+4 0Documento38 páginasAula+3+-+Automação+na+Indústria+4 0Gileno MotaAinda não há avaliações
- Artigo Emulador PV Cba-2018 FinalDocumento9 páginasArtigo Emulador PV Cba-2018 FinalAdjeferson Custódio GomesAinda não há avaliações
- Sistema de Controle Industrial 6 PDFDocumento19 páginasSistema de Controle Industrial 6 PDFIgor FelipeAinda não há avaliações
- Documento 11Documento3 páginasDocumento 11João Henrique Ivo FreitasAinda não há avaliações
- Guia de Aplicação de ServoacionamentosDocumento126 páginasGuia de Aplicação de ServoacionamentosDanilo Ferreira de SouzaAinda não há avaliações
- Motores e Geradores - Prof. Aislan FrancisquiniDocumento39 páginasMotores e Geradores - Prof. Aislan FrancisquiniVictor SantanaAinda não há avaliações
- Tutorial - Arduino + SimulinkDocumento9 páginasTutorial - Arduino + SimulinkArthur Schuler da IgrejaAinda não há avaliações
- Teoria Controle 20182Documento164 páginasTeoria Controle 20182DaniloMaiaAinda não há avaliações
- Controle de Temperatura PID e PWMDocumento25 páginasControle de Temperatura PID e PWMGaspar Ramos50% (2)
- Introdução À Automação IndustrialDocumento14 páginasIntrodução À Automação IndustrialdudajwAinda não há avaliações
- Anexo 11 (PPT) Gestão Da Manutenção - TPMDocumento34 páginasAnexo 11 (PPT) Gestão Da Manutenção - TPMssidnalvasilvaAinda não há avaliações
- Fundamentos Da EletrotécnicaDocumento47 páginasFundamentos Da EletrotécnicaHenrique LaurentinoAinda não há avaliações
- Aula 08 - Pesquisa OperacionalDocumento26 páginasAula 08 - Pesquisa OperacionalGustavo BragaAinda não há avaliações
- 1 - Introdução A Pneumática e HidráulicaDocumento22 páginas1 - Introdução A Pneumática e HidráulicaWAGNER RODRIGUES DE ABREUAinda não há avaliações
- Sistemas CiberfísicosDocumento41 páginasSistemas CiberfísicosEmilly Melo100% (1)
- Cinematica - MCU e LançamentosDocumento6 páginasCinematica - MCU e LançamentosVanderlei NJAinda não há avaliações
- Apostila Eletronica Analogica CHMDocumento116 páginasApostila Eletronica Analogica CHMCarlos Henrique MonteiroAinda não há avaliações
- Fundamentos Maquinas CCDocumento83 páginasFundamentos Maquinas CCcaiosilvaaAinda não há avaliações
- Circuito Integrador TeoriaDocumento44 páginasCircuito Integrador TeoriaLeonardoGanhitoAinda não há avaliações
- Aula 2 - Introdução À PneumáticaDocumento24 páginasAula 2 - Introdução À PneumáticaDi M. Bra100% (1)
- Dia 3 - Aula 5 - Maquinas EletricasDocumento24 páginasDia 3 - Aula 5 - Maquinas EletricasGuilherme Cruz DestroAinda não há avaliações
- Eficiencia Energetica LIVRODocumento315 páginasEficiencia Energetica LIVROThiago SantosAinda não há avaliações
- Automação de Sistemas Hidráulicos e PneumáticosDocumento67 páginasAutomação de Sistemas Hidráulicos e PneumáticosGilmar TenórioAinda não há avaliações
- TRANSFORMADORES IdeaisDocumento41 páginasTRANSFORMADORES Ideaisapi-3735445100% (5)
- Aula 02 - Acionamentos EletroeletrônicosDocumento15 páginasAula 02 - Acionamentos EletroeletrônicosWAGNER RODRIGUES DE ABREUAinda não há avaliações
- Apostila Roteiros Lab Automação IndustrialDocumento80 páginasApostila Roteiros Lab Automação IndustrialJhonatan TavaresAinda não há avaliações
- Eletropneumática PDFDocumento1 páginaEletropneumática PDFPedro SousaAinda não há avaliações
- PROVA Eletronica PublicarDocumento20 páginasPROVA Eletronica PublicarOliveira JMAinda não há avaliações
- Eletrônica Potência - Simulação PWMDocumento5 páginasEletrônica Potência - Simulação PWMjpaiwaAinda não há avaliações
- 1 Introdução À AutomaçãoDocumento32 páginas1 Introdução À Automaçãor_ramiresAinda não há avaliações
- Laboratório de EletricidadeDocumento120 páginasLaboratório de EletricidadeODRANDEAinda não há avaliações
- Prova para Simulado Da Mecatrônica - EditadaDocumento40 páginasProva para Simulado Da Mecatrônica - EditadadanielfortalAinda não há avaliações
- Manual Do KeyprogramDocumento182 páginasManual Do Keyprogramfgodoy85Ainda não há avaliações
- Plano DaDisciplina - Instalações Elétricas IndustriaisDocumento6 páginasPlano DaDisciplina - Instalações Elétricas IndustriaisROBERLAM GONAÇLVES DE MENDONÇAAinda não há avaliações
- Fluxo de potência: Teoria e implementação de códigos computacionaisNo EverandFluxo de potência: Teoria e implementação de códigos computacionaisAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Configuração de Varios Inversor CFW 07-09-500-700 V1000 L1000Documento14 páginasConfiguração de Varios Inversor CFW 07-09-500-700 V1000 L1000carlosAinda não há avaliações
- Maquina TorinDocumento25 páginasMaquina TorincarlosAinda não há avaliações
- cfw10 SurDocumento2 páginascfw10 SurcarlosAinda não há avaliações
- Garaventa GSL Artira FalhasDocumento30 páginasGaraventa GSL Artira FalhascarlosAinda não há avaliações
- Operadr Selcom Supra - PDF.co - PTDocumento30 páginasOperadr Selcom Supra - PDF.co - PTcarlosAinda não há avaliações
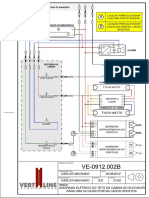
- Diagrama Elétrico Do Teto Da Cabina Com Uma Ou Duas PortasDocumento1 páginaDiagrama Elétrico Do Teto Da Cabina Com Uma Ou Duas PortascarlosAinda não há avaliações
- Direito Empresarial I PDFDocumento137 páginasDireito Empresarial I PDFcarlosAinda não há avaliações
- Direito ComercialDocumento177 páginasDireito ComercialPati CostaAinda não há avaliações
- Biblioteca - 529005 Historia Do Direito BrasileiroDocumento240 páginasBiblioteca - 529005 Historia Do Direito BrasileiroAlagarto1963100% (1)
- Liguagem Jurídica - Termos Técnos e Jargões001Documento1 páginaLiguagem Jurídica - Termos Técnos e Jargões001carlosAinda não há avaliações
- O Que É Um SGBDDocumento2 páginasO Que É Um SGBDGuilherme LimaAinda não há avaliações
- PartnerCast - Solutions Architect Associate - Ver2 - 2Documento103 páginasPartnerCast - Solutions Architect Associate - Ver2 - 2gabrielrcoutoAinda não há avaliações
- Projeto Integrado 2020 - 1 ADSDocumento8 páginasProjeto Integrado 2020 - 1 ADSTiago TeixeiraAinda não há avaliações
- Drenagem Urbana Manual de Projeto DAEE CETESB, 1980 PDFDocumento2 páginasDrenagem Urbana Manual de Projeto DAEE CETESB, 1980 PDFfazevedo_2009Ainda não há avaliações
- 4 - Ope - Siemens 828 DDocumento46 páginas4 - Ope - Siemens 828 DGuilherme MartendalAinda não há avaliações
- Manual Do Usuario - Modulo Veículos - Com Venda - Sec FazDocumento19 páginasManual Do Usuario - Modulo Veículos - Com Venda - Sec Fazelvio limaAinda não há avaliações
- Modelo de ComunicadoDocumento11 páginasModelo de ComunicadoJoão Kaima KaimaAinda não há avaliações
- Cuidados Com A Cabeça de Impressão Zebra 24-9-20Documento10 páginasCuidados Com A Cabeça de Impressão Zebra 24-9-20José Antonio VoyageAinda não há avaliações
- Márcio Henrique Pires Romão: Objetivo: Analista de Sistemas / Líder de Projetos - TIDocumento2 páginasMárcio Henrique Pires Romão: Objetivo: Analista de Sistemas / Líder de Projetos - TIDiego SabinoAinda não há avaliações
- Academia SAP Treinamento Sap e Curso Sap Abap Basis BW Fi PP MM SD Co CRM Funcional Academias Cursos e Treinamentos Ka SolutionDocumento2 páginasAcademia SAP Treinamento Sap e Curso Sap Abap Basis BW Fi PP MM SD Co CRM Funcional Academias Cursos e Treinamentos Ka SolutioneversonmachadoAinda não há avaliações
- Dicas PMDocumento180 páginasDicas PMLuan David J. BatistaAinda não há avaliações
- Manual Usuario LOGIXDocumento2 páginasManual Usuario LOGIXsadygoelzerAinda não há avaliações
- W'Ups++-+Engenharia+Reversa+na+Pra Tica+#2Documento78 páginasW'Ups++-+Engenharia+Reversa+na+Pra Tica+#2marcelo moreiraAinda não há avaliações
- Tutorial PptplexDocumento3 páginasTutorial PptplexPriscilla Ribeiro de SouzaAinda não há avaliações
- Avaliação 2 - Gestao de ProjetoDocumento8 páginasAvaliação 2 - Gestao de ProjetoIsaque Bizeque TomoAinda não há avaliações
- Notas de Versão - Memorial GDDocumento2 páginasNotas de Versão - Memorial GDElias BeirigoAinda não há avaliações
- 109722Documento12 páginas109722YnnedAinda não há avaliações
- INFORMÁTICA - SEGURANÇA DA INFORMAÇÃO - PROCEDIMENTOS de BACKUP e NUVEMDocumento6 páginasINFORMÁTICA - SEGURANÇA DA INFORMAÇÃO - PROCEDIMENTOS de BACKUP e NUVEMJunior EdmundoAinda não há avaliações
- Padrões GoF de CriaçãoDocumento52 páginasPadrões GoF de CriaçãoGildoAinda não há avaliações
- Apostila de SQL AvancadoDocumento50 páginasApostila de SQL AvancadoWiltemberg LimaAinda não há avaliações
- Modelo de Briefing - RecolocaçãoDocumento1 páginaModelo de Briefing - RecolocaçãoFernando PontesAinda não há avaliações
- Análise e Projetos de SistemaDocumento2 páginasAnálise e Projetos de SistemaEsdras RamosAinda não há avaliações
- ACCART, J. P. Serviço de ReferênciaDocumento159 páginasACCART, J. P. Serviço de ReferênciaDayane AquinoAinda não há avaliações
- Como Baixar A Foto de Perfil Do InstagramDocumento3 páginasComo Baixar A Foto de Perfil Do InstagramJéssicaDiogoPereiraAlvesdeFrançaAinda não há avaliações
- Configuração - Frameworksp - TDNDocumento3 páginasConfiguração - Frameworksp - TDNAdilio CostaAinda não há avaliações
- Questões AnatomiaDocumento9 páginasQuestões AnatomiaAllana MarinhoAinda não há avaliações
- Apostila Do Curso B Sico de Redes Com o Packet TracerDocumento34 páginasApostila Do Curso B Sico de Redes Com o Packet TracerMarcos RogérioAinda não há avaliações
- Mapa Informatica IndustrialDocumento4 páginasMapa Informatica IndustrialtrabsAinda não há avaliações