Você também pode gostar
- Econometria - Semana 3 - Estacionariedade em Modelos AR (P)Documento7 páginasEconometria - Semana 3 - Estacionariedade em Modelos AR (P)Jefferson PolettoAinda não há avaliações
- AutocorrelacaoDocumento20 páginasAutocorrelacaoFabrício Albani OliveiraAinda não há avaliações
- Modelagem de séries temporais estacionáriasDocumento67 páginasModelagem de séries temporais estacionáriasRodrigo BertelliAinda não há avaliações
- Cap 5Documento23 páginasCap 5Engenheirojamesblayne BlayneAinda não há avaliações
- Formulário Concreto Pilares - Momento de Segunda OrdemDocumento3 páginasFormulário Concreto Pilares - Momento de Segunda OrdemDaniel WilliamAinda não há avaliações
- Tema2 SEADocumento80 páginasTema2 SEAvicentepresencia91Ainda não há avaliações
- Fluxo de carga em sistemas elétricos de potência: exercícios de formulação básica e modelagemDocumento4 páginasFluxo de carga em sistemas elétricos de potência: exercícios de formulação básica e modelagemPeterParkerAinda não há avaliações
- Aula #2 - WeibullDocumento40 páginasAula #2 - WeibullEugenio Benito JuniorAinda não há avaliações
- Cinética Eletroquà Mica (Parte 2)Documento16 páginasCinética Eletroquà Mica (Parte 2)Dionéia BertolettiAinda não há avaliações
- Formulário 2Documento2 páginasFormulário 2andr7figueir-143034Ainda não há avaliações
- FormulárioDocumento2 páginasFormulárioandr7figueir-143034Ainda não há avaliações
- Compressao de Barras - ClassroomDocumento44 páginasCompressao de Barras - ClassroomJonatas JunioAinda não há avaliações
- IsolamentoDocumento4 páginasIsolamentodkd letraAinda não há avaliações
- Eletrônica de Potência - Retificadores A TiristorDocumento71 páginasEletrônica de Potência - Retificadores A Tiristorpedro.hr.cardozoAinda não há avaliações
- Séries Temporais EcometriaDocumento9 páginasSéries Temporais EcometriaLísias CastroAinda não há avaliações
- Lista 2 SoluçãoDocumento12 páginasLista 2 SoluçãoAllan César InácioAinda não há avaliações
- Teoria dos Circuitos AC em Regime PermanenteDocumento37 páginasTeoria dos Circuitos AC em Regime PermanenteManuel AugustoAinda não há avaliações
- 8.2 - MS3 - Instabilidade Do Equilbrio 1aDocumento33 páginas8.2 - MS3 - Instabilidade Do Equilbrio 1amatheusbarrosan7Ainda não há avaliações
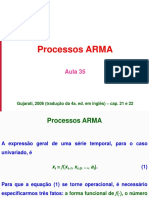
- Aula 35 - ST II - Modelos Arma - NovoDocumento86 páginasAula 35 - ST II - Modelos Arma - NovoDaniel SoaresAinda não há avaliações
- Circuito trifásico em Y com controle de faseDocumento21 páginasCircuito trifásico em Y com controle de faseLuiz HenriqueAinda não há avaliações
- Seletivas 12 GabaritoDocumento9 páginasSeletivas 12 Gabaritoleonardo sathlerAinda não há avaliações
- 05 AulaDocumento6 páginas05 AulaestoicaaescolaAinda não há avaliações
- PROJETO 1 - FENTRANS - IsabelleMendesDosSantosDocumento14 páginasPROJETO 1 - FENTRANS - IsabelleMendesDosSantosIsabelle Mendes Dos SantosAinda não há avaliações
- Aula1 Esta020-17Documento22 páginasAula1 Esta020-17gilliardAinda não há avaliações
- Elite Resolve Ime 2013 Quimica Discursivas PDFDocumento6 páginasElite Resolve Ime 2013 Quimica Discursivas PDFAndré MedeirosAinda não há avaliações
- RM - 2.1esforços AxiaisDocumento33 páginasRM - 2.1esforços AxiaisDavid DiasAinda não há avaliações
- Sêquências e Séries Infinitas de Termos ConstantesDocumento26 páginasSêquências e Séries Infinitas de Termos ConstantesCleversonAinda não há avaliações
- Exercícios Resolvidos 1 - Operação Binária PDFDocumento10 páginasExercícios Resolvidos 1 - Operação Binária PDFAlan FrancoAinda não há avaliações
- Prova3 2018.2Documento3 páginasProva3 2018.2Icaro MoraisAinda não há avaliações
- 1° Relatã Rio Fà - Sica Experimental III (Editado)Documento10 páginas1° Relatã Rio Fà - Sica Experimental III (Editado)Inaiara OliveiraAinda não há avaliações
- HVDC - Filtros HarmonicosDocumento92 páginasHVDC - Filtros HarmonicoscarlosrenatorcAinda não há avaliações
- TSS Aula 06 PDFDocumento22 páginasTSS Aula 06 PDFAristides AnselmoAinda não há avaliações
- Aula 3 - ANAL - sist.LINEARES - Transformada de Laplace - Análise de SistemasDocumento37 páginasAula 3 - ANAL - sist.LINEARES - Transformada de Laplace - Análise de SistemasMikael PaivaAinda não há avaliações
- Aula 05 - Estruturas de MadeiraDocumento12 páginasAula 05 - Estruturas de MadeiraRafael NascimentoAinda não há avaliações
- Solucoes Cap2Documento3 páginasSolucoes Cap2marianeAinda não há avaliações
- Viscoelasticidade e modelos viscoelásticosDocumento13 páginasViscoelasticidade e modelos viscoelásticosMiguel BentoAinda não há avaliações
- Estruturas Metálicas CompressãoDocumento31 páginasEstruturas Metálicas CompressãoBruna Fontes0% (1)
- AULA 6.3 - Sistemas de Segunda ordem-caract-MatlabPBDocumento38 páginasAULA 6.3 - Sistemas de Segunda ordem-caract-MatlabPBfranklin.projexAinda não há avaliações
- Análise de Escoamento Víscoso e Equações de Navier-StokesDocumento9 páginasAnálise de Escoamento Víscoso e Equações de Navier-StokesCamilo Andres Hoyos AlvarezAinda não há avaliações
- Econometria - Semana 1 - EstacionariedadeDocumento4 páginasEconometria - Semana 1 - EstacionariedadeJefferson PolettoAinda não há avaliações
- Estruturas de Aço e Madeira Area 2Documento29 páginasEstruturas de Aço e Madeira Area 2Henrique ArmicheAinda não há avaliações
- Exame 2020 1Documento6 páginasExame 2020 1João CelestinoAinda não há avaliações
- Teoria de Euler-BernoulliDocumento6 páginasTeoria de Euler-BernoulliBrendon MenezesAinda não há avaliações
- SolidificaçãoDocumento96 páginasSolidificaçãoAndré LopesAinda não há avaliações
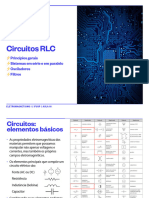
- Aula 16 - Circuitos RLCDocumento14 páginasAula 16 - Circuitos RLCCarlos EduardoAinda não há avaliações
- Estatística 1 - Roteiros 5 e 6Documento26 páginasEstatística 1 - Roteiros 5 e 6Tamires DamascenoAinda não há avaliações
- Ensaio de Tração Resistência Ductilidade: P1 - LaboratórioDocumento41 páginasEnsaio de Tração Resistência Ductilidade: P1 - LaboratórioMarcelo GalardoAinda não há avaliações
- 13-AtomoH-02Documento19 páginas13-AtomoH-02phhoohAinda não há avaliações
- Introdução à Raiz UnitáriaDocumento67 páginasIntrodução à Raiz UnitáriaVictor SoaresAinda não há avaliações
- Lista 3Documento1 páginaLista 3Alone InAinda não há avaliações
- 06 - Cálculos de Curto-CircuitoDocumento59 páginas06 - Cálculos de Curto-CircuitoJose Amilcar Lopez OsegueraAinda não há avaliações
- Prova1 2023-1 Ciência e Tecnologia de MateriaisDocumento8 páginasProva1 2023-1 Ciência e Tecnologia de MateriaisGabriela AlvesAinda não há avaliações
- Decomposição por Valores SingularesDocumento14 páginasDecomposição por Valores SingularesanstromptAinda não há avaliações
- Disrupção em Gases Sólidos e LíquidosDocumento7 páginasDisrupção em Gases Sólidos e LíquidosGervasio SimaoAinda não há avaliações
- Modelos Contínuos de Sistemas DinâmicosDocumento115 páginasModelos Contínuos de Sistemas DinâmicosMauricio AlvesAinda não há avaliações
- Física 3A Problemas ResolvidosDocumento90 páginasFísica 3A Problemas ResolvidosAntenista AlmeidaAinda não há avaliações
- Amplificadores Operacionais: Teoria e Resolução de ExercíciosDocumento20 páginasAmplificadores Operacionais: Teoria e Resolução de ExercíciosbentoAinda não há avaliações
- Introdução à Aerodinâmica Não EstacionáriaDocumento32 páginasIntrodução à Aerodinâmica Não EstacionáriaJulioCesardeSouzaAinda não há avaliações
- Txcresc Txcresc Desaltotal Txinvest Volat Txcexport Linf: T T 1 T T T T T TDocumento5 páginasTxcresc Txcresc Desaltotal Txinvest Volat Txcexport Linf: T T 1 T T T T T TCaio dossantosAinda não há avaliações
- Tópico 4 Greene Cap. 04 VirtualDocumento66 páginasTópico 4 Greene Cap. 04 VirtualCaio dossantosAinda não há avaliações
- Métodos Quantitativos Aplicados IDocumento5 páginasMétodos Quantitativos Aplicados ICaio dossantosAinda não há avaliações
- O Problema da Multicolinearidade na Regressão LinearDocumento9 páginasO Problema da Multicolinearidade na Regressão LinearCaio dossantosAinda não há avaliações
- Métodos Quantitativos Aplicados IDocumento5 páginasMétodos Quantitativos Aplicados ICaio dossantosAinda não há avaliações
- EditaDocumento9 páginasEditaCaio dossantosAinda não há avaliações
- REG EXERCÍCIOS AULA 23Documento6 páginasREG EXERCÍCIOS AULA 23Caio dossantosAinda não há avaliações
- Auto correlação serial dos errosDocumento12 páginasAuto correlação serial dos errosCaio dossantosAinda não há avaliações
- Publicacao DocumentoDocumento9 páginasPublicacao DocumentoCaio dossantosAinda não há avaliações
- Tabela 1Documento3 páginasTabela 1Caio dossantosAinda não há avaliações
- Aula 3 Macro Clássica 2022Documento91 páginasAula 3 Macro Clássica 2022Caio dossantosAinda não há avaliações
- Econometria Series TemporaisDocumento43 páginasEconometria Series TemporaisPatricia Ely ThomasAinda não há avaliações
- Avaliação do Ruído em Áreas HabitadasDocumento7 páginasAvaliação do Ruído em Áreas HabitadasAlexandre DreschAinda não há avaliações
- Modelo Macroeconômico Séries TempoDocumento74 páginasModelo Macroeconômico Séries TempoTSRosa100% (1)
- Suplemento de Processamento de SinaisDocumento80 páginasSuplemento de Processamento de SinaisRodrigo Cedrim0% (1)
- Tese Luiz AlbertoDocumento181 páginasTese Luiz AlbertoKhyashiAinda não há avaliações
- Capitulo 12 Gujarati Resumo Parte 2 PDFDocumento7 páginasCapitulo 12 Gujarati Resumo Parte 2 PDFAnonymous 6SbCKxAinda não há avaliações
- Aula 4 ECO455110821Documento26 páginasAula 4 ECO455110821Maria SantosAinda não há avaliações
- Circuito com diodo zener e transistorDocumento19 páginasCircuito com diodo zener e transistorRicardo AmorimAinda não há avaliações
- Gerador de ruído para sintetizador modularDocumento10 páginasGerador de ruído para sintetizador modularDmedAinda não há avaliações
- Modelagem Teórica de Cintilação IonosféricaDocumento27 páginasModelagem Teórica de Cintilação IonosféricaRodrigo FlorindoAinda não há avaliações
- TT195 - Processamento SinaisDocumento20 páginasTT195 - Processamento SinaisDaniel BouabsiAinda não há avaliações
- Rádio PX RP-90 ManualDocumento28 páginasRádio PX RP-90 ManualclaudiodelbiancoAinda não há avaliações
- Norma técnica estabelece níveis de ruído em áreas habitadasDocumento8 páginasNorma técnica estabelece níveis de ruído em áreas habitadassaviodebritoAinda não há avaliações
- Análise espectral e filtragem de séries temporaisDocumento72 páginasAnálise espectral e filtragem de séries temporaisAvelino MazuzeAinda não há avaliações
- Diagnostic Audiometer AD229e manual serviceDocumento65 páginasDiagnostic Audiometer AD229e manual serviceRamilson100% (1)
- Line Array - SeleniumDocumento6 páginasLine Array - SeleniumDavid GuimarãesAinda não há avaliações
- Sonitus ReverbDocumento3 páginasSonitus Reverbprettycool2Ainda não há avaliações
- Teorema Da Capacidade de InformaçãoDocumento15 páginasTeorema Da Capacidade de InformaçãoJosé NevesAinda não há avaliações
- Revisada em 2013 - Sinais aleatórios estacionários e noções sobre a teoria das probabilidadesDocumento75 páginasRevisada em 2013 - Sinais aleatórios estacionários e noções sobre a teoria das probabilidadesRAFAEL CASSIOAinda não há avaliações
- Manual Aquario RP80 V6 BRDocumento28 páginasManual Aquario RP80 V6 BRMarcos MillerAinda não há avaliações
- Manual AT-6666 rádioDocumento24 páginasManual AT-6666 rádioHenderson Freire71% (7)
- Tutorial Airview2 GRBDocumento6 páginasTutorial Airview2 GRBedubackAinda não há avaliações
- 1o Relatorio de Redes NeuronaisDocumento23 páginas1o Relatorio de Redes NeuronaisGustavo RotoAinda não há avaliações
- Séries temporais estocásticas: processos autorregressivos e estacionaridadeDocumento3 páginasSéries temporais estocásticas: processos autorregressivos e estacionaridadeLarissa SouzaAinda não há avaliações
- Econometria de Séries TemporaisDocumento90 páginasEconometria de Séries TemporaisRAinda não há avaliações
- Inspeção por emissão acústica em vasos de pressão durante ensaioDocumento16 páginasInspeção por emissão acústica em vasos de pressão durante ensaiobrunolacerdajrAinda não há avaliações
- 80660-Texto Do Artigo-311156-1-10-20220916Documento21 páginas80660-Texto Do Artigo-311156-1-10-20220916Del CosteAinda não há avaliações
- Análise séries temporais epidemiologiaDocumento8 páginasAnálise séries temporais epidemiologiasssAinda não há avaliações
- Cobra 148 GTL Português (40 Canais)Documento24 páginasCobra 148 GTL Português (40 Canais)Carlos Alberto Bento da Silva100% (1)