Você também pode gostar
- Qualidade Energia Elétrica 2Documento20 páginasQualidade Energia Elétrica 2apofAinda não há avaliações
- 13 - Controle Automatico Da GeraçãoDocumento36 páginas13 - Controle Automatico Da GeraçãoBia Fernanda Verly MartinsAinda não há avaliações
- Conversor Ac AcDocumento22 páginasConversor Ac AcAndré Duarte100% (1)
- ApostilaSEP IDocumento125 páginasApostilaSEP INathalia OliveiraAinda não há avaliações
- Distribuição 3oEEDocumento10 páginasDistribuição 3oEEEduardo MouraAinda não há avaliações
- EstabDocumento32 páginasEstabTaumar MoraisAinda não há avaliações
- Correção Do Factor de PotenciaDocumento10 páginasCorreção Do Factor de Potenciaarieiro100% (1)
- 1 - Apostila - Retificadores Não ControladosDocumento15 páginas1 - Apostila - Retificadores Não ControladosFRANCISCO C.N. SANTOSAinda não há avaliações
- Projeto de Melhoria Do Sistema de ExcitaçãoDocumento34 páginasProjeto de Melhoria Do Sistema de ExcitaçãoRobson IastremskiAinda não há avaliações
- Regulação de Velocidade de Um MCC Através Do Controle Da Corrente de Armadura, Utilizando Lógica FuzzyDocumento5 páginasRegulação de Velocidade de Um MCC Através Do Controle Da Corrente de Armadura, Utilizando Lógica FuzzyBruno SantosAinda não há avaliações
- 3 Sist PuDocumento9 páginas3 Sist PuAdriano D. KoehlerAinda não há avaliações
- 1 Apresentação1Documento12 páginas1 Apresentação1Abednego BasílioAinda não há avaliações
- Introdução Aos Acionamentos ElétricosDocumento20 páginasIntrodução Aos Acionamentos ElétricosDiego FreireAinda não há avaliações
- p9 MotoresDocumento8 páginasp9 Motoresats 85Ainda não há avaliações
- Primeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Documento5 páginasPrimeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Rodrigo LimaAinda não há avaliações
- Lista de Exercícios 1 FCT PDFDocumento13 páginasLista de Exercícios 1 FCT PDFGabrielAinda não há avaliações
- Laborato - Rio 1 - P2Documento3 páginasLaborato - Rio 1 - P2Michael ZardoAinda não há avaliações
- Experimento 02 - Utilização de Transformadores Parte 02Documento3 páginasExperimento 02 - Utilização de Transformadores Parte 02Eng. Clínica Hosp. 9 de JulhoAinda não há avaliações
- Compensação de Reativos em Linha de TransmissãoDocumento6 páginasCompensação de Reativos em Linha de TransmissãoGRVCientistaAinda não há avaliações
- Aula 03Documento12 páginasAula 03José HaislanAinda não há avaliações
- Aula 08 - Fator de PotênciaDocumento29 páginasAula 08 - Fator de Potênciabersilveira8645Ainda não há avaliações
- Conversores CA-CC - Retificadores - 2Documento28 páginasConversores CA-CC - Retificadores - 2Carolina CésarAinda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Rela To Rio Final EspDocumento31 páginasRela To Rio Final EspLuise CardozoAinda não há avaliações
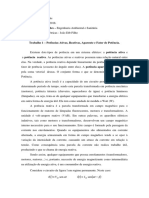
- Trabalho 1 - PotênciasDocumento5 páginasTrabalho 1 - PotênciasClaudia de Sousa GuedesAinda não há avaliações
- Abnt TCDocumento5 páginasAbnt TCrogerioaavelinoAinda não há avaliações
- Aula4 Conversores CC CCDocumento9 páginasAula4 Conversores CC CCconradoalmir1Ainda não há avaliações
- Anotações - Introdução Transmissão de Energia Elétrica 2Documento37 páginasAnotações - Introdução Transmissão de Energia Elétrica 2J FigueiredoAinda não há avaliações
- Capitulo 1 ISEPDocumento25 páginasCapitulo 1 ISEPVitor Abreu MartinsAinda não há avaliações
- Conservação de EnergiaDocumento7 páginasConservação de EnergiaEder IvanAinda não há avaliações
- Determinação de Parâmetros UFC (Roteiro)Documento6 páginasDeterminação de Parâmetros UFC (Roteiro)Iago Oliveira deSouzaAinda não há avaliações
- Constituição Dos Sistemas Elétricos de Potência PDFDocumento54 páginasConstituição Dos Sistemas Elétricos de Potência PDFRonildoAinda não há avaliações
- Relatório de Máquinas 05 - Brenda FarahDocumento23 páginasRelatório de Máquinas 05 - Brenda FarahBrenda Montes Cardoso FarahAinda não há avaliações
- Operação Interligada de Sistemas ElétricosDocumento9 páginasOperação Interligada de Sistemas ElétricosAAFDZ_Henrique100% (1)
- Efeito Ferranti PDFDocumento4 páginasEfeito Ferranti PDFRonald Cano CaladAinda não há avaliações
- Lista Cap 4 - Aspectos B Sicos Da Transmiss o de EnergiaDocumento17 páginasLista Cap 4 - Aspectos B Sicos Da Transmiss o de EnergiaClauberto JúniorAinda não há avaliações
- Inversores de Frequência PDFDocumento18 páginasInversores de Frequência PDFJabulani2010100% (1)
- ACIONAMENTOS ELÉTRICOS-mescladoDocumento187 páginasACIONAMENTOS ELÉTRICOS-mescladoRoberta Janaina Silva60% (5)
- Cap 1Documento16 páginasCap 1Joao AfonsoAinda não há avaliações
- Ceel2013 065 PDFDocumento6 páginasCeel2013 065 PDFrenata_freitas_60Ainda não há avaliações
- 2º ExperimentoDocumento2 páginas2º ExperimentomirelleAinda não há avaliações
- EXERC. Repr - de - SEE - Diags - Unifilar - e - ImpedanciaDocumento31 páginasEXERC. Repr - de - SEE - Diags - Unifilar - e - ImpedanciaGuilherme DuarteAinda não há avaliações
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
- Classificaçäo - ConversoresDocumento28 páginasClassificaçäo - ConversoresVinicius CavalcanteAinda não há avaliações
- Te339 Sistema PuDocumento24 páginasTe339 Sistema PuEpitácio Junior Mauriz de Moura FeitosaAinda não há avaliações
- Cce0767 Pçaxi 16052018Documento7 páginasCce0767 Pçaxi 16052018Antonio Carvalho0% (1)
- Resumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonDocumento10 páginasResumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonJOÃO VITOR MONTES PINHEIROAinda não há avaliações
- Motores ElétricosDocumento50 páginasMotores ElétricosMarco Antonio Esquivel Barreto100% (3)
- Transitórios e DesequilíbriosDocumento18 páginasTransitórios e Desequilíbriosdfrc01Ainda não há avaliações
- Trabalho 2Documento5 páginasTrabalho 2Henrique CostaAinda não há avaliações
- 002-Aula 01 - Representação Do SEP PDFDocumento29 páginas002-Aula 01 - Representação Do SEP PDFMárcio TamashiroAinda não há avaliações
- Artigo ATP EolicaDocumento6 páginasArtigo ATP EolicaGuilherme Henrique Bernardes CunhaAinda não há avaliações
- Sistema PU I - Exercicio 3Documento31 páginasSistema PU I - Exercicio 3Anderson FerrazAinda não há avaliações
- Parte elétrica e dispositivos elétricos da NR 12: conceitos básicos e fundamentais para a compreensão da normaNo EverandParte elétrica e dispositivos elétricos da NR 12: conceitos básicos e fundamentais para a compreensão da normaNota: 5 de 5 estrelas5/5 (3)
- Oceanografia - Aula 1 GeomorfologiaDocumento53 páginasOceanografia - Aula 1 GeomorfologiaJadson FreireAinda não há avaliações
- PPP Amaro AbilioDocumento4 páginasPPP Amaro AbilioBruno Hideki NonakaAinda não há avaliações
- Memorial de Cálculo A1 FinalDocumento3 páginasMemorial de Cálculo A1 FinalRicardo gonçalvesAinda não há avaliações
- InstalaçãoDocumento202 páginasInstalaçãoStolano BrasilianoAinda não há avaliações
- Teste Os Maias Hipodromo Marco 2010Documento12 páginasTeste Os Maias Hipodromo Marco 2010Filipa SilvaAinda não há avaliações
- MAC AmostraDocumento37 páginasMAC AmostraDália Ratão SimõesAinda não há avaliações
- Curriculo Basico 3 Edicao 2015Documento294 páginasCurriculo Basico 3 Edicao 2015Alessandra Santos FrazatoAinda não há avaliações
- Obsessão EletronicaDocumento3 páginasObsessão EletronicaGilzevandro SanchesAinda não há avaliações
- 16 - Lista 7 - Física IIIDocumento4 páginas16 - Lista 7 - Física IIIItalo RiccelliAinda não há avaliações
- Expressões Algébricas - OdtDocumento7 páginasExpressões Algébricas - OdtMARIA VIRGÍNIA REISAinda não há avaliações
- Rosqueamento Com TornoDocumento11 páginasRosqueamento Com Tornoluizc211100% (1)
- Programa de Treinamento Fsico para Militares em Preparao para Misses de Paz Da ONU PDFDocumento44 páginasPrograma de Treinamento Fsico para Militares em Preparao para Misses de Paz Da ONU PDFVinicyus MartinsAinda não há avaliações
- Apostila Design de Sobrancelhas (Atualizada 2024) - PDFDocumento30 páginasApostila Design de Sobrancelhas (Atualizada 2024) - PDFAtendimento 4 - Gráfica PrintsAinda não há avaliações
- GargulasDocumento7 páginasGargulasJoao Marcelo Carvalho Leite100% (1)
- Manual Rede Devicenet PowerFlex 753Documento148 páginasManual Rede Devicenet PowerFlex 753Artur Henrique100% (1)
- Gerencia de Memória VirtualDocumento4 páginasGerencia de Memória VirtualReginaAinda não há avaliações
- Ethereal Flowers Nível 1Documento17 páginasEthereal Flowers Nível 1Rafael Azzolin Pacheco100% (1)
- Apostila Armamento CFSDDocumento34 páginasApostila Armamento CFSDRamon Domingues WellnerAinda não há avaliações
- Nouvelle Vague SoviéticaDocumento85 páginasNouvelle Vague SoviéticaEwerton BelicoAinda não há avaliações
- Apdd 735 - 125-200hp Serie BDocumento48 páginasApdd 735 - 125-200hp Serie BsmcompressoresAinda não há avaliações
- 3 TandenDocumento3 páginas3 TandenRomulo PimentaAinda não há avaliações
- Campo Elétrico - ExercíciosDocumento10 páginasCampo Elétrico - ExercíciosDeusDosPudinsAinda não há avaliações
- BolGeoCiencias Bacias AsmusDocumento36 páginasBolGeoCiencias Bacias AsmusgenniluccAinda não há avaliações
- Catalogo - Linha de Contatores AX - Portugues PDFDocumento112 páginasCatalogo - Linha de Contatores AX - Portugues PDFNuno HenriquesAinda não há avaliações
- Teoria Da MagiaDocumento3 páginasTeoria Da MagiaCarlosAinda não há avaliações
- Lista III FísicaDocumento3 páginasLista III FísicaSindico J.A.A100% (1)
- Máximo Do Aluno - Rumo Ao ExameDocumento11 páginasMáximo Do Aluno - Rumo Ao ExameAna RodriguesAinda não há avaliações
- QuestõesDocumento3 páginasQuestõesgcds1Ainda não há avaliações
- Física 2Documento35 páginasFísica 2Sergio CarvalhoAinda não há avaliações
- Resistencia Dos Materiais - ResolvidoDocumento8 páginasResistencia Dos Materiais - ResolvidoRamom Diniz100% (1)